






















")

")

")





 Электроника
ЭлектроникаПохожие презентации:










Активные элементы радиоэлектронных устройств. Микроэлектромеханические системы (МЭМС), сенсорные устройства и датчики
1.
Санкт-Петербургский государственный университеттелекоммуникаций им. проф. М.А. Бонч-Бруевича
Кафедра Конструирования и производства
радиоэлектронных средств
Дисциплина: «Компоненты электронной техники»
Раздел 3: «Активные элементы
радиоэлектронных устройств»
Лекция №7. «Микроэлектромеханические
системы (МЭМС), сенсорные устройства и
датчики»
(2 часа)
Доцент кафедры, к.п.н.,
Мордовин В.Н.
2024 г.
2.
Учебные вопросы1. Определение, классификация, условно-графическое
обозначение микроэлектромеханических систем (МЕМС).
2. Способы изготовления МЭМС.
2.1. Объёмная микрообработка.
2.2. Поверхностная микрообработка.
2.3. Высокопрофильная микрообработка.
2.4. Другие виды микрообработки.
3. Применение МЭМС.
3.1. Датчики на основе МЭМС и их измерительные
свойства.
3.2. Микромеханические акселерометры (ММА).
3.3. Микромеханические гироскопы (ММГ).
3.4. Микромеханические датчики давления (ММДД).
3. Литература
1. Электрические и электронные компоненты устройств исистем : учеб.- Э45 ме-тод. пособие / В. В. Баранов [и
др.]. - Минск : БГУИР, 2019. -136 с. : ил.
2. Путеводитель по электронным компонентам: сборник/
Лев Шапиро. СПб.: Свое издательство, 2014. – 184с.
3. Свистова Т.В. Основы микроэлектроники: учеб.
Пособие [Электронный ресурс]. - Воронеж: ФГБОУ ВО
«Воронежский государственный технический университет», 2017.
3
4. ВВЕДЕНИЕ
На сегодняшний день одной из инновационных технологий являетсятехнология микроэлектромеханических систем - MEMS (MicroElectro Mechanical Systems).
Под технологией MEMS понимают технологию микрообработки,
позволяющую изготавливать кремниевые микросхемы с крошечными
механическими элементами – интеллектуальными машинами с
самыми различными функциями.
Физические размеры устройств в МЭМС варьируются от 1 микрона
до нескольких миллиметров. Они могут представлять собой
относительно простые структуры, практически не содержащие
движущихся элементов, а могут представлять собой очень сложные
электромеханические системы с большим числом подвижных элементов
и существенным количеством интегральной микроэлектроники.
Отличительной чертой всех МЭМС является то, что, по крайней
мере, один элемент в них подвижен. Датчики, изготовленные по
МЭМС-технологии, имеют широкую область использования в приборах:
смартфонах, бытовой технике, охранных системах, автомобильной
электронике и системах сигнализации, военной и космической техники,
системах навигации и т.д. Разработчики отдают предпочтение МЭМСпродукции за надежность и высокие технические характеристики.
4
5. 1. 1. Определение, классификация, условно-графическое обозначение МЕМС
1. 1. Определение, классификация, условнографическое обозначение МЕМСМикроэлектромеханические системы (МЭМС) – это
системы, включающие в себя взаимосвязанные
механические и электрические компоненты микронных
размеров.
С помощью соединения процессов производства
интегральной схем (чипа) и процессов микрообработки
получаются МЭМС.
Микроэлектромеханические системы состоят из
механических элементов, датчиков, электроники,
приводов
и
устройств
микроэлектроники,
расположенных на общей кремниевой подложке.
5
6. Структурная схема МЭМС с указанием структурных элементов
В качестве чувствительного элемента используется датчикМЭМС.
Операционный усилитель аналогового сигнала и аналогоцифровой преобразователь относятся к интегральным схемам.
Микроконтроллер осуществляет обработку цифрового сигнала.
6
7.
Для изготовления МЭМС применяются те же технологии, что идля изготовления традиционных интегральных микросхем,
дополняя последние механическими элементами, такими как
микробалки, шестерни, диафрагмы, пружины.
На основе МЭМС технологий было сделано большое
количество устройств, таких как сопла струйного принтера,
акселерометры, магнетометры, гироскопы, микромоторы и
микрозахваты, аттенюаторы, микрозеркала, устройства для
лаборатории-на-чипе (lab-on-chip), датчики давления и
расходомеры.
Изображение МЭМС-устройств, сделанное с помощью
электронного микроскопа: a) трехосевой акселерометр; б)
электростатический микродвигатель.
7
8. Классификация микроэлектромеханических системы в соответствии с областью их применения:
1. МЭМС для высокочастотной электроники (RFMEMS).2. Оптические МЭМС.
3. Биомедицинские МЭМС.
Достоинства МЭМС-устройств
1. Малые размеры, масса, объем;
2. Низкое энергопотребление;
3. Относительно низкая стоимость;
4. Простота интеграции в системы;
5. Малая тепловая инерционность;
6. Устойчивость к вибрации, ударам и радиации;
7. Возможность изготовления большого количества (партий);
8. Хорошая переносимость теплового расширения.
8
9.
Элементы МЭМС в реализации беспилотного КАМАЗаПространственное позиционирование автомобиля
осуществляется с использованием GPS-ГЛОНАСС систем связи.
9
10.
Квадрокоптер, оснащенный МЭМС устройствами длябеспилотного перемещения
Магистральным направлением применения МЭМС является создание
роботизированных систем и киборгов (робот-механизированное
устройство с машинным искусственным интеллектом; киборгбиологический организм с человеческим интеллектом, использующий
различные дополняющие или заменяющие устройства для расширения
функций жизнедеятельности организма).
10
11. 2. Способы изготовления МЭМС
Технологии изготовления устройств МЭМС базируются натехнологии этапов изготовления интегральных схем (ИС),
которые адаптированы для формирования трехмерных
структур.
В настоящее время выделяется три основных метода
микрообработки изготовления МЭМС устройства: объёмная,
поверхностная и высокопрофильная микрообработка.
2.1. Объёмная микрообработка
Объёмная микрообработка состоит в процессе удаления
материала подложки в целях формирования требуемой
структуры, которая включает в свой состав гибкие консоли или
кантилеверы, отверстия, канавки и мембранные элементы.
Чтобы сформировать закруглённые углубления, необходимо
удалять материал с помощью изотропного травления.
Кантиле́вер (англ. cantilever — кронштейн, консоль) — устоявшееся
название наиболее распространенной в сканирующей атомно-силовой
микроскопии конструкции микромеханического зонда.
11
12. Процесс объемной микрообработки
Кремниевый микрозахват (a) и ряд микробалок, полученных с помощьюобъемной микрообработки (b).
12
13. Особенности процесса объемной микрообработки
Параметры процессаПреимущества
1. Параметры плазмы:
Осмысленно
⎯ состав газа;
получаемое
⎯ напряжение смещения;
горизонтальное
⎯ температура подложки;
изображение
⎯ плотность плазмы;
⎯ давление процесса.
2. Маскирование полимерами и тонкими пленками:
Изменяемый
⎯ термическое SiO2;
профиль
⎯ химическое осаждение из паровой фазы при
пониженном давлении SiO2 или Si3N4;
⎯ нанесение фоторезиста;
⎯ металлизация (Cr, Al).
3. Химическое воздействие:
Возможно
⎯ с обратной стороны (мембраны, отверстия) получение
геометрическая форма определяется шаблоном маски; рельефных
⎯ с передней стороны (консоли, каналы, затворы) изображений
геометрическая форма определяется подтравливанием
Недостатки
Обработка пластин
по отдельности
Увеличение
времени травления
Нет собственного
ограничителя
травления
и
определения
изображения
4. Газы травителя:
SF6, CBrF3 при Т 270 К
SF6, O2 при Т100 К
CHF3, O2 при Т 100 К
CHCl3 при Т 270 К
13
14. 2.2. Поверхностная микрообработка
Поверхностная микрообработка состоит в последовательномосаждении на подложку структурных кремниевых слоёв и
«жертвенных» слоев, которые выполнены из диоксида кремния,
нитрида кремния или полимера. Методом фотолитографии в этих
структурных слоях формируют рисунок поперечного сечения
создаваемого узла. Далее, используя жидкость или сухое травление,
удаляют «жертвенный» слой, что приводит к образованию зазоров и
пустот между механическими элементами узла. Геометрические
параметры такого узла: толщина - 10-50 мкм, высота - 10-30 мкм.
Система зубчатой передачи (a) и подвешенный элемент тепловизионной
матрицы (b), которые получены с помощью поверхностной микрообработки.
14
15. Этапы поверхностной микрообработки при формировании МЭМС- устройств
1516.
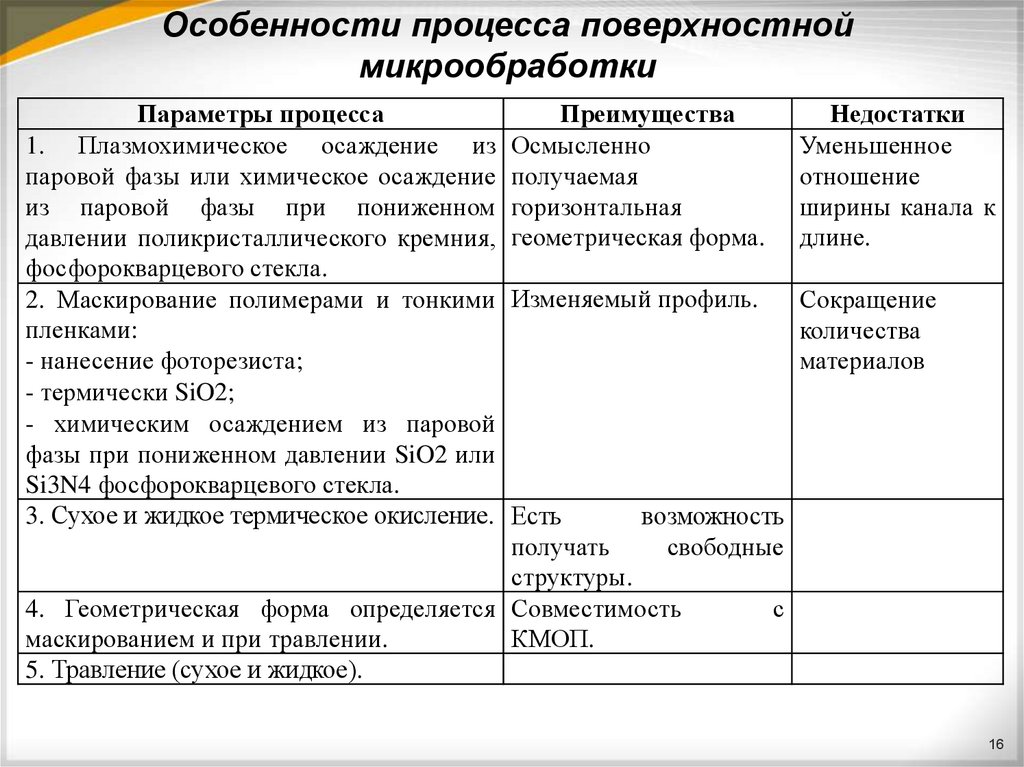
Особенности процесса поверхностноймикрообработки
Параметры процесса
Преимущества
Недостатки
1. Плазмохимическое осаждение из Осмысленно
Уменьшенное
паровой фазы или химическое осаждение получаемая
отношение
из паровой фазы при пониженном горизонтальная
ширины канала к
давлении поликристаллического кремния, геометрическая форма. длине.
фосфорокварцевого стекла.
2. Маскирование полимерами и тонкими Изменяемый профиль.
Сокращение
пленками:
количества
- нанесение фоторезиста;
материалов
- термически SiO2;
- химическим осаждением из паровой
фазы при пониженном давлении SiO2 или
Si3N4 фосфорокварцевого стекла.
3. Сухое и жидкое термическое окисление. Есть
возможность
получать
свободные
структуры.
4. Геометрическая форма определяется Совместимость
с
маскированием и при травлении.
КМОП.
5. Травление (сухое и жидкое).
16
17. 2.3. Высокопрофильная микрообработка
Цельювысокопрофильной
микрообработки
(LithographyGalvanik-Abformung – LIGA) является получение высокого
отношения высоты профиля к его ширине в трехмерной
структуре. Здесь применимы такие методы, как фото и
рентгенография, электроосаждение и формование.
С помощью рентгеновского излучения в толстом полимерном
слое фоторезисторов формируются канавки (до 5х10-3 м),
имеющие
отвесные
стенки.
Далее,
используя
метод
гальванического осаждения, формируют высокопрофильные
трехмерные структуры. Технология LIGA позволяет обеспечить
наилучшее соотношение высоты профиля к его ширине, а также
ширины канала к его длине, при условии обеспечения
минимальных размеров элементов.
Всего требуется от 5 до 25 операций рентгеновской
литографии в зависимости от сложности МЭМС устройства.
17
18. Процесс создания МЭМС-устройств по LIGA-технологии
Процесс создания МЭМС-устройств по LIGAтехнологии18
19. Особенности применения LIGA-технологии
Параметры процессаПреимущества
Недостатки
1. Рентгенолитография (синхротрон) в Имеет
наилучшее Ограничена возможности
полиметилметакрилате
отношение
ширины комбинирования
с
канала к длине при полупроводниковой
минимальных размерах
технологией (КМОП)
2. Гальваника
Структуры с высоким Есть
ограничения
на
разрешением
форму рельефа и на
топографического
получение
свободно
изображения
перемещаемых структур
3. Дочерняя и большая дочерняя копия Жесткий допуск
Ограничена точность по
из полиметров или металла
высоте
У технологии LIGA есть ещё ряд преимуществ:
⎯ можно формировать свободно перемещаемые
структуры;
⎯ возможность использования разнообразных
материалов.
К недостаткам технологии LIGA относятся:
⎯ повышенная сложность изготовления;
⎯ высокая стоимость маски и экспонирования.
19
20. 2.4. Другие виды микрообработки
1. SIGA-технология (ультрафиолетовая литография, гальваника иформовка). Она позволяет управлять шириной профиля структуры
МЭМС и хорошо совместима с технологией тонких пленок.
2. HART-технология (High aspect ratio technologies) (позволяет
реализовать высокое аспектное соотношение и дает возможность
получения структур МЭМС с высоким отношением высоты к ширине,
что позволяет создать узкие и глубокие канавки).
3.
MUMPS-технология
представляет
трехслойную
поликристаллическую поверхностную обработку.
4. Микростереолитография – технология формирования
изображения непосредственно в слое фоторезистора. На пластину
последовательно наносятся более 1000 слоев толщиной 1-5 мкм.
5. Микрообработка арсенида галлия. Специфические свойства
GaAs и AlGaAs позволяют применять к этим материалам методы
обработки, являющиеся развитием объёмной микрообработки.
20
21. 3. Применение МЭМС
Основные области применения МЭМС относятся к датчикам иисполнительным механизмам (актуаторам, актюаторам).
Датчики:
• микромеханические акселерометры (ММА), в том числе датчики
углового положения (чувствительный элемент (ЧЭ) – инерционная
масса);
• микромеханические датчики давления (ММДД) (ЧЭ – мембранные
элементы);
• микромеханические гироскопы (ММГ) (ЧЭ – вибрирующая масса).
Исполнительные механизмы (актуаторы):
• микродвигатели;
• микрозахваты;
• микрозеркала.
Актюаторы делятся на 5 групп:
• электростатические;
• магнитные;
• пьезоэлектрические;
• гидравлические;
• тепловые.
21
22. 3. Применение МЭМС
В широком смысле актюатором называется механизм,приводящий
в
движение
какой-либо
компонент
автоматизированной системы. Можно дать и более конкретное
определение. Это устройство на основе зубчато-винтовой
(червячной)
передачи,
преобразующее
вращение
ротора
электрического сервомотора в линейное перемещение штока.
Особенность аппарата состоит в том, что и электродвигатель, и
червяк, и шток собраны в единое изделие.
22
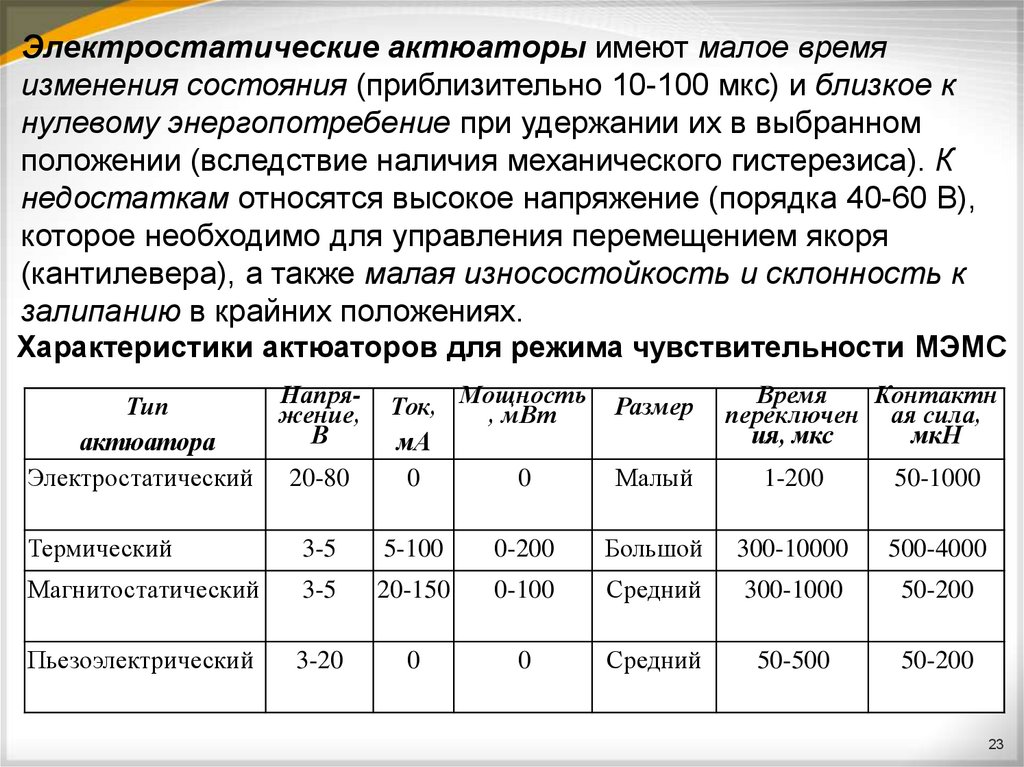
23.
Электростатические актюаторы имеют малое времяизменения состояния (приблизительно 10-100 мкс) и близкое к
нулевому энергопотребение при удержании их в выбранном
положении (вследствие наличия механического гистерезиса). К
недостаткам относятся высокое напряжение (порядка 40-60 В),
которое необходимо для управления перемещением якоря
(кантилевера), а также малая износостойкость и склонность к
залипанию в крайних положениях.
Характеристики актюаторов для режима чувствительности МЭМС
НапряТип
жение,
В
актюатора
Электростатический 20-80
Ток, Мощность
, мВт
мА
0
0
Размер
Время
Контактн
переключен ая сила,
ия, мкс
мкН
Малый
1-200
50-1000
Термический
3-5
5-100
0-200
Большой
300-10000
500-4000
Магнитостатический
3-5
20-150
0-100
Средний
300-1000
50-200
Пьезоэлектрический
3-20
0
0
Средний
50-500
50-200
23
24. 3.1. Датчики на основе МЭМС и их измерительные свойства
Измеряемой величиной, на базе которой формируется выходнойсигнал для микромеханического акселерометра (MMA),
является ускорение, для микромеханического датчика
давления (ММДД) - давление, для микромеханического
гироскопа (ММГ) - угловая скорость.
Существуют статические и динамические измерения. При
статическом
режиме
измерения
скорость
изменения
измеряемой величины более чем на порядок меньше скорости
собственных движений датчика. Если же эти скорости
сопоставимы, то режим называется динамическим. В
микродатчиках чаще присутствует статический режим
измерения.
Микродатчик с точки зрения теории измерений может
представляться измерительной цепью, которая содержит
чувствительный
элемент,
первичные
и
вторичные
преобразователи, а также электронные компоненты,
предназначенные
для
операций
преобразования
24
измерительного сигнала.
25.
Характеристики микродатчиковСтатическая характеристика отображает функциональную
связь между входной и выходной величинами. При линейной
функциональной
связи
коэффициент
прямой
пропорциональности между этими величинами называют
коэффициентом передачи (масштабным коэффициентом).
Чувствительность характеризует отношение приращения
выходного сигнала к приращению входного сигнала при условии
стремления входного сигнала к нулю. Иначе говоря, она
представляет собой производную от статической характеристики
по входному сигналу. Чувствительность также можно определить
по передаточной функции и через частотные характеристики.
Переходный процесс определяет полосу пропускания частот,
а также частотные искажения измеряемого сигнала. Он может
быть описан через дифференциальные уравнения цепи или
звена, а также через передаточную функцию, фазочастотную
характеристику (ФЧХ) или импульсную передаточную функцию.
25
26. Микромеханические датчики можно подразделить на:
• Микромеханические акселерометры (ММА) прямогопреобразования (осевые MMA и маятниковые MMA);
• ММА компенсационного преобразования (ММА с
электростатической обратной связью, ММА с
магнитоэлектрической обратной связью);
• Микродатчик давления прямого преобразования;
• ММДД компенсационного преобразования (ММДД с
электростатической обратной связью и ММДД с
магнитоэлектрической обратной связью);
• Микромеханические гироскопы ММГ прямого
преобразования (ММГ LR- и LL- типов; ММГ RR-типа).
26
27. 3.2. Микромеханические акселерометры (ММА)
ПреимуществаММА:
малые
массогабариты;
низкое
электропотребление; способность выполнять свои функции в
неблагоприятных условиях эксплуатации.
Используются во многих миниатюрных системах ориентации и
навигации для воздушных, наводных и подводных судов
различного назначения, в системах управления транспортными
средствами, в космической и военной техники и т.д.
ММА включают в свой состав инерционную массу (ИМ) и
упругие чувствительные элементы (ЧЭ). Выходной сигнал
ММА и сам принцип измерения данного вида микродатчика
обусловливается преобразованием параметров перемещения,
деформаций, сил в электрический сигнал.
ММА по виду движения классифицируют на осевые и
маятниковые, что определяется конструкцией их упругих
подвесов. Для осевых ММА конструкция обеспечивает
прямолинейный характер движения, а для маятниковых –
угловой. ММА маятникового вида также называют угловыми или
балочными.
27
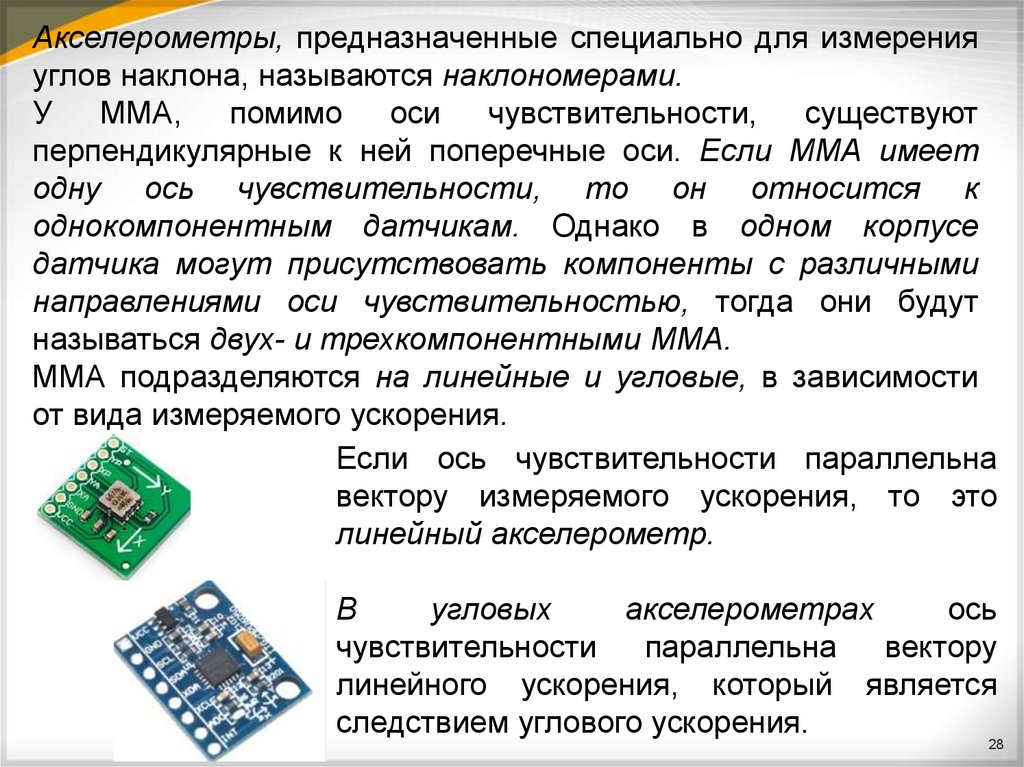
28.
Акселерометры, предназначенные специально для измеренияуглов наклона, называются наклономерами.
У
ММА,
помимо
оси
чувствительности,
существуют
перпендикулярные к ней поперечные оси. Если ММА имеет
одну ось чувствительности, то он относится к
однокомпонентным датчикам. Однако в одном корпусе
датчика могут присутствовать компоненты с различными
направлениями оси чувствительностью, тогда они будут
называться двух- и трехкомпонентными MMA.
ММА подразделяются на линейные и угловые, в зависимости
от вида измеряемого ускорения.
Если ось чувствительности параллельна
вектору измеряемого ускорения, то это
линейный акселерометр.
В
угловых
акселерометрах
ось
чувствительности
параллельна
вектору
линейного ускорения, который является
следствием углового ускорения.
28
29.
К основным характеристикам MMA относятся:• чувствительность,
• диапазон измерений;
• полоса пропускания частот;
• масштабный коэффициент;
• точность;
• быстродействие.
Существует ряд других дополнительных характеристик,
таких как плотность шумов, поперечная ошибка,
резонансные частоты, напряжение питания, потребляемый
ток и т.д.
Точность измерения ММА зависит от величины смещения
нуля, чувствительности (погрешность полной шкалы), а также
от дрейфа (температурного и временного) этих параметров.).
В идеале поперечная чувствительность должна равняться
нулю.
29
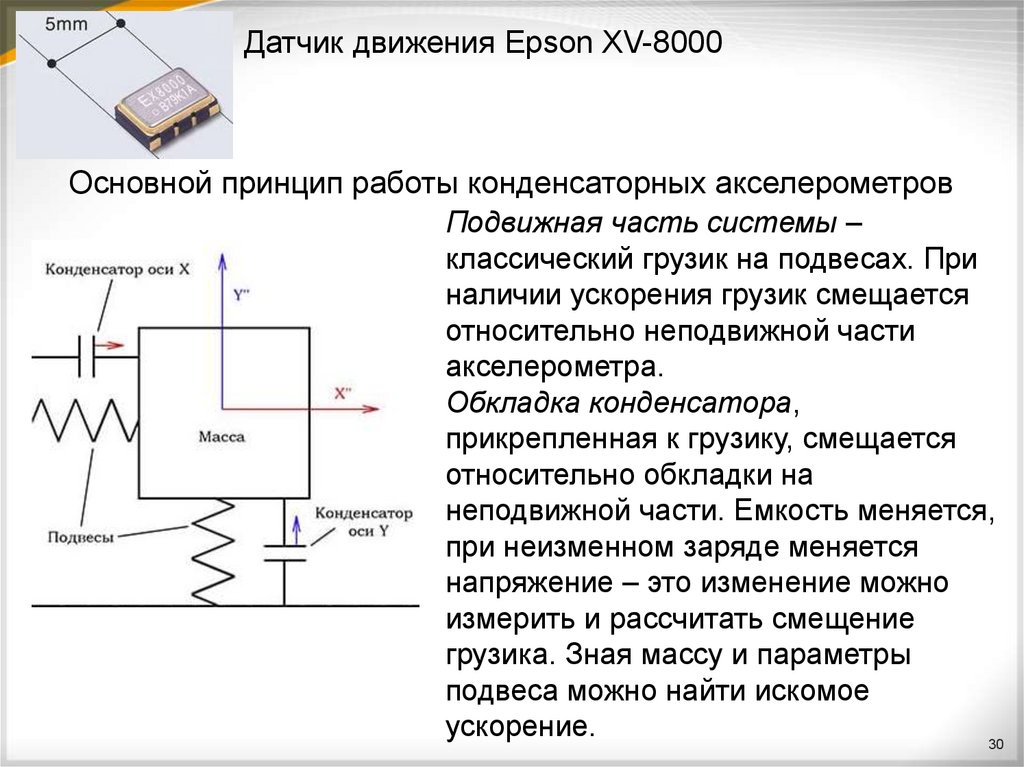
30.
Датчик движения Epson XV-8000Основной принцип работы конденсаторных акселерометров
Подвижная часть системы –
классический грузик на подвесах. При
наличии ускорения грузик смещается
относительно неподвижной части
акселерометра.
Обкладка конденсатора,
прикрепленная к грузику, смещается
относительно обкладки на
неподвижной части. Емкость меняется,
при неизменном заряде меняется
напряжение – это изменение можно
измерить и рассчитать смещение
грузика. Зная массу и параметры
подвеса можно найти искомое
ускорение.
30
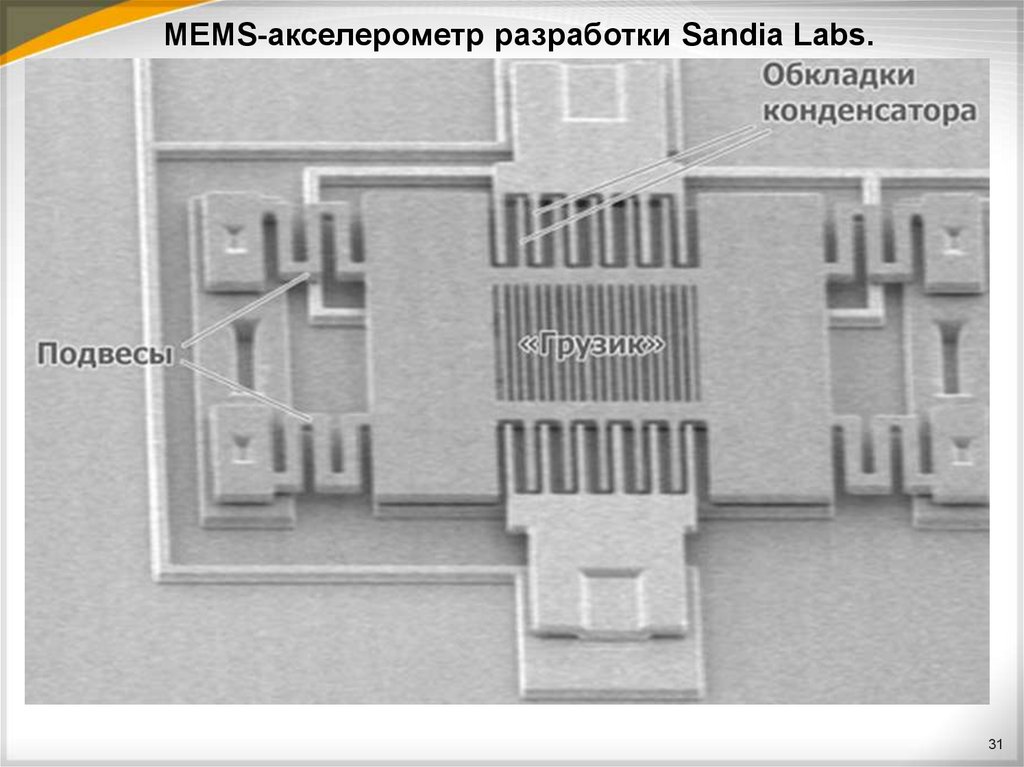
31.
MEMS-акселерометр разработки Sandia Labs.31
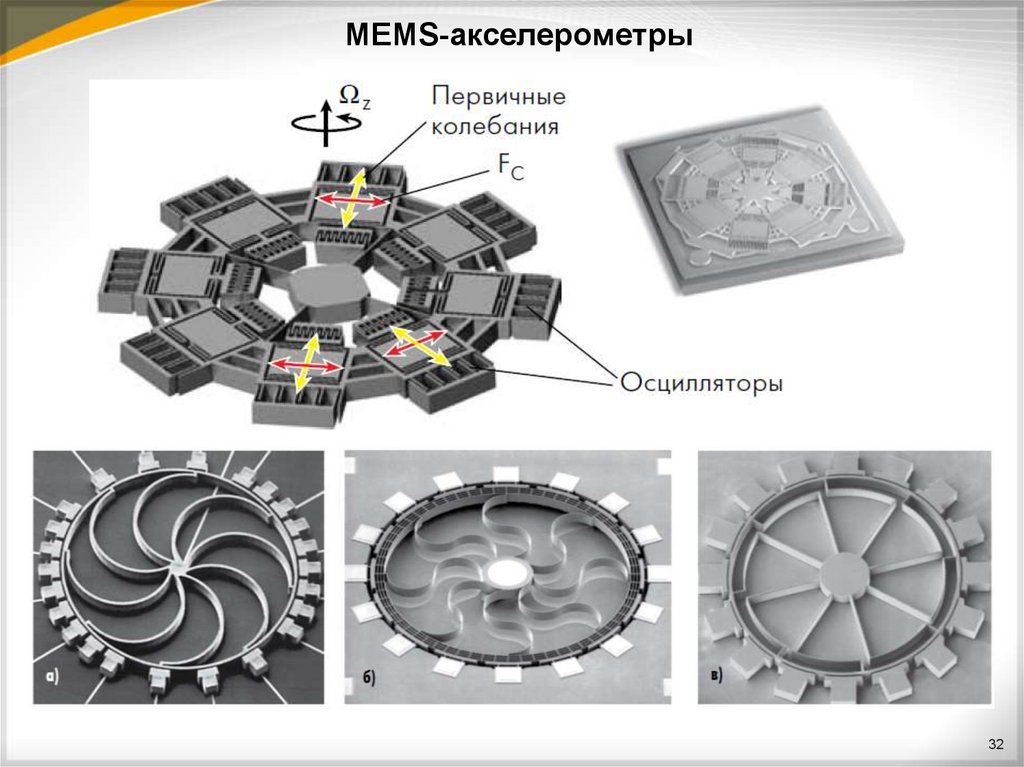
32.
MEMS-акселерометры32
33.
Основной принцип работы акселерометров напьезоэлементах
Вместо смещения обкладок конденсатора, в
акселерометрах основанные на
пьезоэффекте,происходит давление грузика на
пьезокристалл.
Под воздействием деформации пьезоэлемент
вырабатывает ток. Из значения напряжения,
зная параметры системы, можно найти силу, с
которой грузик давит на кристалл – и,
соответственно, рассчитать искомое ускорение.
Двухосный термальный акслерометр
MEMS-акселерометр – термальный датчик
ускорения. В качестве основного объекта
используется горячий пузырек воздуха. При
движении пузырек отклоняется от центра
системы, это отслеживается датчиками
температуры. Чем дальше сместился пузырек
– тем больше величина ускорения.
33
34. 3.3. Микромеханические гироскопы (ММГ)
Традиционно гироскопы находили применение в антеннах иоптических системах, в устройствах искусственного горизонта и
судовых успокоителях качки.
В настоящее время с развитием микроэлектронных технологий
стал возможным выпуск миниатюрных вибрационных
гироскопов, которые и назвали ММГ.
Современные MEMS-гироскопы устроены идентично
акселерометрам. Значения ускорений по осям пересчитываются
в значения углов поворота.
Гироскоп L3G4200D производства ST Microelectronics используется в
iPhone. Справа фотография с большим увеличением.
34
35. Принцип работы ММГ
Принцип работы ММГ заключается всоздании относительно корпуса
знакопеременного поступательного либо
вращательного движения
чувствительного элемента по одной из
степеней свободы и измерении
перемещений
по
другой
степени
свободы, возникающих под действием
кориолисовых сил или гироскопических
моментов при наличии переносной
угловой скорости корпуса.
Принцип работы ММГ с двухстепенным упругим
подвесом и поступательными перемещениями ЧЭ.
При наличии знакопеременной относительной линейной
скорости V вдоль оси ОХ и переносной измеряемой угловой
скорости Ω вокруг оси OZ появляются знакопеременное
ускорение Кориолиса Wк и соответствующая ему сила Fк
вдоль оси ОY.
35
36.
Основными элементами ММГ являются инерционная масса(ИМ), упругий элемент (УЭ) подвеса, элементы привода,
элементы, отвечающие за съем сигнала, и анкер.
ММГ характеризуются определённым набором
классификационных признаков.
1. Количество измерительных осей (однокомпонентный,
двухкомпонентный);
2. Количество инерционных масс (одномассовый,
многомассовый);
3. Тип подвеса (механический (наружный и внешний) и
неконтактный);
4. Наличие кинематических связей;
5. Вид перемещения инерционных масс;
6. Тип привода (обратные преобразователи);
7. Тип датчика съема сигнала (прямые преобразователи).
МЭМС гироскоп ЛК-МЭМС-ГИРО100.
36
37. 3.4. Микромеханические датчики давления (ММДД)
Конструкция ММДД включает в свой состав чувствительныйэлемент (ЧЭ), воспринимающие давление, и различные
преобразователи (перемещения, деформации и силы).
Эти элементы собраны в корпус, конструкция которого
представлена широким ассортиментом.
В качестве ЧЭ ММДД выступает тонкая, например кремниевая
пластинка (мембрана).
Основными техническими характеристиками ММДД
являются:
• рабочий диапазон измерений,
• чувствительность к измеряемому давлению,
• выходное напряжение.
По виду измеряемого давления ММДД делятся на 4 группы:
• абсолютные (измеряют абсолютное давление);
• дифференциальные (измеряют разность давлений);
• относительные (измеряют избыточное давление над
атмосферным давлением);
• вакуумные (измеряют степень разрежения).
37
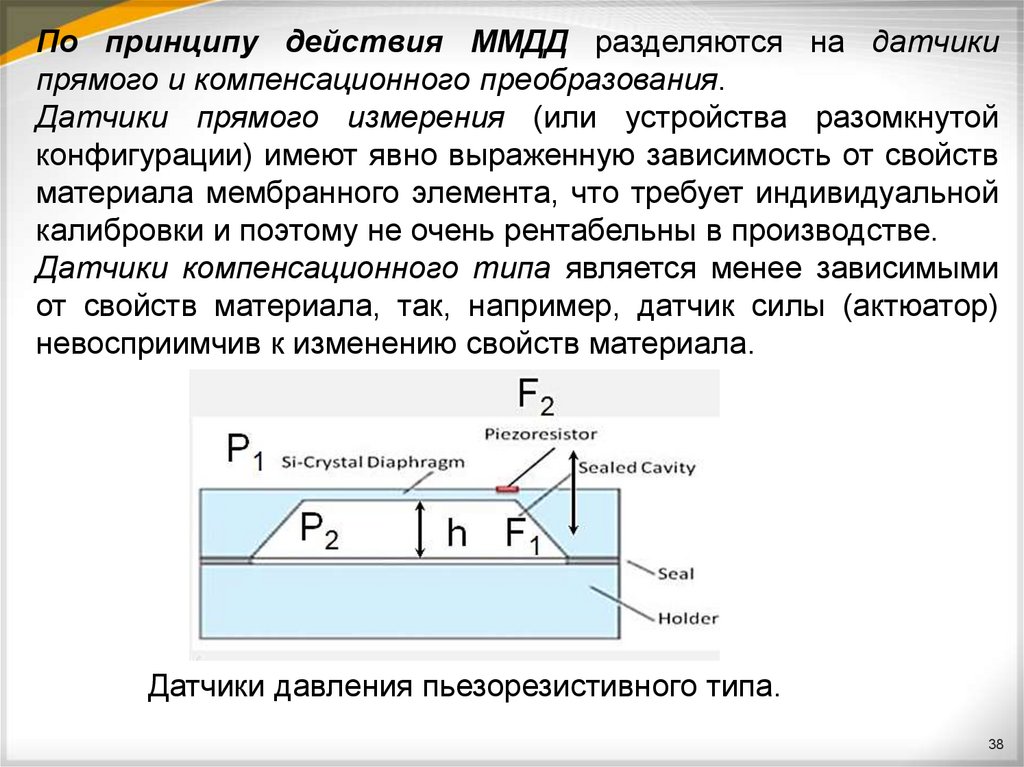
38.
По принципу действия ММДД разделяются на датчикипрямого и компенсационного преобразования.
Датчики прямого измерения (или устройства разомкнутой
конфигурации) имеют явно выраженную зависимость от свойств
материала мембранного элемента, что требует индивидуальной
калибровки и поэтому не очень рентабельны в производстве.
Датчики компенсационного типа является менее зависимыми
от свойств материала, так, например, датчик силы (актюатор)
невосприимчив к изменению свойств материала.
Датчики давления пьезорезистивного типа.
38
39. Датчики давления емкостного типа
Дляпреобразователей
перемещений
и
деформаций
мембранных элементов часто используют полупроводниковые
преобразователи (ПП). Однако они обладают недостатками,
которые существенно зависят от технологии их изготовления.
Так, в ПП мембранных элементах, исполненных по технологии
объемного кремния, из-за наличия p-n переходов ограничен
температурный диапазон использования ММДД (температурой
менее 100°С).
39
40. Микромеханические зеркала
Микромеханические зеркала включают в «начинку»многоканальных коммутаторов оптоволоконных сетей,
цифровых проекторов, телескопов и микроскопов. MEMSзеркала успешно работают в технологиях создания
пикопроекторов. Такие проекторы позволят
визуализировать собеседника при разговоре по телефону
или фото/видео, проецируя картинку со смартфона на
стену, одежду, лист бумаги. Однако существует проблема
создания эффективного источника света —
энергоэкономичного, но обеспечивающего высокую
яркость изображения.
40
41. Список сокращений
ИМ – инерционная массаИС – инерциальная система
КМОП - комплементарная структура металл-оксид-полупроводник
ММА – микромеханический акселерометр
ММГ – микромеханический гироскоп
ММДД – микромеханические датчики давления
ММП – микромеханические приборы
МОЭМС - микро-оптоэлектромеханические системы
МСТ – микросистемная техника
МЭМС – микроэлектромеханические системы
НиМЭМС – нано- и микроэлектромеханические приборы
РД – режим движения
РЧ – режим чувствительности
САПР – система автоматизированного проектирования
ФЧХ – фазово-частотная характеристика
ЧЭ – чувствительный элемент
УЭ – упругий элемент
41
42. Заключение
Рассмотрены технологические особенности реализации структур МЭМС,приведены методы анализа устройств МЭМС, в частности, описан
перспективный метод электромеханических аналогий. Описаны
различные типы систем автоматизированного проектирования, которые
базируются на использовании специализированного программного
обеспечения мировых лидеров в области разработки МЭМС.
Можно указать три основных пути миниатюризации электронной
аппаратуры.
1. Уменьшение числа функциональных элементов в схеме. Этот путь
может быть реализован за счет успехов схемотехники, однако
наилучший результат дает создание элементов или устройств с
функционально новыми свойствами.
2. Уменьшение габаритных размеров отдельных элементов при
сохранении их электрических параметров. Этого можно достигнуть, в
основном путем использования новых материалов и новых
технологических приемов изготовления материалов и элементов.
3. Уплотнение взаимного расположения элементов. Наибольшие успехи
достигнуты в этом направлении. Они связаны с использованием новых
материалов, технологических процессов и принципов конструирования.
42
43. Контрольные вопросы
1. Что понимают под технологией MEMS?2. Каковы физические размеры устройств в МЭМС?
3. Какие структурные элементы входят в МЭМС?
4. Как классифицируются МЭМС в соответствии с областью их
применения?
5. Перечислите основные методы микрообработки изготовления МЭМС
устройств?
6. Перечислите виды датчиков МЭМС?
7. На какие группы делятся актюаторы МЭМС?
9. Что содержит измерительная цепь микродатчика с точки зрения
теории измерений?
10. Как называются акселерометры, предназначенные специально для
измерения углов наклона?
11. Что отображает статическая характеристика микродатчика?
12. Что характеризует чувствительность микродатчика?
13. Микромеханические датчики можно подразделить на…?
14. Как ММА классифицируют по виду движения?
15. К основным характеристикам MMA относятся:…?
16. Какими классификационными признаками характеризуются ММГ?
17. На какие группы по виду измеряемого давления делятся ММДД?
43