 Военное дело
Военное делоПохожие презентации:








")
")
Автоматическая доставка грузов. Задача №7
1.
Задача №7Автоматическая
доставка грузов
Разработчик задачи:
Отдел Автоматизации Экспериментов
института №3 МАИ
2.
Задача №7 – Описание задачиОписание задачи
Своевременная доставка грузов в зону
ЧС требует решения целого ряда задач.
Одна из этих задач – логистическая: как
и куда нужно лететь, где сбросить груз,
в
каком
порядке
осуществлять
доставку.
2/9
3.
Задача №7 – Постановка задачиПостановка задачи и критерии оценки
Формулировка задачи:
Разработайте программу на языке Python,
реализующую
автоматическое
траекторное
управление полётом БЛА и автономную доставку
двух грузов в зону ЧС с использованием системы
технического зрения.
Входные данные: Симулятор полёта БЛА;
навигационные параметры БЛА в текущий момент
времени; видеопоток данных с бортовой камеры
БЛА; недоработанное решение 3й задачи.
Выходные данные: Программа на Python,
реализующая автоматический расчёт координат
местоположений
точек
доставки
груза
с
использованием алгоритмов технического зрения,
а также собственно автоматическую доставку
грузов.
Критерий оценивания:
Оценивается точность доставки груза в каждую
из двух точек.
При попадании груза в пределах 3 метров от
координат точки доставки начисляется 15
баллов. За каждый дополнительный 1 метр
ошибки снимается 1 балл.
Доставка в каждую точку оценивается
отдельно. Таким образом за задачу можно
получить до 30 баллов.
Время полёта БЛА ограничено 5 минутами.
• Правильный ответ на вопрос по теории
прибавляет 0.5 балла (всего 2 вопроса).
• Время на выполнение без учёта тестовых
вопросов = 180 мин
3/9
4.
Задача №7 – Теоретическая справкаДоставка груза
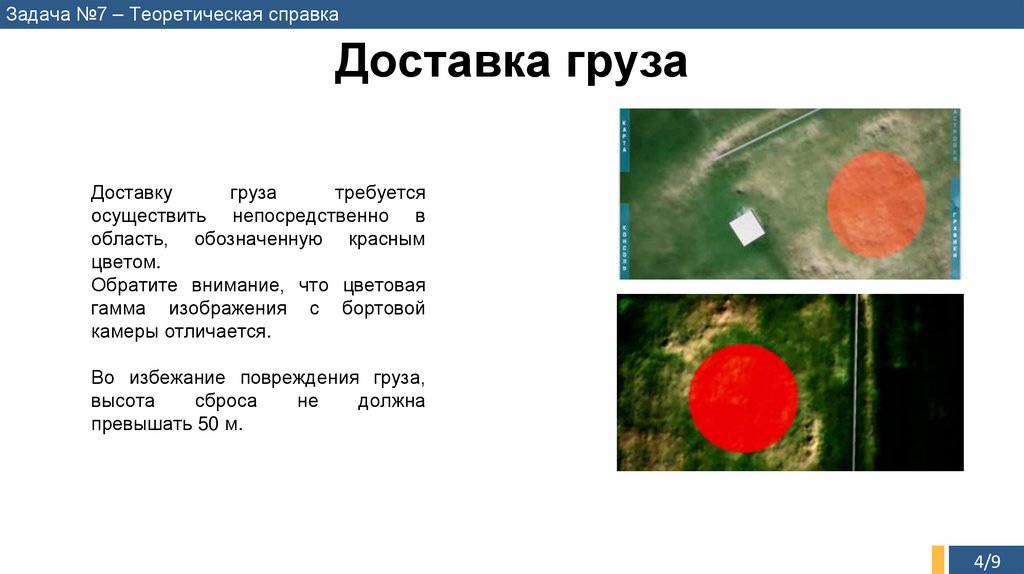
Доставку
груза
требуется
осуществить непосредственно в
область, обозначенную красным
цветом.
Обратите внимание, что цветовая
гамма изображения с бортовой
камеры отличается.
Во избежание повреждения груза,
высота
сброса
не
должна
превышать 50 м.
4/9
5.
Задача №7 – Теоретическая справкаЗоны доставки
Площадь зоны ЧС составляет около
80 ГА.
Зона ЧС ограничена вершинами
четырёхугольника (X, Z):
450, -100 м.
250, 650 м.
800, 100 м.
100, -650 м.
Средняя скорость полёта БЛА
составляет 65 км/ч.
Максимальный угол крена равен 20
градусов.
Точки доставки груза
гарантированно находятся в
пределах обозначенной зоны ЧС.
При перезапуске симулятора
изменяются начальное положение
БЛА и координаты зон доставки. Эта
функция добавлена для
тестирования ваших решений на
надёжность вне зависимости от
исходных данных.
Финальное (оценочное)
тестирование будет осуществляться
на закрытых данных – одинаковых
для всех команд.
5/9
6.
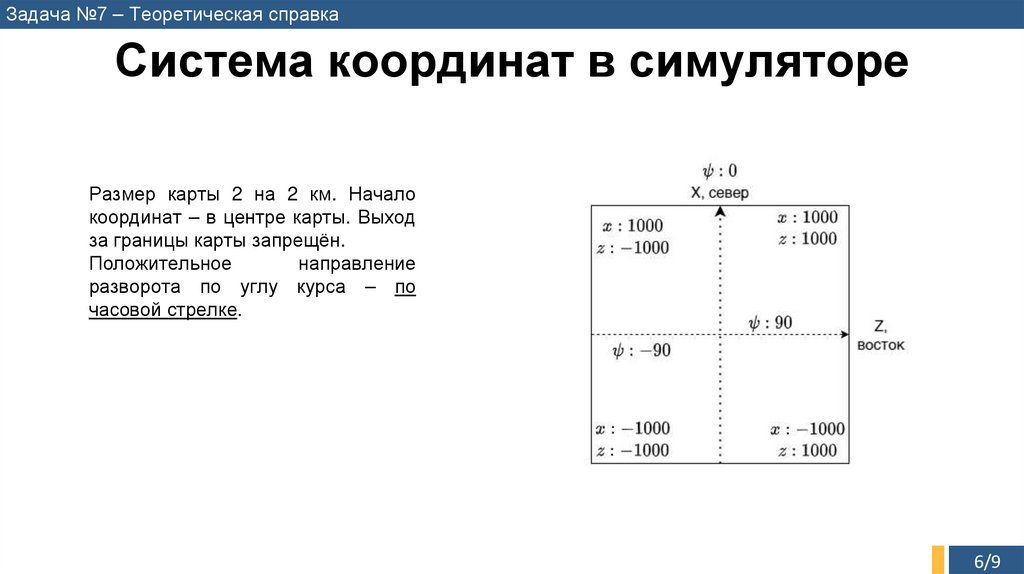
Задача №7 – Теоретическая справкаСистема координат в симуляторе
Размер карты 2 на 2 км. Начало
координат – в центре карты. Выход
за границы карты запрещён.
Положительное
направление
разворота по углу курса – по
часовой стрелке.
6/9
7.
Задача №7 – Теоретическая справкаШаблон программы
Предоставленный шаблон программы уже содержит весь код для общения с симулятором и
полётным контроллером.
Функция sendNewWaypoint(X, Z, H) используется для отправки новых путевых точек на
полётный контроллер. После получения такой команды БЛА начнёт движение к точке с
указанными координатами. После достижения этой точки БЛА вернётся на траекторию,
заданную по умолчанию.
Функция camera_processing_thread() осуществляет обработку изображений с бортовой
камеры БЛА. Именно в этой функции должен содержаться алгоритм решения задачи.
Структура uav_state и соответствующая глобальная переменная last_telemetry содержат
данные телеметрии БЛА, полученные с симулятора. Обновление last_telemetry
осуществляется в параллельном потоке с частотой около 10 Гц.
Функция sendDropCargo() отправляет команду на сброс груза. Обратите внимание, что эта
команда будет обработана только если текущая высота полёта не превышает 60 м.
Допускается создание вспомогательных функций и глобальных переменных, не влияющих на
работу служебных функций, предоставленных в шаблоне программы.
7/9
8.
Задача №7 – Теоретическая справкаНедоработанная система БЛА
В рамках решения этой задачи вам также выдаётся САУ БЛА (решение задачи №3). Эта
система автоматического управления далека от идеала. Переходные процессы могут
достигать десятков секунд!
Вы можете либо доработать её самостоятельно, либо учитывать её ошибки при
формировании полётного задания для БЛА в python.
Бортовая камера не отличается высоким качеством изображения. Кроме того, если ваш
алгоритм обработки изображений окажется слишком сложным с вычислительной точки
зрения – у вас появится временной лаг (рассинхронизация данных телеметрии и
системы технического зрения).
Одна из трёх координат точки сброса – её высота. Обнаружить ориентир на малой
высоте может быть намного проще (и точнее), но область обзора бортовой камеры в
этом случае существенно снижается.
8/9
9.
Задача №7 – Декомпозиция задачиАлгоритм решения
1. Сформировать траекторию полёта БЛА; написать код
алгоритма траекторного управления для реализации этой
траектории
2. Доработать систему управления БЛА
3. Отладить алгоритм определения координат точки доставки
груза.
4. Продумать логику сброса груза после нахождения
координат точек доставки
5. Отработать разработанные алгоритмы на симуляторе.
9/9