





















 Электроника
ЭлектроникаПохожие презентации:



")
")




. Общие сведения. (Лекция 6)")
Модели систем возбуждения синхронных машин
1. Модели систем возбуждения синхронных машин
2.
ЭДС, развиваемая синхронным генератором, определяется выражениемE kf
которое показывает, что ЭДС Е, а
следовательно, и напряжение на шинах
генератора U находятся в прямой зависимости
от магнитного потока Ф, который создается
обмоткой ротора генератора, обтекаемой постоянным током. При вращении ротора
генератора магнитный поток Ф пересекает
витки обмотки статора w с частотой
и
индуцирует в них ЭДС E.
3.
Ток в обмотке ротора и напряжение,под
воздействием
которого
он
проходит,
называются
током
и
напряжением возбуждения генератора.
if
СВ
G
ТА
Uf
ТV
АРВ
Энергосистема
4.
К системе возбуждения генератораотносятся
обмотка
ротора,
возбудитель, регуляторы, с помощью
которых можно изменять напряжение и
ток возбуждения.
5.
Напряжениена
выходе
системы
возбуждени
и
ток
возбуждения
изменяются под действием сигнала,
поступающего от АРВ. Требуемый вид
этого сигнала зависит от технического
исполнения системы возбуждения. АРВ
представляет собой замкнутую систему
автоматического
регулирования,
управляемую на основе обработки по
определенному
алгоритму
режимных
параметров,
получаемых
от
трансформаторов напряжения и тока.
6.
Напряжение и ток ротора, прикоторых
генератор
работает
с
номинальной
мощностью,
номинальным напряжением статора и
номинальным,
также
называются
номинальными.
Изменение
этих
величин
для
поддержания необходимого уровня
напряжения
статора
генератора
называется
регулированием
возбуждения.
7.
Быстрое увеличение возбуждениясверх
номинального
значения
называется
форсировкой
возбуждения. При этом наибольшие
возможные значения напряжения и
тока
ротора,
которые
может
обеспечить
возбудитель,
называются потолком возбуждения.
Отношение напряжения (тока) ротора
при форсировке к номинальным
значениям — кратность форсировки
возбуждения.
8.
Основные функции• Поддержание напряжения в определенных
точках энергосистемы, чаще всего на
выводах генератора. Может также
ставиться и решаться задача обеспечения
изменения напряжения в некоторой точке
по определенному закону в зависимости от
других режимных параметров, например, от
тока. Этим обеспечивается участие
генераторов вместе с другими
техническими средствами в решении
задачи управления режимом работы
электрических сетей по напряжению и
реактивной мощности.
9.
Основные функцииАРВ в большей или меньшей степени
способствует повышению статической и
динамической устойчивости
параллельной работы генераторов.
• АРВ в большей или меньшей степени
способствует повышению статической
и динамической устойчивости
параллельной работы генераторов.
10.
Системы возбуждения синхронныхмашин должны иметь:
• необходимую мощность источников
возбуждения
и
диапазон
его
изменения
в
зависимости
от
параметров
режима
синхронной
машины;
• высокую
скорость
нарастания
ротора
в
условиях
аварийных
нарушений режима в энергосистемах,
что
обеспечивает
быструю
мобилизацию резервов реактивной
мощности
и
предотвращает
нарушение
устойчивости
параллельной работы.
11.
• Система возбуждения генераторадолжна обепечить не менее чем
двухукратную форсировку
возбуждения и скорость нарастания
напряжения не менее двух единиц
возбуждения в секунду (ед. возб/с),
где за единицу возбуждения
принимается номинальное
напряжение.
12. Виды АРВ
ВсеАРВ,
применяемые
на
синхронных
генераторах,
различаются
по
параметру,
на
который они реагируют, по способу
воздействия на систему возбуждения
генератора и подразделяются на три
группы.
13.
Первая группа• Электромеханические АРВ, которые
реагируют
на
отклонение
напряжения генератора от заданного
значения (уставки) и воздействуют
на изменение сопротивления в цепи
обмотки возбуждения возбудителя.
14.
Вторая группаЭлектрические
АРВ.
Эти
АРВ
реагируют
на
отклонение
напряжения или тока генератора от
заданного
значения
и
подают
дополнительный выпрямленный ток
в обмотку возбуждения возбудителя
от внешних источников питания
(трансформаторов тока, напряжения
или собственных нужд).
15.
Третья группаАРВ, применяемые в основном с
выпрямительными
системами
возбуждения:
высокочастотной,
тиристорной, бесщеточной. Они не
имеют
собственных
силовых
органов
(внешних
источников
питания),
а
только
управляют
работой возбудителей.
16.
Дляпреодоления
влияния
электромагнитной
инерции
цепи
возбуждения необходимо, чтобы действие
регулятора было пропорционально не
только U но также скорости изменения U.
Если, например, напряжение U начало
резко и быстро падать и поэтому
абсолютное значение dU/dt велико, то
регулятор немедленно, когда U еще не
успело достичь заметной величины, дает
сильный импульс на увеличение if.
Желательно также, чтобы регулятор
возбуждения реагировал на производные
других величин, характеризующих режим
работа синхронного генератора.
17.
Регуляторы, которые реагируют нетолько на величины отклонения
определенных параметров, но и на
величины их производных во
времени, называются регуляторами
сильного действия.
18. Типы систем возбуждения и их особенности
19.
Системавозбуждения
предназначена для питания обмотки
возбуждения синхронной машины
постоянным
током
и
соответствующего
его
регулирования, она является одним
из
наиболее
ответственных
элементов генератора.
20.
Системавозбуждения
характеризуется:
1. номинальным напряжением Ufном и
током возбуждения Ifном,
2. номинальной
мощностью
возбуждения Рfном = Ufном Ifном, которая
составляет 0,2 – 5% от номинальной
мощности машины,
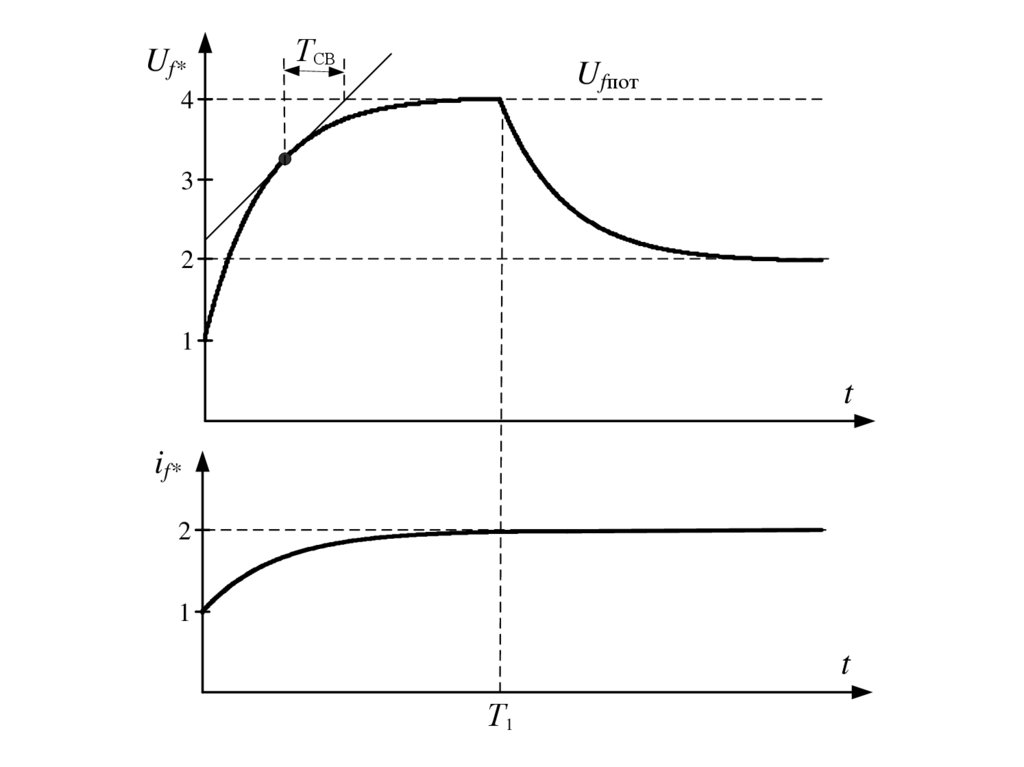
3. скоростью нарастания напряжения,
которая характеризуется постоянной
времени ТСВ.
4. скоростью развозбуждения.
21.
5. форсировочнойспособностью
(кратностью форсировки) Кf, под
которой
понимают
отношение
наибольшего
установившегося
(потолочного)
напряжения
Ufпот
возбудителя
к
номинальному
напряжению
Ufном.
Кратность
форсировки
гидрогенераторов
находится в пределах Кf = 2 – 4,
турбогенераторов Кf = 2 – 2,5.
22.
Uf*ТСВ
Ufпот
4
3
2
1
t
if*
2
1
t
Т1
23.
В целом, быстродействие системывозбуждения зависит от постоянных
времени обмоток возбуждения
генератора, возбудителя и
автоматического регулятора
возбуждения (АРВ), который
является неотъемлемой частью
системы возбуждения
24. Системы возбуждения:
• системы независимого возбуждения, ккоторым
относятся
все
электромашинные
возбудители
постоянного и переменного тока,
соединенные с валом возбуждаемой
машины.
Работа
таких
систем
возбуждения не зависит от напряжения
генератора или сети,
• системы зависимого возбуждения, к
которым
относятся
системы
возбуждения, получающие питание от
выводов
генератора
через
специальные
трансформаторы
и
выпрямители.
Работа
систем
зависимого возбуждения зависит от
напряжения генератора или сети.
25. Система независимого возбуждения с управляемым тиристорным выпрямителем
К повышающемутрансформатору
GE
Щ LG
G
Щ
VSФ
VSР
26. Система зависимого возбуждения с управляемым тиристорным выпрямителем
К повышающемутрансформатору
Т
Щ LG
G
Щ
ST
VSР
VSФ
АНВ
от ТСН
27.
Недостатком схемы самовозбужденияявляется зависимость напряжения,
подаваемого на выпрямители, от
режима работы главного генератора.
Система
самовозбуждения
с
управляемыми
тиристорными
выпрямителями
характеризуется
постоянной времени ТСВ = 0,03 – 0,05 с.
28.
Кдостоинствам
тиристорного
возбуждения также относятся высокое
быстродействие и высокая кратность
форсировки, для чего достаточно иметь
напряжение источника питания на
заданную кратность форсировки. При
полном открытии выпрямителей это
напряжение практически мгновенно
прикладывается к обмотке возбуждения
генератора Г. В нормальном режиме
выпрямители открыты не полностью,
поэтому
к
обмотке
возбуждения
подводится номинальное напряжение
возбуждения.
29. Система возбуждения с генераторами постоянного тока
GЩ
LGE2 LGE1
Щ
LG
LGE
GE
RШ
К
ТА
ТV
АРВ
30.
Как правило, вал якоря возбудителяи подвозбудителя соединен с валом
ротора
генератора
непосредственно, что обеспечивает
высокую
надежность
работы
системы возбуждения.
Система возбуждения с
генераторами постоянного тока
характеризуется постоянной
времени ТСВ = 0,3 – 0,5 с.
31. Высокочастотная система возбуждения
ЩVS
К повышающему
трансформатору
G
LG
If
GEA
ТV
LGE
GE
If1
LGE1
R1
If2
LGE2
R2
Форсировочный
канал
АРВ
рабочий канал
ТА
32.
Общим недостатком всехрассмотренных выше систем
возбуждения является необходимость
использовать контактные кольца
(скользящий контакт) для передачи
постоянного тока на вращающийся
ротор
33. Бесщеточная система возбуждения
ТфТр
GEA
GE
VSф
VSр
LG
G
ТV
LGE
RД
ТА
К повышающему
трансформатору
АРВ
рабочий канал
Форсировочный
канал
34.
Возбудитель в таких системахпредставляет собой обращенный
синхронный генератор (ОГ), соединенный
последовательно с валом генератора (Г).
Обмотки возбуждения возбудителя
расположены на статоре, а обмотки
переменного тока – на роторе.
Выпрямители (ВВ) укрепляются на дисках,
расположенных на валу возбудителя и
вращаются вместе с ним.
35.
Основные количественныехарактеристики систем
возбуждения и АРВ,
учитываемые в
математической модели
36.
Модели систем возбужденияиспользуются при расчетах переходных
процессов всегда, кроме тех случаев, когда
генератор по своему расположению в
энергосистеме и особенностям решаемой
задачи может быть представлен постоянной
ЭДС. Основным требованием к модели
системы возбуждения, включая АРВ,
является правильность воспроизведения
влияния АРВ на переходные процессы в
энергосистеме. Отражать в расчетах
действие отдельных каналов АРВ
необходимо лишь в той мере, в какой это
обеспечивает выполнение указанного
требования.
37. Функциональная схема автоматического регулирования напряжения генератора
Измерительный (Изм.),усилительный (У), исполнительный
(Исп.) , обмотка возбудитель (Возб.),
генератор (Г)
38.
На вход измерительного элемента подаютсязаданное напряжение U0, которое должно
поддерживаться на генераторе, и фактическое
напряжение генератора U (последнее позволяет
замкнуть систему регулирования). Фактическое
напряжение U действует встречно с заданным
напряжением U0, вследствие чего в измерительном
элементе происходит измерение разности этих
напряжений. При отклонении фактического
напряжения генератора от заданного измерительный
элемент подает воздействие через усилительный и
исполнительный элементы на систему возбуждения.
Происходит корректировка возбуждения, и
напряжение генератора восстанавливается до
заданного значения.
39.
Системы возбуждения и АРВ при расчетахпереходных процессов в энергосистемах
обычно описываются двумя
дифференциальными уравнениями для учета
запаздывания в АРВ и в возбудителе.
Уравнения составляются таким образом,
чтобы в них были представлены основные
каналы регулирования, характерные для
различных существующих систем
возбуждения. Тогда, задавая нужные
коэффициенты усиления и постоянные
времени, можно получить модель требуемой
системы возбуждения с АРВ нужного вида.
40. Основные функции АРВ СД
• автоматическое регулирование тока возбуждения по алгоритмуАРВ СД;
• релейная форсировка возбуждения;
• ограничение тока ротора при форсировке на двукратном уровне;
• автоматическая разгрузка СГ при перегрузке по току ротора и
реактивному току статора;
• изменение заданного напряжения при синхронизации СГ;
• ограничение снижения возбуждения при потреблении
реактивной мощности;
• уравнивание реактивных мощностей параллельно работающих
генераторов (при групповом управлении возбуждением);
• регулирование по отклонению тока ротора в процессе выбега
турбогенераторов атомных электростанций;
• защита генератора от повышения напряжения при сбросах
нагрузки.
41.
Основная цель использования АРВСД - повысить предел
передаваемой мощности по линиям электропередачи по
условиям устойчивости СГ.
Для АРВ СД действия характерно следующее:
упреждающее действие регулятора за счет использования в
алгоритме регулирования воздействий по производным
режимных параметров (напряжения, тока, частоты);
высокое быстродействие регулятора и возбудителя;
сложный алгоритм регулирования, содержащий регулирующие
воздействия по нескольким режимным параметрам;
большие значения коэффициентов передачи регулятора по
каждому из регулирующих воздействий.
Регулирование возбуждения сильного действия
используется на СГ либо с тиристорной, либо с
быстродействующей бесщеточной системами возбуждения.
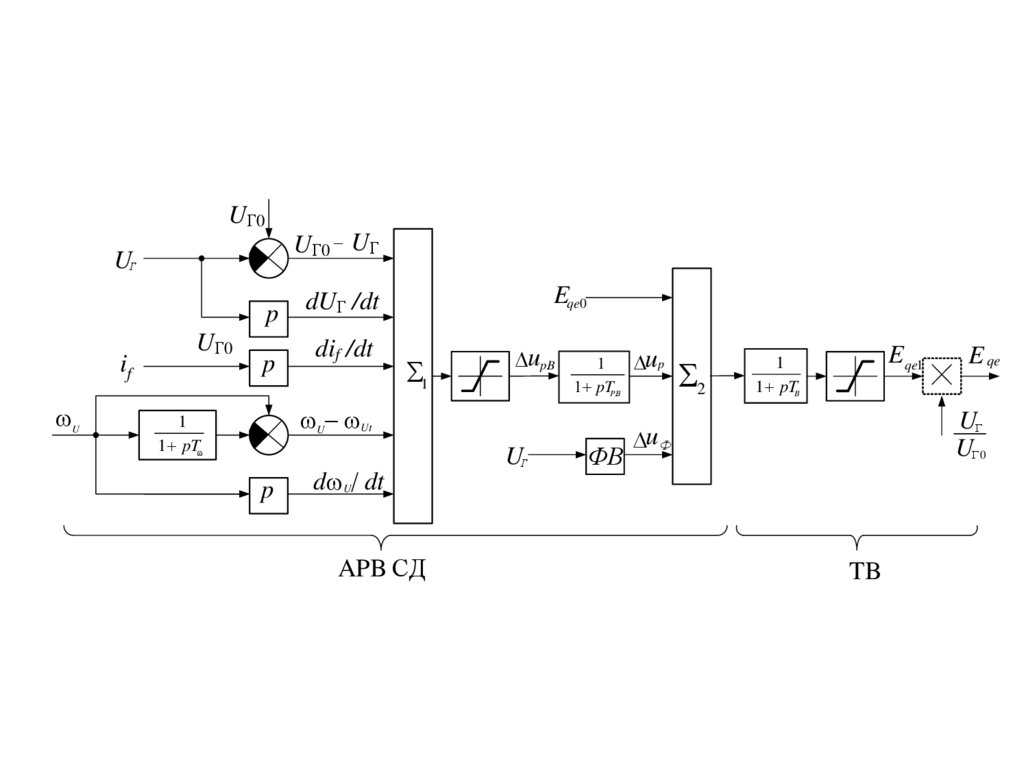
42.
UГ0UГ0 UГ
UГ
p
if
U
UГ0
p
Eqe0
dUГ /dt
dif /dt
1
upB.
1
1 pTPB..
U Ut
1
1 pT
p
d U dt
APB СД
UГ
ФВ
up
2
E qe1
1
1 pTB
E qe
UГ
UГ 0
u Ф
TB
43.
В регуляторах возбуждения сильногодействия в качестве регулирующих
воздействий используются:
• отклонение напряжения от заданного
значения;
• первая производная напряжения
• первая и вторая производные тока
линии электропередачи
• изменение и первая производная
частоты:
44.
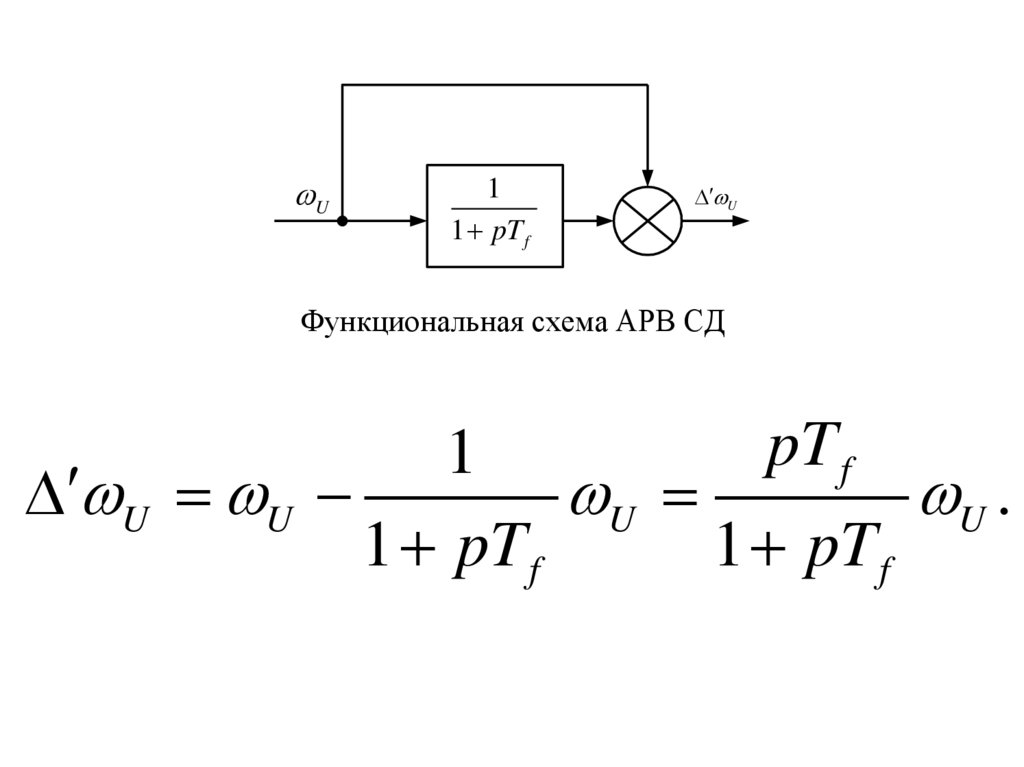
U1
1 pT f
U
Функциональная схема АРВ СД
pT f
1
U U
U
U .
1 pT f
1 pT f
45.
Eqe 0UГ
1
U Г 0 f ( U )
1
1 pTP . B .
u p
2
if if 0
Eqe
1
1 pTB
p
dEqe
Корректор напряжения
dt
if 0
if
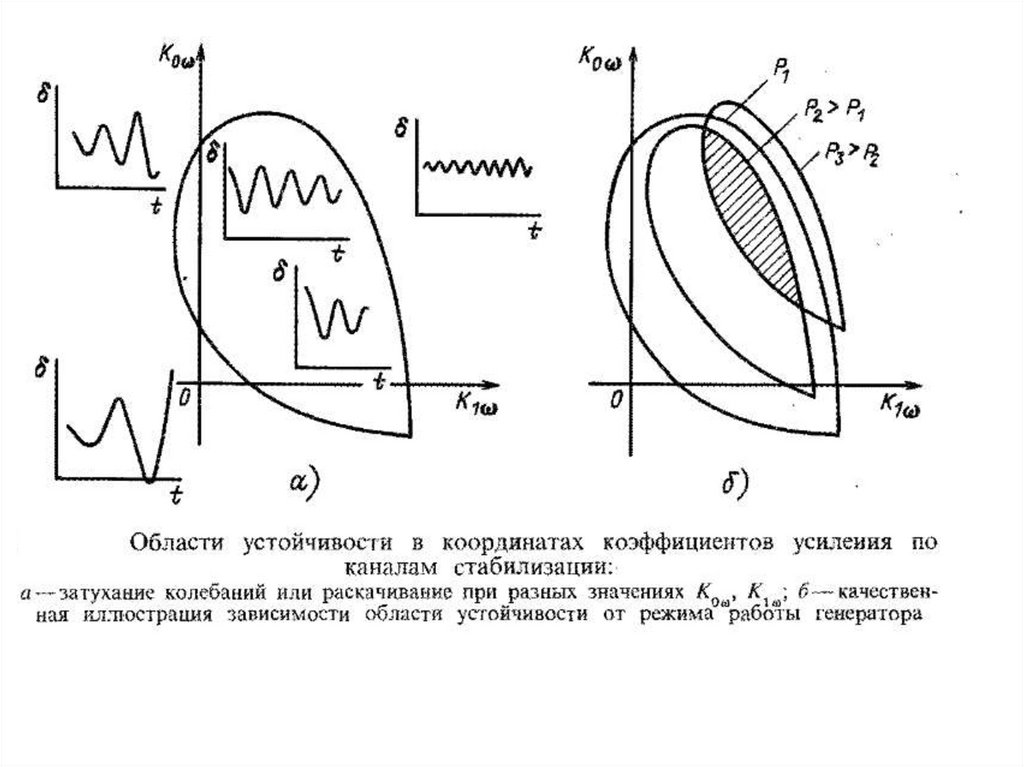
46. Критерии адекватности модели системы возбуждения и АРВ
• Ограничение уровня возбуждения сверху иснизу по току возбуждения и по напряжению
возбуждения.
• Скорость нарастания напряжения
возбуждения при форсировке и скорость
уменьшения напряжения возбуждения при
расфорсировке.
• Влияние АРВ на демпфирование
электромеханических колебаний (включая и
устранение возможного нарушения
колебательной устойчивости
(самораскачивание)).
47.
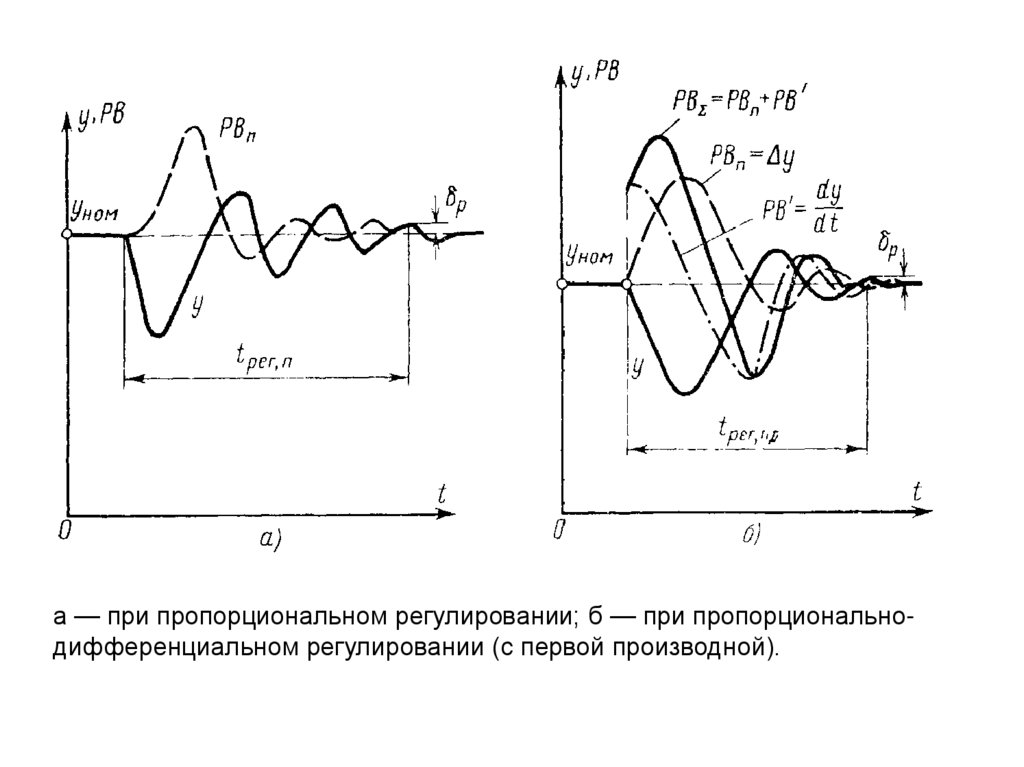
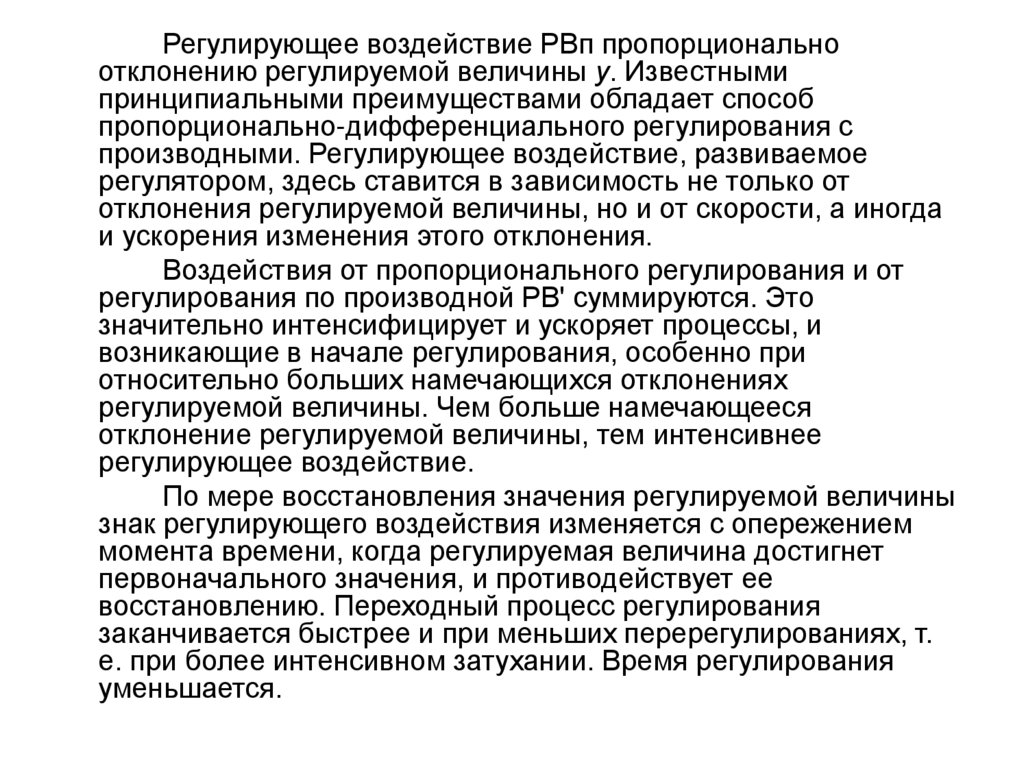
а — при пропорциональном регулировании; б — при пропорциональнодифференциальном регулировании (с первой производной).48.
Регулирующее воздействие РВп пропорциональноотклонению регулируемой величины у. Известными
принципиальными преимуществами обладает способ
пропорционально-дифференциального регулирования с
производными. Регулирующее воздействие, развиваемое
регулятором, здесь ставится в зависимость не только от
отклонения регулируемой величины, но и от скорости, а иногда
и ускорения изменения этого отклонения.
Воздействия от пропорционального регулирования и от
регулирования по производной РВ' суммируются. Это
значительно интенсифицирует и ускоряет процессы, и
возникающие в начале регулирования, особенно при
относительно больших намечающихся отклонениях
регулируемой величины. Чем больше намечающееся
отклонение регулируемой величины, тем интенсивнее
регулирующее воздействие.
По мере восстановления значения регулируемой величины
знак регулирующего воздействия изменяется с опережением
момента времени, когда регулируемая величина достигнет
первоначального значения, и противодействует ее
восстановлению. Переходный процесс регулирования
заканчивается быстрее и при меньших перерегулированиях, т.
е. при более интенсивном затухании. Время регулирования
уменьшается.
49. Компаундирование
ДОВВ – дополнительная обмотка возбуждения возбудителя, ОВВ – обмоткавозбуждения возбудителя, В – возбудитель, ОВ – обмотка возбуждения
генератора
50.
• При компаундировании регулятор напряжениядолжен корректировать те отклонения напряжения, с
которыми не справляется система
компаундирования. По этой причине такой регулятор
называют корректором. Сочетание
компаундирования с коррекцией напряжения широко
применяется на синхронных генераторах с машинной
системой возбуждения.
• Компаундирование есть не что иное, как коррекция
системы регулирования напряжения по нагрузке,
которая выполняется для коррекции динамических
свойств АРВ.
• Данное сочетание использования компаундирования
и корректора напряжения называется
компаундирование генератора с коррекцией по
напряжению.
51. ТИПЫ АРВ В МУСТАНГ
• тип 1:независимое тиристорное возбуждение, или
тиристорная система возбуждения с сериесными
трансформаторами, или бесщеточная СВ с вращающимися
тиристорами; АРВ сильного действия (АРВСД);
• тип 2:
тиристорное самовозбуждение без сериесных
трансформаторов; АРВСД;
• тип 3:
бесщёточная СВ с вращающимися
диодами; АРВСД;
• тип 4:
высокочастотная СВ без блока сильной
стабилизации (БСС); АРВ типа корректора напряжения;
• тип 5:
то же, но с БСС;
• тип 6:
электромашинное возбуждение с возбудителем
постоянного тока; компаундирование и корректор напряжения;
релейная форсировка напряжения;
• тип 0:
отсутствие АРВ, Eqe = const.
52. Ограничение уровня возбуждения
Ограничение по напряжению навходе регулятора UРВ. Регулирование
осуществляется относительно начального
значения напряжения возбуждения Еqe0,
которое рассчитывается по параметрам
предшествующего
установившегося
режима
U PBmin U PB Eqe 0 U PBmax .
53.
Ограничениевозбуждения
по
напряжению
Emin Eqe1 Emax .
Заданные
ограничения
по
напряжению возбуждения выполняются
только в том случае, если ток возбуждения
находится в пределах заданных для него
ограничений
Eq min Eq Eq max .
54.
Eqe max ï ðè Eq Eq max c.â.1, 2,3,Emax Eq max ï ðè Eq Eq max c.â.1, 2,3,
6.
4,5,
c.â.
E
max
qe
Eqe min ï ðè Eq Eq min c.â.1, 2,3,
Emin Eq min ï ðè Eq Eq min c.â.1, 2,3,
6.
4,5,
c.â.
E
min
qe
55.
Форсировкавозбуждения
56.
В схемах устройств форсировки возбуждениясинхронных машин используют в качестве
измерительного органа реле минимального
напряжения.
Измерение напряжения производят на выводах
обмотки статора или в другой, заранее
намеченной точке сети.
При снижении напряжения до значения уставки
срабатывания реле минимального напряжения
этим реле включается контактор форсировки.
Производится необходимое воздействие на
систему возбуждения синхронной машины, в
результате увеличивается ток возбуждения до
предельно допустимого значения по условиям
работы генератора.
57.
Например, для турбогенераторов серии ТВФкратность форсировки 200% допускается в
течение 30 с, 170% —в течение 60 с, 120% — в
течение 240 с, а 106% — в течение 1 ч. Для
турбогенераторов
типов
ТВВ
и
ТТВ
двукратная форсировка допускается в течение
20 с, а полуторакратная ограничивается
временем 1 мин.
Для машин с естественным охлаждением
дежурный
персонал
обязан
устранить
причину, вызвавшую работу устройства
форсировки
возбуждения, не позднее чем
через 1 мин после срабатывания устройства.
Для этого предусматривается сигнализация.
58.
После того как напряжение в точкеизмерения восстановилось до
значения, при котором размыкаются
контакты реле форсировки,
соответствующие устройства
возвращаются в исходное положение.
Возврат может быть осуществлен или
мгновенно, или с некоторой
задержкой.
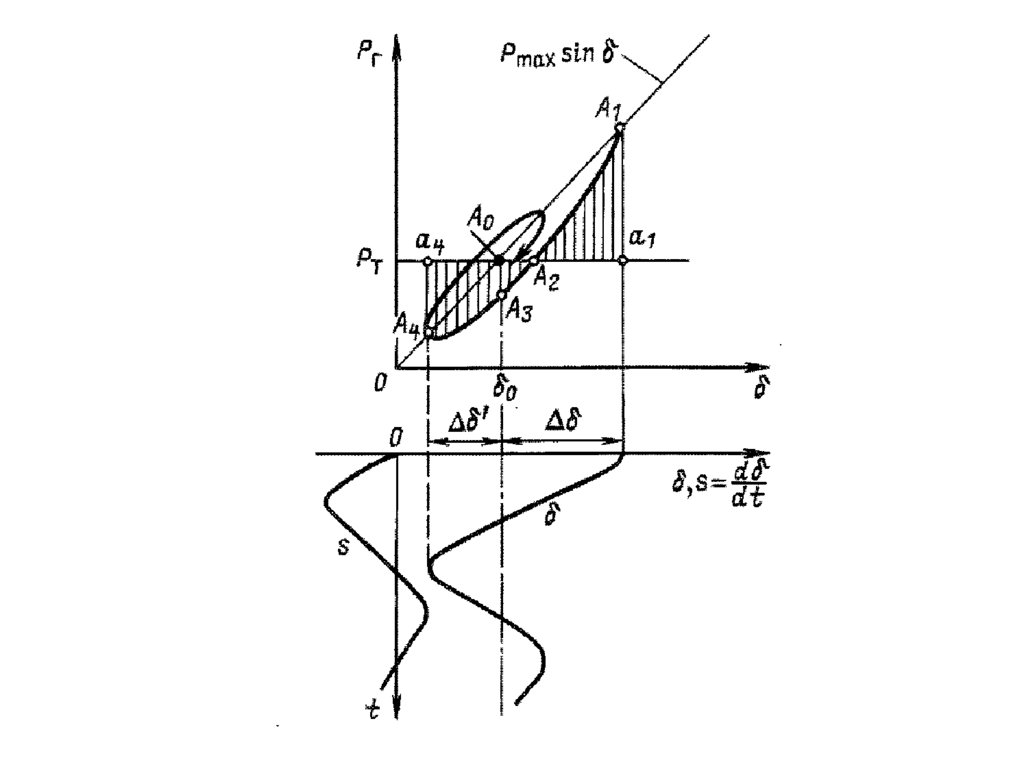
59. Самораскачивание генератора
Одним из основных факторов, обеспечивающихзатухание колебаний синхронных машин, является их
асинхронный момент, который при малых изменениях
круговой
частоты
вращения
ротора
R
пропорционален скольжению s:
s
R í î ì d
í î ì
dt
При качаниях, кроме синхронной мощности
генератора Pmax sin имеется и асинхронная мощность
kä
d
, соответствующая асинхронному моменту. При
dt
малых скольжениях эту мощность можно считать
пропорциональной s.
Pã Pmax sin kä
d
dt
60.
61.
62.
Закон регулирования АРВ ПДu f u f 0 K 0u (U 0 U ã )
где U 0 — уставка АРВ по напряжению; K 0u коэффициент регулирования по отклонению
напряжения, u f 0 постоянная составляющая.
Снижение U ã вызывает увеличение разности U 0 U ã ,
следовательно увеличение u f
63.
64.
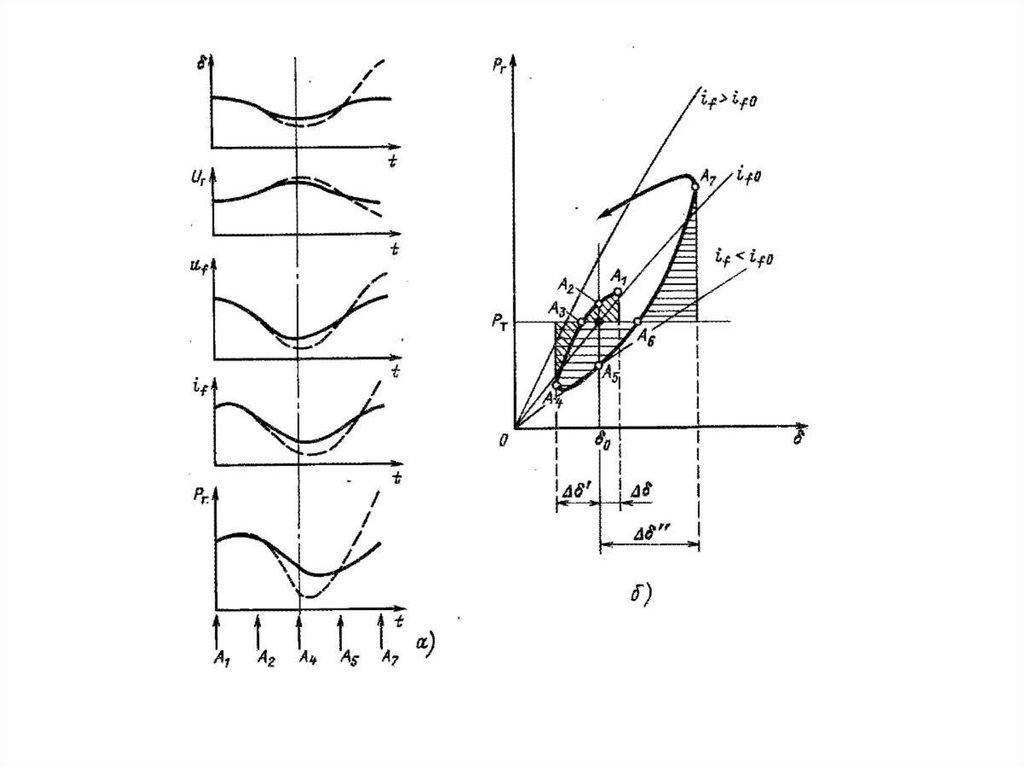
Хорошее демпфирование колебаний при высокомбыстро действии регулирования напряжения дают
АРВ-СД.
При
качаниях
введение
производных
позволяет изменить сдвиг по фазе между i f ( t ) и ( t)
так, чтобы при уменьшении s до значения 0
мощность генератора оказывалась меньше, чем Р т .
Регулирование
обеспечивает
асинхронному моменту.
эффект,
подобный
65.
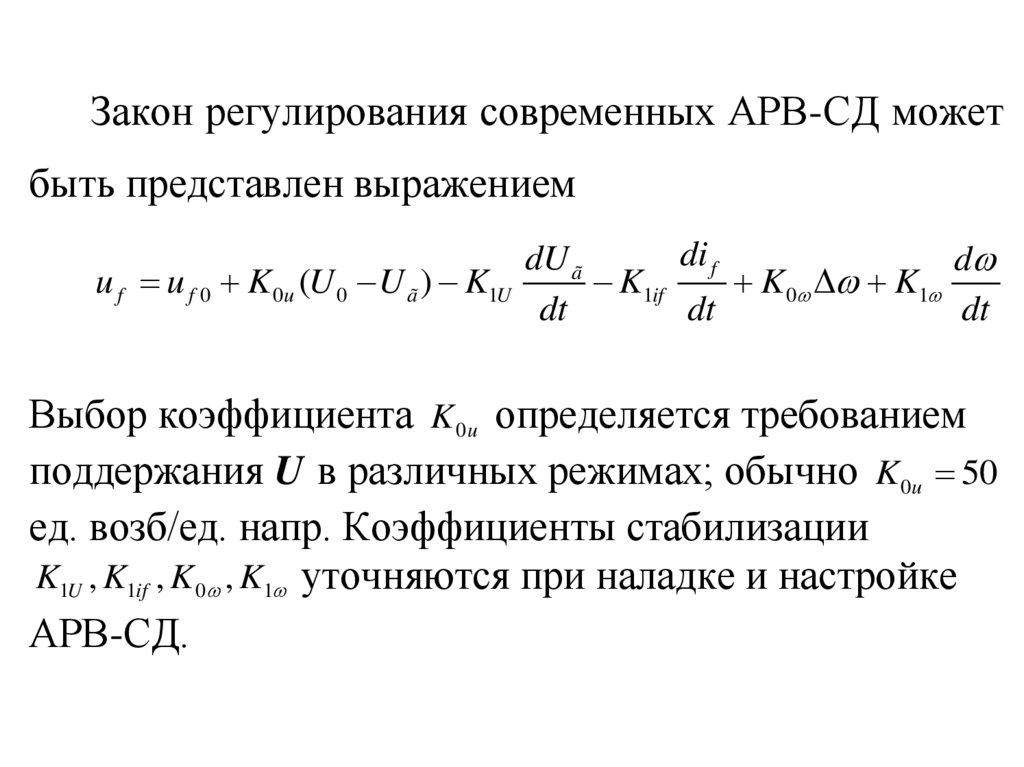
Закон регулирования современных АРВ-СД можетбыть представлен выражением
di f
dU ã
d
u f u f 0 K 0u (U 0 U ã ) K1U
K1if
K 0 K1
dt
dt
dt
Выбор коэффициента K 0u определяется требованием
поддержания U в различных режимах; обычно K0u 50
ед. возб/ед. напр. Коэффициенты стабилизации
K1U , K1if , K 0 , K1 уточняются при наладке и настройке
АРВ-СД.