 Информатика
ИнформатикаПохожие презентации:










Базовые набор команд для TurtleBro
1.
Базовые набор команддля TurtleBro
2.
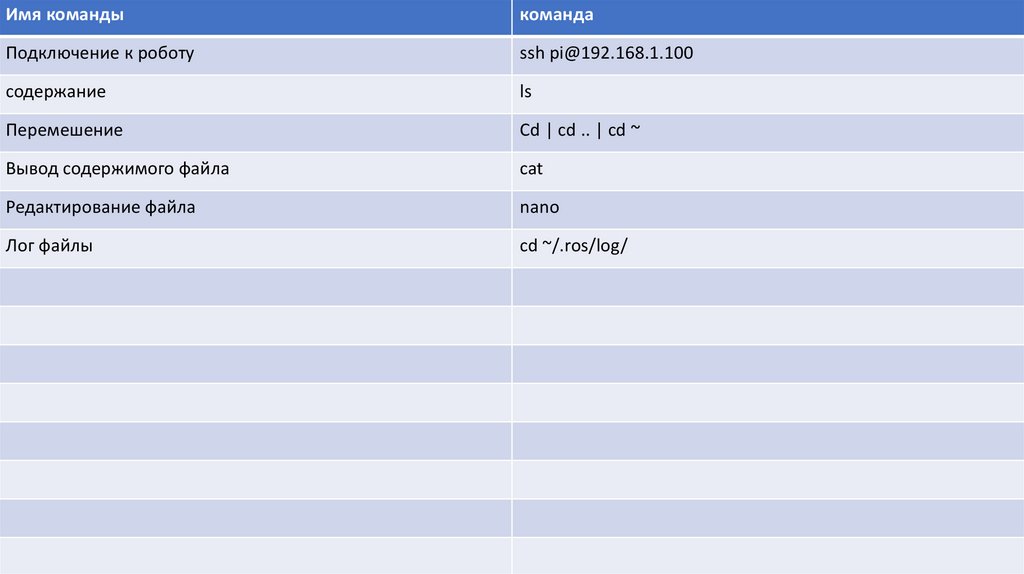
Имя командыкоманда
Подключение к роботу
ssh pi@192.168.1.100
содержание
ls
Перемешение
Cd | cd .. | cd ~
Вывод содержимого файла
cat
Редактирование файла
nano
Лог файлы
cd ~/.ros/log/
3.
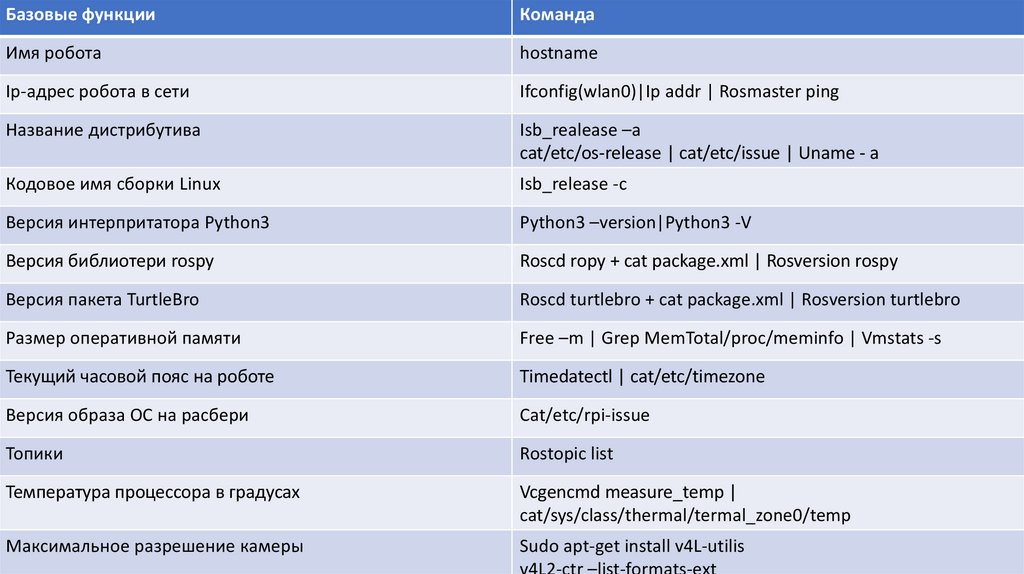
Базовые функцииКоманда
Имя робота
hostname
Ip-адрес робота в сети
Ifconfig(wlan0)|Ip addr | Rosmaster ping
Название дистрибутива
Isb_realease –a
cat/etc/os-release | cat/etc/issue | Uname - a
Кодовое имя сборки Linux
Isb_release -c
Версия интерпритатора Python3
Python3 –version|Python3 -V
Версия библиотери rospy
Roscd ropy + cat package.xml | Rosversion rospy
Версия пакета TurtleBro
Roscd turtlebro + cat package.xml | Rosversion turtlebro
Размер оперативной памяти
Free –m | Grep MemTotal/proc/meminfo | Vmstats -s
Текущий часовой пояс на роботе
Timedatectl | cat/etc/timezone
Версия образа OC на расбери
Cat/etc/rpi-issue
Топики
Rostopic list
Температура процессора в градусах
Vcgencmd measure_temp |
cat/sys/class/thermal/termal_zone0/temp
Максимальное разрешение камеры
Sudo apt-get install v4L-utilis
v4L2-ctr –list-formats-ext
4.
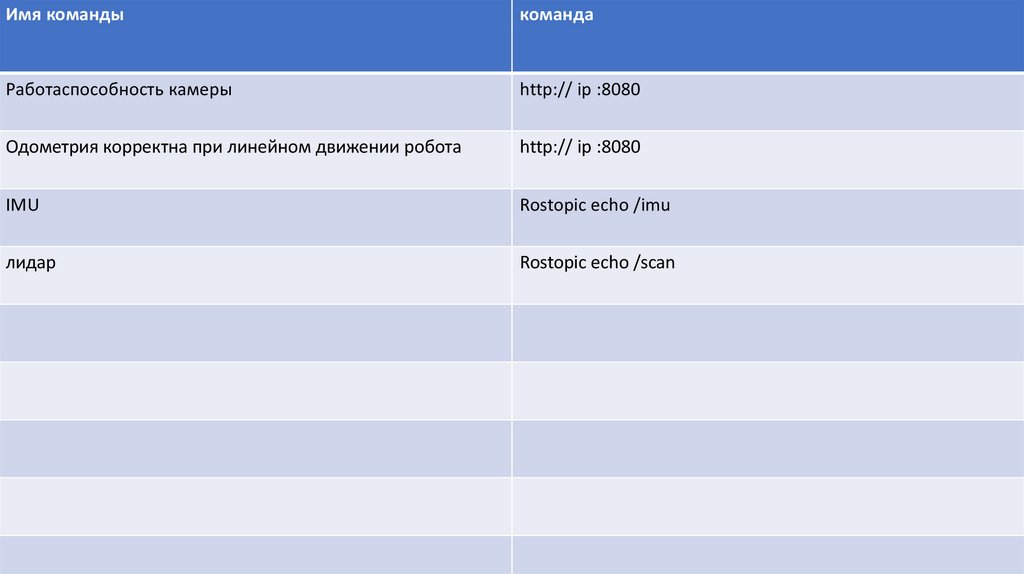
Имя командыкоманда
Работаспособность камеры
http:// ip :8080
Одометрия корректна при линейном движении робота
http:// ip :8080
IMU
Rostopic echo /imu
лидар
Rostopic echo /scan