



")













")
")










")
 Активные преобразователи")
 Примеры. Активные преобразователи")
 Параметрические датчики")
 Примеры. Параметрические датчики")
")
")









")








 Электроника
ЭлектроникаПохожие презентации:



")
")





Виды программно-аппаратных комплексов и область применения
1. Программно-аппаратные комплексы
Тема 1: Виды ПАК и область примененияПлан изложения
Основные понятия. Виды ПАК и области их применения.
2. Программно-аппаратные комплексы. Введение
Определение:Программно-аппаратный комплекс – это набор технических и
программных средств, работающих совместно для
выполнения одной или нескольких однородных задач.
Термин широко применяется в России с аббревиатурой ПАК,
наряду с ПТК (программно-технический комплекс) как синоним.
Состоит, соответственно, из двух основных частей:
•Аппаратная часть (англ. hardware) — устройство сбора и
обработки информации например компьютер, плата
видеозахвата, биометрический детектор, калибратор и т. п.
•Программная часть (англ. software) — специализированное
программное обеспечение, обрабатывающее и
интерпретирующее данные, собранные аппаратной частью.
Позволяют развертывать определенные системы без привлечения
квалифицированного персонала.
Это помогает существенно снизить расходы на внедрение определенных
элементов инфраструктуры.
3.
Информационнаябезопасность
Информационная
поддержка
Анализ данных
Робототехника
Управление
проектами
4. Виды ПАК и область применения
PLC (Programmable Logic Controller). “программируемый логический
контроллер”
(ПЛК)
- аппаратный
Типовые
задачи
систем
PLC: модуль для реализации алгоритмов
автоматизированного
управления. Уровень диспетчерского (операторского)
Применяются
•Управление
конвейерными
производствами;
управления развит слабо и сводится,
как правило, к установке кнопочного
•скважины
(нефтяные,
газовые,
нагнетательные
водозаборные)
и
•Управление
робототехникой;
пульта управления или ЖК-панели для запуска/останова
тогои или
иного
технологического
участка
и отображения
аварийных сигнализаций.
установки
для измерения
ихустройствами;
производительности;
•Управление
позиционирующими
Автоматизированная
система
управления
технологическим процессом
•блоки дозирования
химреагентов;
•Высокоскоростное
управление
приводами;
(АСУ ТП)
— группа
решений
техническихв иразных
программных
средств,
Сегодня
АСУ
ТП
применяют
сферах:
•дожимные
и
кустовые
насосные
станции;
•Сигнализация,
(автоматизированные
линии, пульты
предназначенныхоповещение
для автоматизации
управления технологическим
в
энергетике;
оборудованием
на подготовки
промышленных
предприятиях.
Понятие машины и т.д.)
•установки
нефти;
охранной
сигнализации,
кнопочные
замки, стиральные
«автоматизированный»,
в отличие от понятия «автоматический», подчёркивает
на производстве;
•газокомпрессорные
станции;
необходимость
участия человека
в отдельных операциях, как в целях
на
инфраструктурных
объектах;
сохранения
над процессом,
так и в связи со
сложностью или
•сети контроля
нефтегазосборных
трубопроводов
и водоводов;
нецелесообразностью
отдельных
операций.
в медицине; автоматизации
•технологические
установки по
переработке
углеводородного сырья;
Составными
частями
АСУ
ТП
могут
быть
отдельные
системы
автоматического
в офисных
зданиях;
•станции
смешения
бензинов
и
дизельных
топлив;
управления (САУ) и автоматизированные устройства, связанные в единый
в области
•товарно-сырьевые
комплекс.
Такие кактелекоммуникаций;
системыпарки;
диспетчерского управления и сбора данных
(SCADA).
в сфере
ЖКХ готовой
и др. продукции в железнодорожный, водный и
•узлы
отгрузки
SCADA (Supervisory Control and Data Acquisition) “система телемеханики”,
автотранспорт;
“система
телеметрии” или “ система диспетчерского управления”- программный
•системы энергообеспечения,
включая трансформаторные
пакет визуализации
технологического процесса.
Для большинства
ТП характерна трехуровневая
модель построения.
подстанцииАСУ
и распределительные
устройства;
Распределённая
система
управления, производства
РСУ (Distributedэлектроэнергии;
Control System,
•генерирующее
оборудование
DCS) — система управления непрерывными технологическими процессами,
•сети
транспорта
и днями
распределения
электрической
тепловой
энергии
которые
должны
проходить
и ночами, месяцами
и даже игодами,
при этом
останов процесса, даже кратковременный, недопустим. Для большинства РСУ
характерна трехуровневая модель построения.
5. Трёхуровневая архитектура АСУ ТП (Самый низкий уровень в пирамиде управления предприятием)
Нижний уровень - уровень ввода/вывода (IOLayer), включает полевые приборы (датчики,
сенсоры, исполнительные механизмы), которые
с помощью электрических кабелей
подключаются к подсистеме полевого
ввода/вывода (IO subsystem).
Физический/технический процесс
Уровень ввода/вывода
Полевая
шина
Средний уровень – это уровень контроллеров
(CPU). Их задача – обрабатывать поступающую
из подсистемы ввода/вывода информацию и
выдавать обратно управляющее воздействие.
Верхний уровень – это уровень
операторского управления,
объединяющий серверы и
операторские рабочие станции.
Сервер дает возможность
распределять данные между многими
компьютерами и другими серверами
так, чтобы отдельные пользователи и
коллективы могли выдавать любое
количество запросов.
Исполнительные
механизмы
Датчики
Согласование
входных/
выходных
сигналов
Модули ввода/вывода
Программируемые логические контроллеры
Промышленная
сеть
Выходной
интерфейс
компьютера
Прокси-сервер
Серверы
Контроллер
домена
Клиентские ПК АРМ
оператора
Входной
интерфейс
компьютера
Сервер баз данных
6. Структурная схема распределенной СУ
Задача синхронизацииуправления выполняется
компьютерами
среднего звена АСУ.
В распределенных
системах каждый ПЛК
решает локальную задачу.
7. Системный подход к проектированию ПАК
- техническое решение концепции алгоритма работысложной системы, управление которой основано на
общесистемных принципах.
параметры х1, х2, ..., хn
вспомогательные параметры y1, y2,... Yi
возмущающие воздействия f1, f2,... Fi
предписанные значения g1, g2,..., gk
управляющие воздействия E1, E2,…, Em
8. Программно-аппаратные комплексы
Тема 2Технические основы ПАК.
Обработка сигналов. Датчики
ПАК неразрывно связано с переработкой потока технологической информации.
Материальным носителем информации является сигнал, который помимо информации
несет также некоторою энергию, полученную от источника информации. Эта энергия
воздействует на приемник. Сигнал носителей внешней (априорной и исходной)
информации должен передавать сведения о задачах и целях управления. Сигналы
текущей информации, вырабатываемые датчиками должны обеспечивать необходимую
простоту и высокую достоверность преобразования технологического параметра в
сигнал.
Поэтому специалист по автоматизации должен знать общие принципы получения и
преобразования технологической информации, передачи информации и защиты ее от
помех.
9.
План изложенияСигналы
1.
2.
Понятие сигнала. Виды и форма сигналов
Параметры, влияющие на качество передачи сигналов
1) Искажение спектра сигнала линиями связи
2) Входной и выходной импеданс датчиков
3) Электрические помехи и их влияние на передаваемый сигнал
Датчики
1. Понятие датчика. Состав.
2. Классификация датчиков по виду выходного сигнала
3. Классификация датчиков по принципу действия
4. Классификация датчиков по природе измеряемой величины
5. Сигналы и стандарты датчиков
6. Достоверность исходных данных и аварийные сигналы датчиков
7. Статическая и динамическая характеристики датчика
10. Виды и форма сигналов
Сигнал – это материальный носитель информации.
В соответствие с классификацией сигналы делятся на две группы:
аналоговые или непрерывные, способные в определенном диапазоне
находиться в бесконечно большом количестве состояний;
дискретные, способные в определенном интервале находиться в конечном
числе состояний (ток в цепи, коммутируемой реле; выходной сигнал логического
элемента и т.д.)
11. ПАРАМЕТРЫ, ВЛИЯЮЩИЕ НА КАЧЕСТВО ПЕРЕДАЧИ СИГНАЛА
Сигналтехнологического
параметр
Сигнал, поступающий с
датчика в МК
ГОСТ 12997-84 Изделия ГСП
Общие технические условия
1)Степень искажения сигналов линиями связи
Любая периодическая функция f(t) с
периодом Т, может быть представлена с
помощью тригонометрического ряда Фурье.
То есть любой периодический процесс можно
представить в виде суммы синусоидальных
колебаний различных частот и различных
амплитуд.
Сигналы, которые вырабатываются датчиками,
должны быть совместимы с приёмником сигнала
по частоте. Искажение передающим каналом
синусоиды какой-либо частоты приводит в
конечном счете к искажению передаваемого
сигнала любой формы, особенно если синусоиды
различных частот искажаются неодинаково.
2) Входной и выходной импеданс датчиков
должны быть согласованы с устройствами
измерения
3) Возмущения и шум – искажения
измерительного сигнала в процессе
формирования и передачи.
Кроме искажений сигналов, вносимых
внутренними физическими параметрами линии
связи, существуют и внешние помехи, которые
вносят свой вклад в искажение формы сигналов
на выходе линии.
12. ГОСТ Р 52931-2008 Приборы контроля и регулирования технологических процессов
1)Необходимо знать по каким характеристикам можно оценитьстепень искажения сигналов линиями связи и какими способами
можно пропускания
устранить такие
искажения.
Полоса
определяет
диапазон частот синусоидального сигнала,
Одним
из важнейших
показателей
связисвязи
является
её комплексный
при
которых
этот сигнал
передаетсялинии
по линии
без значительных
коэффициент передачи
искажений
Полоса пропускания – диапазон частот, в пределах которого АЧХ (в дБ)
остается меньше заданного значения (0,707 от максимального)
К - модуль коэффициента усиления усилителя (АЧХ)
определяется
относительное
уменьшение
амплитуды
или
φ Затухание
- разность начальных
фазкак
сигнала
проходящего
через усилитель
(ФЧХ).
мощности
сигнала при
передаче
по линии
сигнала
определенной
частоты.
Степень
искажения
сигналов
линиями
связи
оценивается
с помощью
таких
Затухание α измеряется
в децибелах (дБ,
decibel - dB) иАЧХ,
вычисляется
по
характеристик,
как амплитудно-частотная
характеристика
фазо-частотная
следующей формуле:
характеристика
ФЧХ, полоса пропускания и затухание на определенной
α = 10 log
/Рвх,
10 Рвых
частоте,
спектр
сигнала.
где Рвых - мощность сигнала на выходе линии, Рвх - мощность сигнала на
Амплитудно-частотная
характеристика показывает, как затухает
входе линии.
амплитуда
синусоиды
на выходе
линии
связи без
по сравнению
с амплитудой
на
Так как мощность
выходного
сигнала
кабеля
промежуточных
усилителей
ее
входеменьше,
для всех
возможных
передаваемого
сигналакабеля
(сложность
всегда
чем
мощностьчастот
входного
сигнала, затухание
всегда
измерения
!).
является отрицательной
величиной.
13. ГОСТ Р 52931-2008 Приборы контроля и регулирования технологических процессов
ПАРАМЕТРЫ, ВЛИЯЮЩИЕ НА КАЧЕСТВО ПЕРЕДАЧИ СИГНАЛАСигналы описываются через их спектр. Подобным образом сети или
каналы связи описываются через их спектральные характеристики
или частотные передаточные функции.
Спектром временной зависимости (функции) f(t) называется совокупность
ее гармонических составляющих, образующих ряд Фурье. Спектр можно
характеризовать некоторой зависимостью Аk (спектр амплитуд)
и φ k (спектр фаз) от частоты ω k = kω1.
Спектральная плотность S(ω)
позволяет судить о частотных
свойствах случайного процесса.
Она характеризует его
интенсивность на различных
частотах или, иначе, среднюю
мощность, приходящуюся на
единицу полосы частот.
14. ГОСТ Р 52931-2008 Приборы контроля и регулирования технологических процессов
Соответствие междуполосой пропускания
линии связи и спектром
сигнала
Если значимые гармоники сигнала (то есть те гармоники, амплитуды которых
вносят основной вклад в результирующий сигнал) попадают в полосу
пропускания линии, то такой сигнал будет хорошо передаваться данной
линией связи и приемник сможет правильно распознать информацию,
отправленную по линии передатчиком
15. ГОСТ Р 52931-2008 Приборы контроля и регулирования технологических процессов
Анализ спектра сигнала позволяет сделать вывод о частоте опросадатчика
Воспользовавшись
преобразованием
Фурье, можно
получить и
проанализировать
спектр сигнала, т.е.
представление его в
виде суммы
синусоид со
всевозможными
частотами.
ПРИАнализ
ОБРАБОТКЕ
спектраСИГНАЛ
данного УПРАВЛЕНИЯ
сигнала позволяет
И МОНИТОРИНГА
сделать вывод ПОЛОСА
о
ПРОПУСКАНИЯ
значительномОПРЕДЕЛЯЕТСЯ
вкладе в формирование
КАК РАБОЧАЯ
сигнала ЧАСТОТА
всего двухДАТЧИКА
частот:
ИЛИF1≈1.14
ИЗМЕРИТЕЛЬНОГО
Гц и F2≈4.2 Гц.МЕХАНИЗМА.
ТОЛЬКО
Следовательно,
СИГНАЛЫ,достаточно
НАХОДЯЩИЕСЯ
измерять
В ЭТОМ
сигналДИАПАЗОНЕ
с частотой 2×F2≈8.4
МОГУТ Гц.
БЫТЬ ИЗМЕРЕНЫ ИЛИ ИЗМЕНЕНЫ.
Выбираем Fизм=100 Гц (период ΔTизм=0.01 с, 88 измерений на оборот).
16. ГОСТ Р 52931-2008 Приборы контроля и регулирования технологических процессов
Выбор частоты опроса датчика1. График А – частота гармонического сигнала меньше частоты
Найквиста. Дискретным
отсчетам
может дискретизации
соответствовать только
Существует общее правило, позволяющее
выбирать
частоту
исходная гармоника, амплитуда, частота и фаза которой могут
этого сигнала. Оно базируетсябыть
на теореме
(известной
так же,
однозначноКотельникова
определены по любым
трем последовательным
как критерий Найквиста).
точкам (три уравнения, три неизвестных).
Asin(2πft1+φ)=b1 сигнала выбирается из условия
Вот это правило: частота дискретизации
Asin(2πft2+φ)=b2
Fизм ≥ 2×F, где F – максимальная
частота изменения сигнала.
Asin(2πft3+φ)=b3
Три возможных варианта соотношения частот гармонических сигналов с постоянной частотой их
2. График В – частота гармонического сигнала равна частоте
дискретизации
Найквиста.
Это означает периодическое повторение каждой пары
последовательных отсчетов, а, следовательно, для решения
имеется только два уравнения с тремя неизвестными с
возможностью определения только частоты, и то при условии,
что начальная фаза сигнала не совпадает с начальной фазой
частоты дискретизации (в этом случае все отсчеты нулевые).
Амплитуда и фаза сигнала определяются однозначно только при
условии совпадения отсчетов с экстремумами гармоники.
3. График С – частота гармонического сигнала больше частоты
Найквиста. Решение трех уравнений по трем последовательным
точкам позволяет определить амплитуду гармоники, но дает
искаженные значения частоты и фазы колебания (показано
пунктиром). Это так называемый эффект появления ложных
(кажущихся) частот (aliasing).
17. ГОСТ Р 52931-2008 Приборы контроля и регулирования технологических процессов
Сигналы, которые вырабатываются датчиками, должны быть согласованы синтерфейсом компьютера.
Как при передаче аналоговых, так и цифровых сигналов, если следующие
друг за другом биты равны (оба "0" или оба "1"), то трудно сказать, когда
кончается один и начинается другой. Для решения этой задачи приемник и
передатчик надо синхронизировать, т. е. одинаково отсчитывать интервалы
времени.
То есть необходимо отслеживать скорость обмена данными через
последовательный порт.
Для обмена данными с компьютером используйте следующие
значения:
300, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 38400, 57600 или
115200 бит/с.
Самым распространенным значением является 9600 бит/с.
Если скорость отправления данных источником совпадает со
скоростью приема данных, то контроллер будет способен получать
данные от внешних устройств.
[Формуляр протокола согласования приема/передачи
данных согласно МЭК-870-5-104 ПО «ОИК Диспетчер НТ»]
18. Искажение спектра сигнала и линии связи
Линия связи искажает передаваемые сигналы из-за того,что ее физические параметры отличаются от идеальных.
Так, например, медные провода всегда представляют собой
некоторую распределенную по длине комбинацию активного
сопротивления, емкостной и индуктивной нагрузки . В
результате для синусоид различных частот линия будет
обладать различным полным сопротивлением, а значит, и
передаваться они будут по-разному.
Волоконно-оптический кабель также имеет отклонения,
мешающие идеальному распространению света.
Если линия связи включает промежуточную аппаратуру, то
она также может вносить дополнительные искажения, так как
невозможно создать устройства, которые бы одинаково хорошо
передавали весь спектр синусоид, от нуля до бесконечности.
Представление линии как распределенной индуктивно-емкостной нагрузки
19.
ГОСТ Р 52931-2008 Приборы контроляи регулирования технологических
процессов
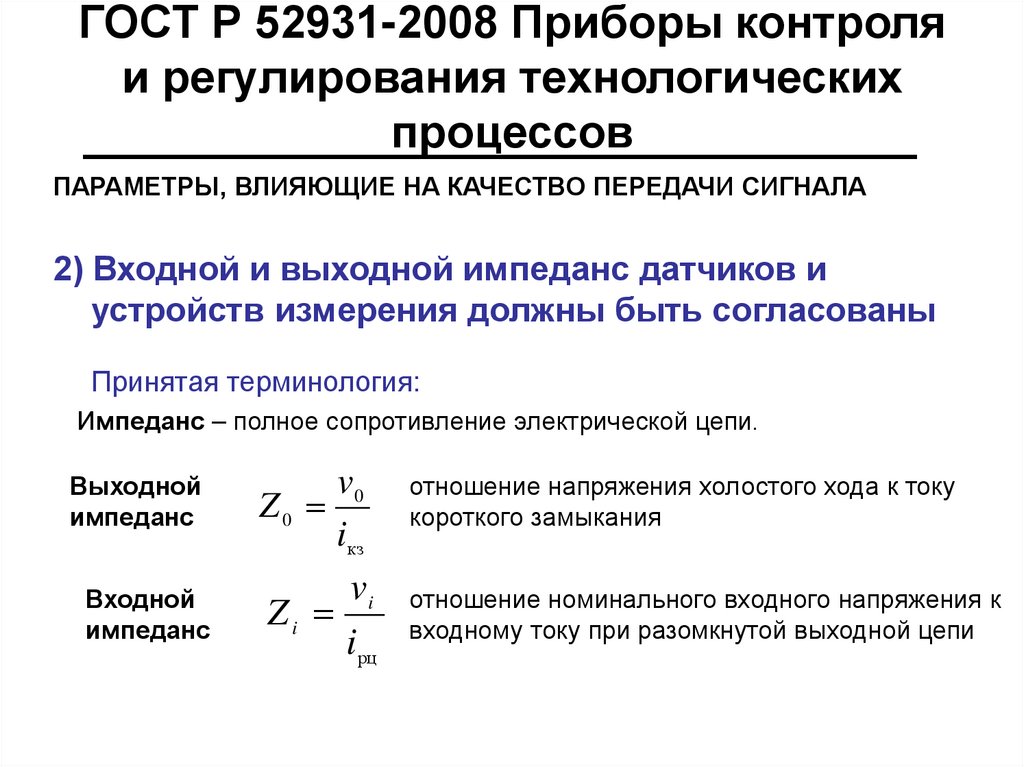
ПАРАМЕТРЫ, ВЛИЯЮЩИЕ НА КАЧЕСТВО ПЕРЕДАЧИ СИГНАЛА
2) Входной и выходной импеданс датчиков и
устройств измерения должны быть согласованы
Принятая терминология:
Импеданс – полное сопротивление электрической цепи.
Выходной
импеданс
Входной
импеданс
v0
Z0
iкз
vi
Zi
iрц
отношение напряжения холостого хода к току
короткого замыкания
отношение номинального входного напряжения к
входному току при разомкнутой выходной цепи
20.
ГОСТ Р 52931-2008 Приборы контроляи регулирования технологических
процессов
ПАРАМЕТРЫ, ВЛИЯЮЩИЕ НА КАЧЕСТВО ПЕРЕДАЧИ СИГНАЛА
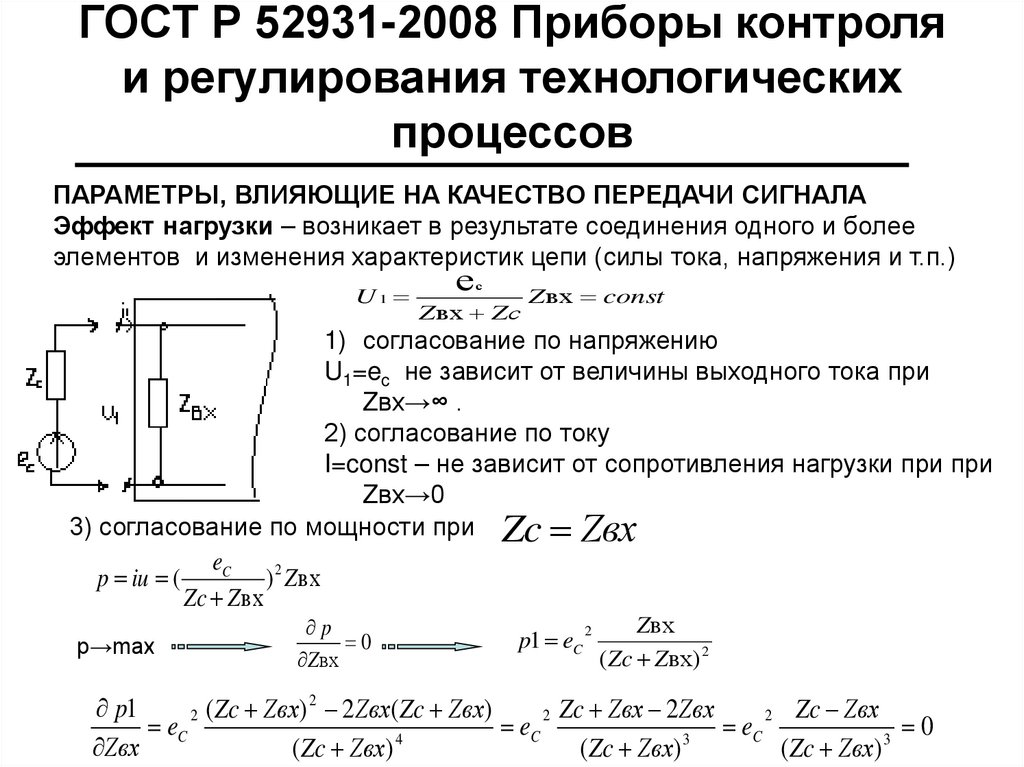
Эффект нагрузки – возникает в результате соединения одного и более
элементов и изменения характеристик цепи (силы тока, напряжения и т.п.)
U1
е
с
Zвх Zс
Zвх const
1) согласование по напряжению
U1=ec не зависит от величины выходного тока при
Zвх→∞ .
2) согласование по току
I=const – не зависит от сопротивления нагрузки при при
Zвх→0
3) согласование по мощности при Zc Zвх
eC
p iu (
) 2 Zвх
Zc Zвх
p→max
p
0
Zвх
p1 eC
2
Zвх
( Zc Zвх) 2
2
p1
2 ( Zc Zвх) 2Zвх( Zc Zвх)
2 Zc Zвх 2 Zвх
2 Zc Zвх
eC
e
e
0
C
C
4
3
3
Zвх
( Zc Zвх)
( Zc Zвх)
( Zc Zвх)
21. Согласование сигналов (выводы)
Для входных цепейУСТРОЙСТВО С ВЫСОКИМ ВХОДНЫМ ИМПЕДАНСОМ ПОТРЕБЛЯЕТ
МЕНЬШИЙ ТОК ПРИ ЗАДАННОМ НАПРЯЖЕНИИ. УСТРОЙСТВО С НИЗКИМ
ВХОДНЫМ ИМПЕДАНСОМ ПОТРЕБЛЯЕТ БОЛЬШИЙ ТОК, А,
СЛЕДОВАТЕЛЬНО, ОТНИМАЕТ БОЛЬШУЮ МОЩНОСТЬ.
Для выходных цепей
УСТРОЙСТВОМ С ВЫСОКИМ ВЫХОДНЫМ ИМПЕДАНСОМ
ЧУВСТВИТЕЛЬНО К ЭФФЕКТУ НАГРУЗКИ, ЕСЛИ ПЕРЕДАЧА СИГНАЛА
ИДЕТ ПО НАПРЯЖЕНИЮ. В СЛУЧАЕ СОГЛАСОВАНИЯ ПО ТОКУ ВЫСОКИЙ
ВЫХОДНОЙ ИМПЕДАНС ВЕДЕТ К СНИЖЕНИЮ ЭФФЕКТА ПО ТОКУ.
22. Согласование сигналов (как оно достигается аппаратно)
ПОДБОР ВХОДНЫХ И ВЫХОДНЫХ ИМПЕДАНСОВ для входных цепейконтроллеров в зависимости от типа входного сигнала
ВЫХОДНОЙ
ИМПЕДАНС ПЕРВОГО
Если повторитель
напряжения
присоединен последовательно к
УСТРОЙСТВА ДОЛЖЕН БЫТЬ ГОРАЗДО
измерительному преобразователю,
имеющему
высокий выходной
МЕНЬШЕ,
ЧЕМ ВХОДНОЙ ИМПЕДАНС
импеданс, то новая система будет
ВТОРОГО что
(согласование
по напряжению)
иметь те же характеристики,
и
исходная,
но выходной
импеданс
Повторитель
напряжения:
Дифференциальный усилитель:
будет низким
R2
+15В
+15В
vi
R1
-
vi1
v0
+
R1
v0
+
vi2
R2
-15В
-15В
23. Передача сигналов
Если по обоим проводникам двухпроводной линии текут токи,имеющие одинаковые амплитуды, но развернутые на 180 по
фазе, говорят, что линия сбалансирована.
Если кабель с импедансом 50 Ом
присоединяется к кабелю с импедансом 300
Ом, между ними должна быть включена
специальная
резистивная схема
z1
z2
кабель с импедансом
50 Ом
z3
кабель с импедансом
300 Ом
Преимущества сбалансированной сети в том, что она менее
чувствительна к внешним возмущениям; эта цепь излучает меньшую
энергию, поскольку электромагнитные поля отдельных проводников
компенсируют друг друга.
24. ГОСТ Р 52931-2008 Приборы контроля и регулирования технологических процессов
3) Возмущения и шум – искажения измерительного сигналав процессе формирования и передачи.
Электрические сигналы, приводящие к неожиданным отклонениям в работе, называются
помехами.
Основной характеристикой помехи является зависимость спектральной плотности
мощности от частоты основных источников электромагнитных помех.
Собственные шумы –
колебания, вызванные
хаотическим движением
носителей заряда во всех
электротехнических
материалах.
от вспышки
молнии
при
переключении
индуктивной
помехи от
нагрузки
радиостанций
25. Способ защиты от помех - заземление
ОпределенияЗаземляющим устройством называют совокупность заземлителя (т.е.
проводника, соприкасающегося с землей) и заземляющих проводников.
Общим проводом (проводником) называют проводник в системе
автоматики, относительно которого отсчитываются потенциалы.
Сигнальным заземлением называют соединение с землей общего
провода цепей передачи сигнала.
Сигнальная земля делится на цифровую землю и аналоговую.
Сигнальную аналоговую землю иногда делят на землю аналоговых
входов и землю аналоговых выходов.
Защитное заземление служит исключительно для защиты людей от
поражения электрическим током. Наличие защитного заземления часто
приводит к увеличению уровня помех в системах автоматики, однако
оно является необходимым, поэтому исполнение сигнальной и силовой
земли должно базироваться на предположении, что защитное
заземление имеется и оно выполнено в соответствии с правилами.
Защитное заземление можно не применять только для оборудования с
напряжением питания до 42 В переменного или 110 В постоянного
тока, за исключением взрывоопасных зон.
26. Определения
Виды заземленийОдним из путей ослабления вредного влияния цепей заземления на
системы автоматизации является раздельное выполнение
заземлений для устройств, имеющих разную чувствительность к
помехам или являющихся источниками помех разной мощности.
Силовое заземление
В системах автоматики могут использоваться электромагнитные реле, микромощные
серводвигатели, электромагнитные клапаны и другие устройства, ток потребления
которых существенно превышает ток потребления модулей ввода-вывода и
контроллеров. Общий провод системы (обычно провод, подключенный к
отрицательному выводу источника питания) является силовой землей.
Аналоговая и цифровая земля
Системы промышленной автоматики являются аналого-цифровыми. Поэтому одним
из источников погрешностей аналоговой части является помеха, создаваемая
цифровой частью системы. Для исключения прохождения помех через цепи
заземления цифровую и аналоговую землю выполняют в виде несвязанных
проводников, соединенных вместе только в одной общей точке.
«Плавающая» земля
"Плавающая" земля образуется в случае, когда общий провод небольшой части
системы электрически не соединяется с шиной защитного заземления (т.е. с Землей).
Типовыми примерами таких систем являются батарейные измерительные приборы.
"Плавающая" земля может быть получена и с помощью DC-DC или AC-DC
преобразователей, если вывод вторичного источника питания в них не заземлен.
Такое решение позволяет полностью исключить кондуктивные наводки через общий
27. Виды заземлений
Питающая сеть является источникомследующих помех
Изменение действующего напряжения в
течение суток
Фон – колебания с частотой
питающей сети или кратной
ей. Такие колебания
попадают на вход устройства
по цепям питания из-за
недостаточной сглаженности
выпрямляемого питающего
напряжения.
Наводки – помехи,
наводимые на эл. цепи
внешними
электромагнитными полями.
часть напряжения помехи попадает на выход источника
питания через участок провода, выделенный жирной
линией
Пути проникновения помехи из сети
220 В, 50 Гц в систему заземления и
общий провод источника питания
путь протекания тока помехи, включающий сопротивление заземляющего проводника
28. Питающая сеть является источником следующих помех
Проводные каналы передачисигналов.
Электрические помехи
Сигнал, передаваемый от датчика по
электрическому проводнику, может
подвергнуться зашумлению под
влиянием среды из-за нежелательных
связей резистивного, индуктивного или
емкостного характера.
Емкостная связь
Переменное напряжение наводит
в проводнике ток i:
dv
i C
dt
Способ устранения:
защитный заземленный
электростатический экран.
Резистивная связь
Несколько устройств имеют общий:
•Источник питания
•Заземление.
Способ устранения:
•Выделенный источник питания
•Гальваническая развязка между
источниками питания.
S1
+
v0
vi
-
S2
Индуктивная связь
Проводник с током индуцирует
вокруг себя магнитное поле:
V
d (M i)
dt
29. Проводные каналы передачи сигналов. Электрические помехи
Оборудование, являющееся источникомпомех недопустимо высокого уровня
• Устройства, в которых происходит переключение уровня тока
или напряжения за короткий промежуток времени, являются
источниками широкополосных помех (двигатели, выключатели,
реле и контакторы, трамвайные токосъемники и т. п.).
• Устройства, в которых происходит периодическое изменение
тока или напряжения с ограниченной скоростью нарастания,
дают узкополосные помехи (например, сотовые телефоны,
радиопередатчики, генераторы сигналов, микроволновые печи,
микропроцессорные системы).
• В сигнальных цепях и цепях заземления систем автоматизации
содержится весь спектр возможных помех. Однако паразитное
влияние оказывают только помехи, частоты которых лежат в
полосе пропускания устройств автоматики.
Государственные центры стандартизации и сертификации во всех
странах мира не допускают к производству оборудование, являющееся
источником помех недопустимо высокого уровня. Однако уровень
помех невозможно сделать равным нулю.
В России допустимый уровень помех и устойчивость оборудования к их
воздействию нормируются ГОСТ Р 51318.14.1, ГОСТ Р 51318.14.2,
ГОСТ Р 51317.3.2, ГОСТ Р 51317.3.3, ГОСТ Р 51317.4.2, ГОСТ
51317.4.4, ГОСТ Р 51317.4.11, ГОСТ Р 51522, ГОСТ Р 50648.
30.
Передача сигналов.Электрические помехи.
Правила размещения оборудования
• Снизить интенсивность источника помех
• Минимизировать гальванические связи
• Снизить расстояние до источника помех
• Минимизировать частотный спектр помех
• Применять экранированный кабель
• Минимизировать длину неэкранированных участков на концах кабеля
• Использовать витой кабель
• Прокладывать раздельно силовые и сигнальные кабели
• Располагать сигнальные кабели на достаточном расстоянии от
источников помех
• Располагать низковольтные и высоковольтные кабели под прямым
углом
31. Передача сигналов. Электрические помехи. Правила размещения оборудования
ДатчикиПервичные приборы, датчики или первичные преобразователи
предназначены для непосредственного преобразования
измеряемой величины (СИГНАЛА) в другую величину, удобную
для измерения или использования.
Выходными сигналами первичных приборов, датчиков являются
как правило унифицированные стандартизованные сигналы, в
противном случае используются нормирующие преобразователи.
Первичным измерительным преобразователем называется
устройство, включающее чувствительный элемент, на который
непосредственно воздействует измеряемая величина, и измерительный
преобразователь, осуществляющий преобразование реакции
чувствительного элемента в электрический сигнал.
32. Датчики
Нормирующий преобразователь НП выполняет следующие функции:- преобразует нестандартный неунифицированный сигнал (например, мА,
mV, Ом) в стандартный унифицированный выходной сигнал;
- осуществляет фильтрацию входного сигнала;
- осуществляет линеаризацию статической характеристики датчика;
- применительно к термопаре, осуществляет температурную компенсацию
холодного спая.
Нормирующий преобразователь НП применяется, также в
следующих случаях:
- когда необходимо подать сигнал измеряемой величины на несколько
измерительных или регулирующих приборов;
- когда необходимо передать сигнал на большие расстояния, например
сигнал от термопары передается на малые расстояния - до 10м, а
унифицированный сигнал постоянного тока может передаваться на
большие расстояния - до 100м.
33. Датчики
Классификация датчиков(по типу выходного сигнала)
Виды датчиков
Аналоговые
( сигнал, пропорционально изменению
входной величины )
Цифровые
(генерирующие последовательность
импульсов или двоичное слово)
Бинарные
(вырабатывают сигнал только двух уровней:
«включено/выключено» (иначе говоря, 0 или 1).)
(по принципу действия)
По принципу действия датчики можно разделить на два
класса: генераторные и параметрические (датчики-модуляторы).
Генераторные / активные преобразователи осуществляют
преобразование различных видов энергии в электрическую, то есть
они генерируют электрическую энергию (термоэлектрические,
пьезоэлектрические, электрокинетические, гальванические и др.
датчики).
Параметрические датчики входную величину преобразуют в
изменение какого-либо электрического параметра (R, L или C) датчика.
Данным приборам для работы необходим источник энергии. К ним
относятся реостатные, тензодатчики, термосопротивления и т.п.
34. Классификация датчиков (по типу выходного сигнала)
Классификация датчиков (по принципу действия)Активные преобразователи
Большинство датчиков являются электрическими. Это обусловлено
следующими достоинствами электрических измерений:
- электрические величины удобно передавать на расстояние, причем
передача осуществляется с высокой скоростью;
- электрические величины универсальны в том смысле, что любые другие
величины могут быть преобразованы в электрические и наоборот;
- они точно преобразуются в цифровой код и позволяют достигнуть высокой
точности, чувствительности и быстродействия средств измерений.
Выходными сигналами активных датчиков могут быть: изменяющееся по
линейному закону напряжение постоянного тока, величина тока или величина
сопротивления датчика.
Питание активных датчиков должно осуществляться от внешнего блока
питания.
Подключение датчиков с выходным сигналом в виде постоянного
напряжения (от минус 50,0 до 50,0 мВ, от 0 до 10,0 В) и сопротивления
(25...2000 Ом) может осуществляться непосредственно к входным
контактам прибора (см. слайд №32).
При подключении датчиков с выходом в виде тока (от 0 до 5 мА, от 0 до
20 мА, от 4 до 20 мА) – обязательным является установка
шунтирующего резистора сопротивлением 50.0 Ом (см. слайд №32).
35. Классификация датчиков (по принципу действия) Активные преобразователи
Классификация датчиков (по принципу действия)Примеры. Активные преобразователи
Принцип действия термопар основан на эффекте Зеебека, в
соответствии с которым нагревание точки соединения двух
разнородных проводников, вызывает на противоположных концах
этой цепи возникновение электродвижущей силы – термоЭДС.
Величина термоЭДС изначально определяется химическим
составом проводников и, кроме этого, зависит от температуры
нагрева.
Т-измеряемая температура,
Тcj- температура м/д свободными
концами термопары
Полупроводниковые датчики температуры
Полупроводниковые датчики регистрируют изменение характеристик p-n
перехода под влиянием температуры. В качестве термодатчиков могут
быть использованы любые диоды или биполярные транзисторы.
36. Классификация датчиков (по принципу действия) Примеры. Активные преобразователи
Классификация датчиков (по принципу действия)Параметрические датчики
Параметрические датчики (датчики-модуляторы) входную величину X
преобразуют в изменение какого-либо электрического параметра (R,
L или C) датчика.
Передать на расстояние изменение перечисленных параметров датчика
без энергонесущего сигнала (напряжения или тока) невозможно.
Выявить изменение соответствующего параметра датчика только и можно
по реакции датчика на ток или напряжение, поскольку перечисленные
параметры и характеризуют эту реакцию. Поэтому параметрические
датчики требуют применения специальных измерительных цепей с
питанием постоянным или переменным током.
Примеры
•Омические (резистивные) датчики – принцип действия основан на
изменении их активного сопротивления при изменении длины l, площади
сечения S или удельного сопротивления p:
R= pl/S
Кроме того, используется зависимость величины активного сопротивления
от контактного давления и освещённости фотоэлементов. В
соответствии с этим омические датчики делят на: контактные,
потенциометрические (реостатные), тензорезисторные,
терморезисторные, фоторезисторные.
37. Классификация датчиков (по принципу действия) Параметрические датчики
Классификация датчиков (по принципу действия)Примеры. Параметрические датчики
Контактные датчики — это
простейший вид резисторных датчиков,
которые преобразуют перемещение
первичного элемента в скачкообразное
изменение сопротивления
электрической цепи. С помощью
контактных датчиков измеряют и
контролируют усилия, перемещения,
температуру, размеры объектов,
контролируют их форму и т. д.
Недостаток контактных датчиков —
сложность осуществления
непрерывного контроля и ограниченный
срок службы контактной системы. Но
благодаря предельной простоте этих
датчиков их широко применяют в
системах автоматики.
Датчики положения
+
R
l
‒
В датчиках этого типа в качестве
чувствительного элемента
используется резистор переменного
сопротивления, ползунок которого
механически связан с регулирующей
частью исполнительного механизма.
Для работы переменного резистора
его необходимо включить в
электрическую цепь.
Фотоэлектрические датчики положения
Отличительными чертами фотоэлектрических датчиков
является их бесконтактный принцип измерений с
предоставлением выходной информации в цифровой
форме.
38. Классификация датчиков (по принципу действия) Примеры. Параметрические датчики
Классификация датчиков(по назначению, по природе измеряемых величин)
•Датчики физических величин
- датчики давления (для газов и жидкостей до 50МПа);
- датчики измерения потока/расхода (до 1000 л/мин);
- датчики влажности и температуры;
- датчики уровня;
•Датчики систем безопасности по SIL
- однолучевые датчики ST4;
- многолучевые датчики SF2-B / SF4-B и SF2C / SF4C;
- многолучевые лазерные сканеры SD3-A1;
Датчики систем безопасности широко применяются в промышленной автоматизации, а
соответствие поставляемой продукции требованиям SIL, позволяет гарантировать безопасность
на критически важных участках производства
.
•Измерительные датчики положения
Датчик положения (датчик перемещения) — это устройство, предназначенное для определения
местоположения объекта, который может находиться в твердой или жидкой форме, а также
быть сыпучим веществом.
Датчики положения являются первичными источниками информации для систем автоматики,
как на основе релейных или логических схем, так и на базе программируемых контроллеров.
Измерительные датчики положения делятся на:
•- датчик контроля уровня;
•- датчики расхода
39. Классификация датчиков (по назначению, по природе измеряемых величин)
Классификация датчиков(по назначению)
•Бесконтактные датчики положения
Бесконтактные датчики / бесконтактные выключатели — это приборы промышленной
автоматизации, предназначенные для контроля положения объектов без механического
контакта с последним.
Бесконтактный датчик осуществляет коммутационную операцию при попадании объекта
воздействия в зону чувствительности датчика. Отсутствие механического контакта между
воздействующим объектом и чувствительным элементом датчика обеспечивает высокую
надежность его работы.
Бесконтактные датчики положения классифицируются по принципу действия чувствительного
элемента — индуктивный, оптический, емкостный и др.
Различают бесконтактные датчики положения следующих типов:
•- универсальные фотоэлектрические датчики (оптические датчики с большой дальностью
зондирования);
•- миниатюрные фотоэлектрические датчики (возможность размещать в малогабаритных и
труднодоступных местах);
•- фотоэлектрические датчики с подавлением фона (BGS);
•- индуктивные датчики;
•- лазерные датчики положения;
•Механические выключатели
Механические выключатели бывают клавишные, кнопочные, рычажные,
ползунковые, поворотные и шнуровые (натяжные) и т.д.
В спектр механических выключателей входят:
•- пластиковые концевые выключатели;
•- металлические концевые выключатели;
•- тросовые выключатели для простой или аварийной остановки;
•- механичесие микропереключатели;
•- педальные выключатели открытого и закрытого типов;
40. Классификация датчиков (по назначению)
Сигналы и стандартыИз анализа предыдущего материала ясно, что не подвергнутые
обработке сигналы от датчиков весьма разнообразны и диапазон их
изменения простирается от нескольких милливольт (для термопары) до
более чем сотни вольт для тахогенератора. Кроме того, они могут быть
вызваны изменениями напряжения постоянного тока, переменного тока
или даже сопротивления. Поэтому совершенно очевидно, что если
аналоговые входные платы работают лишь в определенном диапазоне
сигналов, то необходимо использовать некоторую стандартизацию.
В результате происхождение входного сигнала можно представить так:
Первичный сигнал от датчика на месте преобразуется электронным устройством
в определенный стандартный сигнал, а совокупность датчика и этого
устройства называется передатчиком или преобразователем. После этого
стандартизированный сигнал, несущий информацию об измеряемой
переменной объекта управления, может быть подан на обычную аналоговую
входную плату.
41. Сигналы и стандарты
Возникает естественный вопрос: каким должен быть этотстандартизированный сигнал?
Аналоговые сигналы — это сигналы низкого уровня и поэтому
подвержены электрическим помехам (или шумам, как их чаще всего
называют).
Сигнал, представленный электрическим током, менее подвержен влиянию
шумов, чем сигнал, представленный напряжением, поэтому обычно
выбирается токовый контур.
Преобразователь и принимающее устройство соединяются по схеме (см.
рис.), причем токовый сигнал на приемной стороне преобразуется в
напряжение при помощи балластного резистора. Токовый контур можно
использовать с несколькими приемными устройствами (это могут быть,
например, измерительный прибор, диаграммный самописец или вход
ПЛК), соединенными последовательно.
Токовый контур 4-20 мА
42. Сигналы и стандарты
Передача аналоговых измерительныхсигналов
Передача сигнала напряжением
Передача сигнала током
Стандарт IEC 381
Стандарт IEC 381
от +1 до +5В
от 4 до 20мА
От 0 до +5В
Питание всех элементов и передача сигнала
могут осуществляться по одной и той же
паре проводов.
От 0 до +10
От -10 до +10В
Для передачи сигнала напряжением необходима Преобразователь напряжения в ток
трёхпроводная линия: по одному проводу течет
постоянный ток для питания датчика, по другому
+ и
поступают сигналы от датчика к обрабатывающим
согласующим устройствам, а третий провод являются
Vi
0-10В
общим для обоих контуров.
R
Усилитель с высоким
входным импедансом
сигнальный провод
+15В
Витая пара
4-20 мА
постоянный ток
R
Rshunt
+
-
Измерительный
резистор
R
Источник
постоянного
тока
V0
0-10В
R
общее замыкание
ПЛК
Схема подключения активного
датчика с выходом в виде
напряжения
Схема подключения активного
датчика с токовым выходом
ПРЕДУПРЕЖДЕНИЕ Установка
шунтирующего резистора Rш –
обязательна!
Rш=50 Ом
+15В
43. Передача аналоговых измерительных сигналов
Достоверность исходных данных иаварийная сигнализация
Результатом контроля является заключение о соответствии или
несоответствии характеристик изделия. Может быть получено несколько
градаций состояния соответствия. Контроль характеризуется достоверностью,
т.е. степенью доверия к его результатам. Если контроль выполняется с
помощью средств измерений, он называется измерительным контролем.
сигнал
Вторые пороговые
значения
Полоса
гистерезиса
Первые пороговые
значения
время
Главным методом обеспечения достоверности является сопоставление
результатов измерения одной и той же величины разными, не связанными
друг с другом способами.
44. Достоверность исходных данных и аварийная сигнализация
Статическая характеристика датчикаНа практике встречаются три основных варианта градуировычных
характеристик:
Статическая характеристика датчика –
1. Линейные, описываемые зависимостью:
y=Sx+b,
откуда x=(y-b)/S,
где S функциональная
зависимость
между измеряемой
чувствительность датчика величиной
и b – постоянный
коэффициент.
Наиболее
х и выходным
сигналом датчика:
y=F(x)
применимая для большинства
случаев характеристика.
в установившемся
режиме. Такими
характеристиками обладают,
например,
датчикивдавления,
уровня,
pH –
Задача
заключается
определении
измеряемой
метры, ротаметры, многие автоматические
газоанализаторы,
датчикиy, т.е. в
величины по выходному
сигналу датчика
химического состава и др. измерительные
преобразователи.
нахождении функции:
x=F’(y)=f(y), где f(y) –
статистической
характеристике
2. Нелинейные, описываемые функция,
известнойобратная
аналитической
зависимостью.
называемая его
градуировочной
Типичным примером могут датчика,
служить расходомеры
переменного
перепада
давления с градировочной характеристикой.
характеристикой вида: x = a√ y , где a –
Под динамической
характеристикой
датчика
постоянный коэффициент (если
условия измерения
соответствуют
понимают поведение выходной величины во время
градуировочным).
переходного процесса в ответ на мгновенное
3. Нелинейные, заданные градуировочной таблицей. К этой группе относятся,
(ступенчатое) изменение его входной величины.
например, термопара и термометры сопротивления. Градуировочные
характеристики, заданные таблицей, чаще всего, аппроксимируют
аналитическими выражением, которое в дальнейшем и используется для
расчета оценок измеряемой величины.
45. Статическая характеристика датчика
Определение измеряемой величины xПри расчете действительных значений измеряемых величин в ПЛК
задача заключается в определении измеряемой величины x не по
выходному сигнала y датчика, а по коду АЦП КАЦП.
y=1
xmin
k=tgα=1/(xmax-xmin)
x
x
max
xmax xmin
K max
АЦП
x
x
K АЦП
K
x
АЦП
max
K АЦП
xmax xmin
x x
x
K АЦП
K max
АЦП
xmax xmin
где maх KАЦП - максимальное значение кода АЦП, определяемое его разрядностью: KАЦП max= 2N -1,
где N число двоичных разрядов АЦП, xmax , xmin - соответственно максимальное и минимальное
значение выходного сигнала датчика.
При xmin = 0 формула приобретет вид:
x
x
K АЦП
K max
АЦП
xmax
46. Определение измеряемой величины x
Конец47. Конец
Что узнали?Узнали принцип работы конкретных
датчиков?
Все значимые гармоники сигнала
датчика должны попадать в полосу
пропускания входной линии МК!
Датчик может иметь стандартный
выходной сигнал по напряжению.
Как обеспечить согласование датчика с
входным сопротивлением МК?
Датчик имеет стандартный выходной
сигнал по току.
Как обеспечить согласование датчика с
входным сопротивлением МК?
Классификация датчиков показывает их
огромное разнообразие. Изучает датчики
дисциплина «Измерительная техника»
(слайды 40-41)
Достигается правильным выбором
частоты опроса датчика! (слайды 19-23)
Эту проблему взяли на себя разработчики
МК! На входе МК установлен ОУ, у
которого Zвх→∞.(слайды 27-31)
Эту проблему должен разрешить
проектировщик аппаратного обеспечения!
Входное сопротивление МК должно быть
Zэкв.вх→0. Для этого требуется установка
шунтирующего резистора Rш на входе МК
(слайды 27-31)
48. Что узнали?
Имеются омические(резистивные) датчики – принцип
действия которых основан на
изменении их активного
сопротивления при изменении
длины l, площади сечения S или
удельного сопротивления p: R= pl/S
Как они подключаются ко входу МК?
Такие датчики требуют применения
специальных измерительных цепей с
питанием постоянным или
переменным током (слайды 36-39).
Схемы введения данных измерения
R1=var
Vпит=5 В
контроллер
Аналоговый
вход
iОУ→ 0
Vвых АЦП
+
Подключение датчика изгиба к
контроллеру
Исходные данные датчика изгиба:
Простой гибкий датчик длиной 5,5 см.
Неизгибаемое сопротивление: ~
25000 Ом
При угле изгиба φ в 90 градусов
сопротивление изгибу: ~ 50000 Ом
При угле изгиба φ в 180 градусов
сопротивление изгибу: ~ 125000 Ом
R2
Vвх
_
Δφ→ΔR→ΔVвх
Подбираем величину сопротивления R2.
Динамический диапазон измеряемого
напряжения Vвх (0<Vвх <Vпит).
Выбираем резистор R2=22 кОм (ряд
E24, Pном=0,01 Вт). V V R2
вх
Vвх min 5
22
0,75B
147
пит
R1 R2
22
Vвх max 5
2,34 B
47
С повышением величины сопротивления R2 напряжение Vвхмах увеличивается,
а напряжение Vвхмin уменьшается.
49. Что узнали?
Схемы подключения датчиков различных типов(повторение мать учения)
– Схема подключения термометра сопротивления
– Схема подключения активного датчика с выходом
в виде напряжения
-50.0…50.0 мВ или 0…1.0 В
– Схема подключения термоэлектрического преобразователя
– Схема подключения активного датчика с токовым
выходом 0…5.0, 0…20.0 или 4…20.0 мА
(Rш=49,900 ± 0,0499 Ом)
ПРЕДУПРЕЖДЕНИЕ Установка шунтирующего
резистора Rш – обязательна!
.
– Схема подключения датчика
положения резистивного типа
0…900 Ом или 0…2000 Ом
Схема подключения датчиков «сухие контакты»
50. Что узнали? Схемы подключения датчиков различных типов (повторение мать учения)
Что узнали?Как выполнить защиту информации от 1.Один из лучших способов
помех, поступающих по цепи питания? защититься от помех по питанию –
питать силовую и логическую части от
Если силовая часть питается от
отдельных источников питания:
одного источника с
хороший малошумящий источник
микроконтроллером, то помехи по
питания на микроконтроллер и
питанию неизбежны. Как их избежать? модули/сенсоры, и отдельный на
силовую часть.
Методы фильтрации с целью исключения
случайной погрешности измерения датчика
основаны на гипотезе о том, что спектр
случайного процесса e(t) содержит более высокие
частоты, чем спектр полезного сигнала x(t).
Внешне фильтрация проявляется в том, что
реализация процесса z(t) становится более
плавной, чем исходная реализация y(t). Отсюда
второе название той же процедуры - сглаживание.
2.Используйте фильтры.
Простейший способ защитить МК от таких помех –
конденсаторы по питанию. Их устанавливают как
можно ближе к МК: электролит 6.3V 470 uF (мкФ)
и керамический на 0.1-1 мкФ.
Конденсатор, включенный на выходе выпрямителя В
параллельно нагрузке, запасает энергию, заряжаясь во
время возрастания напряжения выпрямителя, и отдает ее,
разряжаясь на сопротивление нагрузки, когда оно
снижается.
Ещё лучше с фильтрацией помех справится LC
фильтр. Индуктивность нужно брать с номиналом
в районе 100-300 мкГн. Конденсатор – электролит
с ёмкостью 100-1000 uF.
51. Что узнали?
Как защититься от индуктивноговыброса?
Как известно, при размыкании
контактов в цепи питания
индуктивной нагрузки происходит
так называемый индуктивный
выброс, который резко
подбрасывает напряжение в цепи
вплоть до того, что между
контактами реле или выключателя
может проскочить электрическая
дуга (искра). В дуге нет ничего
хорошего – она выжигает частички
металла контактов, из за чего они
изнашиваются и со временем
приходят в негодность.
Для защиты от выбросов ЭДС
самоиндукции в цепи постоянного
тока используют обыкновенный диод,
установленный встречнопараллельно нагрузке и максимально
близко к ней. Диод просто закоротит
на себя выброс:
где VD – защитный диод, U1 –
выключатель (транзистор, реле),
а R и L схематично олицетворяют
индуктивную нагрузку. Диод
нужно ОБЯЗАТЕЛЬНО ставить при
управлении индуктивной нагрузкой
(электромотор, соленоид, клапан,
электромагнит, катушка реле).
52. Что узнали?
Напряжение в сети является
синусоидой, которая 100 раз в
секунду пересекает значение 0.
Как уменьшить выброс при
отключении нагрузки?
Если выключить нагрузку в тот
момент, когда напряжение в сети
равно нулю – это сильно уменьшит
выброс. Для этих целей проще всего
использовать твердотельные реле
(SSR) с детектором нуля (ZeroCrossing Detector): такие реле сами
отключают и включают нагрузку в
нужный момент. Детектор нуля есть
почти во всех моделях
твёрдотельных реле, смотри
документацию.
53. Что узнали?
Выбросы ЭДС после отключения
нагрузки присутствуют также и в
цепях переменного тока,
особенно если нагрузка может
быть выключена в случайный
момент времени. Выброс
напряжения может проявляться
искрой между контактами в
момент отключения нагрузки, что
плохо для контактов и опасно в
целом.
Как уменьшить выброс при
отключении нагрузки в цепях
переменного тока?
Для гашения этих выбросов
используются цепи из резистора и
конденсатора. Для большинства
применений подойдёт резистор 39 Ом
0.5 Вт и конденсатор 0.1 мкФ 400V,
установленные вот по такой схеме:
54. Что узнали?
ФильтрыПод электрическими фильтрами понимают четырехполюсники,
включаемые между источником питания и приемником
(нагрузкой), назначение которых состоит в том, чтобы без
затухания пропускать к приемнику токи одних частот и
задерживать или пропускать с большим затуханием токи других
частот.
Для того чтобы четырехполюсник являлся фильтром, сигнал в
полосе пропускания должен передаваться с минимальным
искажением или без затухания. В этом случае передаточная
функция по напряжению может быть представлена в
следующем виде:
Если коэффициент затухания α = 0, то U1 = U2, то есть
амплитуда сигнала будет передаваться без ослабления, но
такая идеальная ситуация практически невозможна.
Вне области пропускания (в полосе затухания) в идеальном
случае
, т.е.
и I2=0 .
55. Фильтры
Пример практическойреализации фильтра низких
и верхних частот
ФНЧ
Коэффициент передачи по напряжению такого фильтра
рассчитывается по формуле:
где
– сопротивление ёмкости на частоте f.
Частота среза, при которой коэффициент передачи равен (или –
3дБ) относительно нулевой частоты вычисляется по формуле:
•Фрагмент программы
показан ниже:
•При этом предполагается,
что сопротивление
нагрузки достаточно
большое (много больше R).
56. ФНЧ
ФВЧФрагмент программы показан ниже:
57. ФВЧ
Контрольные вопросы• Для чего служат фильтры?
• Что такое полосы прозрачности и затухания?
• Как классифицируются фильтры в
зависимости от диапазона пропускаемых
частот?
• В каком режиме работают фильтры в полосе
пропускания частот?
• Почему рассмотренные фильтры нельзя
считать идеальными?