



 Программное обеспечение
Программное обеспечениеПохожие презентации:




")





Бионический протез руки
1.
Бионическийпротез руки
Голубцов А.А.
Веселовский Д.С.
Воронин Р.А.
Данилевская Д.С.
2.
АктуальностьАктуальность проекта создания самодельного бионического протеза на базе Arduino обусловлена
потребностью в доступных и качественных протезах для людей с ограниченными возможностями.
Бионические протезы на основе Arduino могут быть более доступными и функциональными, чем
промышленные аналоги. Создание самодельных протезов может способствовать развитию
сообщества людей с ограниченными возможностями, а также стимулировать развитие в области
протезирования.
Цель
Цель - разработать конструкцию протеза, позволяющего эффективно заменить
утраченную конечность и обеспечить функциональность кисти и предплечья.
сконструировать и создать готовое, конкурентно способное изделие.
3.
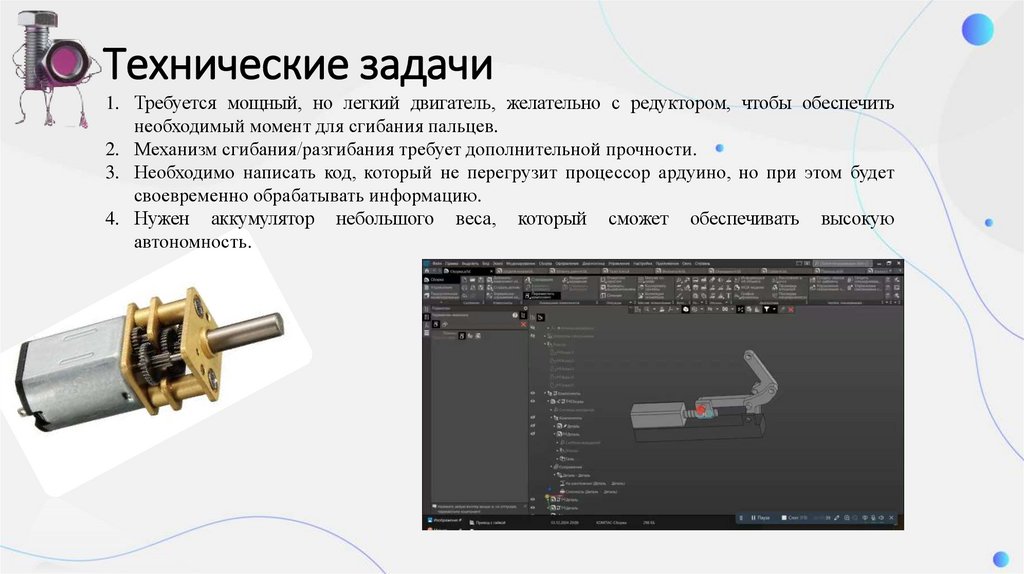
Технические задачи1. Требуется мощный, но легкий двигатель, желательно с редуктором, чтобы обеспечить
необходимый момент для сгибания пальцев.
2. Механизм сгибания/разгибания требует дополнительной прочности.
3. Необходимо написать код, который не перегрузит процессор ардуино, но при этом будет
своевременно обрабатывать информацию.
4. Нужен аккумулятор небольшого веса, который сможет обеспечивать высокую
автономность.
4.
Описание конструкции протезаПротез состоит из двух основных частей: кисти и предплечья. Кисть включает в себя пальцы, которые
обеспечивают захват предметов и выполнение различных действий. Предплечье служит для соединения кисти
с плечом и обеспечивает подвижность всей конструкции.
Так же в протезе присутствует двигатель, приводящий в движение механизм сгибания пальцев, плата
управления, аккумуляторная батарея, датчики сигнала мышц.
5.
Программная частьEMG датчик считывает высокочастотные электронные импульсы, которые управляют мышцам человека. Усиленный
сигнал в виде высокочастотных колебаний поступает в плату управления. Наш код использует фильтр среднего
значения, а также с помощью модуля конвертирует отрицательный сигнал.
На выходе мы получили колебания низкой частоты, значения которых легко обрабатываются. Анализируя график,
легко определить, когда сжимается предплечевая мышца (область резкого возрастания амплитуды), именно в этот
момент двигатель приводит в движения пальцы.
Сигнал до фильтрации
Сигнал после фильтрации
6.
Экономическая частьПромежуточный результат себестоимости
Стоимость всех деталей:
1.Печать на 3Д принтере всех деталей ≈ 600р
2.Двигатель ≈ 200р
3.Плата ардуино ≈ 1500р
4.Усилитель сигнала AD620 ≈ 400р
5.Драйвер двигателя ≈ 300р
6.АКБ ≈ 1000р
7.Прочие материалы ≈ 500р
ИТОГО ≈ 4500р
Данная себестоимость в разы меньше аналогичных протезов.
7.
ЗаключениеСоздавая свое устройство, было проведено огромное количество экспериментов, для подбора лучших
компонентов. Много раз менялась электроника и механическая часть.
Данный проект позволил создать протез руки, который обладает высокой степенью функциональности, а также
может быть адаптирован под индивидуальные особенности пользователя.
Использование 3D принтеров и современных материалов позволит значительно снизить стоимость протеза по
сравнению с коммерческими аналогами. Несмотря на то, что проект еще требует некоторых доработок, таких как
улучшение стабильности сигнала, снижение веса и увеличение продолжительности работы от батареи, уже сейчас
он представляет собой значительный шаг вперед в области бионики и протезирования.
В будущем планирую продолжать исследования и разработку бионических протезов на Ардуино с целью
повышения их эффективности, удобства использования и доступности для широкого круга пользователей.
Спасибо за внимание