






 Программирование
Программирование Электроника
ЭлектроникаПохожие презентации:










Робо-платформа
1.
Робо-платформаВыполнено: Александр Душанин
2.
ЦельРазработка
актуального
устройства для
перевозки каких-либо
предметов без
использования
человеческих усилий.
3.
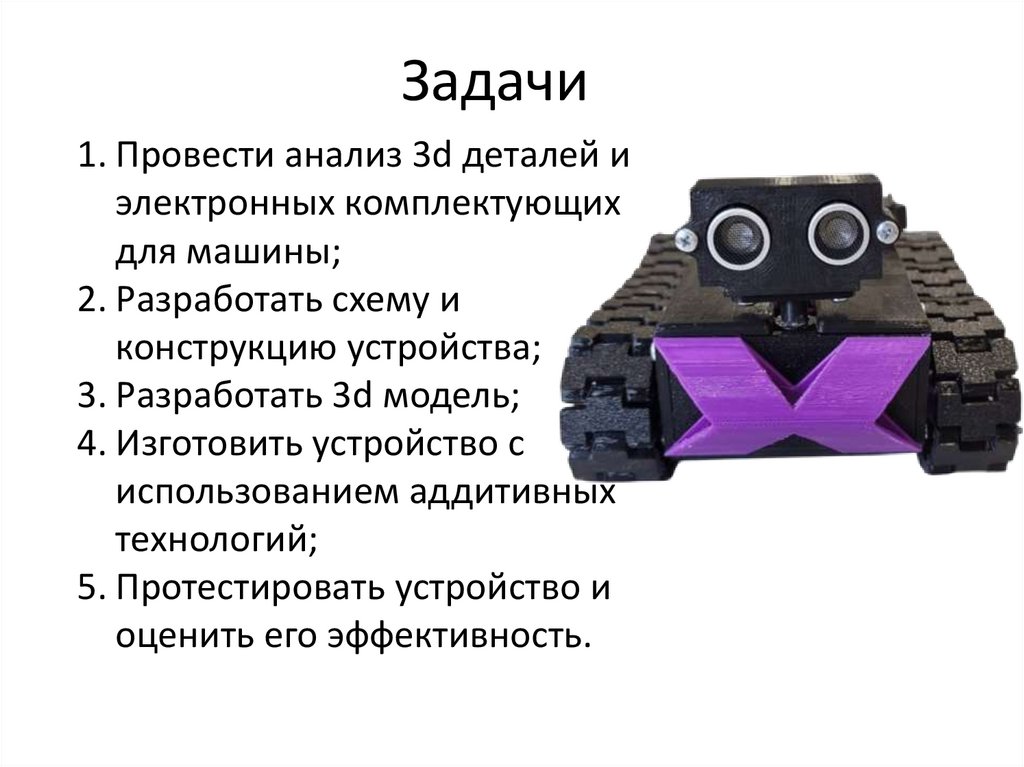
Задачи1. Провести анализ 3d деталей и
электронных комплектующих
для машины;
2. Разработать схему и
конструкцию устройства;
3. Разработать 3d модель;
4. Изготовить устройство с
использованием аддитивных
технологий;
5. Протестировать устройство и
оценить его эффективность.
4.
Актуальность1. Проект предоставляет возможность
изучить основы 3d моделирования и работы
с кодом. Это полезно для школьников и
студентов, которые интересуются
технологиями и хотят получить практические
навыки;
2. Развитие технологий показывает
необходимость использования
оборудования, не затрачивая
человеческий труд.
5.
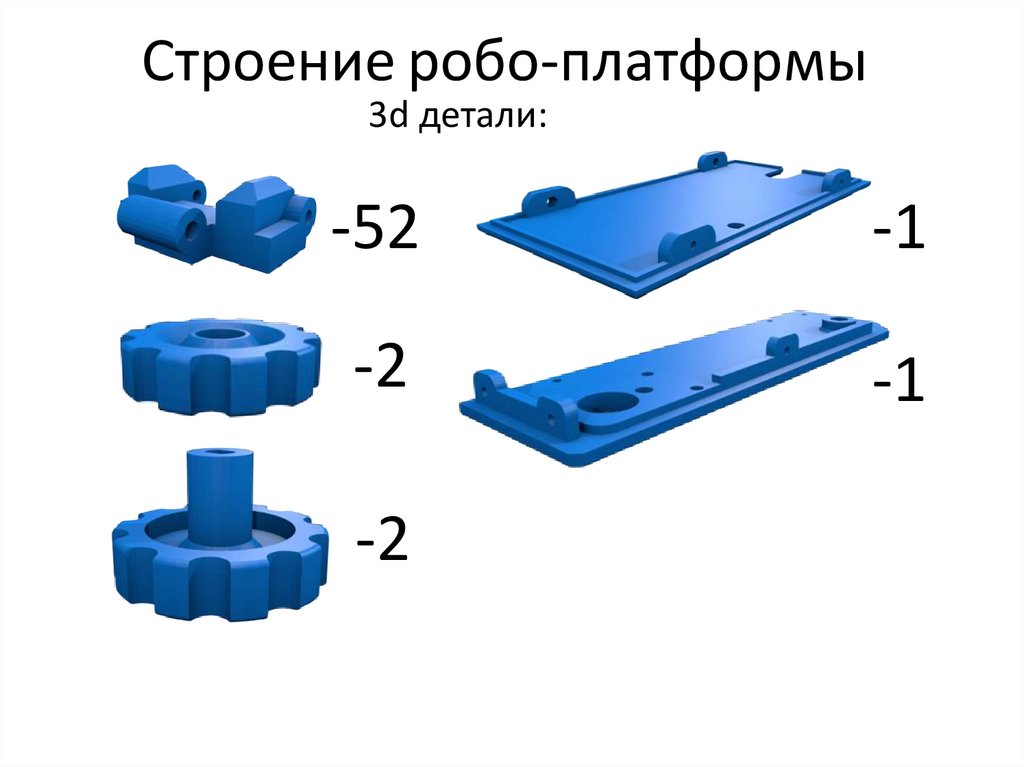
Строение робо-платформы3d детали:
-52
-1
-2
-1
-2
6.
Строение робо-платформыДетали для сборки:
1x Arduino Nanо
1x L9110S Dual H-Bridge
2x двухосевой мотор-редуктор 3В-7В
1x ультразвуковой модуль HC-SR04
1x сервопривод SG90
2x подшипник 3x10x4 мм
7.
Строение робо-платформыСхема робо-платформы:
8.
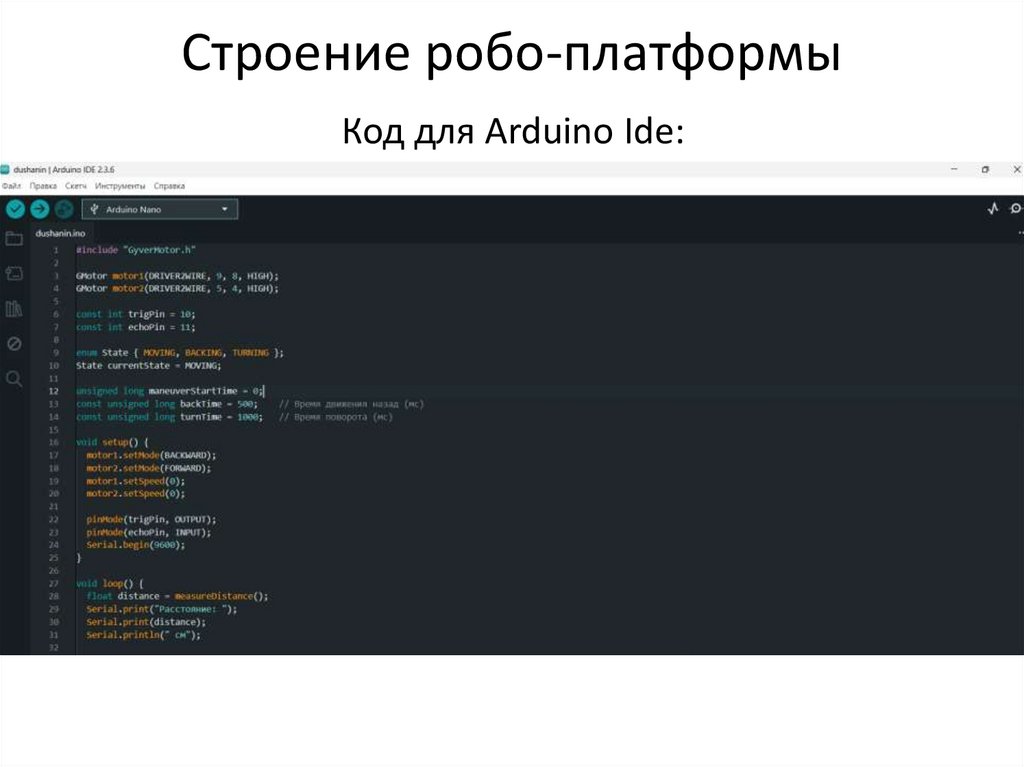
Строение робо-платформыКод для Arduino Ide:
9.
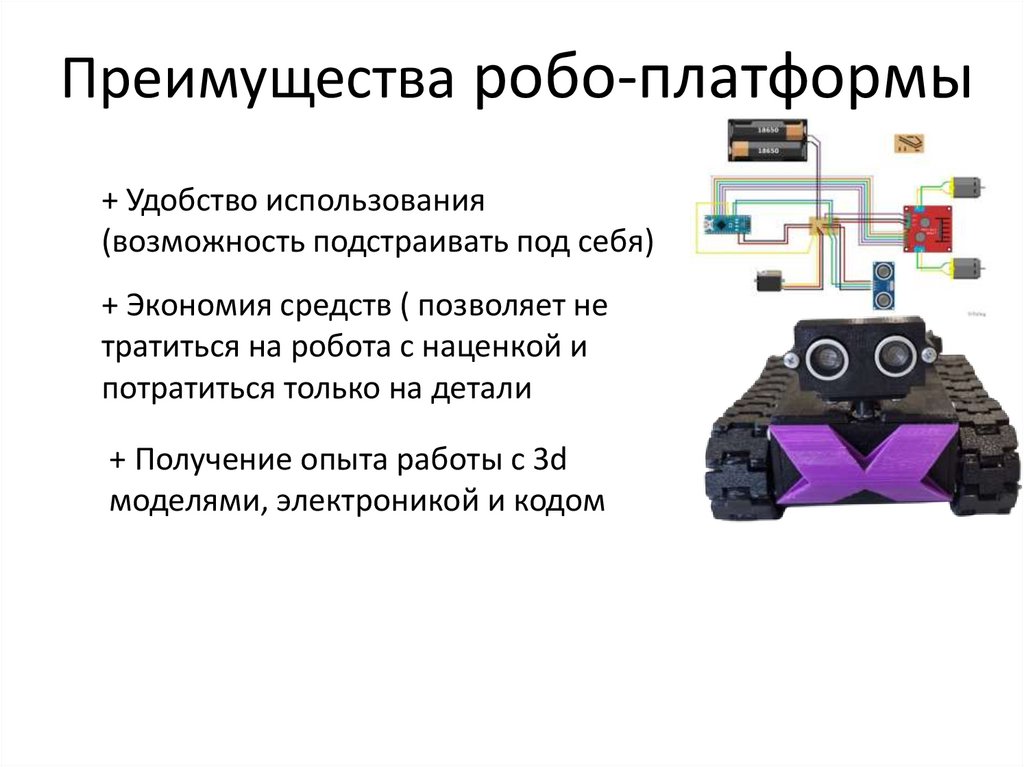
Преимущества робо-платформы+ Удобство использования
(возможность подстраивать под себя)
+ Экономия средств ( позволяет не
тратиться на робота с наценкой и
потратиться только на детали
+ Получение опыта работы с 3d
моделями, электроникой и кодом
10.
Экономическое обоснование1.
2.
3.
4.
5.
6.
Катушка любого пластика – 500р
Arduino uno – 2800р
Servo – 200р
Ультразвуковой модуль – 200р
Двухосевой редуктор 2 шт. - 245р
Держатель для батареек: 6 x 1,5 В (6 x AA) –
200р
7.
32 винта M2x6
2 винта M2x10
18 шестигранных гаек M2
6 винтов M3x25
6 шестигранных гаек M3
1x контактная пластина (34x22 мм)
17x штифтовых контактов
2x радиальный шарикоподшипник 623ZZ
3x10x4 мм
- 1000-1500р
Итог: около 6500р
11.
ЗаключениеИз этой презентации можно сделать
несколько выводов:
1. В ходе данного проекта была успешно разработана и
реализована робо-платформа на базе Arduino,
объединяющая современные технологии электроники,
3D-печати и программирования. Основной целью
проекта являлось создание автономного гусеничного
робота, способного избегать препятствия с
использованием ультразвукового датчика HC-SR04.