

 Экология
ЭкологияПохожие презентации:









 хозяйством. Экзаменационная работа")
555
1.
Роботы для раздельногосбора мусора: Решение
Глобальной Проблемы
Проект по созданию роботов для автоматизации раздельного сбора
мусора направлен на решение одной из самых острых экологических
проблем современности — утилизации твердых коммунальных
отходов (ТКО).
2.
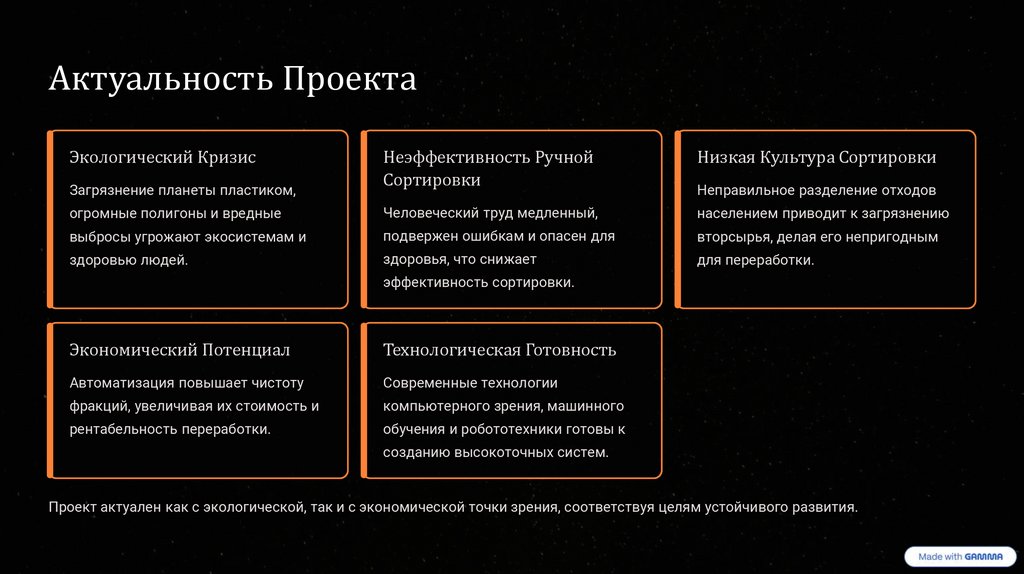
Актуальность ПроектаЭкологический Кризис
Неэффективность Ручной
Сортировки
Низкая Культура Сортировки
огромные полигоны и вредные
Человеческий труд медленный,
населением приводит к загрязнению
выбросы угрожают экосистемам и
подвержен ошибкам и опасен для
вторсырья, делая его непригодным
здоровью людей.
здоровья, что снижает
для переработки.
Загрязнение планеты пластиком,
Неправильное разделение отходов
эффективность сортировки.
Экономический Потенциал
Технологическая Готовность
Автоматизация повышает чистоту
Современные технологии
фракций, увеличивая их стоимость и
компьютерного зрения, машинного
рентабельность переработки.
обучения и робототехники готовы к
созданию высокоточных систем.
Проект актуален как с экологической, так и с экономической точки зрения, соответствуя целям устойчивого развития.
3.
Цель и Миссия ПроектаЦель
Миссия
Разработка и внедрение автономных роботизированных комплексов для автоматической идентификации,
Сделать раздельный сбор и переработку отходов максимально эффективными, доступными и
сортировки и уплотнения ТКО.
стандартизированными с помощью передовых робототехнических решений.
Повышение доли перерабатываемого вторсырья до 90% и снижение доли неправильно отсортированных
Превратить мусор из глобальной проблемы в ценный ресурс для устойчивой и экологически чистой
отходов.
экономики замкнутого цикла.
4.
Дерево Целей ПроектаГенеральная цель: Внедрить робота-сортировщика, повышающего эффективность
раздельного сбора мусора.
1. Разработать функциональный прототип
Создать аппаратную платформу (манипулятор, захват, мобильная база)
Разработать ПО и алгоритмы управления
Обеспечить точное распознавание отходов (компьютерное зрение)
2. Обеспечить высокую производительность
Достичь точности сортировки >95%
Обеспечить целевую скорость работы (X ед./час)
Гарантировать надежность и автономность работы
3. Обеспечить готовность к внедрению
Уложиться в утвержденный бюджет
Продемонстрировать экономический эффект
Обеспечить соответствие стандартам безопасности
5.
Операционные Цели: ДетализацияАппаратная Платформа
Программное Обеспечение
Спроектировать манипулятор (робот-руку) с высокой грузоподъемностью, скоростью и точностью.
Разработать алгоритмы компьютерного зрения для идентификации и классификации отходов.
Разработать систему захватов для разных типов отходов (пневматический, механический).
Обучить нейросетевые модели на больших датасетах изображений отходов.
Интегрировать систему датчиков: камеры высокого разрешения, гиперспектральные/ИК-камеры, лидары.
Создать ПО для планирования траектории движения манипулятора и принятия решений в реальном времени.
Разработать защищенный корпус и модуль предварительного уплотнения/прессования отходов.
Разработать интерфейс оператора и обеспечить удаленное обновление/дообучение моделей.
6.
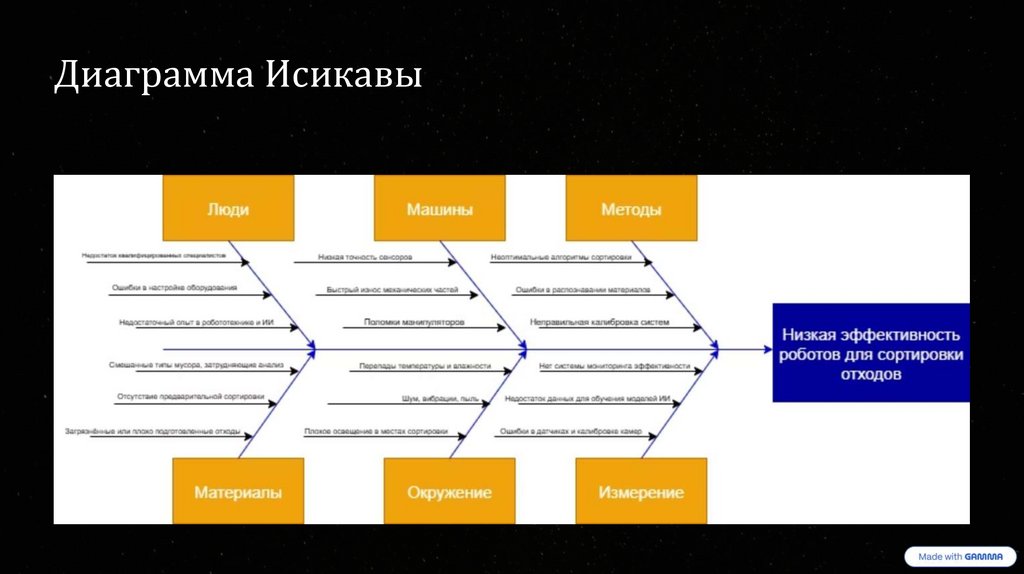
Диаграмма Исикавы7.
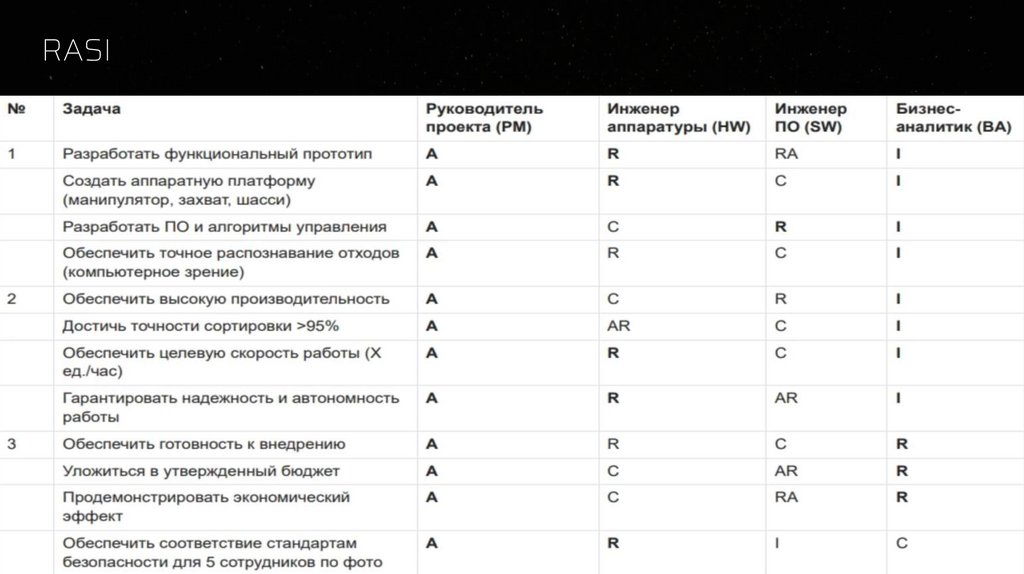
RASI8.
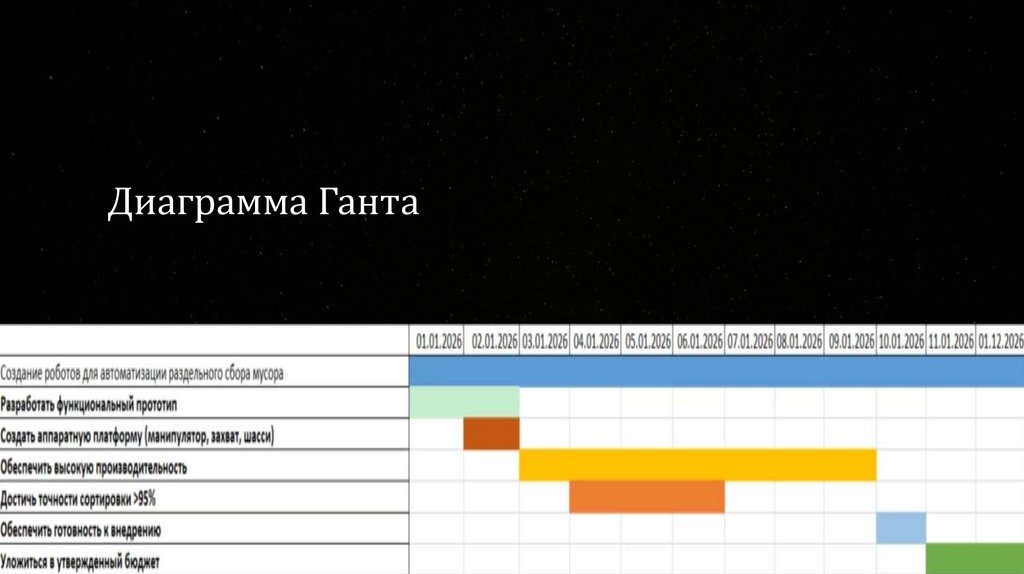
Диаграмма Ганта9.
SWOT-анализСильные стороны:
• Опытная команда
• Современные технологии ИИ
• Актуальность решения
Слабые стороны:
• Ограниченный бюджет
• Недостаточный опыт сертификации
Возможности:
• Рост спроса на эко-технологии
• Государственная поддержка
Угрозы:
• Технические сбои
• Конкуренция на рынке
10.
Выводы по проекту1. Проект решает актуальную экологическую проблему
2. Технология может быть масштабирована
3. Чёткое распределение ролей в команде
4. Открываются возможности для коммерциализации