




 Промышленность
ПромышленностьПохожие презентации:


")
 пользовательских «дронов»")


")

 в авиации")

Взаимодействие БЛА. Практическая работа. Труд (технология). 9 класс
1.
Труд (технология) 9 классПрактическая работа
«Взаимодействие БЛА»
2.
Принципы взаимодействия БЛАБеспилотные летательные аппараты (БЛА), также
известные как дроны, представляют собой
устройства, управляемые дистанционно или
автономно, без участия пилота на борту.
Взаимодействие между БЛА и окружающей
средой, операторами и другими системами
регулируется рядом принципов, которые
обеспечивают безопасность полетов,
эффективность выполнения задач и соблюдение
нормативных требований.
Ключевые принципы взаимодействия БЛА
Автономность и автоматизация
Безопасность
Коммуникация и управление
Законодательство и регулирование
Применение технологий искусственного интеллекта
3.
Принципы взаимодействиябеспилотного летательного аппарата
Безопасность является одним из главных
приоритетов при эксплуатации БЛА. Она
включает несколько аспектов:
Управление воздушным
пространством
• Необходимо соблюдать
правила воздушного
движения, чтобы
избежать столкновений
с другими воздушными
судами и объектами. Это
достигается путем
координации с
авиадиспетчерскими
службами и
использованием
специальных зон для
беспилотников.
Технические требования
Обучение операторов
• БЛА должен
соответствовать
стандартам
безопасности, включая
устойчивость к внешним
воздействиям (ветру,
осадкам) и наличие
резервных систем
управления.
• Операторы БЛА обязаны
пройти обучение и
получить
соответствующие
лицензии,
подтверждающие их
квалификацию.
4.
Принципы взаимодействиябеспилотного летательного аппарата
Современные БЛА обладают высокой степенью
автоматизации и автономии, что позволяет им
выполнять задания без постоянного
вмешательства оператора. Автономные системы
включают навигационные алгоритмы, сенсоры и
программное обеспечение для обработки данных
в режиме реального времени.
Автономность и автоматизация
Планирование
маршрута
Избежание препятствий
Самообслуживание
• БЛА могут
самостоятельно
прокладывать маршрут
полета, учитывая
ограничения
пространства и
препятствия.
• Системы
предотвращения
столкновений позволяют
беспилотным
летательным аппаратам
избегать объектов на
пути следования.
• Некоторые модели
способны автоматически
возвращаться на базу
для зарядки
аккумулятора или
замены оборудования.
5.
Принципы взаимодействиябеспилотного летательного аппарата
Эффективная связь между оператором и
БЛА – ключевая составляющая успешного
выполнения миссии. Важнейшие элементы
коммуникации:
Коммуникация и управление
Радиоканал
GPS-навигация
Интерфейсы оператора
• Для передачи команд и
получения телеметрии
используется
радиосвязь. Важно
обеспечить стабильный
сигнал и
минимизировать
помехи.
• Глобальная система
позиционирования
помогает точно
определять
местоположение БЛА и
корректировать
траекторию полета.
• Управление
осуществляется через
пульт дистанционного
управления или
специальное
программное
обеспечение,
установленное на
компьютере или
мобильном устройстве.
6.
Принципы взаимодействиябеспилотного летательного аппарата
Эксплуатация БЛА подчиняется строгим
законодательным нормам, установленным
государственными органами.
Законодательство и регулирование
Разрешение на полет
Зоны ограничений
• В некоторых странах
требуется получение
разрешения от
авиационных властей
перед выполнением
коммерческих или
массовых полетов.
• Существуют зоны, где
полеты запрещены или
ограничены, например,
вблизи аэропортов,
военных объектов и
государственных
учреждений.
Конфиденциальность
данных
• Собранные данные
должны обрабатываться
в соответствии с
законами о защите
персональных данных.
7.
Принципы взаимодействиябеспилотного летательного аппарата
Искусственный интеллект (ИИ) играет важную
роль в развитии БЛА, улучшая их способность
принимать решения в сложных ситуациях.
Применение технологий искусственного интеллекта
Распознавание образов
• Камеры на борту БЛА
могут использовать ИИ
для идентификации
объектов, людей или
животных.
Анализ данных в
реальном времени
Прогнозирование
поведения
• Программное
обеспечение с
элементами машинного
обучения позволяет
быстро обрабатывать
большие объемы
информации,
поступающей с
датчиков.
• Алгоритмы ИИ
помогают предсказывать
изменения в
окружающей среде и
адаптироваться к ним.
8.
Синхронный полёт БЛА вдоль заданного маршрутаСинхронный полет беспилотных летательных
аппаратов (БЛА) вдоль заданного маршрута –
это сложная задача, которая включает в себя
координацию движения нескольких БЛА таким
образом, чтобы они следовали заранее
определенным траекториям и поддерживали
фиксированное расстояние друг от друга. Для
достижения этой цели можно использовать
алгоритмы планирования пути, навигационных
систем и контроля.
Алгоритм для синхронного полета
Постановка задачи
Построение траектории
Контроль положения
Планирование скорости
9.
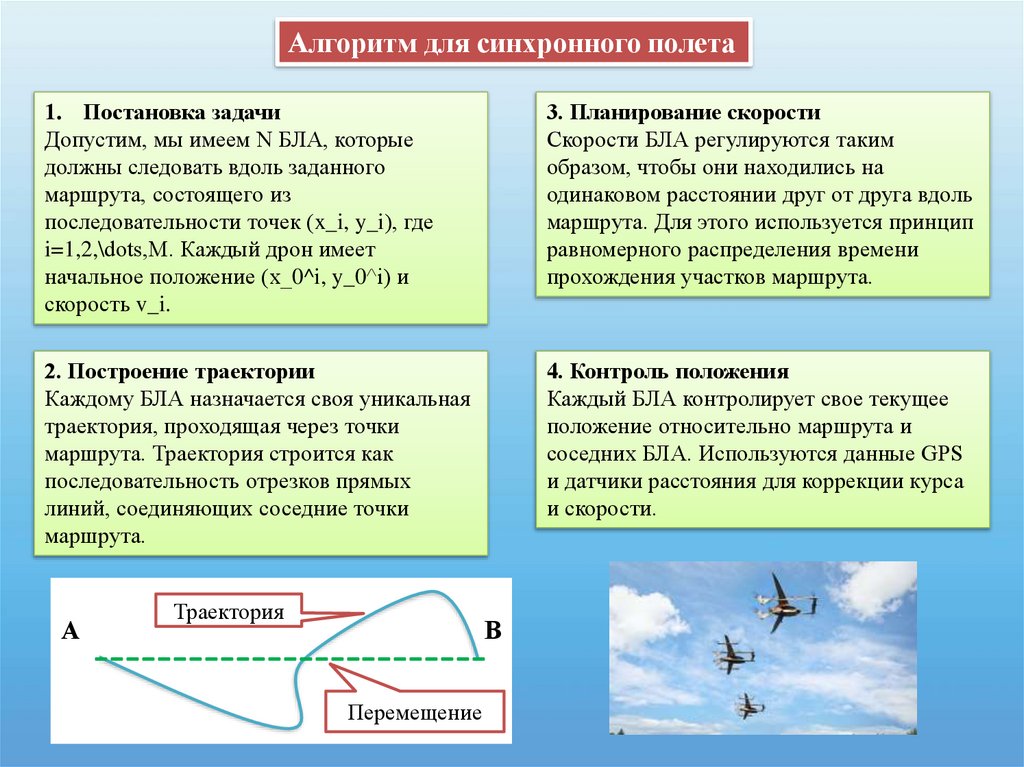
Алгоритм для синхронного полета1. Постановка задачи
Допустим, мы имеем N БЛА, которые
должны следовать вдоль заданного
маршрута, состоящего из
последовательности точек (x_i, y_i), где
i=1,2,\dots,M. Каждый дрон имеет
начальное положение (x_0^i, y_0^i) и
скорость v_i.
3. Планирование скорости
Скорости БЛА регулируются таким
образом, чтобы они находились на
одинаковом расстоянии друг от друга вдоль
маршрута. Для этого используется принцип
равномерного распределения времени
прохождения участков маршрута.
2. Построение траектории
Каждому БЛА назначается своя уникальная
траектория, проходящая через точки
маршрута. Траектория строится как
последовательность отрезков прямых
линий, соединяющих соседние точки
маршрута.
4. Контроль положения
Каждый БЛА контролирует свое текущее
положение относительно маршрута и
соседних БЛА. Используются данные GPS
и датчики расстояния для коррекции курса
и скорости.
А
Траектория
В
------------------------Перемещение
10.
Программирование БЛА на синхронныйполёт вдоль заданного маршрута
Для программирования синхронного
полёта нескольких беспилотных летательных
аппаратов (БЛА) вдоль заданного маршрута
можно использовать различные языки
программирования и среды разработки.
Шаги реализации
1. Импорт необходимых библиотек:
import pybullet as p
from time import sleep
2. Инициализация симуляции:
p.connect(p.GUI)
p.setGravity(0, 0, -10)
plane = p.loadURDF("plane.urdf")
3. Загрузка моделей дронов:
drone1 = p.loadURDF("drone1.urdf", [0, 0, 1])
drone2 = p.loadURDF("drone2.urdf", [0, 0, 1],
useFixedBase=False)
4. Определение маршрута: определим маршрут
в виде списка координат точек:
route = [(0, 0, 1), (1, 0, 1), (1, 1, 1), (0, 1, 1)]
11.
Программирование БЛА на синхронныйполёт вдоль заданного маршрута
Шаги реализации
5. Синхронизация движений: напишем функцию для
перемещения каждого дрона по маршруту:
def move_drone(drone_id, target_position): current_position =
p.getBasePositionAndOrientation(drone_id)[0]
dx = target_position[0] - current_position[0]
dy = target_position[1] - current_position[1]
dz = target_position[2] - current_position[2]
for i in range(100):
p.applyExternalForce(drone_id, -1, [dx/100, dy/100, dz/100], [0,
0, 0], p.WORLD_FRAME)
p.stepSimulation() sleep(0.01)
6. Основной цикл выполнения: запустим
основной цикл, который будет перемещать оба
БЛА по маршруту.
for point in route:
move_drone(drone1, point)
move_drone(drone2, point)
7. Завершение симуляции: завершим
симуляцию после прохождения маршрута:
p.disconnect()
12.
Кооперативная транспортировка грузаКооперативная транспортировка груза – это
задача, когда несколько беспилотных летательных
аппаратов (БЛА) объединяют усилия для
переноса тяжелого предмета. Это требует
сложных алгоритмов координации и управления,
поскольку каждый БЛА должен поддерживать
синхронное движение, балансировку нагрузки и
предотвращать столкновения.
1. Подготовка
оборудования
2. Создание
программного
обеспечения
3. Тестирование и
настройка
• Убедитесь, что у вас есть
необходимое количество
БЛА, способных
поднимать груз.
• Установите на каждом
БЛА оборудование для
захвата груза (например,
магниты, крюки или
захваты).
• Разработайте алгоритм
для координирования
движения всех БЛА.
• Реализуйте систему
обмена данными между
БЛА для поддержания
постоянного контакта и
координации действий.
• Проведите серию тестов
для проверки
правильности работы
алгоритма.
• Настройте параметры
управления каждым БЛА
для оптимальной
производительности.
13.
Кооперативная транспортировка груза4. Реализация задачи
• Загрузите программу на
каждый БЛА.
• Выполните процедуру
захвата груза всеми БЛА
одновременно.
• Начните перемещение
груза по заданному
маршруту.
5. Мониторинг и
корректировка
• Постоянно отслеживайте
состояние БЛА и груза
во время
транспортировки.
• Вносите необходимые
корректировки в случае
возникновения проблем.
6. Завершение операции
• Когда груз доставлен в
нужное место, отпустите
его и верните БЛА на
базу.
14.
Программирование БЛА на кооперативнуютранспортировку груза
Программирование кооперативной
транспортировки груза с помощью нескольких
беспилотных летательных аппаратов (БЛА)
представляет собой сложную задачу,
включающую синхронизацию действий,
распределение нагрузки и управление движением.
Предположим, что у нас есть два беспилотных
летательных аппарата, которые должны поднять и
перенести груз по определенному маршруту. Груз
закреплен тросами на обоих БЛА.
Пример кода на Python
import pybullet as p
from time import sleep
15.
Программирование БЛА на кооперативнуютранспортировку груза
1. Инициализация симуляции
p.connect(p.GUI)
p.setGravity(0, 0, -10)
plane = p.loadURDF("plane.urdf")
2. Загрузка моделей дронов
drone1 = p.loadURDF("drone1.urdf", [0, 0, 1])
drone2 = p.loadURDF("drone2.urdf", [1, 0, 1])
3. Определение маршрута
route = [(0, 0, 1), (1, 0, 1), (1, 1, 1), (0, 1, 1)]
4. Функция для перемещения дронов к
целевой точке
def move_drones_to_point(target_position):
5. Получаем текущие позиции дронов
pos1 = p.getBasePositionAndOrientation(drone1)[0]
pos2 = p.getBasePositionAndOrientation(drone2)[0]
16.
Программирование БЛА на кооперативнуютранспортировку груза
6. Вычисляем направления движения для каждого
дрона
delta_pos1 = [target_position[i] - pos1[i] for i in range(3)]
delta_pos2 = [target_position[i] - pos2[i] for i in range(3)]
8. Основной цикл выполнения
for point in route:
print(f"Moving to {point}")
move_drones_to_point(point)
7. Перемещаем дроны небольшими шагами
steps = 50
for step in range(steps):
p.applyExternalForce(drone1, -1,
[delta_pos1[0]/steps, delta_pos1[1]/steps,
delta_pos1[2]/steps], [0, 0, 0], p.WORLD_FRAME)
p.applyExternalForce(drone2, -1,
[delta_pos2[0]/steps, delta_pos2[1]/steps,
delta_pos2[2]/steps], [0, 0, 0], p.WORLD_FRAME)
p.stepSimulation()
sleep(0.02)
9. Завершаем симуляцию
p.disconnect()
17.
Объяснение кода1. Инициализация симуляции:
подключаемся к графическому
интерфейсу симуляции (p.connect(p.GUI));
устанавливаем гравитацию (p.setGravity);
загружаем плоскость и модели БЛА (loadURDF).
2. Определение маршрута:
определяем список точек маршрута route, через
которые будут двигаться БЛА.
3. Функция перемещения БЛА:
move_drones_to_point принимает целевую точку и
вычисляет направление движения для каждого БЛА;
применяет внешние силы к каждому
беспилотному летательному аппарату, чтобы двигать
их в нужном направлении маленькими шагами.
4. Основной цикл:
- Проходим по каждой точке маршрута и вызываем
функцию перемещения.
18.
Поиск цели на местностиПоиск цели на местности с помощью беспилотных летательных аппаратов (БЛА) –
это важная задача, которая находит широкое применение в различных областях, включая
военное дело, поисково-спасательные операции, мониторинг окружающей среды и сельское
хозяйство. Задача заключается в том, чтобы обнаружить определенную цель (объект или
область интереса) на обширной территории с использованием одного или нескольких БЛА.
1.Постановка задачи:
определите, какой объект или область
вы хотите найти;
задайте критерии обнаружения
(размер, форма, цвет и т.д.).
2. Выбор оборудования:
выберите подходящие БЛА с
необходимыми датчиками (камера,
тепловизор, лидар и т.д.) и системой
связи.
3. Планирование миссии:
создайте карту местности и
спланируйте маршрут полета БЛА;
определите высоту и скорость полета,
чтобы обеспечить оптимальное
покрытие территории.
19.
Поиск цели на местности4. Программирование БЛА:
разработайте программное обеспечение для
управления БЛА и обработки данных;
включите алгоритмы компьютерного зрения
для анализа изображений и идентификации
целей.
5. Выполнение миссии:
запустите дроны и следите за их
выполнением миссии;
собирайте данные в режиме реального
времени и обрабатывайте их.
6. Анализ данных:
проверьте полученные данные на наличие
целей;
отфильтруйте ложные срабатывания и
подтвердите обнаруженные объекты.
7. Документирование и отчетность:
составьте отчёт о результатах миссии,
включая местоположение и характеристики
обнаруженных объектов.
20.
Программирование БЛА на поиск цели на местностиДля примера рассмотрим простую миссию поиска цели
на местности с использованием симулятора и Python.
Шаг 1.
import simpy
import random
class Drone(simpy.Environment):
def __init__(self, env, route, speed): self.env = env
self.route = route
self.speed = speed
self.action = env.process(self.fly())
Шаг 2.
def fly(self):
for waypoint in self.route:
print(f'Дрон движется к точке
{waypoint}')
yield self.env.timeout(waypoint[2] / self.speed)
if random.random() < 0.1:
print('Цель найдена!') else:
print('Цель не обнаружена.')
Шаг 3.
env = simpy.Environment()
route = [(0, 0, 10), (10, 0, 20), (10, 10, 30)] #
Маршрут (координаты, высота) speed = 5 #
Скорость дрона drone = Drone(env, route,
speed) env.run(until=60)
Поиск цели на местности с помощью
БЛА – это комплексная задача, требующая
тщательной подготовки и грамотного
подхода к использованию технологий.