




 Программирование
ПрограммированиеПохожие презентации:






")



Инновации в робототехнике: Разработка и управление
1.
Инновации в робототехнике:Разработка и управление
Добро пожаловать на презентацию, посвященную передовым
достижениям в области робототехники, где мы рассмотрим
ключевые аспекты разработки и управления роботизированными
системами.
2.
Разработка и программирование БЛАПроектирование
Программирование
Разработка включает в себя проектирование корпуса,
Программное обеспечение определяет поведение БЛА,
выбор двигателей, системы управления и другие
включая траекторию полета, управление камерой и
технические решения.
автопилот.
3.
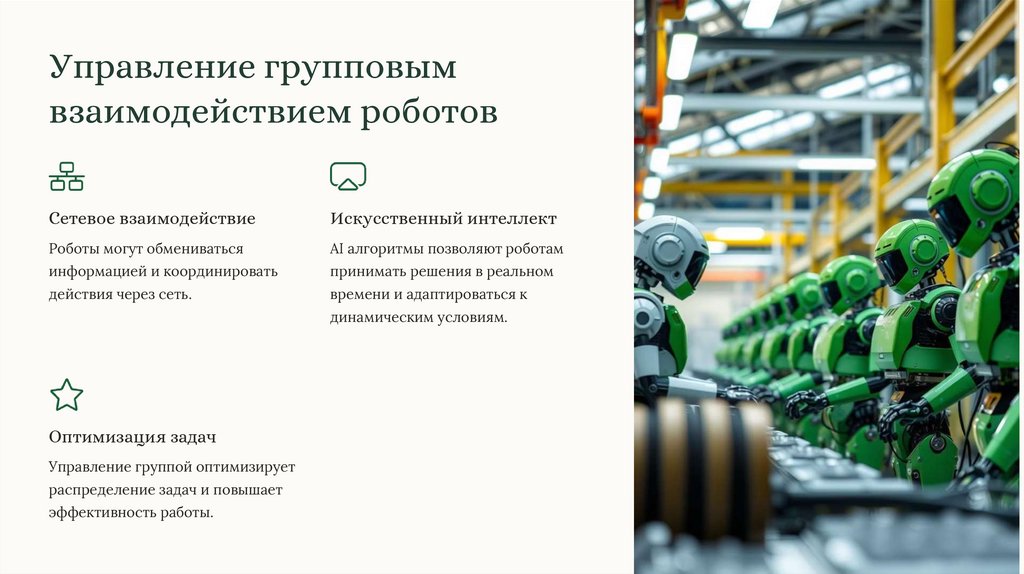
Управление групповымвзаимодействием роботов
Сетевое взаимодействие
Искусственный интеллект
Роботы могут обмениваться
AI алгоритмы позволяют роботам
информацией и координировать
принимать решения в реальном
действия через сеть.
времени и адаптироваться к
динамическим условиям.
Оптимизация задач
Управление группой оптимизирует
распределение задач и повышает
эффективность работы.
4.
Конструирование и моделированиеавтоматизированных систем
1
Моделирование
2
Прототипирование
3
Тестирование
4
Оптимизация
Процесс включает в себя создание виртуальных моделей, прототипов, тестирование и оптимизацию системы для
достижения требуемых характеристик.
5.
Система управленияполетами
1
Навигация
Система обеспечивает точную навигацию и контроль
над траекторией полета.
2
Стабилизация
Система стабилизирует полет БЛА, компенсируя
внешние факторы.
3
Автопилот
Автопилот позволяет БЛА выполнять задания без участия
человека.
6.
Бортовые видеокамерыВысокое разрешение
Широкий угол обзора
Современные камеры
Широкоугольные камеры
обеспечивают запись видео в
обеспечивают панорамный
высоком качестве с
обзор и позволяют
детализацией.
захватывать большие
пространства.
Стабилизация изображения
Стабилизация изображения компенсирует вибрацию во время
полета и обеспечивает четкое изображение.
7.
Системы передачи и приемавидеосигнала
Передача данных
Видеосигнал передается с БЛА на наземную станцию или
другое устройство.
Сжатие данных
Для эффективной передачи сигнал сжимается без потери
качества изображения.
Декодирование
Полученный сигнал декодируется и отображается на
устройстве приема.
8.
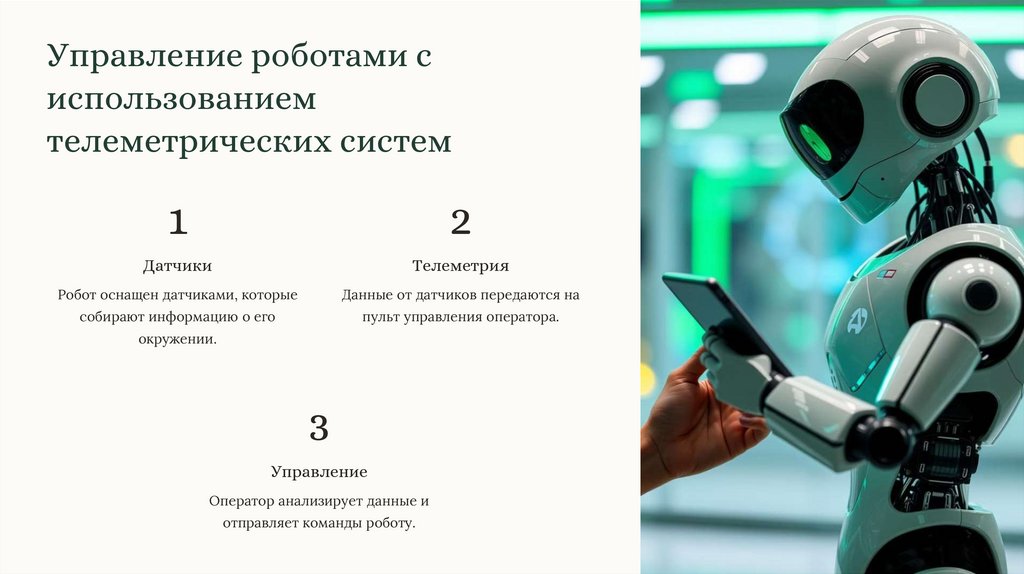
Управление роботами сиспользованием
телеметрических систем
1
2
Датчики
Телеметрия
Робот оснащен датчиками, которые
Данные от датчиков передаются на
собирают информацию о его
пульт управления оператора.
окружении.
3
Управление
Оператор анализирует данные и
отправляет команды роботу.
9.
Отладка роботизированных конструкций10.
Заключение и перспективыРазработка и управление роботизированными
системами – это быстро развивающаяся область,
которая открывает новые возможности для решения
сложных задач. Будущее робототехники обещает еще
более впечатляющие достижения.