

 Электроника
ЭлектроникаПохожие презентации:







")
")

Синхронные машины. Энергетические диаграммы
1.
Синхронные машины2.
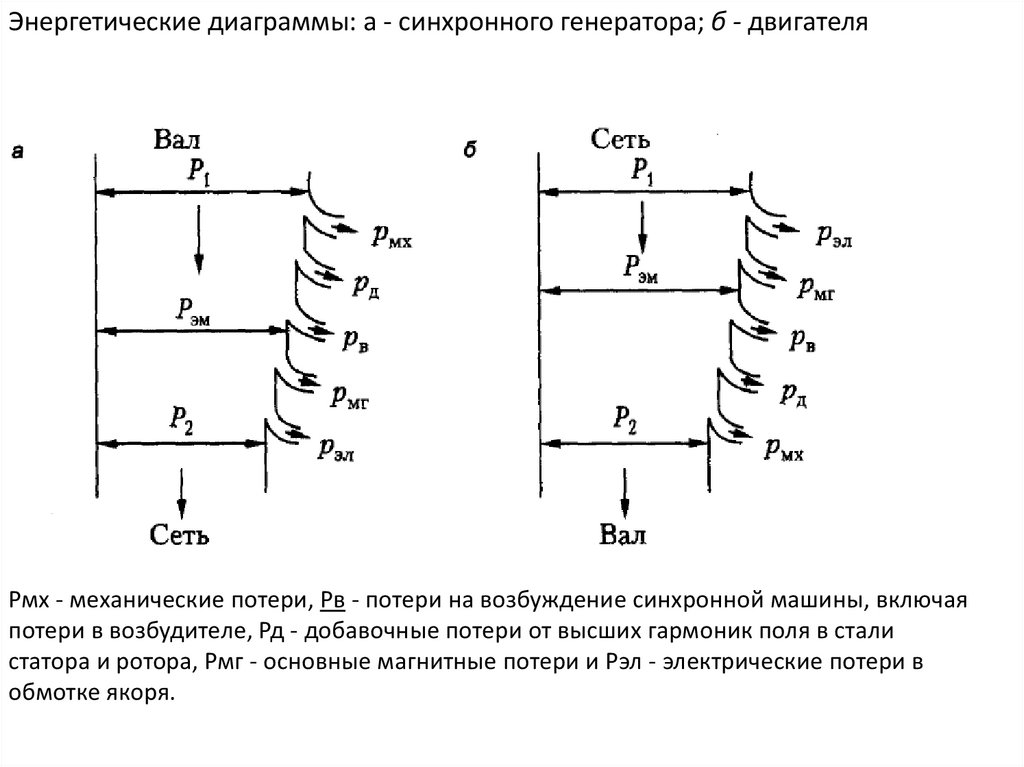
Энергетические диаграммы: а - синхронного генератора; б - двигателяРмх - механические потери, Рв - потери на возбуждение синхронной машины, включая
потери в возбудителе, Рд - добавочные потери от высших гармоник поля в стали
статора и ротора, Рмг - основные магнитные потери и Рэл - электрические потери в
обмотке якоря.
3.
Синхронные двигателиПреимущества синхронных двигателей.
1. Могут работать при cosϕ = 1 и не потребляют реактивной мощности из сети,
а при перевозбуждении могут отдавать реактивную мощность в сеть.
2. Максимальный момент синхронного двигателя пропорционален U,
а у асинхронного двигателя U2
3. Возможность увеличения тока iв в СД позволяет увеличить надежность
их работы при аварийных режимах, когда Uc снижается
4. Вследствие большого δ добавочные потери в стали СД меньше, чем АД, т.е. КПД выше
5. Независимо от нагрузки у СД n = const
В то же время конструкция синхронных двигателей сложнее, чем устройство короткозамкнутых
асинхронных двигателей, и, кроме того, синхронные двигатели должны иметь возбудитель или иное
устройство для питания обмотки возбуждения постоянным током. Вследствие этого синхронные
двигатели в большинстве случаев дороже короткозамкнутых асинхронных двигателей.
Пуск синхронных двигателей также сложнее, и регулировать частоту их вращения можно только
регулированием частоты напряжения.
Способы пуска
1. Способ вспомогательного двигателя
2. Частотный пуск
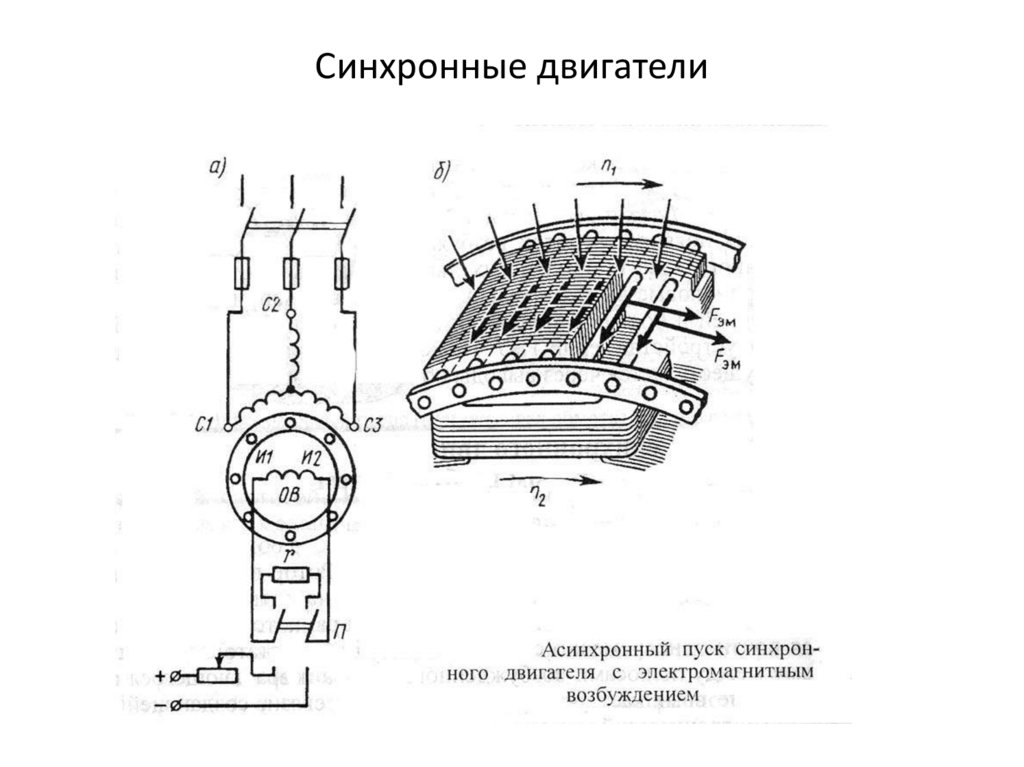
3. Асинхронный пуск.
4.
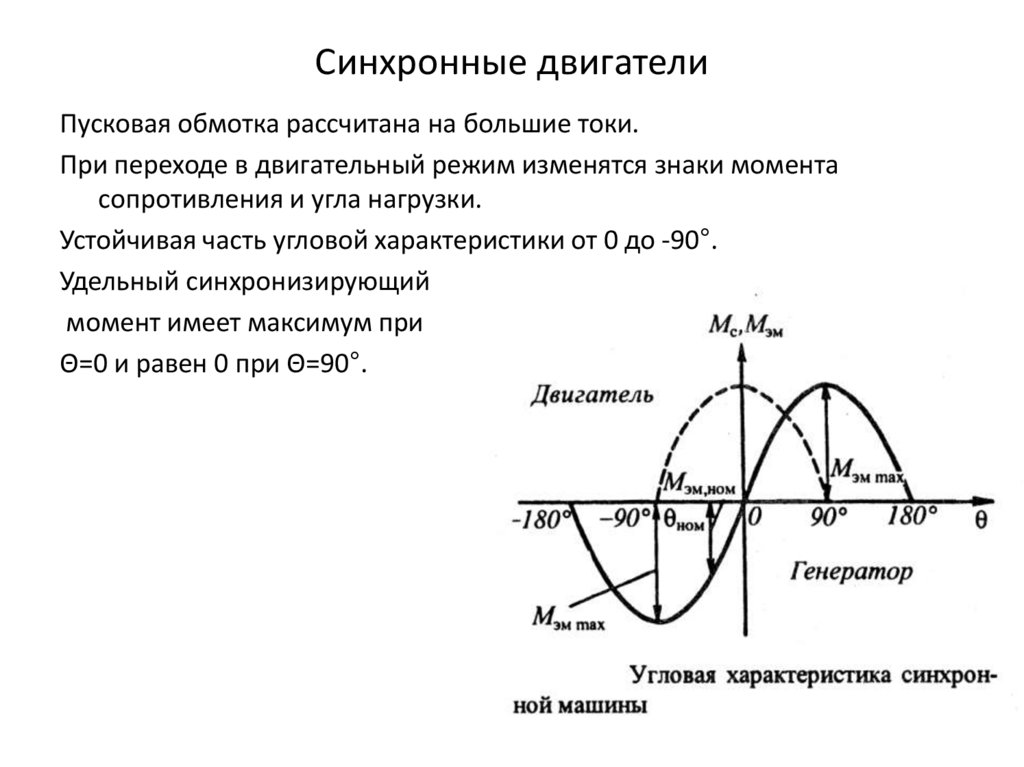
Синхронные двигателиПусковая обмотка рассчитана на большие токи.
При переходе в двигательный режим изменятся знаки момента
сопротивления и угла нагрузки.
Устойчивая часть угловой характеристики от 0 до -90°.
Удельный синхронизирующий
момент имеет максимум при
Θ=0 и равен 0 при Θ=90°.
5.
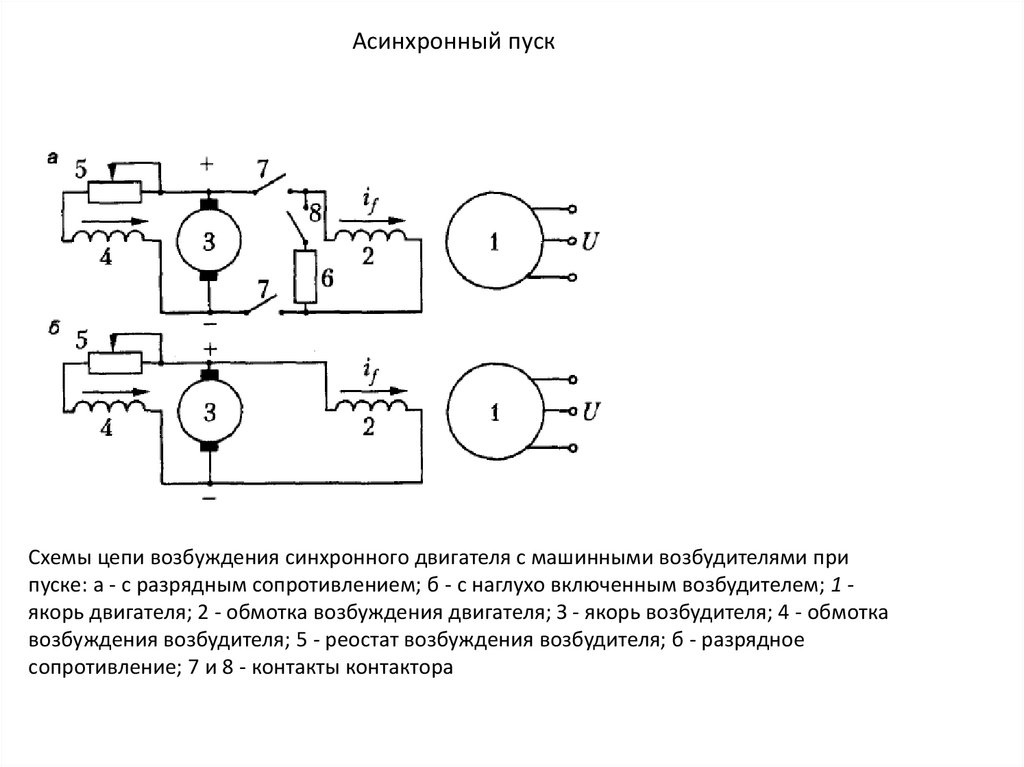
Асинхронный пускСхемы цепи возбуждения синхронного двигателя с машинными возбудителями при
пуске: а - с разрядным сопротивлением; б - с наглухо включенным возбудителем; 1 якорь двигателя; 2 - обмотка возбуждения двигателя; З - якорь возбудителя; 4 - обмотка
возбуждения возбудителя; 5 - реостат возбуждения возбудителя; б - разрядное
сопротивление; 7 и 8 - контакты контактора
6.
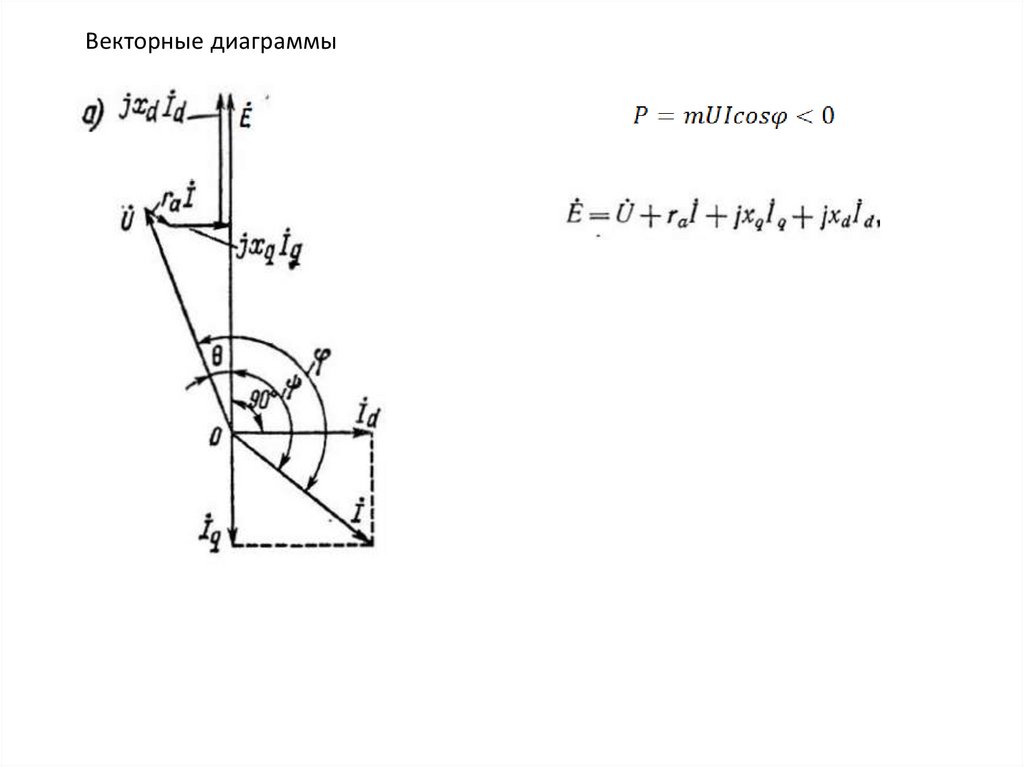
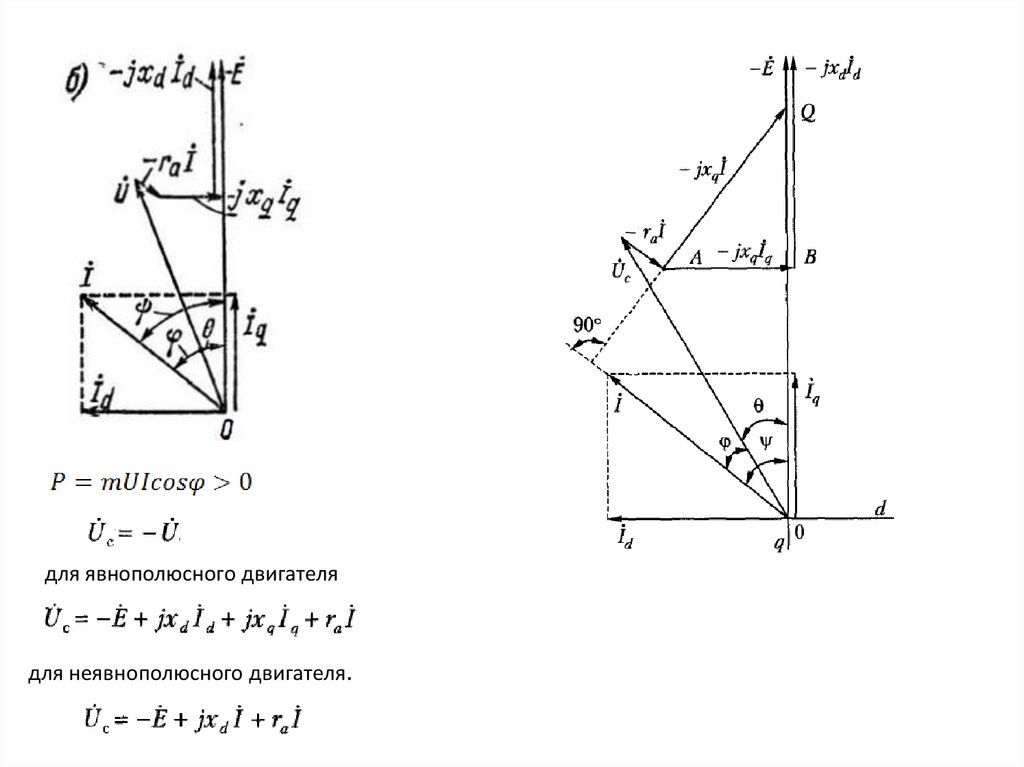
Векторные диаграммы7.
для явнополюсного двигателядля неявнополюсного двигателя.
8.
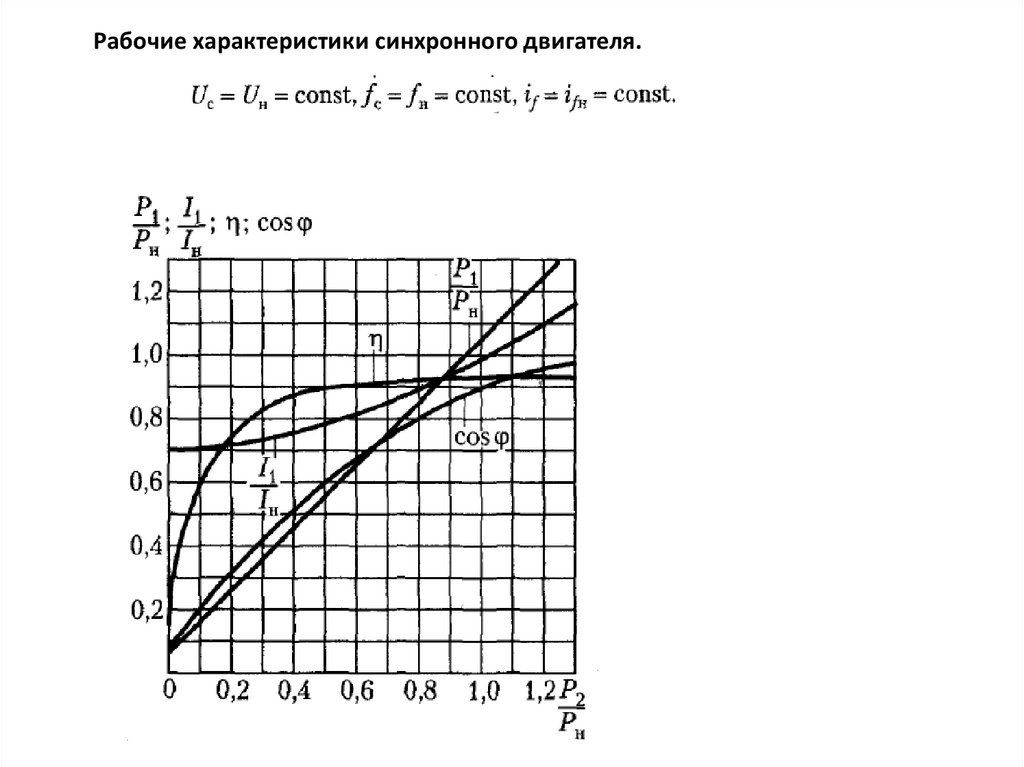
Рабочие характеристики синхронного двигателя.9.
Синхронные двигатели10.
Что такое реакция якоря?Магнитное поле статора, накладываясь на магнитное
поле ротора, может либо ослаблять, либо усиливать его.
Результат взаимодействия этих полей определяют
величина и характер нагрузки CГ.
Влияние магнитного поля статора на
магнитное поле, создаваемое вращающимися
полюсами ротора, называют реакцией якоря.
Явление реакции якоря имеется и в синхронных
двигателях, но поскольку в СД форма кривой ЭДС
малосущественна, то реакция якоря в СД имеет
второстепенное значение.
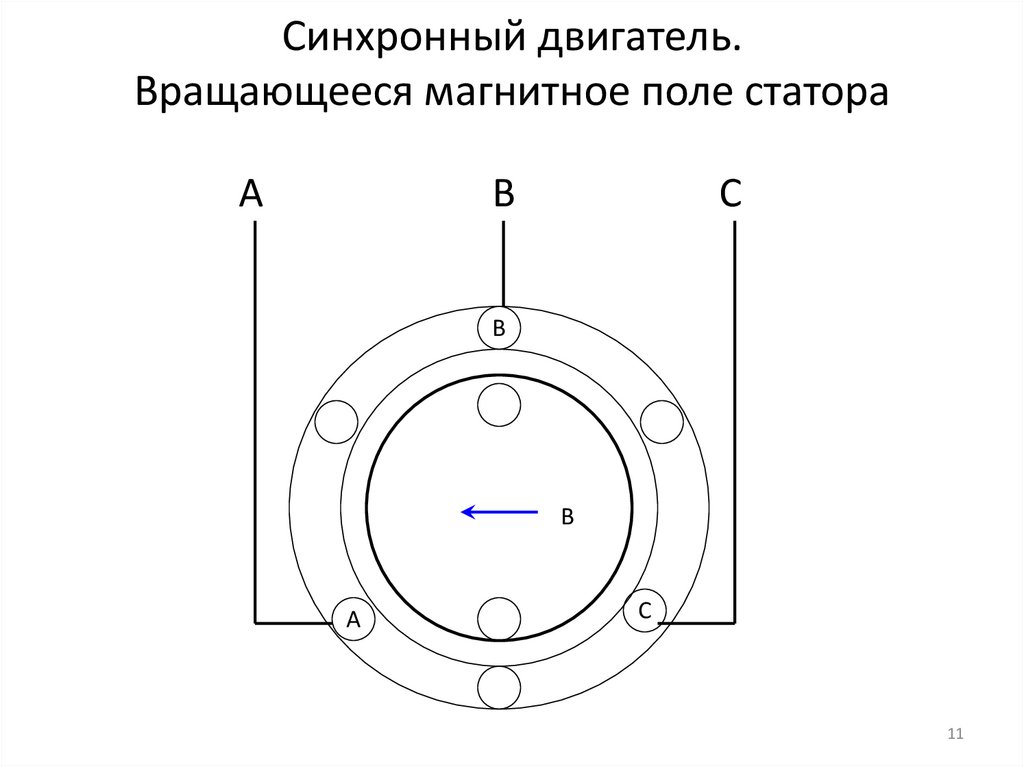
11.
Синхронный двигатель.Вращающееся магнитное поле статора
А
В
С
В
В
А
С
11
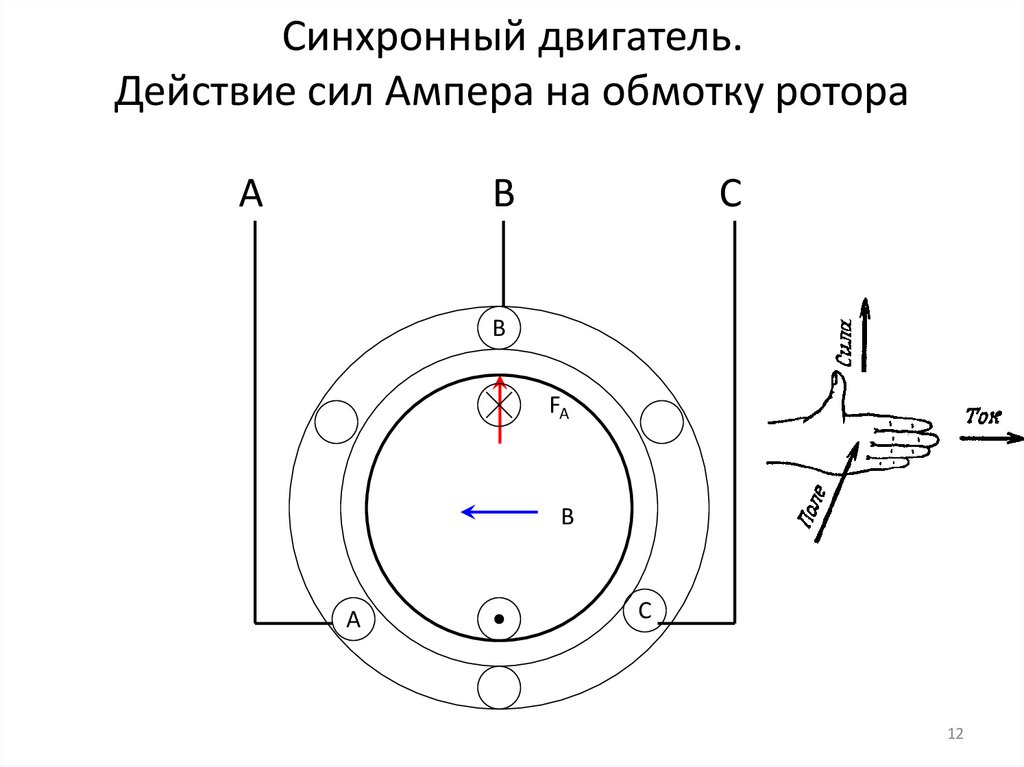
12.
Синхронный двигатель.Действие сил Ампера на обмотку ротора
А
В
С
В
FA
В
А
С
12
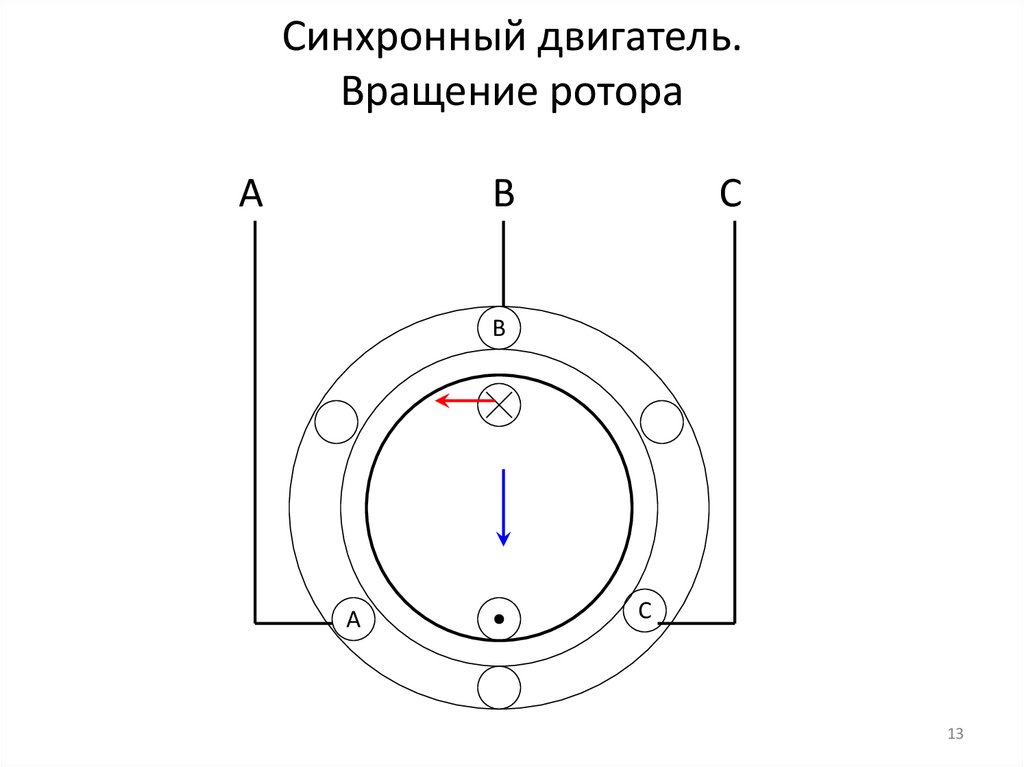
13.
Синхронный двигатель.Вращение ротора
А
В
С
В
А
С
13
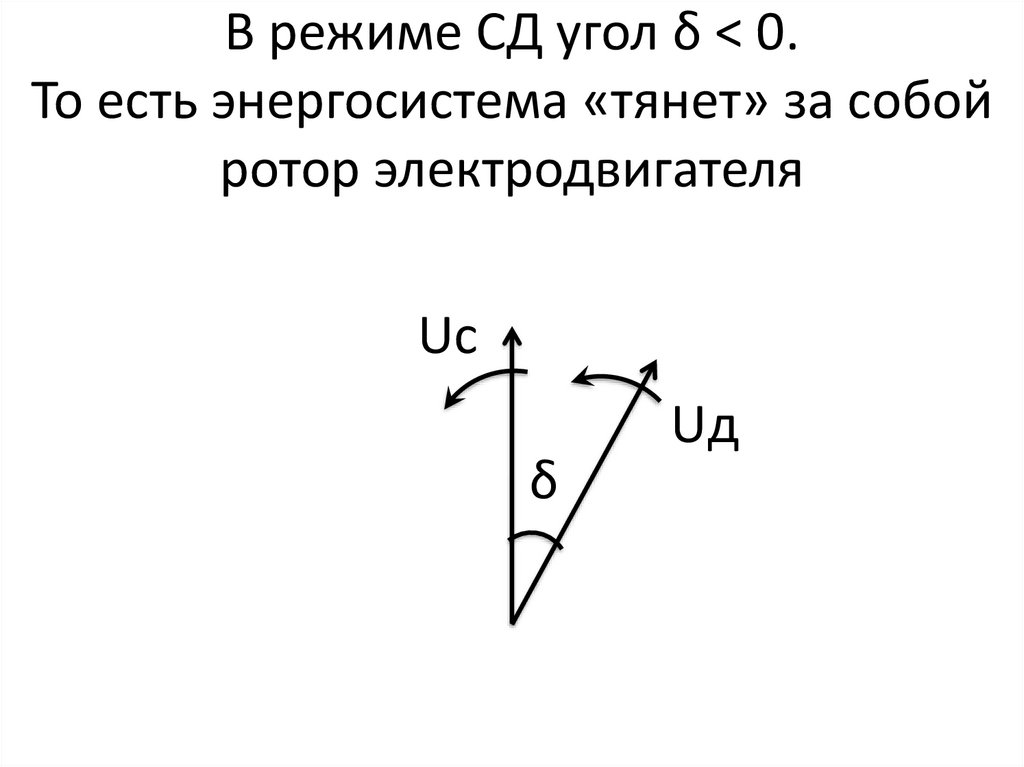
14.
В режиме СД угол δ < 0.То есть энергосистема «тянет» за собой
ротор электродвигателя
Uс
δ
Uд
15.
n0N
N
Nm F
П
F
N S
S
П
Fm
SFm
S N
n0
NF
N
S
Ft
N
S
N
Ft
N
S
SS
S
SS
N
N
а)
б)
в
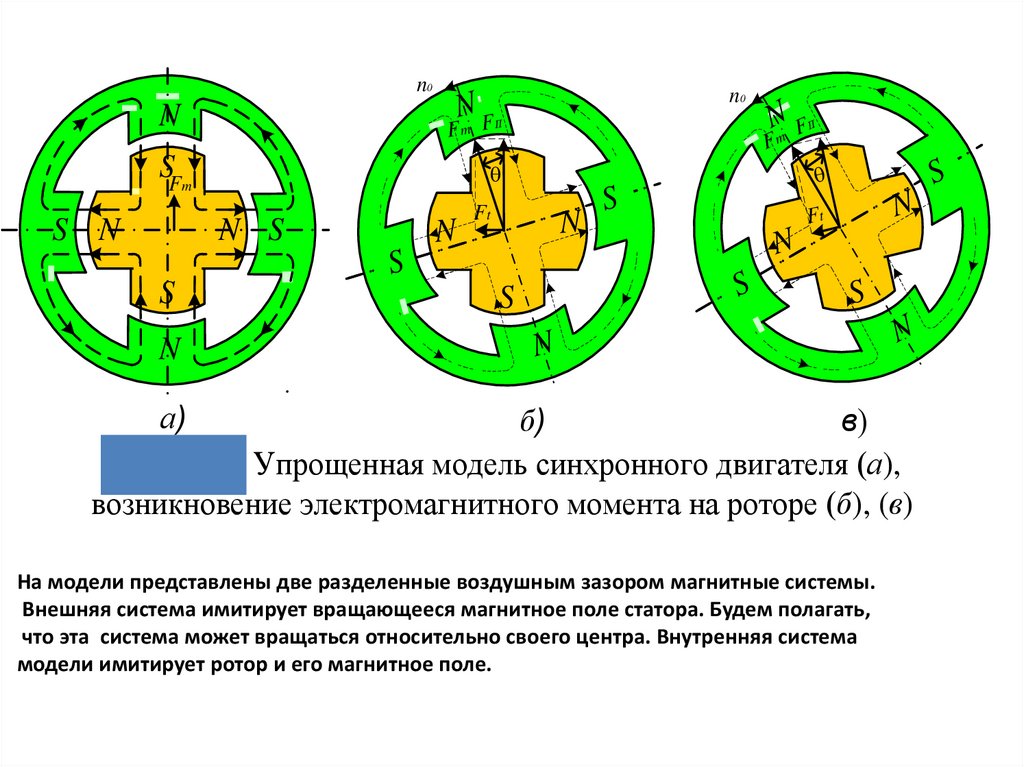
Рис. 17.10. Упрощенная модель синхронного двигателя (а),
возникновение электромагнитного момента на роторе (б), (в)
На модели представлены две разделенные воздушным зазором магнитные системы.
Внешняя система имитирует вращающееся магнитное поле статора. Будем полагать,
что эта система может вращаться относительно своего центра. Внутренняя система
модели имитирует ротор и его магнитное поле.
16.
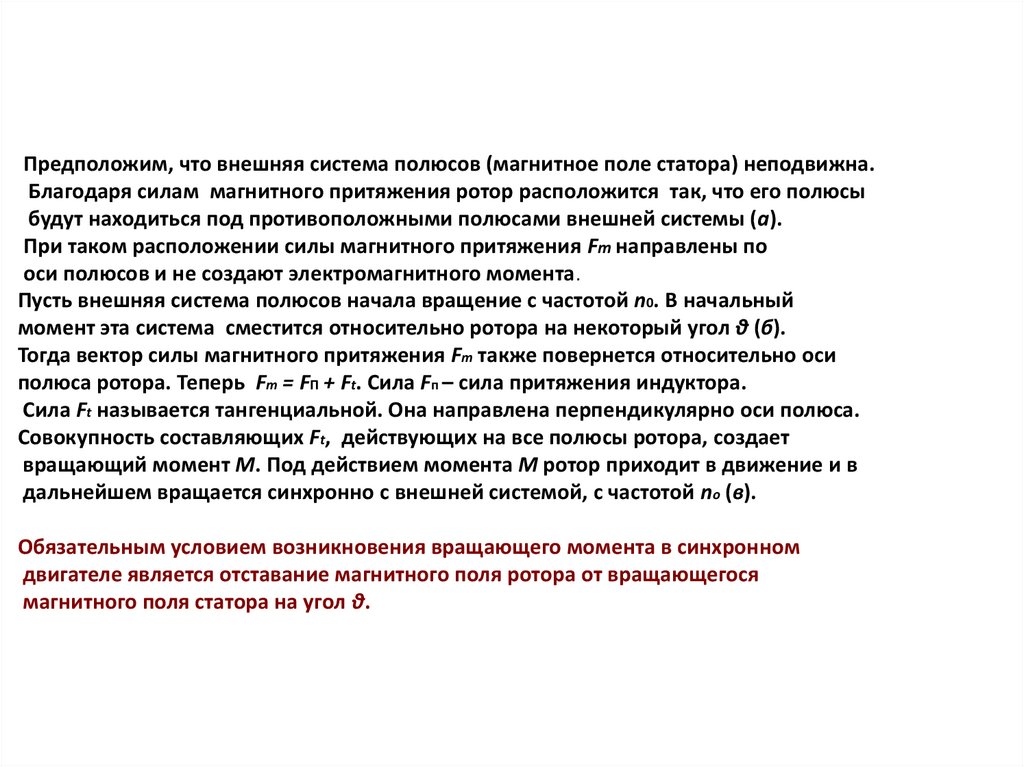
Предположим, что внешняя система полюсов (магнитное поле статора) неподвижна.Благодаря силам магнитного притяжения ротор расположится так, что его полюсы
будут находиться под противоположными полюсами внешней системы (а).
При таком расположении силы магнитного притяжения Fm направлены по
оси полюсов и не создают электромагнитного момента.
Пусть внешняя система полюсов начала вращение с частотой n0. В начальный
момент эта система сместится относительно ротора на некоторый угол θ (б).
Тогда вектор силы магнитного притяжения Fm также повернется относительно оси
полюса ротора. Теперь Fm = FП + Ft. Сила Fп – сила притяжения индуктора.
Сила Ft называется тангенциальной. Она направлена перпендикулярно оси полюса.
Совокупность составляющих Ft, действующих на все полюсы ротора, создает
вращающий момент М. Под действием момента М ротор приходит в движение и в
дальнейшем вращается синхронно с внешней системой, с частотой nо (в).
Обязательным условием возникновения вращающего момента в синхронном
двигателе является отставание магнитного поля ротора от вращающегося
магнитного поля статора на угол θ.
17.
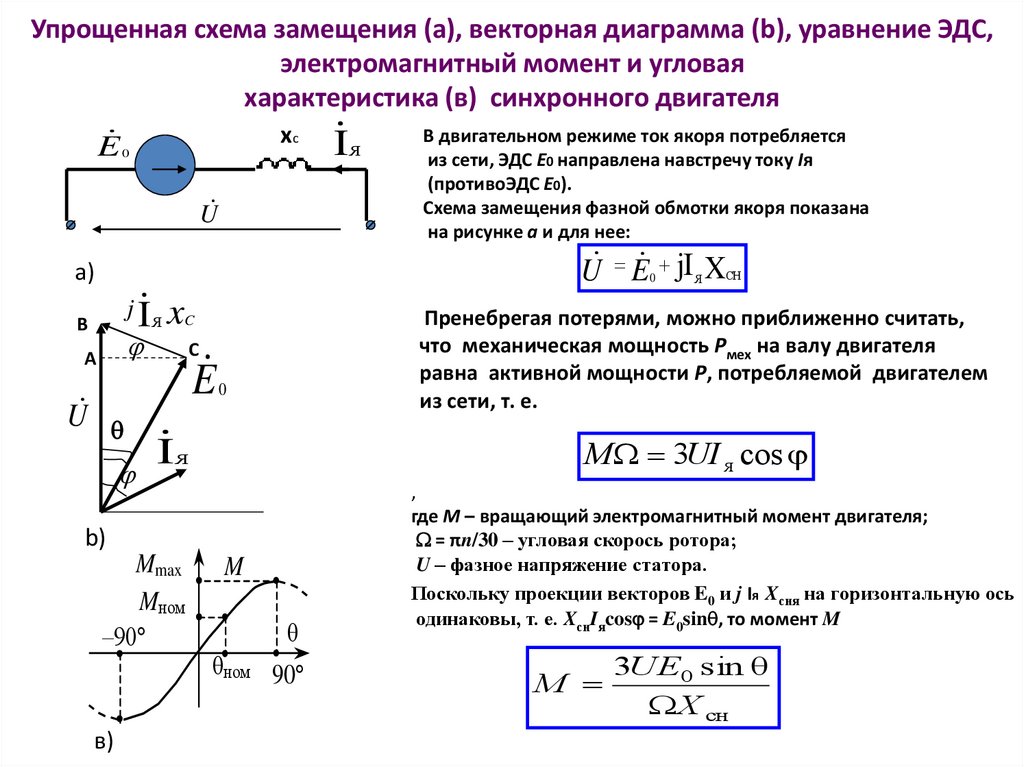
Упрощенная схема замещения (а), векторная диаграмма (b), уравнение ЭДС,электромагнитный момент и угловая
характеристика (в) синхронного двигателя
В двигательном режиме ток якоря потребляется
хс
IЯ
E 0
из сети, ЭДС E0 направлена навстречу току Iя
(противоЭДС E0).
Схема замещения фазной обмотки якоря показана
на рисунке а и для нее:
U
U E jI X
а)
0
В
j
I Я xC
А
С
U
E
I
0
M 3UI я cos
b)
в)
СН
Пренебрегая потерями, можно приближенно считать,
что механическая мощность Pмех на валу двигателя
равна активной мощности P, потребляемой двигателем
из сети, т. е.
Я
Mmax
Mном
–90
Я
M
θ
θном 90
,
где M – вращающий электромагнитный момент двигателя;
= πn/30 – угловая скорось ротора;
U – фазное напряжение статора.
Поскольку проекции векторов E0 и j Iя Xсня на горизонтальную ось
одинаковы, т. е. XснIяcos = E0sin , то момент M
M
3UE0 sin θ
X сн
18.
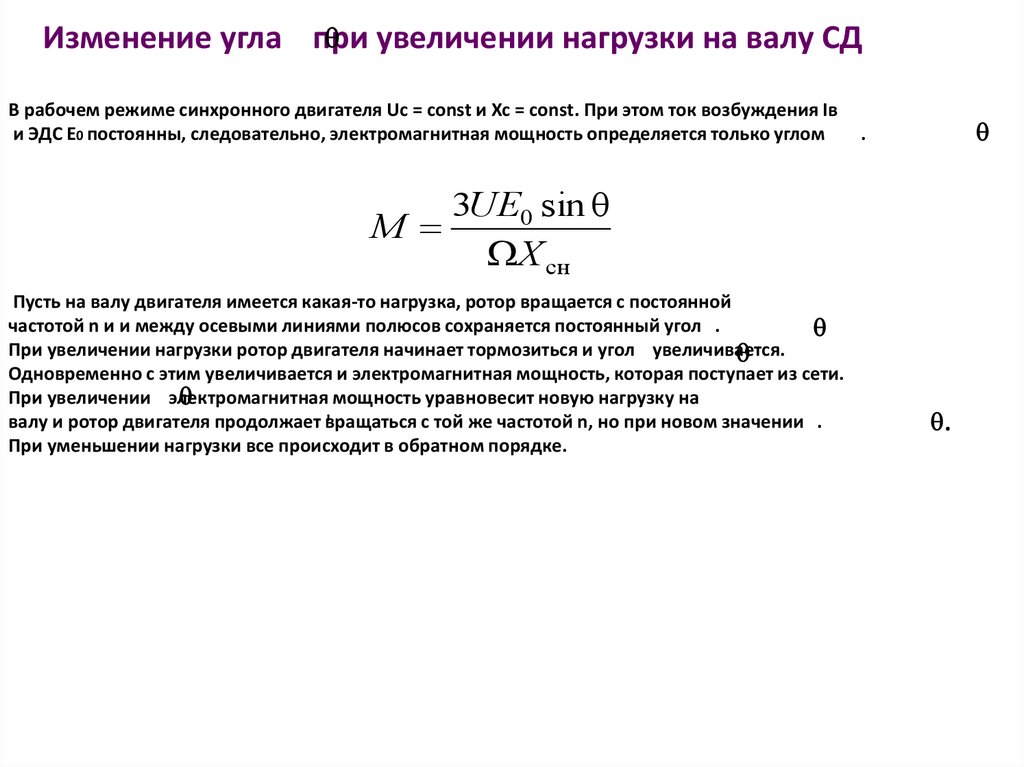
увеличении нагрузки на валу СДИзменение угла при
В рабочем режиме синхронного двигателя Uс = const и Хс = const. При этом ток возбуждения Iв
и ЭДС Е0 постоянны, следовательно, электромагнитная мощность определяется только углом
M
.
3UE0 sin θ
X сн
Пусть на валу двигателя имеется какая-то нагрузка, ротор вращается с постоянной
частотой n и и между осевыми линиями полюсов сохраняется постоянный угол .
При увеличении нагрузки ротор двигателя начинает тормозиться и угол увеличивается.
Одновременно с этим увеличивается и электромагнитная мощность, которая поступает из сети.
При увеличении электромагнитная
мощность уравновесит новую нагрузку на
валу и ротор двигателя продолжает вращаться
с той же частотой n, но при новом значении .
'
При уменьшении нагрузки все происходит в обратном порядке.
.
19.
Механическая характеристика СДn,
об/мин
n0
Режим ХХ
Мн
Номинальный
момент нагрузки на
валу
М, Нм
20.
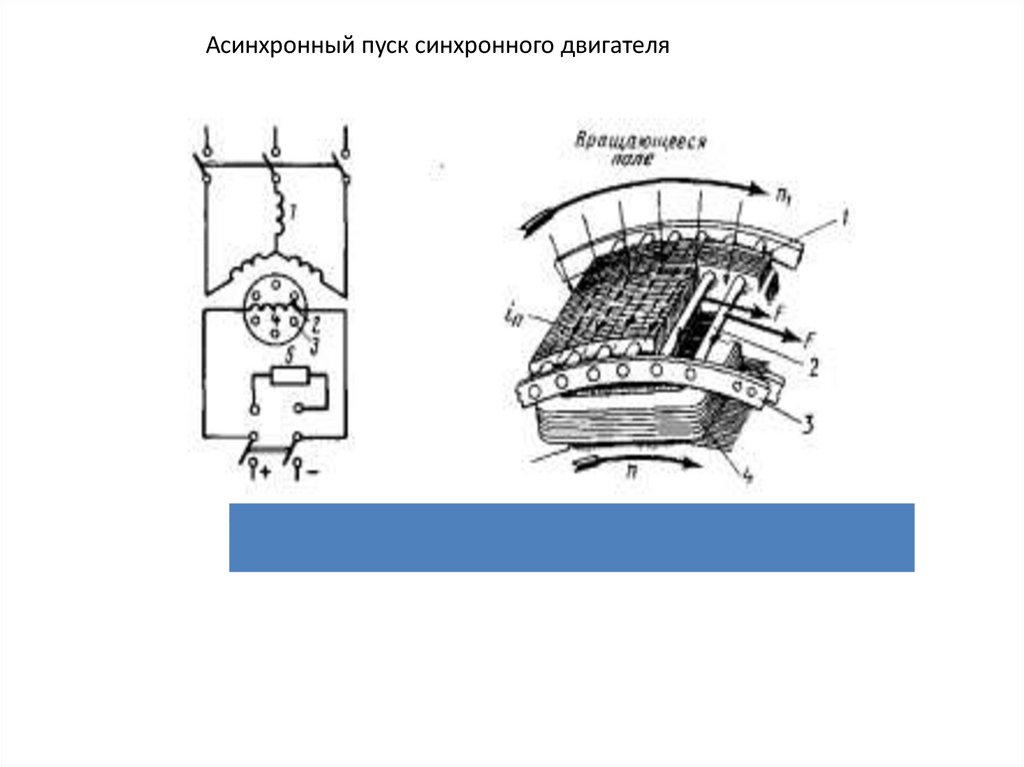
Асинхронный пуск синхронного двигателя21.
Асинхронный пуск СДЗапуск СД невозможен прямым включением в сеть
из-за инерционности ротора
~U (380В)
2. После подключения статора
к сети ~U СД начинает
разгоняться подобно АД с
короткозамкнутым ротором
Для запуска СД ротору необходимо сообщить
скорость, близкую к скорости вращения поля, в
результате чего двигателя втянется в синхронизм и
ротор будет вращаться с синхронной скоростью n0
1. Перед пуском переключатель SA
находится в положении, при котором
ОВ замыкается на ограничительный
резистор R
SA
R
3. После достижения предсинхронной скорости
переключателем SA подключают обмотку ротора
(ОВ) к сети постоянного тока Uв, в результате чего
СД втягивается в синхронизм
+
-
Uв
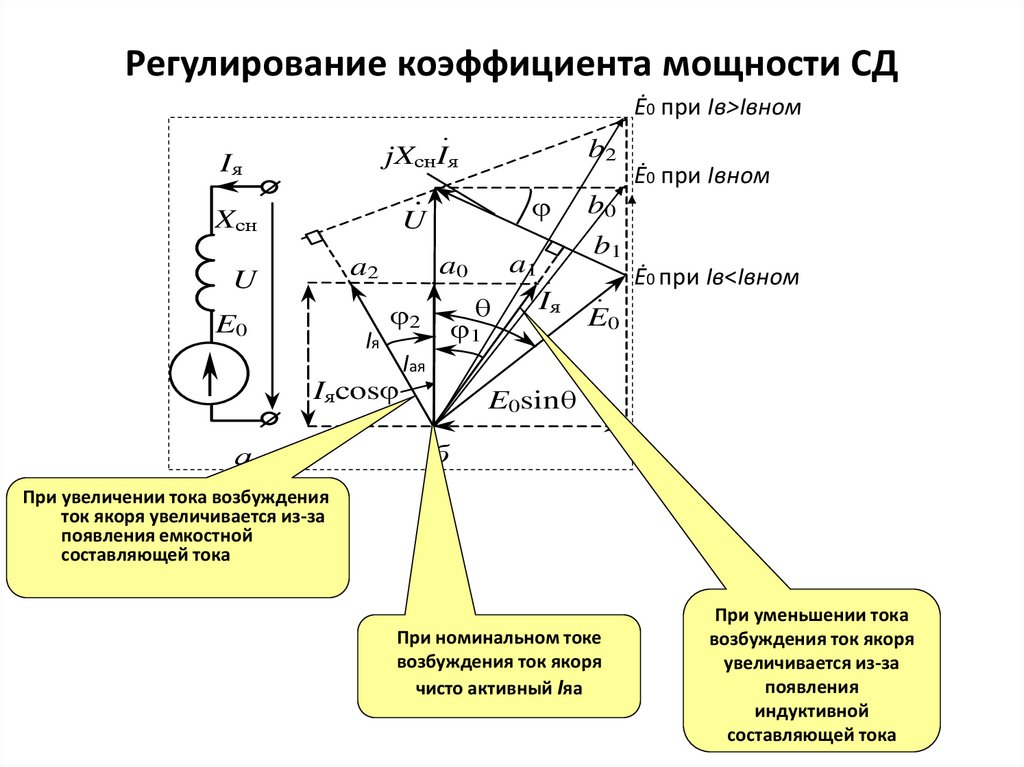
22.
Регулирование коэффициента мощности СДĖ0 при Iв>Iвном
Iя
jXснIя
Xсн
.
U
E0
Iя
φ
θ
φ2
φ1
b0
Ė0 при Iв<Iвном
Iя
E0
Iая
Iяcosφ
а
Ė0 при Iвном
b1
a1
a0
a2
U
b2
E0sinθ
б
При увеличении тока возбуждения
ток якоря увеличивается из-за
появления емкостной
составляющей тока
При номинальном токе
возбуждения ток якоря
чисто активный Iяа
При уменьшении тока
возбуждения ток якоря
увеличивается из-за
появления
индуктивной
составляющей тока
23.
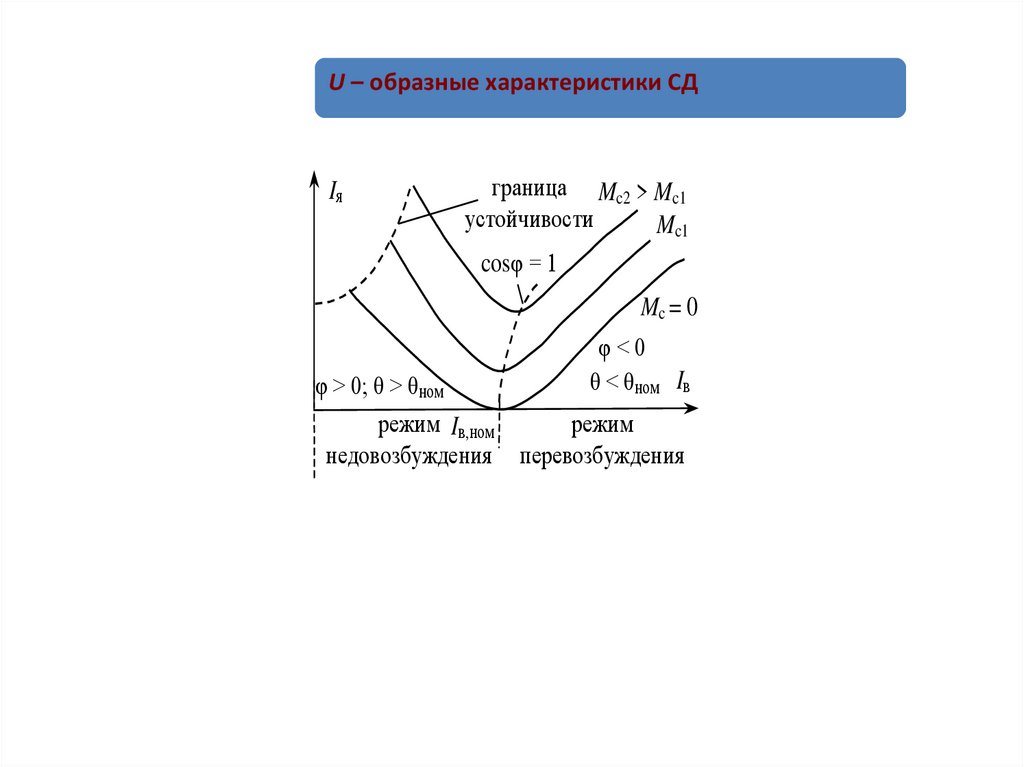
U – образные характеристики СДIя
граница Mc2 > Mc1
устойчивости
Mc1
cosφ = 1
Mc = 0
φ<0
θ < θном Iв
φ > 0; θ > θном
режим Iв,ном
режим
недовозбуждения перевозбуждения
24.
Синхронные компенсаторыЭто синхронная машина, работающая при холостом ходе с
перевозбуждением и применяется для компенсации отстающего тока в сетях
с большой индуктивной нагрузкой. Иногда он работает с недовозбуждением,
когда из-за емкости линии и ее недогрузки ток линии опережает напряжение.
Здесь уменьшается перенапряжение.
Отличия от синхронных двигателей:
Корпус является герметичным, т.к. у синхронных компенсаторов нет
выходного конца вала.
Вал компенсатора существенно тоньше, чем у двигателя, т.к. нет нагрузки.
Не нужен большой максимальный момент, поэтому воздушный зазор
меньше (<xd), что уменьшает обмотку возбуждения.
Синхронные компенсаторы выпускают на мощность до 320 МВА,
номинальным напряжением 6,3…20 кВ, с частотой вращения 750 или 1000
об/мин.
25.
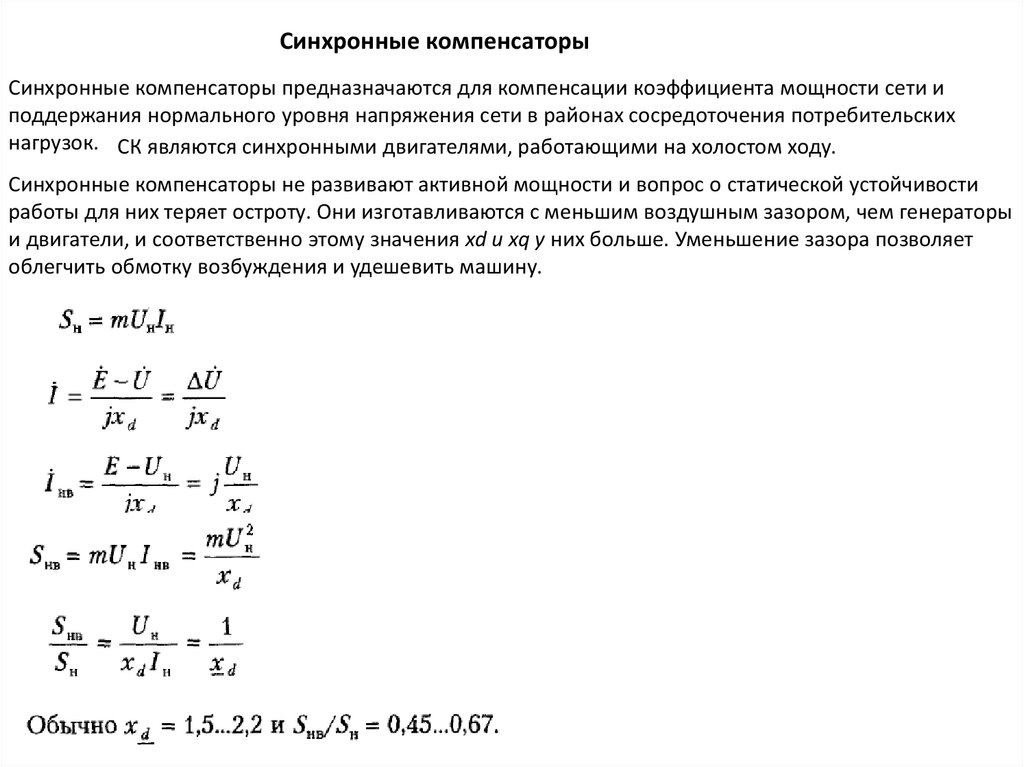
Синхронные компенсаторыСинхронные компенсаторы предназначаются для компенсации коэффициента мощности сети и
поддержания нормального уровня напряжения сети в районах сосредоточения потребительских
нагрузок. СК являются синхронными двигателями, работающими на холостом ходу.
Синхронные компенсаторы не развивают активной мощности и вопрос о статической устойчивости
работы для них теряет остроту. Они изготавливаются с меньшим воздушным зазором, чем генераторы
и двигатели, и соответственно этому значения xd и xq у них больше. Уменьшение зазора позволяет
облегчить обмотку возбуждения и удешевить машину.
26.
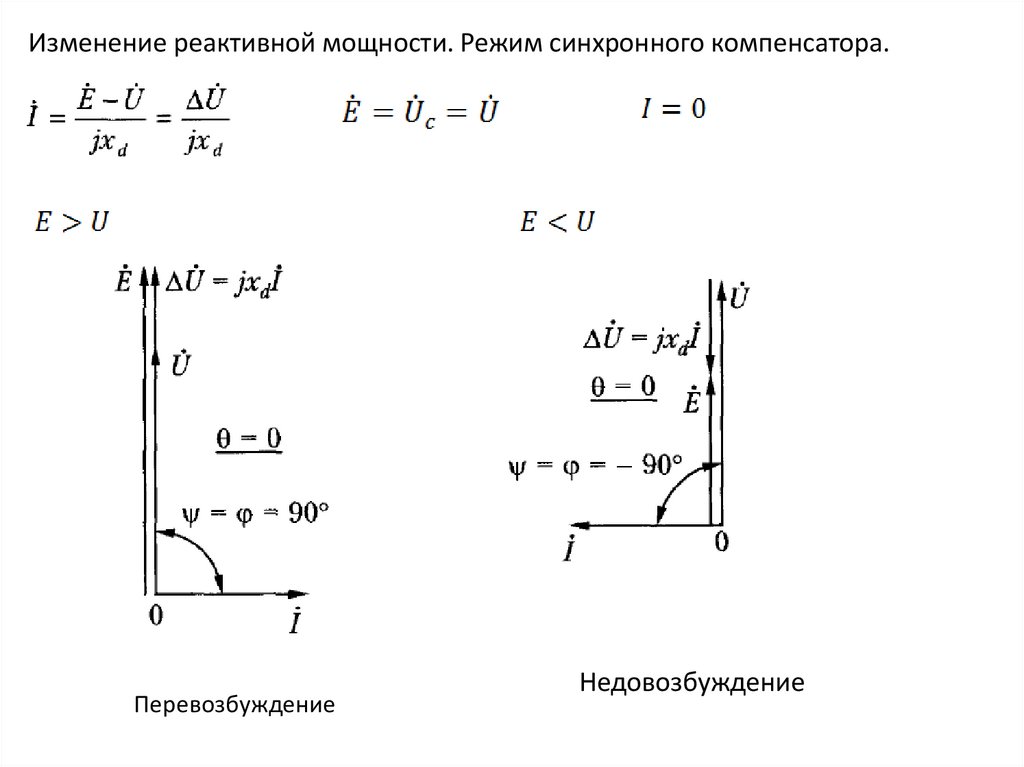
Изменение реактивной мощности. Режим синхронного компенсатора.Перевозбуждение
Недовозбуждение