 Информатика
ИнформатикаПохожие презентации:



")





")
Виртуальная сцена управления FPV-квадрокоптером с выводом данных на мониторы навигатора и оператора
1.
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ФАКУЛЬТЕТ ЦИФРОВЫХ ПРОМЫШЛЕННЫХ ТЕХНОЛОГИЙ
КАФЕДРА КИБЕРФИЗИЧЕСКИХ СИСТЕМ
Выпускная квалификационная работа
на тему:
«Виртуальная сцена управления FPVквадрокоптером с выводом данных для навигатора
и FPV-оператора на отдельные мониторы»
Выполнил студент гр. 20226
Куренной С.Л.
Руководитель к.т.н., доцент
Жиленков А.А.
Санкт-Петербург
2025
2.
Цели и задачи работыЦель: разработка виртуальной сцены управления FPV-квадрокоптером с раздельным
выводом информации на отдельные мониторы для оператора и навигатора.
Задачи работы:
1. Изучить принципы работы FPV-квадрокоптеров и существующие системы управления.
2. Разработать 3D-модель ландшафта и интерфейсы для оператора и навигатора.
3. Настроить полетные характеристики и систему передачи данных с минимальной
задержкой.
4. Провести тестирование системы.
2
3.
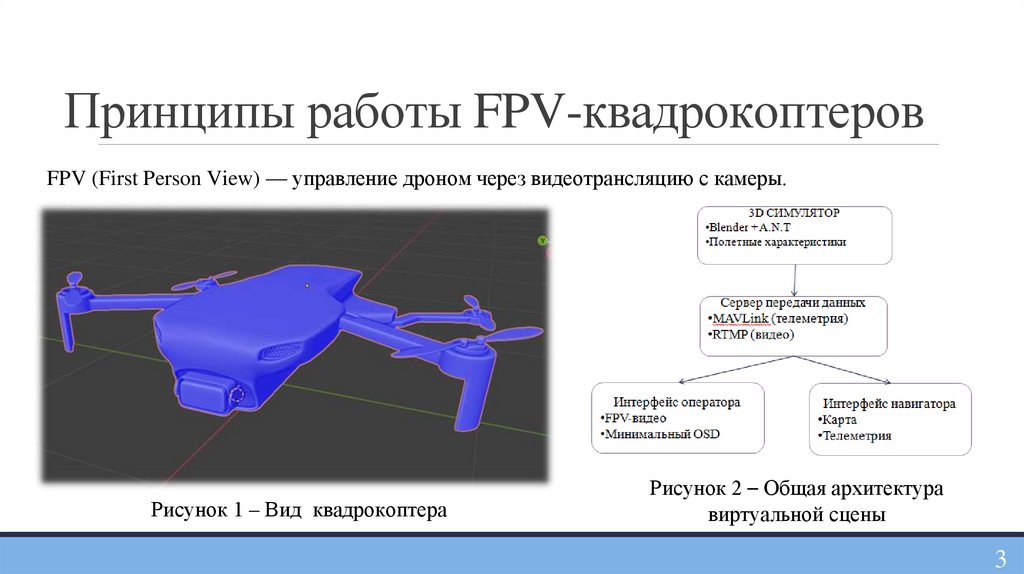
Принципы работы FPV-квадрокоптеровFPV (First Person View) — управление дроном через видеотрансляцию с камеры.
Рисунок 1 – Вид квадрокоптера
Рисунок 2 – Общая архитектура
виртуальной сцены
3
4.
Анализ существующих системуправления
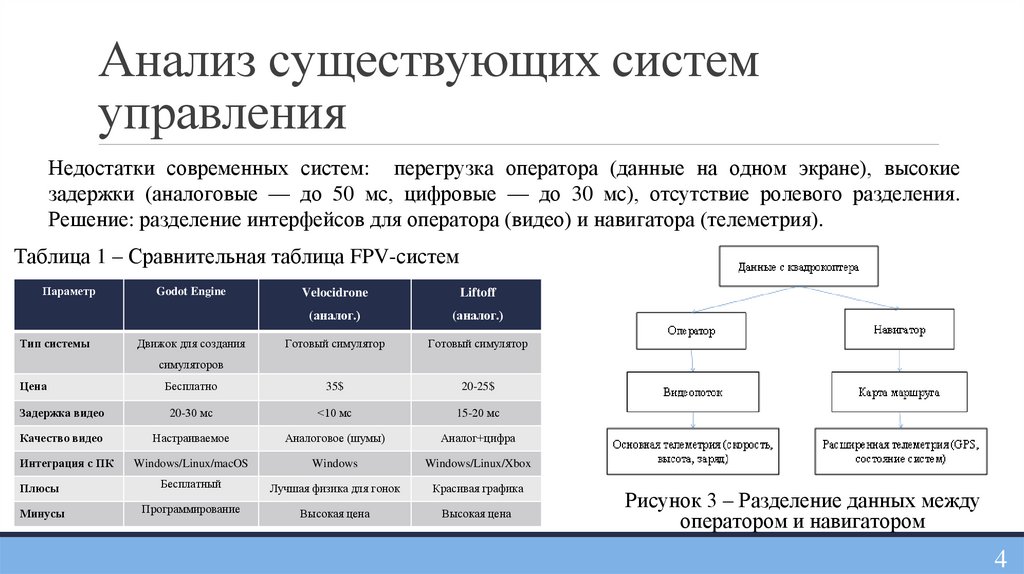
Недостатки современных систем: перегрузка оператора (данные на одном экране), высокие
задержки (аналоговые — до 50 мс, цифровые — до 30 мс), отсутствие ролевого разделения.
Решение: разделение интерфейсов для оператора (видео) и навигатора (телеметрия).
Таблица 1 – Сравнительная таблица FPV-систем
Параметр
Тип системы
Godot Engine
Движок для создания
Velocidrone
Liftoff
(аналог.)
(аналог.)
Готовый симулятор
Готовый симулятор
симуляторов
Цена
Бесплатно
35$
20-25$
Задержка видео
20-30 мс
<10 мс
15-20 мс
Качество видео
Настраиваемое
Аналоговое (шумы)
Аналог+цифра
Интеграция с ПК
Windows/Linux/macOS
Windows
Windows/Linux/Xbox
Плюсы
Бесплатный
Лучшая физика для гонок
Красивая графика
Минусы
Программирование
Высокая цена
Высокая цена
Рисунок 3 – Разделение данных между
оператором и навигатором
4
5.
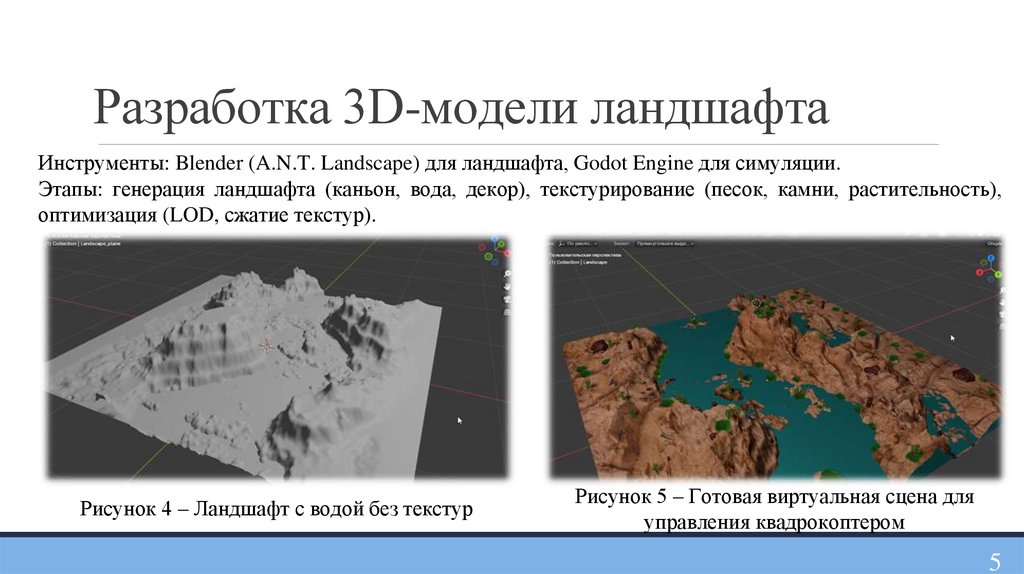
Разработка 3D-модели ландшафтаИнструменты: Blender (A.N.T. Landscape) для ландшафта, Godot Engine для симуляции.
Этапы: генерация ландшафта (каньон, вода, декор), текстурирование (песок, камни, растительность),
оптимизация (LOD, сжатие текстур).
Рисунок 4 – Ландшафт с водой без текстур
Рисунок 5 – Готовая виртуальная сцена для
управления квадрокоптером
5
6.
Интерфейсы FPV-оператора инавигатора
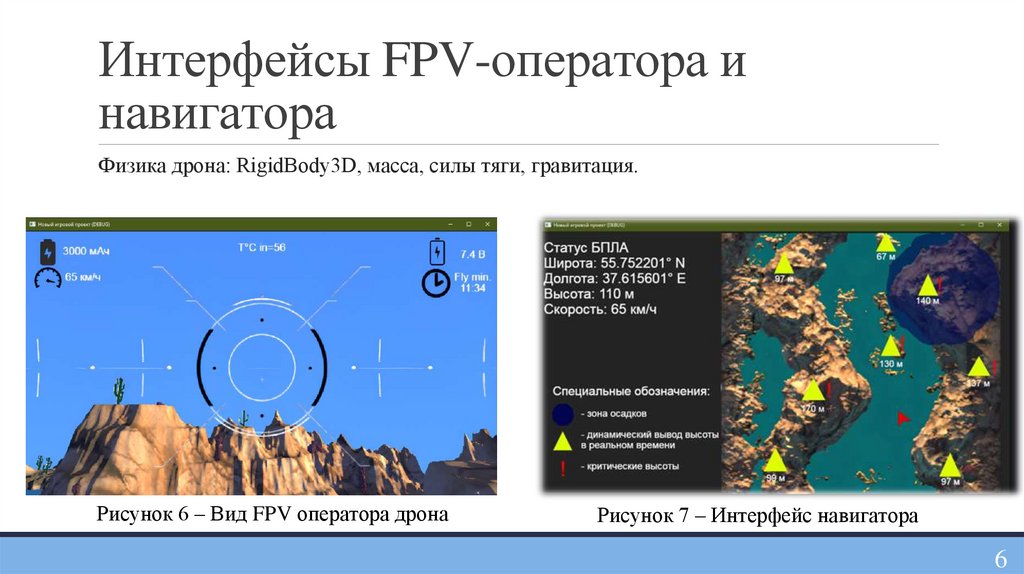
Физика дрона: RigidBody3D, масса, силы тяги, гравитация.
Рисунок 6 – Вид FPV оператора дрона
Рисунок 7 – Интерфейс навигатора
6
7.
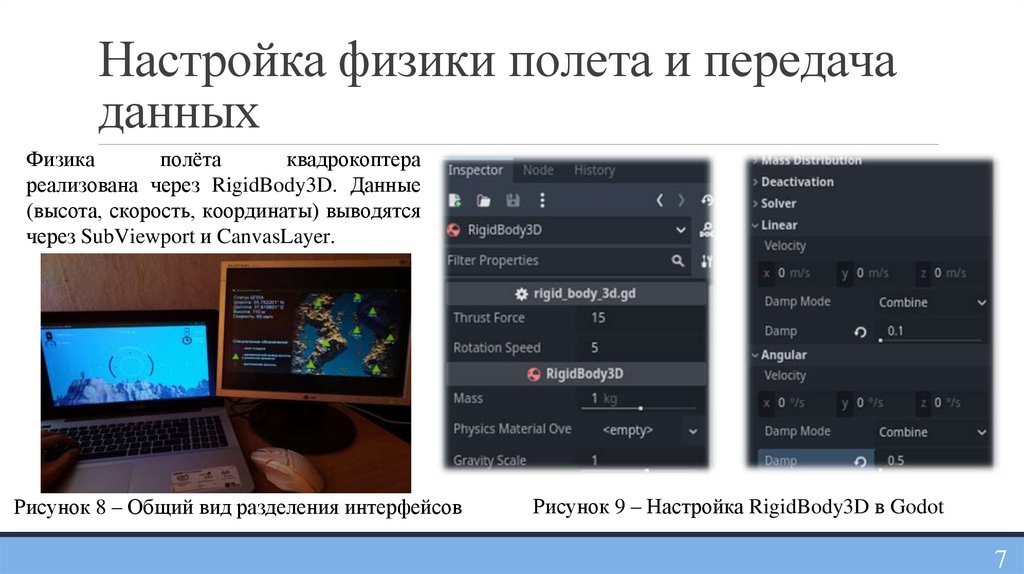
Настройка физики полета и передачаданных
Физика
полёта
квадрокоптера
реализована через RigidBody3D. Данные
(высота, скорость, координаты) выводятся
через SubViewport и CanvasLayer.
Рисунок 8 – Общий вид разделения интерфейсов
Рисунок 9 – Настройка RigidBody3D в Godot
7
8.
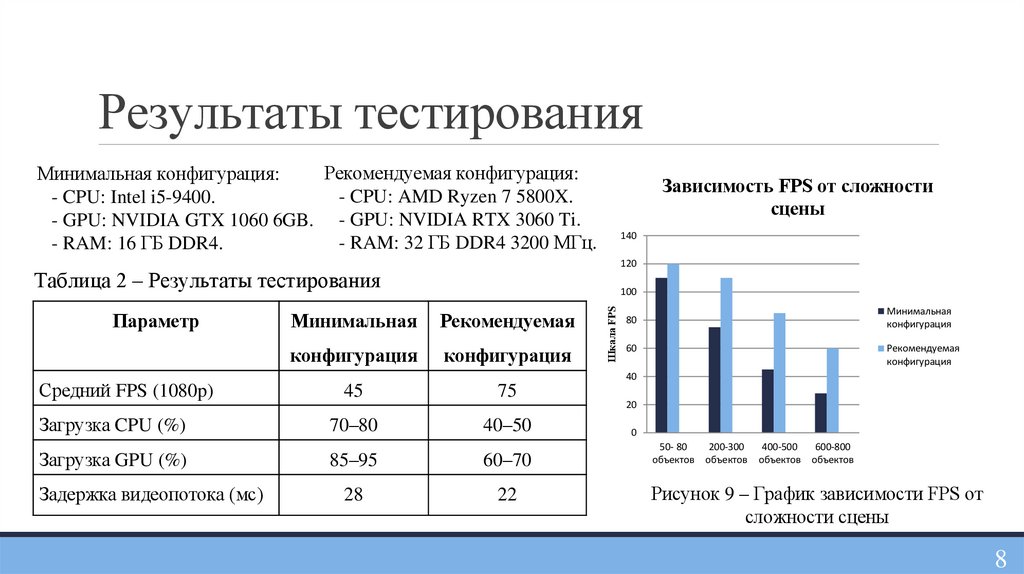
Результаты тестированияРекомендуемая конфигурация:
Минимальная конфигурация:
- CPU: AMD Ryzen 7 5800X.
- CPU: Intel i5-9400.
- GPU: NVIDIA GTX 1060 6GB. - GPU: NVIDIA RTX 3060 Ti.
- RAM: 32 ГБ DDR4 3200 МГц.
- RAM: 16 ГБ DDR4.
Зависимость FPS от сложности
сцены
140
120
Таблица 2 – Результаты тестирования
Средний FPS (1080p)
Загрузка CPU (%)
Загрузка GPU (%)
Задержка видеопотока (мс)
Минимальная
Рекомендуемая
конфигурация
конфигурация
Шкала FPS
Параметр
100
Минимальная
конфигурация
80
60
Рекомендуемая
конфигурация
40
45
75
70–80
40–50
85–95
60–70
28
22
20
0
50- 80
объектов
200-300
объектов
400-500
объектов
600-800
объектов
Рисунок 9 – График зависимости FPS от
сложности сцены
8
9.
ЗаключениеВ результате выполнения работы была разработана виртуальная сцена управления FPV-квадрокоптером с
раздельным выводом информации на отдельные мониторы для оператора и навигатора, а также:
1. В ходе выполнения работы было установлено, что современные системы управления не обладают раздельным
интерфейсом для навигатора и FPV-оператора, что подтвердило необходимость разработки новой системы.
2. В рамках решения поставленных задач удалось реализовать 3D-модель ландшафта в Blender (каньон, водоем,
растительность)
3. В процессе разработки в Godot Engine были настроены параметры полета дрона (RigidBody3D, силы тяги,
коллизии) и реализовано разделение интерфейсов.
4. В результате тестирования система показала стабильную работу: задержка видеопотока — 25 мс (менее
критичных 30 мс), средний FPS — 45–75 в зависимости от конфигурации ПК.
9