









 Электроника
ЭлектроникаПохожие презентации:








")

Тема 6. Бортовые радиолокационные системы
1.
Тема 6. Бортовыерадиолокационные системы
2.
Метеонавигационные радиолокационные системы ВС.Назначение, обобщенная структурная схема,
тактикотехнические характеристики
Бортовая метеонавигационная радиолокационная станция предназначена для
решения следующих задач:
– радиолокационного обзора воздушного пространства (в горизонтальной и
вертикальной плоскости) с целью обнаружения метеообразований и зон в них,
опасных для полетов;
– радиолокационного обзора земной и водной поверхности для самолетовождения
по характерным наземным и водным ориентирам;
–
определения
наклонной
дальности
и
курсовых
радиолокационных ориентиров (РЛО) и метеообразований.
углов
наблюдаемых
3.
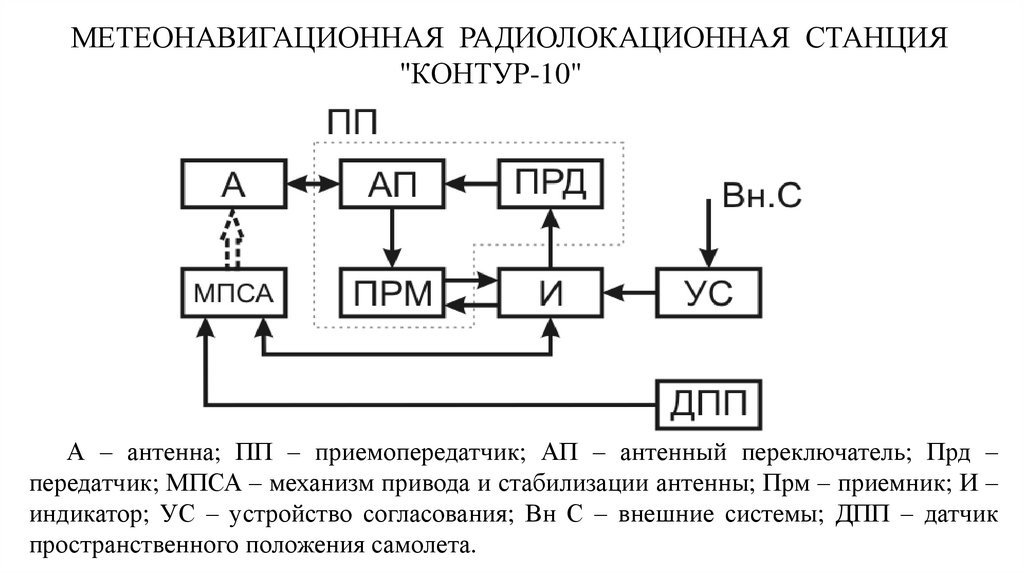
МЕТЕОНАВИГАЦИОННАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ"КОНТУР-10"
А – антенна; ПП – приемопередатчик; АП – антенный переключатель; Прд –
передатчик; МПСА – механизм привода и стабилизации антенны; Прм – приемник; И –
индикатор; УС – устройство согласования; Вн С – внешние системы; ДПП – датчик
пространственного положения самолета.
4.
Внешний вид метеонавигационного локатора "Контур"МНРЛС
«КОНТУР»
штатно
размещена
и
эксплуатируется на
самолетах: АН-28, АН38, Л410, Т101 «Грач»,
БЕ-12; БЕ-32, АН-72,Ту134, Ил-76, Бе-200;
вертолетах: Ми 8, Ми17,
и 171, Ми 172, Ми 26; В 3
«Сокол»,.
В эксплуатации находится
около 1000 комплексов.
1 – Антенна; 2 – Приемопередатчик; 3 – Многофункциональный индикатор (МФИ).
5.
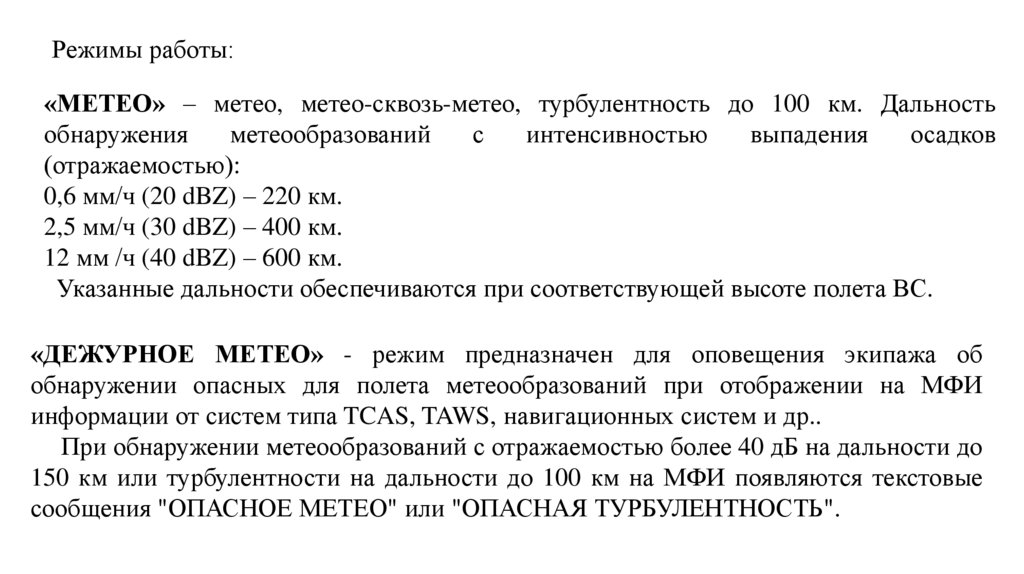
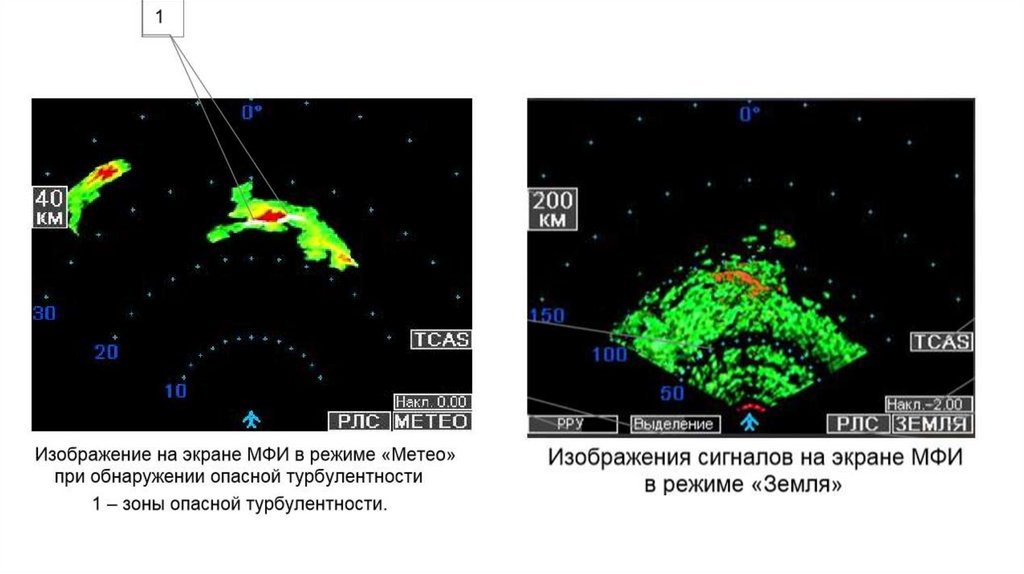
Режимы работы:«МЕТЕО» – метео, метео-сквозь-метео, турбулентность до 100 км. Дальность
обнаружения
метеообразований
с
интенсивностью
выпадения
осадков
(отражаемостью):
0,6 мм/ч (20 dBZ) – 220 км.
2,5 мм/ч (30 dBZ) – 400 км.
12 мм /ч (40 dBZ) – 600 км.
Указанные дальности обеспечиваются при соответствующей высоте полета ВС.
«ДЕЖУРНОЕ МЕТЕО» - режим предназначен для оповещения экипажа об
обнаружении опасных для полета метеообразований при отображении на МФИ
информации от систем типа TCAS, TAWS, навигационных систем и др..
При обнаружении метеообразований с отражаемостью более 40 дБ на дальности до
150 км или турбулентности на дальности до 100 км на МФИ появляются текстовые
сообщения "ОПАСНОЕ МЕТЕО" или "ОПАСНАЯ ТУРБУЛЕНТНОСТЬ".
6.
«ЗЕМЛЯ»-
обнаружение
радиолокационноконтрастных
ориентиров:
городов
(Великий Новгород) при H = 7 000 метров – 150-200 км;
судов (2 000 тонн) при H = 3 000 метров – 50-70 км;
береговой черты при H = 7 000 метров – 250 км;
дальность фона при H = 7 000 метров – 250 км;
разрешающая способность по дальности 100 – 600 метров;
разрешающая способность по азимуту 5 градусов;
«ВЕРТИКАЛЬНЫЙ ПРОФИЛЬ» - (только для серии 5) режим предназначен для
просмотра вертикального профиля метеообразований на выбранном направлении".
7.
8.
9.
10.
МЕТЕОНАВИГАЦИОННЫЙ РАДИОЛОКАТОР «ГРОЗА»Самолетный метеонавигационный радиолокатор "Гроза" предназначен для
навигационного обзора земной поверхности, обнаружение опасных для полета
гидрометеообразований (грозы, мощная кучевая облачность и т.д.), определение угла
сноса самолета.
В РЛС предусмотрено пять автономных режимов работы:
− режим «Готов». При установке переключателя режимов в положение «Готов»
все блоки радиолокатора подключаются к сети питания. Излучение СВЧ- энергии не
происходит, но радиолокатор находится в состоянии готовности к немедленной
работе;
11.
− режим работы «Земля». При работе радиолокатора в указанном режимесоответствующим выбором схемы и параметров отдельных его каналов и блоков
обеспечивается получение на индикаторе в полярных координатах "азимут –
дальность"
непрерывной
радиолокационной
карты
земной
поверхности,
расположенной впереди самолета в пределах азимутальных углов 90° в обе стороны
от его строительной оси (с учетом ширины диаграммы направленности).
− режим работы «Контроль». В режиме «Контроль» осуществляется проверка
работоспособности каналов: индикации, приемного и передающего.
12.
− режим "Метео". При работе радиолокатора в указанном режиме обеспечиваетсяполучение на
индикаторе
радиолокационного
в полярных координатах
изображения
воздушной
«азимут –
обстановки
в
дальность»
пространстве,
ограниченном азимутальными углами 90° в обе стороны от строительной оси
самолета и углами места 1,5…2° в обе стороны относительно плоскости горизонта
при установке регулятора «наклон» в нулевое положение. Для того чтобы сектор
обзора не изменял своего положения в пространстве при кренах самолета и также, что
особенно важно, при обходе грозовых зон, ось диаграммы направленности антенны
гиростабилизирована. Режим "Метео" позволяет определять опасные направления
полетов самолетов в сложных метеоусловиях;
13.
Режим работы «Земля»Формирование режимов
работы РЛС
14.
− режим работы «Снос». В режиме «Снос» производится измерение угла сносасамолета под действием ветра за счет использования амплитудной модуляции
отраженного от земной поверхности сигнала спектром вторичных доплеровских частот.
Частота модуляции будет минимальной, практически равной нулю, в тот момент, когда
проекция оси веерной диаграммы направленности антенны совпадает с линией пути
самолета.
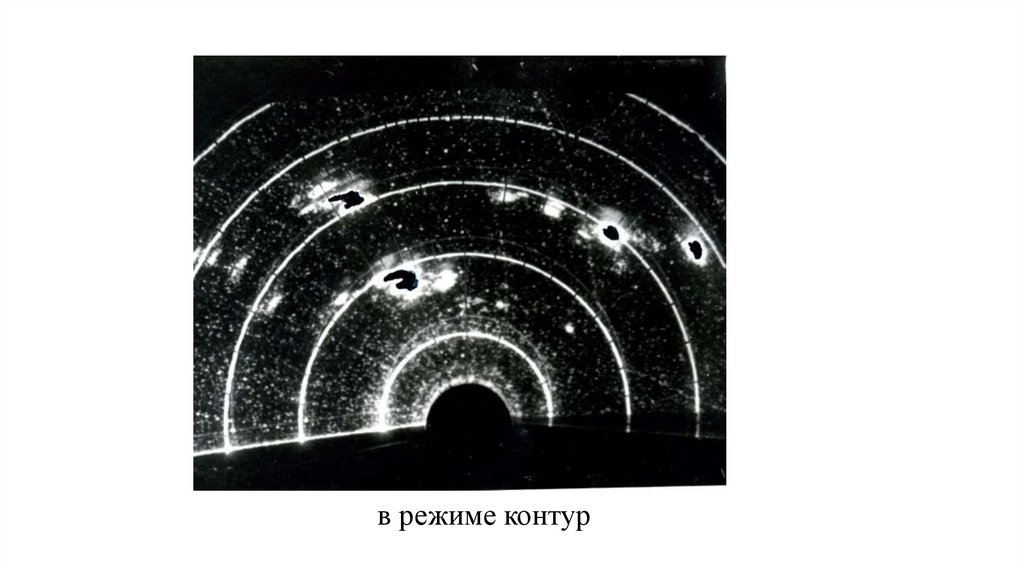
− режим работы «Контур». Указанный режим работы радиолокатора позволяет
выявлять внутри отражений от грозовых зон и кучево-дождевой облачности участки,
характеризующиеся большими диаметрами имеющихся в них капель, что
обуславливает их высокую отражающую способность. Благодаря специальному
построению схемы радиолокатора указанные участки представляются на экране
индикатора в виде затемненных областей, расположенных в ярко засвеченных
отметках от обнаруженных грозовых зон;
15.
Основные тактико-технические данные радиолокатораСредняя дальность наблюдения для высоты полета 6000 м и более составляет:
− водных поверхностей – 150…180 км;
− областных городов и промышленных центров – 250 км;
− особо крупных промышленных центров – 350 км
− дальность обнаружения грозовой и кучево-дождевой облачности – 200 км.
- Возможность ручного наклона оси диаграммы направленности антенны
относительно плоскости горизонта от 15 ± 1° до –10 ± 1°.
- Сектор азимутального обзора не менее 90° в обе стороны от строительной оси
самолета.
- Частота излучаемых колебаний – 9375 ± 5 МГц.
- Импульсная мощность излучаемых радиоимпульсов – не менее 9 кВт во всех
режимах.
- Величина тока, потребляемая радиолокатором: по цепи 115 В, 400 Гц – 4 А, по
цепи 36 В, 400 Гц – 1 А, по цепи 27 В – 5 А.
16.
Блок стабилизации и управленияАнтенный блок БРЛС Гроза;
размещен под носовым
обтекателем
фюзеляжа АН-26
17.
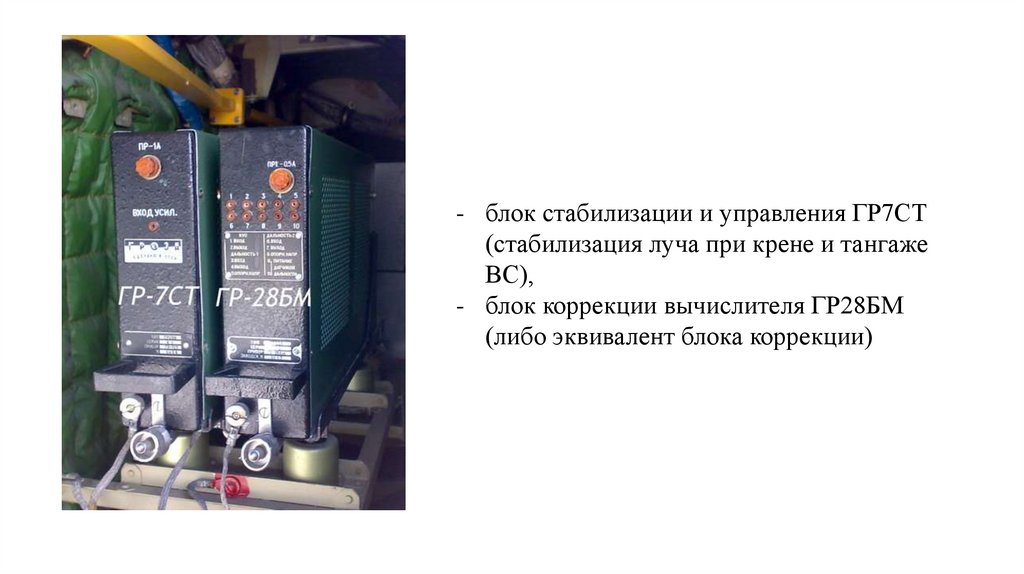
- блок стабилизации и управления ГР7СТ(стабилизация луча при крене и тангаже
ВС),
- блок коррекции вычислителя ГР28БМ
(либо эквивалент блока коррекции)
18.
- приемопередатчик ГР2БМ (либо ГР2В), передатчик маяка ГР2Д19.
Индикатор штурмана РЛС ГРОЗА-26Индикатор летчиков РЛС ГРОЗА-26
20.
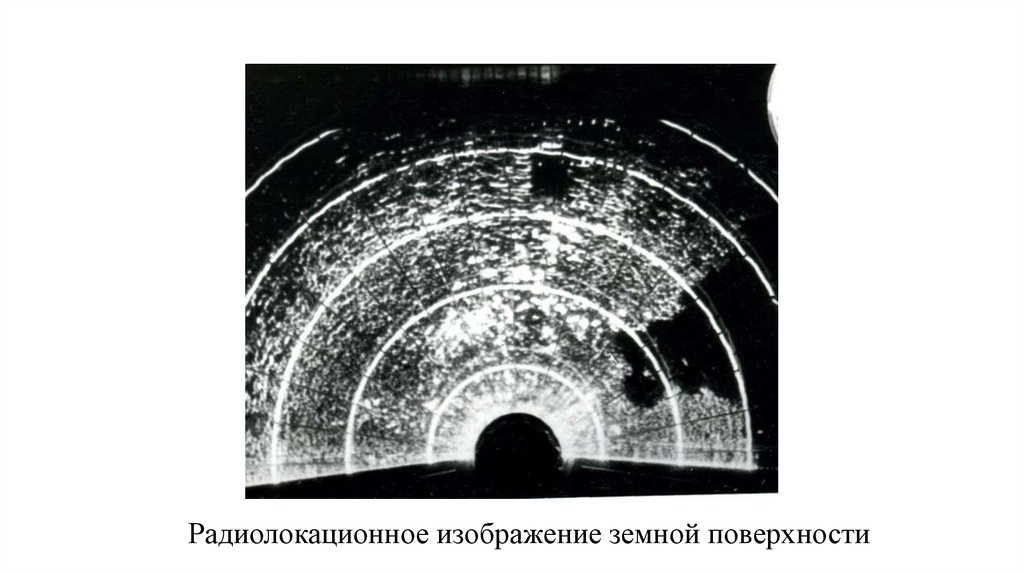
Радиолокационное изображение земной поверхности21.
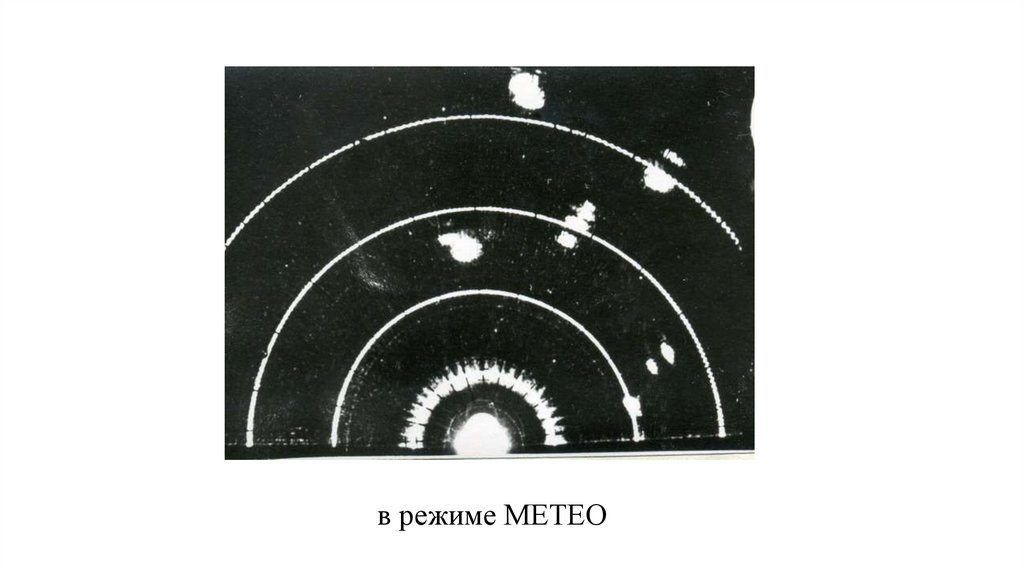
в режиме МЕТЕО22.
в режиме контур23.
Радиолокационная станция дециметрового диапазона «Воронеж-ДМ»Основные характеристики РЛС «Воронеж»:
- мощность потребления: «ДМ» - 0.7 МВт, «ВП» - до 10 МВт;
- дальность обнаружения : «ДМ» 2500-6000 километров, «ВП» - 6 тысяч километров;
- отработка целей: «ДМ» до 500 единиц.
Станция контролирует территорию от западного берега США до Индии. Антенное поле ровно в два раза
больше лехтусинского радара — 240 градусов и 6 секций вместо трёх, что позволяет контролировать
большую территорию. 23 мая 2012 года заступила на опытно-боевое дежурство.
24.
РЛС ДОН-2НОсновные характеристики РЛС:
-зона обзора по азимуту - 360 градусов
-зона обзора по углу места - 1-90 градусов
-дальность обнаружения космических объектов (размер 5 см) - до 2000 км
-количество одновременно сопровождаемых целей - 100.
25.
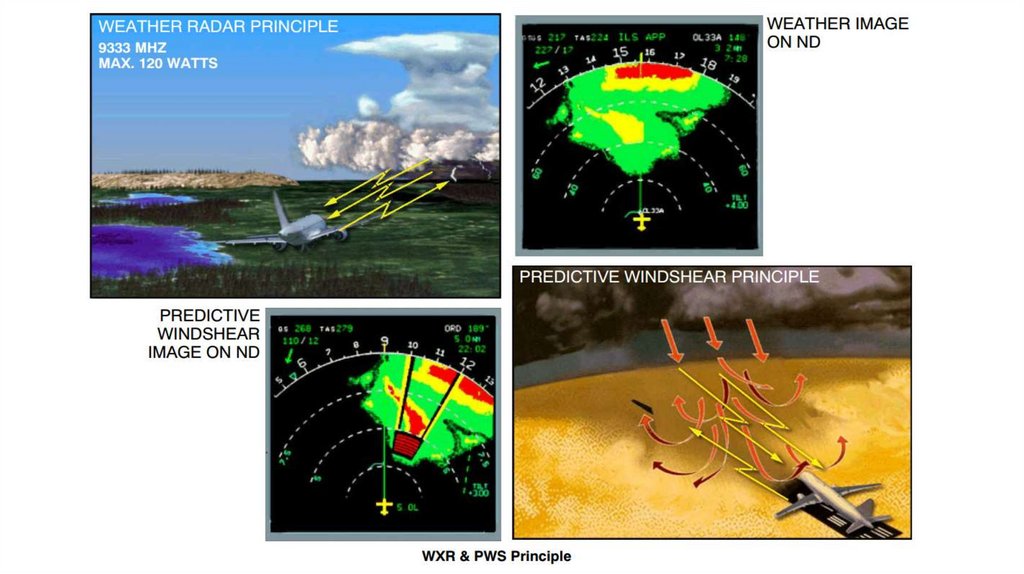
WEATHER RADAR SYSTEMВоздушное судно может быть оборудовано одним или двумя комплектами МНРЛС
(Collins
WXR-2100).
Данное
устройство
решает
задачу
определения
метео-
образований, сдвига ветра для предупреждения экипажа (в зависимости от компоновки
оборудования). Основные функции:
• обнаружение и локализация атмосферных возмущений в зоне сканирования
антенны: плюс или минус 90 град. осевой линии самолета и до 320 морских миль
перед самолетом;
• обнаружение областей
расстоянии до 40 нм;
турбулентности,
вызванных
• представление информации о рельефе местности;
• Определение сдвига ветра.
наличием
осадков
на
26.
27.
28.
Функция MultiScan (многократное сканирование)Система объединяет несколько радиолокационных сканирований с предварительно
выбранными углами наклона для обнаружения погоды с короткой, средней и
большой
дальности.
Результатом
является
наилучшее
обнаружение
метеообразований.
Данная
система
позволят
исключить
отраженные
сигналы
от
земной
поверхности, за счет оптимального угла наклона антенны, что обеспечивает пилотов
истинной информацией о состоянии погоды на расстоянии до 320 морских миль.
Оптимальный угол наклона антенны определяется с помощью информации:
- об высоте полета ВС (информация от радиовысотомера и ADR);
- об положении ВС (информация от IR);
- об рельефе местности (справочник).
29.
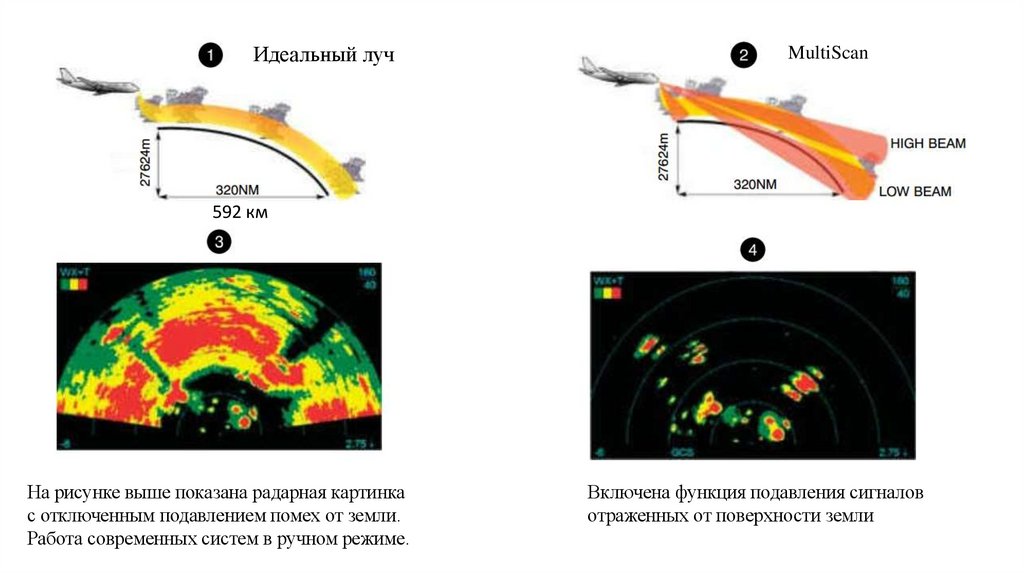
Идеальный лучMultiScan
592 км
На рисунке выше показана радарная картинка
с отключенным подавлением помех от земли.
Работа современных систем в ручном режиме.
Включена функция подавления сигналов
отраженных от поверхности земли
30.
Состав, расположение:31.
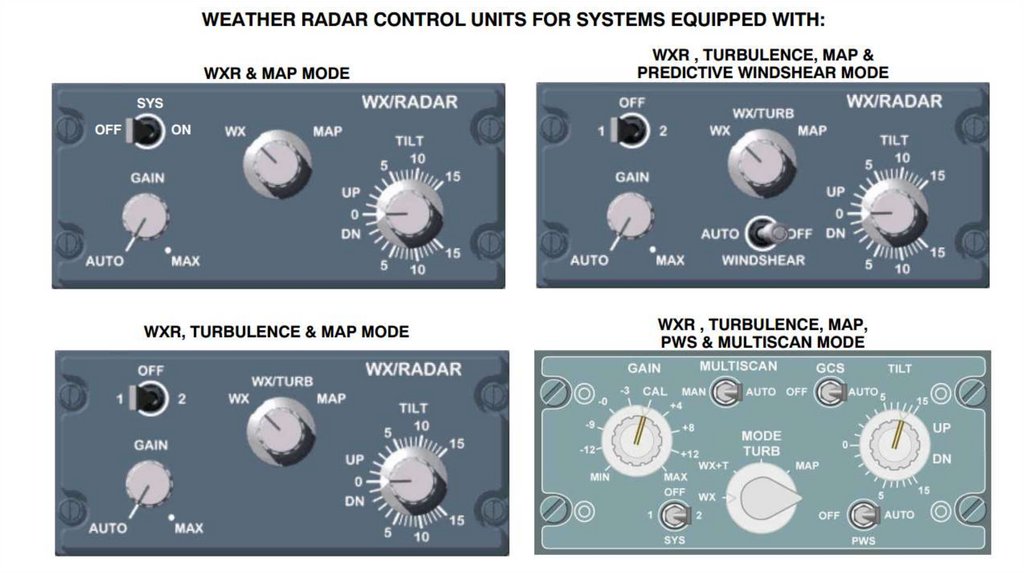
Существует 4 различные компоновки системы:• метеолокатор (определение метео) WXR;
• WXR + система определения турбулентности TURB;
• WXR + TURB + система предупреждения сдвига ветра (PWS);
• WXR + TURB + PWS +Multiscan System.
32.
33.
EFIS34.
35.
36.
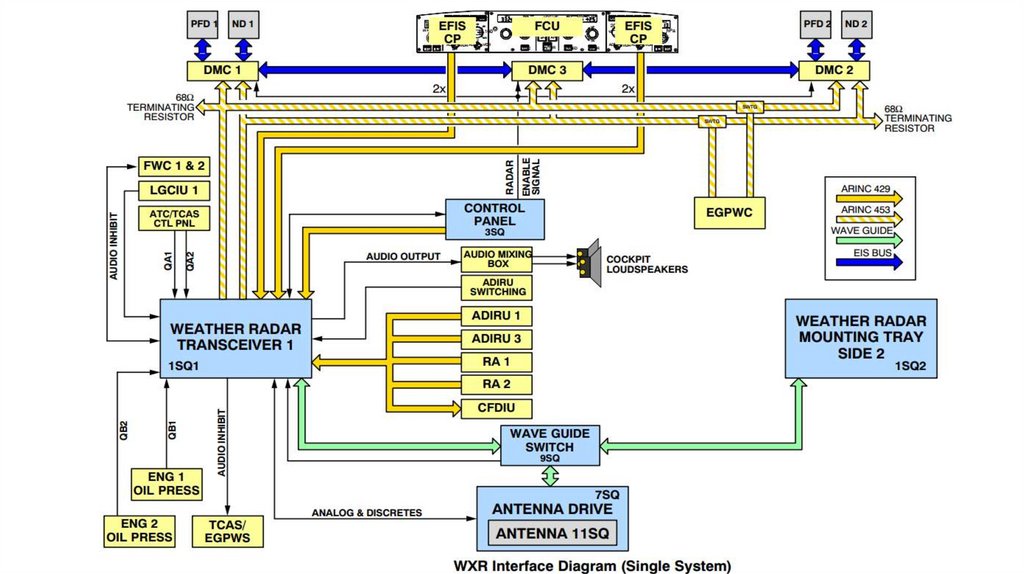
Основные компоненты системы:- антенна;
- Волноводный переключатель;
- механизм привода и стабилизации антенны;
- Волновод;
- 2 приемопередатчика;
- Пульт управления (Weather Radar Control Unit).
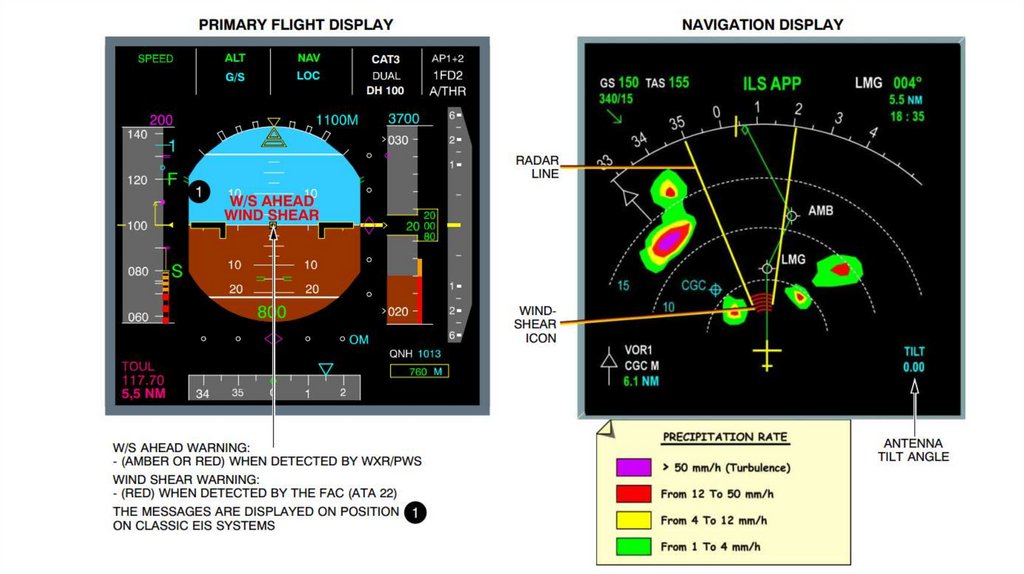
Предупреждения о сдвиге ветра поступают на PFD, звуковое предупреждение
поступают в блок Audio Mixing Box и затем в гарнитуру.
ADIRUs передает данные позволяющие стабилизировать антенну и вычислить
сдвиг ветра.
Радио высотомер (RA) передает измеренную высоту, которая используются для
автоматической активации функции сдвига ветра.
Каждый провод шины данных заканчивается на одном конце резистором с низким
сопротивлением (68 Ом), чтобы избежать возврата сигнала.
37.
Centralized Fault Interface Display Unit (CFDIU) – тестирование оборудования;Enhanced Ground Proximity Warning System (EGPWS) – усовершенствованная
система предупреждения столкновения земли получает сигналы от PWS, чтобы
определить наиболее приоритетные сообщения:
• WXR/PWS warning,
• WXR/PWS caution,
• Ground Proximity Warning System (GPWS) terrain warning,
• GPWS terrain caution.
Landing Gear Control & Interface Unit (LGCIU) – передает сигналы
определяющие режим полета (земля- полет) для формирования
оборудованием сообщения:
- GO AROUND, WINDSHEAR AHEAD in approach;
- WINDSHEAR AHEAD, WINDSHEAR AHEAD at take-off .
38.
Если МНРЛС оснащено функцией PWS, то обеспечиваются квалификаторы двухтипов A и B необходимые для автоматической активации функции прогнозирования
сдвига ветра (PWS).
А: QA1 и QA2 индицируется положение переключателя AUTO / ON / STBY
пульта управления системами Air Traffic Control (ATC)/Traffic Collision Avoidance
System (TCAS). Квалификатор А действителен, когда выбрано AUTO или ON.
B: QB1 и QB2. Квалификатор B действителен при работающем двигателе
(высокое давление масла).
Функция PWS автоматически активируется ниже 2300 футов RA, и один из каждого
квалификатора
A
действительными.
и
один
из
каждого
квалификатора
B
должны
быть