


 Программное обеспечение
Программное обеспечениеПохожие презентации:










Разработка технологии создания 3D моделей при помощи БПЛА
1.
Тема: Разработкатехнологии создания
3D моделей
при помощи БПЛА
Авторы: Обрадович Владислав Горданович и Иванов Леонид Александрович
Ученики 10 класса
Школа: №1852
Руководитель: Синицина Анна Николаевна
Преподаватель ДТ «Альтаир»
2.
Актуальность проекта:Актуальность проекта, в первую очередь,
обуславливается тем, что создание подобной
технологии упростит процесс построения
3D моделей.
На данный момент автоматизация в данной
области является вопросом активного развития
и совершенствования.
В работе рассматриваются ключевые аспекты,
которые могут стать основой для создания
технологии автоматизированного построения
трехмерных моделей для проектов различного
масштаба.
2
3.
Цель работы:Создание программного
обеспечения для
автоматизированной
генерации трехмерных
моделей по данным с
лазерного дальномера и
снимков с камеры
установленных БПЛА.
3
4.
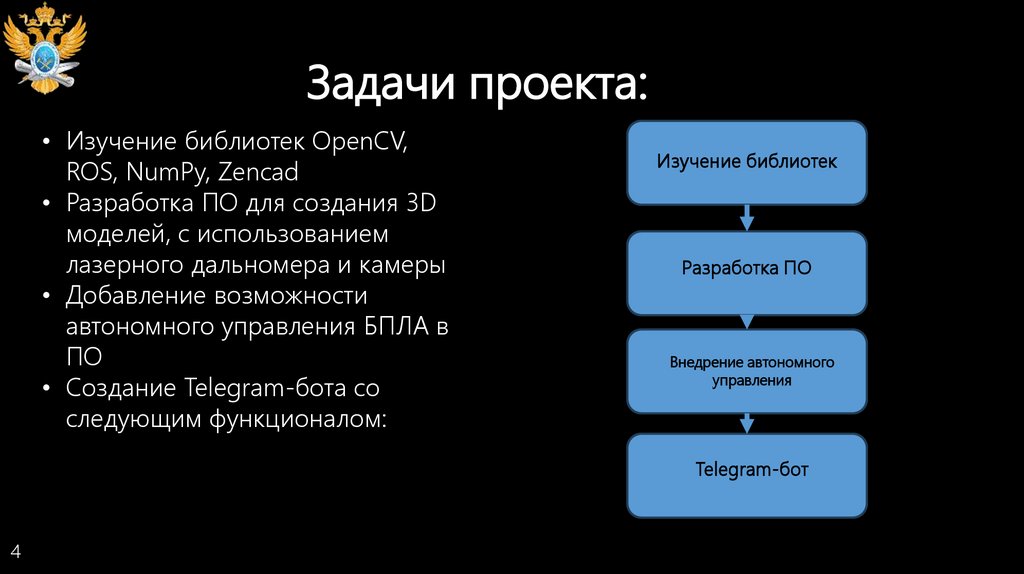
Задачи проекта:• Изучение библиотек OpenCV,
ROS, NumPy, Zencad
• Разработка ПО для создания 3D
моделей, с использованием
лазерного дальномера и камеры
• Добавление возможности
автономного управления БПЛА в
ПО
• Создание Telegram-бота со
следующим функционалом:
Изучение библиотек
Разработка ПО
Внедрение автономного
управления
Telegram-бот
4
5.
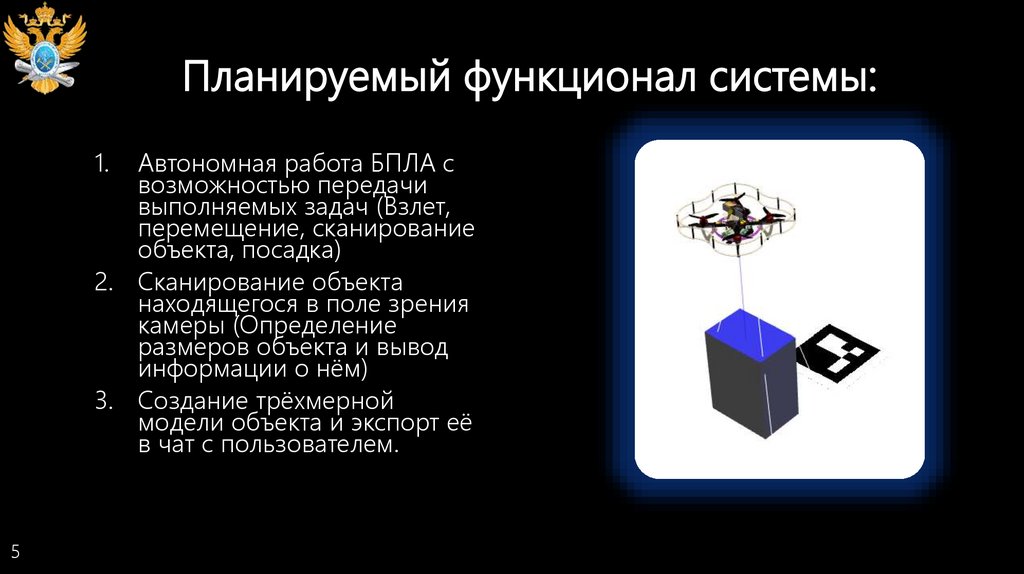
Планируемый функционал системы:1.
Автономная работа БПЛА с
возможностью передачи
выполняемых задач (Взлет,
перемещение, сканирование
объекта, посадка)
2. Сканирование объекта
находящегося в поле зрения
камеры (Определение
размеров объекта и вывод
информации о нём)
3. Создание трёхмерной
модели объекта и экспорт её
в чат с пользователем.
5
6.
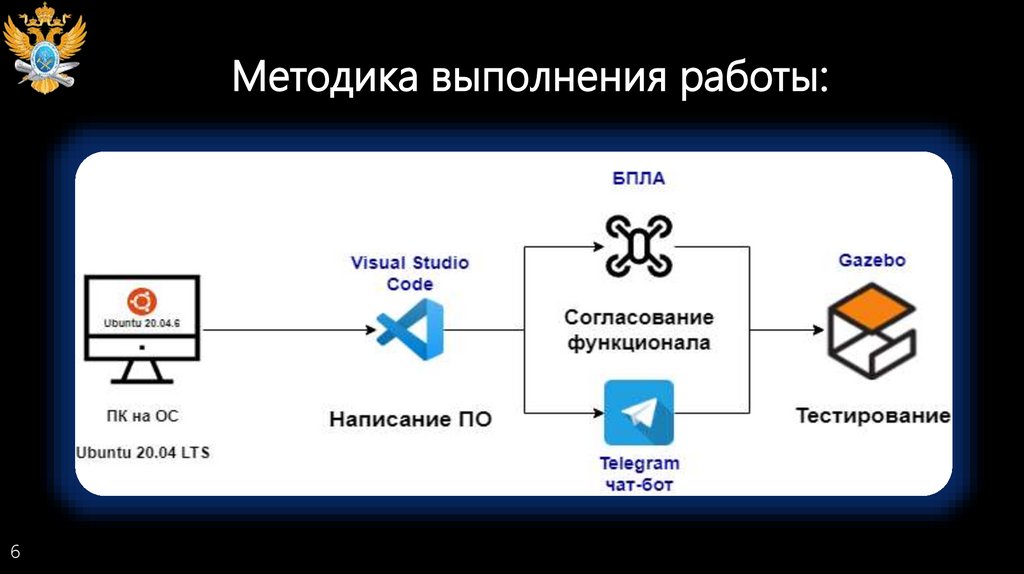
Методика выполнения работы:6
7.
Используемое оборудование:Для работы был использован
симуляция дрона COEX Клевер 4 со
следующими комплектующими:
• Raspberry pi 4 model B 2gb
• Лазерный дальномер VL53L1X
А также производительный
персональный компьютер с:
• OS: Ubuntu 20.04.6 LTS x86_64
• Среда симуляции Gazebo PX4
Ardupilot
7
8.
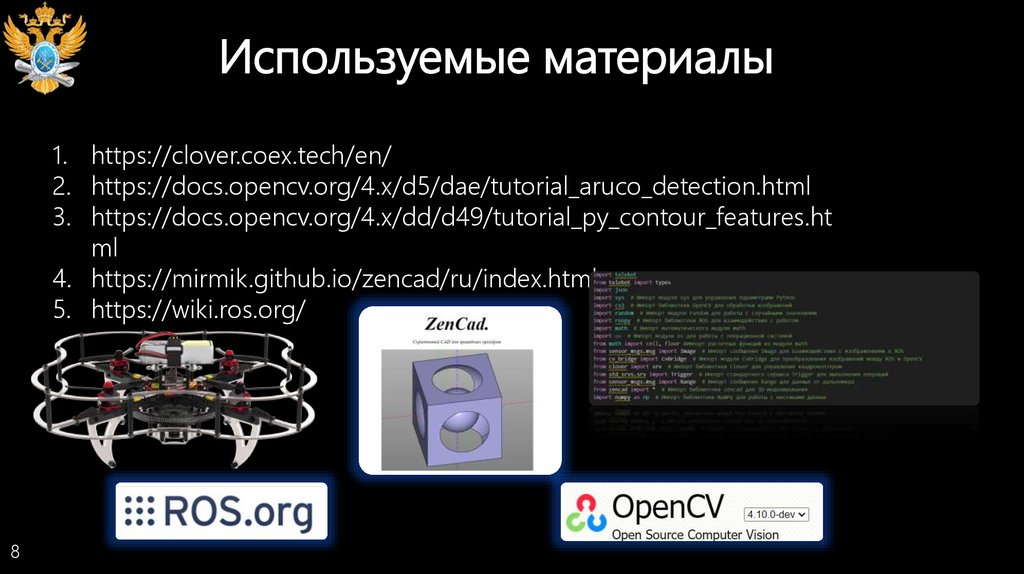
Используемые материалы1. https://clover.coex.tech/en/
2. https://docs.opencv.org/4.x/d5/dae/tutorial_aruco_detection.html
3. https://docs.opencv.org/4.x/dd/d49/tutorial_py_contour_features.ht
ml
4. https://mirmik.github.io/zencad/ru/index.html
5. https://wiki.ros.org/
8
9.
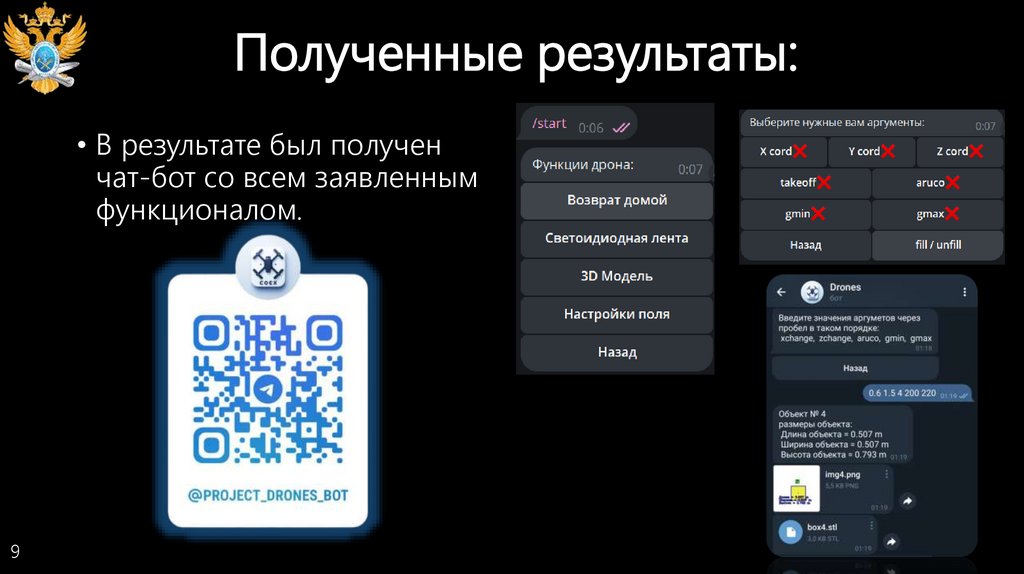
Полученные результаты:• В результате был получен
чат-бот со всем заявленным
функционалом.
9
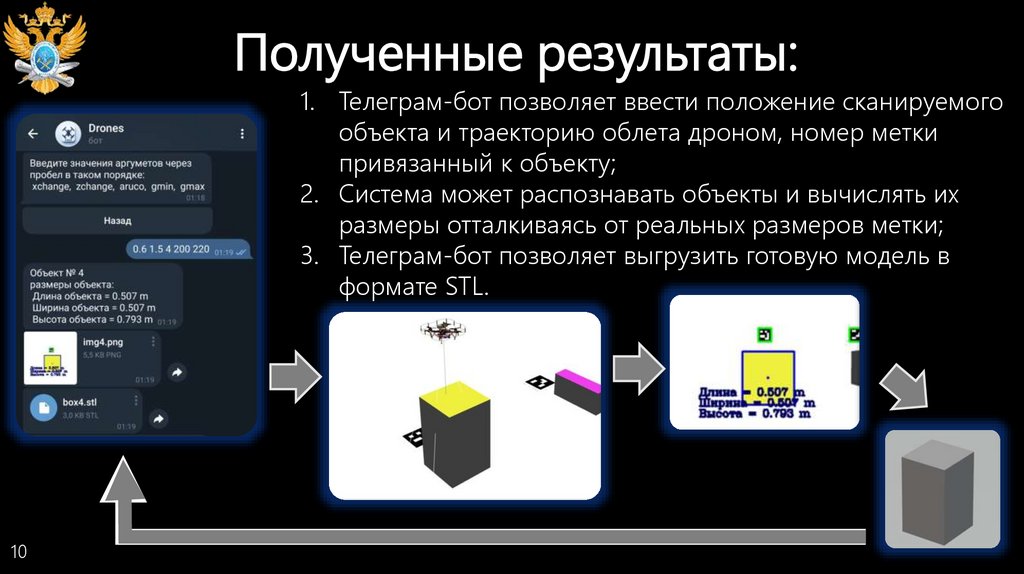
10.
Полученные результаты:1. Телеграм-бот позволяет ввести положение сканируемого
объекта и траекторию облета дроном, номер метки
привязанный к объекту;
2. Система может распознавать объекты и вычислять их
размеры отталкиваясь от реальных размеров метки;
3. Телеграм-бот позволяет выгрузить готовую модель в
формате STL.
10
11.
Дальнейшее развитие проекта:• Дальнейшие перспективы
развития – это унификация
алгоритма для различных
видов БПЛА.
• Внедрение функционала
создания 3D моделей в
базовый в библиотек clover,
которые являются
основными для COEX Клевер
4.
• Доработка функционал чатбота, либо переход к другим
видам протоколов обмена
данными типа «клиентсервер»
11
12.
Выводы:• В результате был получен
чат-бот со всем
заявленным
функционалом.
• Работа может быть
унифицирована и
масштабирована.
12
13.
Конец!13