






 Программирование
ПрограммированиеПохожие презентации:

")








Командная строка. ROS
1.
ROS2.
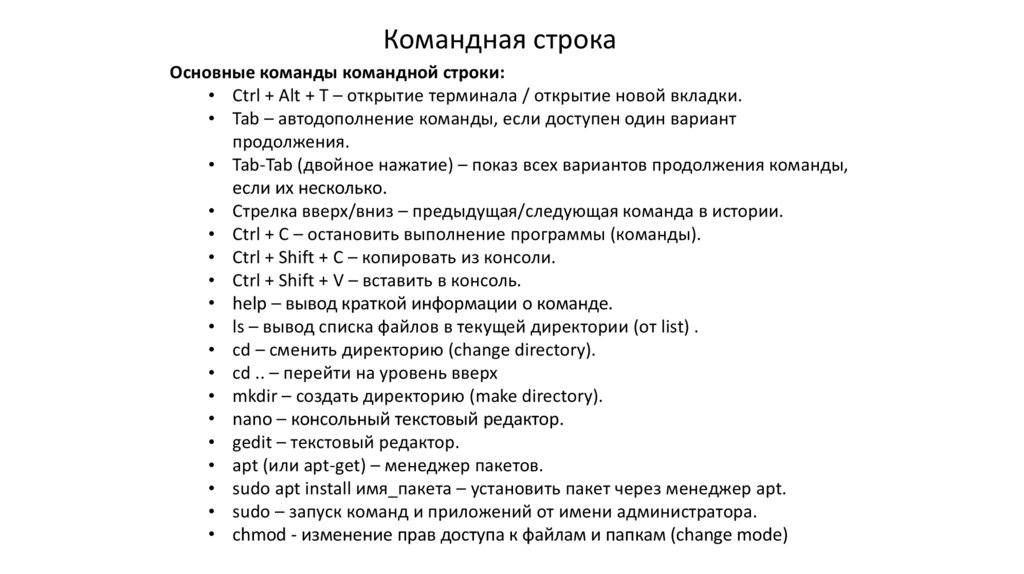
Командная строкаОсновные команды командной строки:
• Ctrl + Alt + T – открытие терминала / открытие новой вкладки.
• Tab – автодополнение команды, если доступен один вариант
продолжения.
• Tab-Tab (двойное нажатие) – показ всех вариантов продолжения команды,
если их несколько.
• Стрелка вверх/вниз – предыдущая/следующая команда в истории.
• Ctrl + C – остановить выполнение программы (команды).
• Ctrl + Shift + C – копировать из консоли.
• Ctrl + Shift + V – вставить в консоль.
• help – вывод краткой информации о команде.
• ls – вывод списка файлов в текущей директории (от list) .
• cd – сменить директорию (change directory).
• cd .. – перейти на уровень вверх
• mkdir – создать директорию (make directory).
• nano – консольный текстовый редактор.
• gedit – текстовый редактор.
• apt (или apt-get) – менеджер пакетов.
• sudo apt install имя_пакета – установить пакет через менеджер apt.
• sudo – запуск команд и приложений от имени администратора.
• chmod - изменение прав доступа к файлам и папкам (change mode)
3.
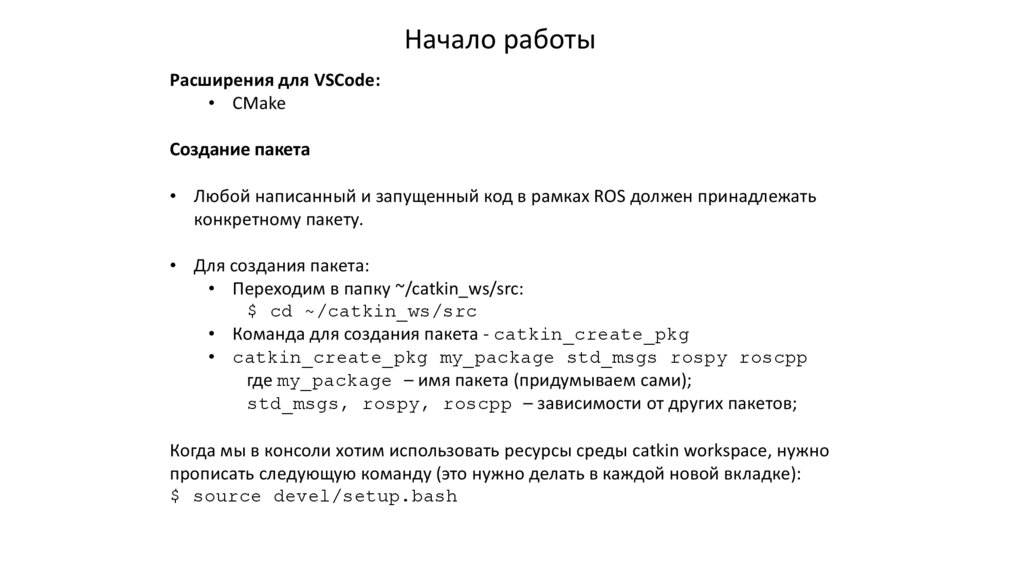
Начало работыРасширения для VSCode:
• CMake
Создание пакета
• Любой написанный и запущенный код в рамках ROS должен принадлежать
конкретному пакету.
• Для создания пакета:
• Переходим в папку ~/catkin_ws/src:
$ cd ~/catkin_ws/src
• Команда для создания пакета - catkin_create_pkg
• catkin_create_pkg my_package std_msgs rospy roscpp
где my_package – имя пакета (придумываем сами);
std_msgs, rospy, roscpp – зависимости от других пакетов;
Когда мы в консоли хотим использовать ресурсы среды catkin workspace, нужно
прописать следующую команду (это нужно делать в каждой новой вкладке):
$ source devel/setup.bash
4.
Начало работы5.
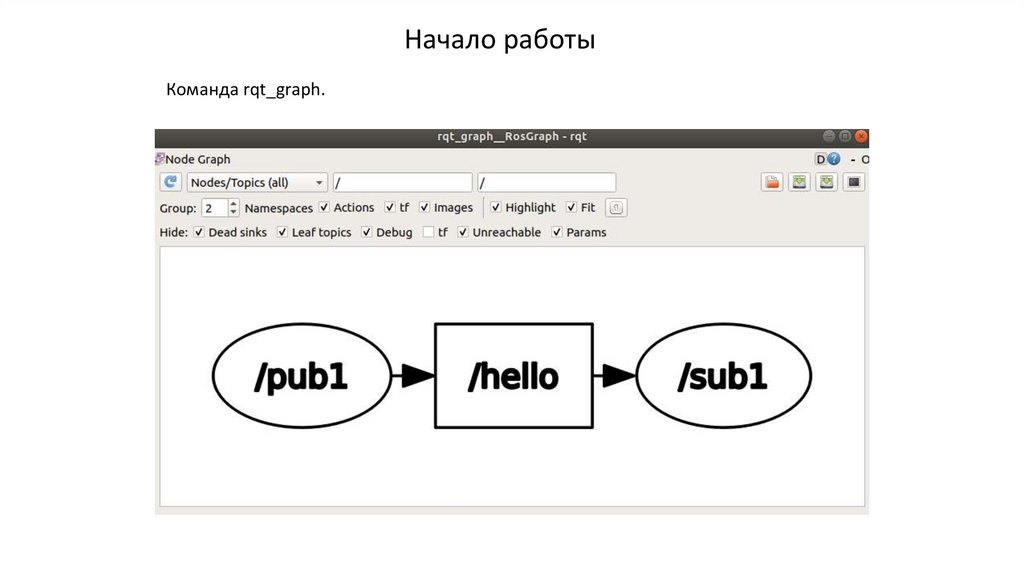
Начало работыКоманда rqt_graph.
6.
Начало работы. Lifehacks1. Для того, чтобы в каждой вкладке терминала не прописывать
$ source devel/setup.bash
нужно поправить файл bashrc. Для этого вводим команду:
$ gedit ~/.bashrc
Открывается файл, в нем в самый конец добавляем строку:
source ~/catkin_ws/devel/setup.bash
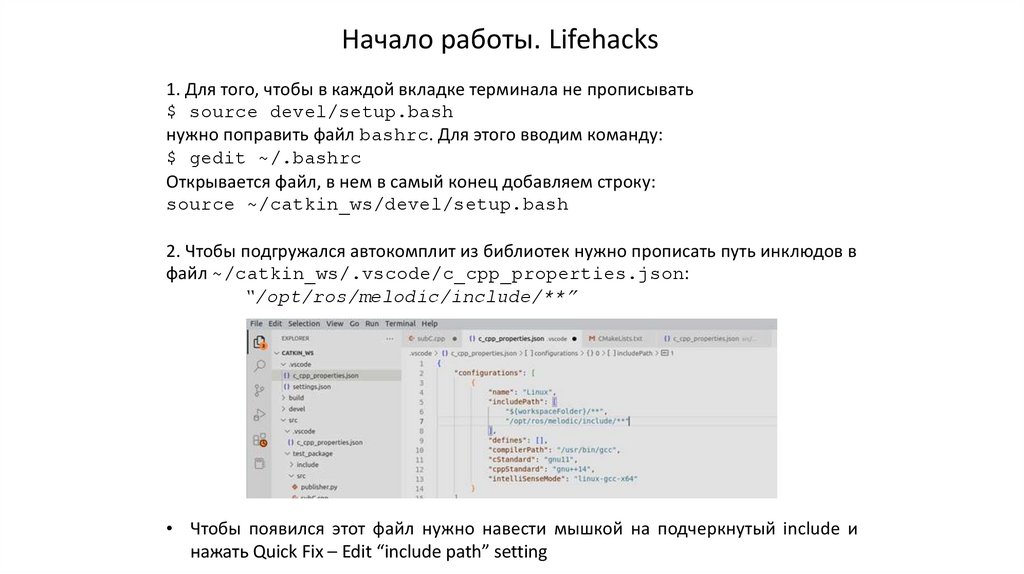
2. Чтобы подгружался автокомплит из библиотек нужно прописать путь инклюдов в
файл ~/catkin_ws/.vscode/c_cpp_properties.json:
“/opt/ros/melodic/include/**”
• Чтобы появился этот файл нужно навести мышкой на подчеркнутый include и
нажать Quick Fix – Edit “include path” setting
7.
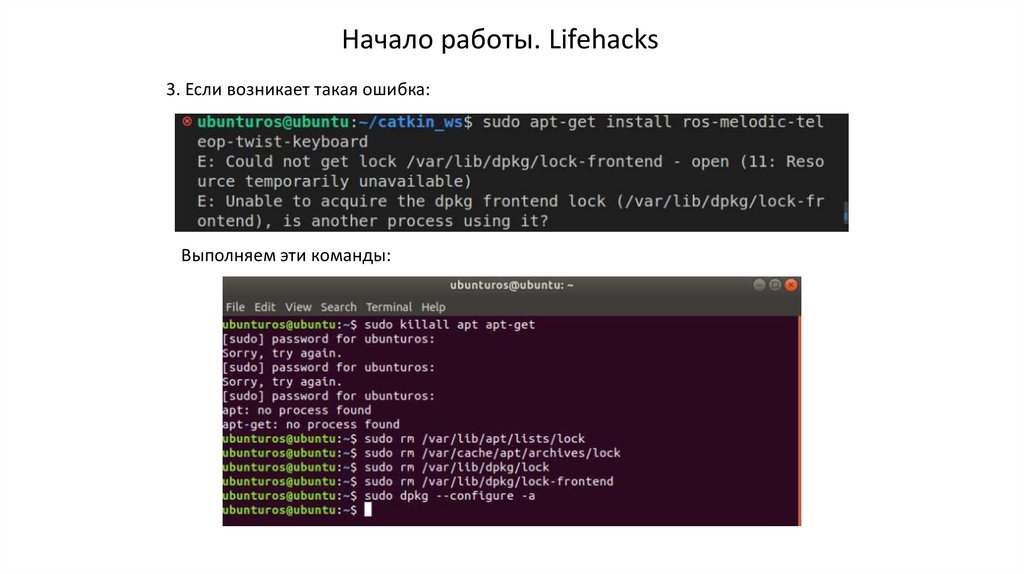
Начало работы. Lifehacks3. Если возникает такая ошибка:
Выполняем эти команды:
8.
Начало работыСоздание издателя на python: Создаем файл
my_publisher.py в папке src нашего пакета
• Делаем файл исполняемым:
$ chmod a+x src/my_publisher.py
• Запускаем (не забываем запускать
мастер-ноду – roscore):
• $ python3
/src/my_publisher.py
9.
Начало работыСоздание подписчика на python:
• Создаем файл my_listener.py в папке src
нашего пакета
• Делаем файл исполняемым:
$ chmod a+x
src/my_listener.py
• Запускаем (не забываем запускать
мастер-ноду – roscore):
• $ python3
/src/my_listener.py
• Кроме того не забудьте
“перестроить” рабочую
папку:
$ cd ~/catkin_ws
$ catkin_make
10.
Начало работыДля того чтобы посмотреть активные ноды:
rosnode list
Для того чтобы посмотреть активные топики:
rostopic list
Для просмотра подробной информации о топике:
rostopic info /(имя топика взятое из списка прошлой команды)
Для просмотра разновидностей сообщений библиотеки std_msgs:
rosmsg show std_msgs/
11.
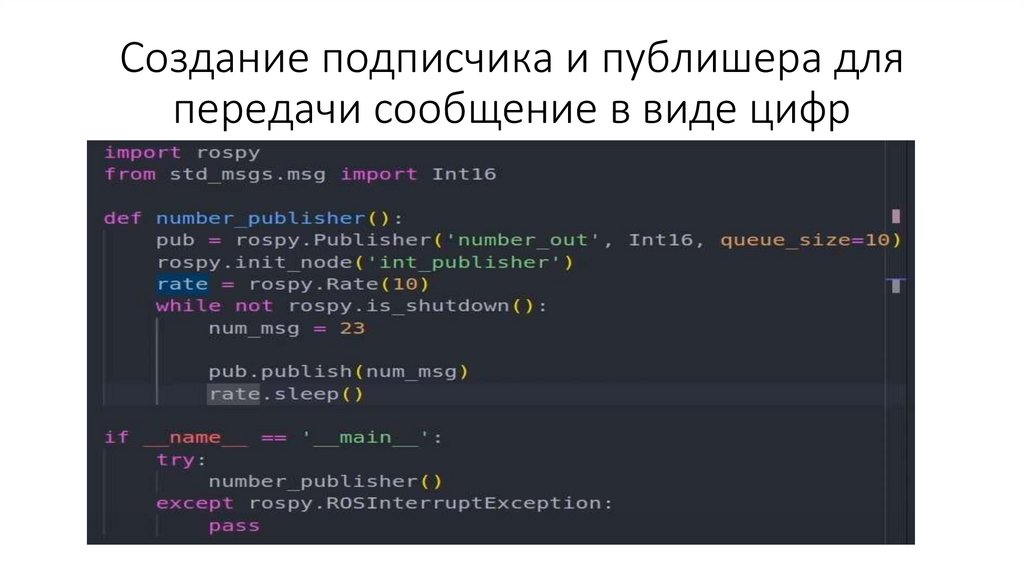
Создание подписчика и публишера дляпередачи сообщение в виде цифр
12.
Создание подписчика и публишера дляпередачи сообщение в виде цифр
13.
Замена на пользовательскую функцию сдействием