






 Программное обеспечение
Программное обеспечениеПохожие презентации:










Разработка прототипа системы автопилота для трактора с алгоритмом построения оптимальной траектории движения
1.
АгроРутер2.
Состав:Чудин Саид
Конструктор
Расчетчик
Войстрик Артем
Программист
Фишер Даниил
Программист
Солодкий
Максим
Программист
Котлубаев
Александр
Программист
Электронщик
3.
Цели:Цель проекта —
разработка прототипа
системы автопилота для
трактора с алгоритмом
построения оптимальной
траектории движения на
основе заданных
параметров поля.
Задачи:
1) Аналитический обзор
существующих
технических решений.
2) Расчет конструктивных
параметров и составление
блок схем алгоритмов.
3) Разработка 3Д модели
системы «подруливания».
4) Разработка электронного
блока управления
системой.
5) Разработка алгоритмов
навигации
6) Экономическое
обоснование технического
решения
4.
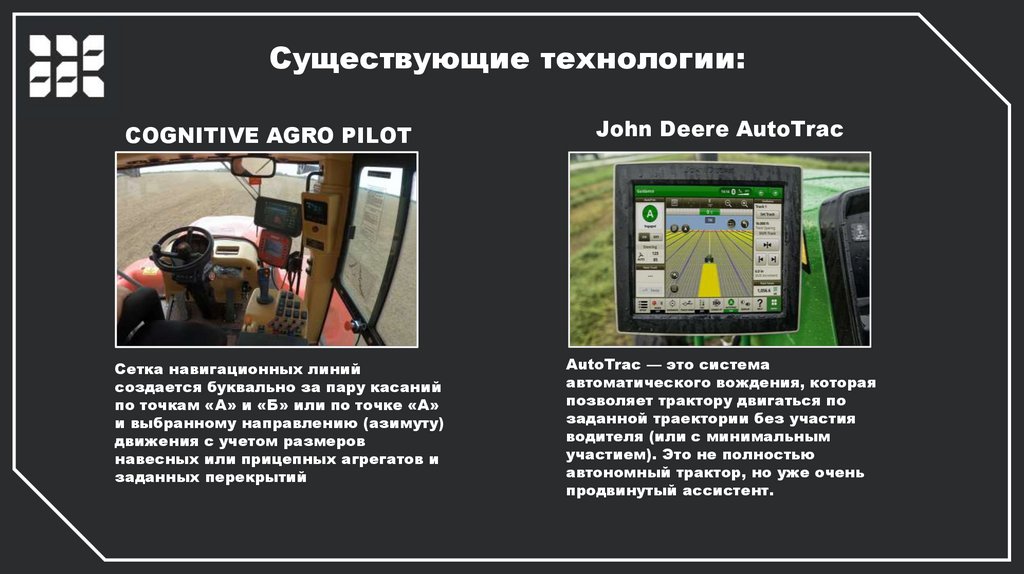
Существующие технологии:COGNITIVE AGRO PILOT
Сетка навигационных линий
создается буквально за пару касаний
по точкам «А» и «Б» или по точке «А»
и выбранному направлению (азимуту)
движения с учетом размеров
навесных или прицепных агрегатов и
заданных перекрытий
John Deere AutoTrac
AutoTrac — это система
автоматического вождения, которая
позволяет трактору двигаться по
заданной траектории без участия
водителя (или с минимальным
участием). Это не полностью
автономный трактор, но уже очень
продвинутый ассистент.
5.
КонцептВычислительный
блок
Микрокомпьютер
GNSS/IMU
Алгоритмический
блок
Узел
Управления
Местоположение
Цифровое
картирова
ние
Энкодер
DC-DC
Траектория
Следование
пути
Электродвигатель
Контроллер
Драйвера
6.
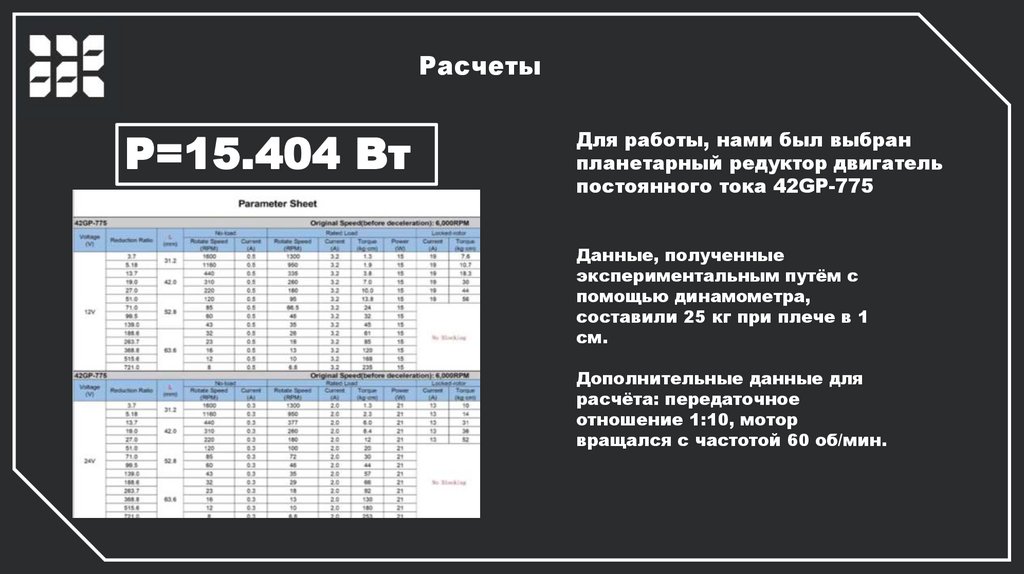
РасчетыP=15.404 Вт
Для работы, нами был выбран
планетарный редуктор двигатель
постоянного тока 42GP-775
Данные, полученные
экспериментальным путём с
помощью динамометра,
составили 25 кг при плече в 1
см.
Дополнительные данные для
расчёта: передаточное
отношение 1:10, мотор
вращался с частотой 60 об/мин.
7.
Электроника8.
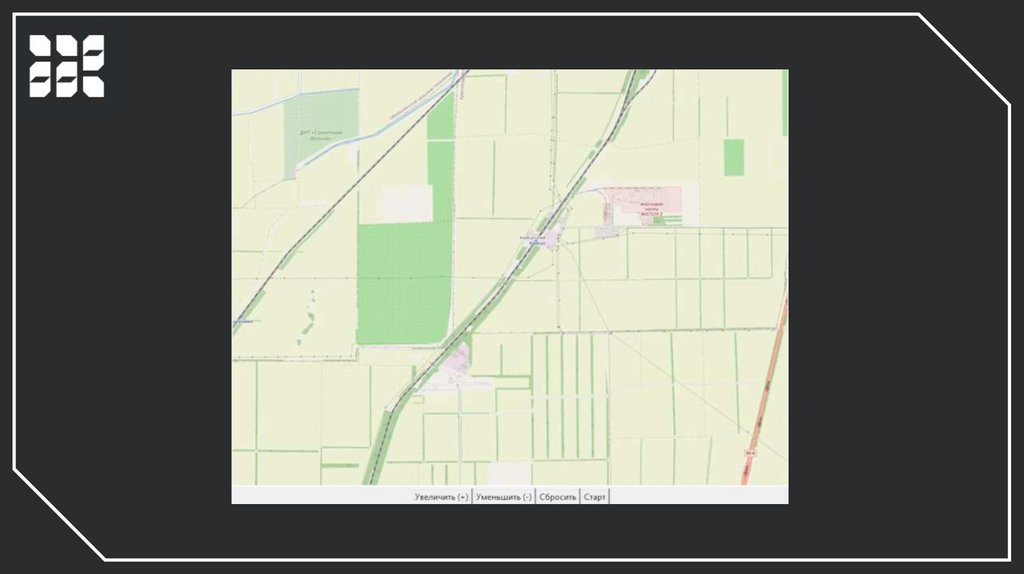
НАЧАЛОАлгоритм OpenStreetMap
Параметры: указываем
координаты, масштаб
Цикл по y
Скачивание
карты
Скачивание
тайтлов
Расчет кусочков:
программа вычисляет,
какие фрагменты карты
нужны
Валиден
ли файл
Нет
Да
Сохранение
в png
Выбор сервера
Формирование URL
Запрос на скачивание с
задержкой
Цикл по х
Конец
Увеличиваем
задержку перед
запросом
Да
Заблочен
ли запрос
Нет
Добавляем
на холст
9.
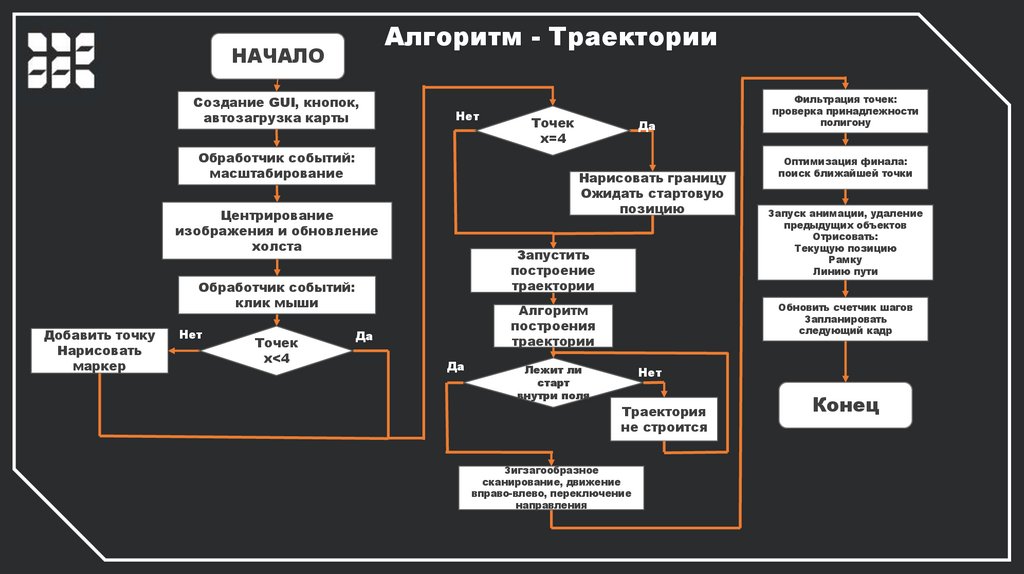
Алгоритм - ТраекторииНАЧАЛО
Создание GUI, кнопок,
автозагрузка карты
Нет
Обработчик событий:
масштабирование
Запустить
построение
траектории
Обработчик событий:
клик мыши
Нет
Точек
x<4
Да
Нарисовать границу
Ожидать стартовую
позицию
Центрирование
изображения и обновление
холста
Добавить точку
Нарисовать
маркер
Точек
x=4
Да
Оптимизация финала:
поиск ближайшей точки
Запуск анимации, удаление
предыдущих объектов
Отрисовать:
Текущую позицию
Рамку
Линию пути
Обновить счетчик шагов
Запланировать
следующий кадр
Алгоритм
построения
траектории
Да
Фильтрация точек:
проверка принадлежности
полигону
Лежит ли
старт
внутри поля
Нет
Траектория
не строится
Зигзагообразное
сканирование, движение
вправо-влево, переключение
направления
Конец
10.
НАЧАЛОИнициализация
компонентов
Алгоритм – Рулевого
управления
Нет
Есть
команда от
компьютера
Цикл loop
Чтение
текущего угла
энкодера
Отправка текущих
значений руля на
компьютер
Повернуть на
заданный угол
Управление
двигателем
Да
11.
3D-модель(концепт)12.
Видео13.
Спасибо завнимание!!!