














 Информатика
ИнформатикаПохожие презентации:










Оптимизация траектории движения робота-манипулятора для минимизации времени выполнения задач
1. Всероссийский конкурс научно-технологических проектов
«Большие вызовы»Оптимизация траектории
движения робота-манипулятора
для минимизации времени
выполнения задач
Выполнил: ученик 7ф класса Круглов Максим
Научный руководитель: Потаповой С.А, учитель
информатики
2. Актуальность
Постоянно растущие требования кскорости и эффективности
производства делают оптимизацию
работы роботов-манипуляторов
критически важной задачей для
современной промышленности.
3. Цель и задачи проекта
Целью: разработка и реализацияэффективного алгоритма
оптимизации траектории
движения робота-манипулятора
для минимизации времени
выполнения заданной
технологической операции,
учитывая кинематические и
динамические ограничения робота
Задачи:
1. Изучить существующие методы оптимизации
траекторий движения роботов-манипуляторов и
проанализировать их преимущества и недостатки.
2. Выбрать оптимальный алгоритм оптимизации
траектории с учётом специфики используемого роботаманипулятора и решаемой задачи.
3. Разработать программное обеспечение для реализации
выбранного алгоритма оптимизации.
4. Провести моделирование работы алгоритма в среде
симулятора робота-манипулятора.
5. Провести экспериментальную проверку алгоритма на
реальном роботе-манипуляторе.
6. Провести сравнительный анализ эффективности
разработанного алгоритма с существующими методами.
7. Оценить влияние оптимизации траектории на
производительность и энергопотребление робота.
4. Объект и предмет
Объект исследования: Процесс управлениядвижением робота-манипулятора.
Предмет изучения: Алгоритмы
оптимизации траектории движения
роботаманипулятора для минимизации
времени выполнения задачи.
5. Технические требования
Система должна быть легкой в установке иобслуживании.
Должна быть предусмотрена возможность
автоматического подъемного механизма.
Управление роботом должно быть интуитивно понятным и
реализовываться через геймпад.
6. Практическая значимость
Создание, программирование, анализ, сравнение и демонстрация работы:• Повышение производительности роботов-манипуляторов в промышленности.
• Сокращение времени выполнения производственных операций.
• Снижение энергопотребления роботов.
• Улучшение точности работы роботов.
• Возможность применения разработанного алгоритма в различных областях
промышленной робототехники.
7. Топ-10 трендов промышленной робототехники
8. Разработка идеи и концепции робота. Формулировка технического задания.
Технические требования:Ожидаемые результаты
1. Прочность и надежность
2. Устойчивость
3. Легкость управления
4. Эргономика
5. Безопасность
6. Скорость и
маневренность
7. Модульность и
расширяемость
8. Материалы
9. Дизайн
Разработанный алгоритм оптимизации
может быть адаптирован для различных
типов
роботов-манипуляторов
производственных
задач,
и
расширяя
возможности применения робототехники в
различных отраслях промышленности.
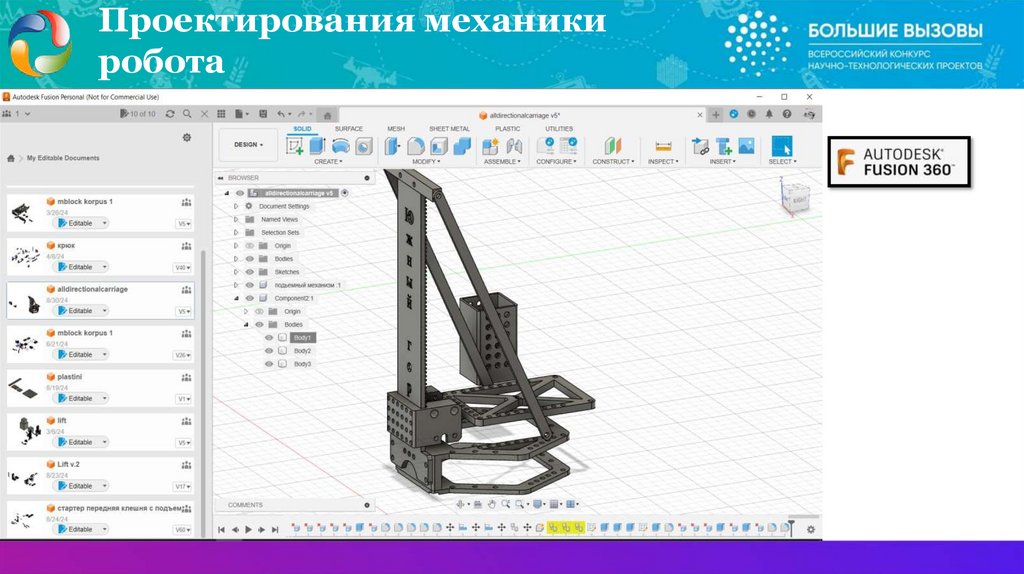
9.
Проектирования механикиробота
10. Основной набор
Ресурсный набор отMakeblock с модулями
нового типа mBuild
предназначен для
изучения функций
искусственного
интеллекта
11. Выбор компонентов
Центр тяжести шассиУниверсальные колеса
Результирующая сила
Движение силы
12.
Постановка целиразработка робота
Проект «РОБОТ МАНИПУЛЯТОР»
включает в себя несколько этапов
конструирования
13. Первый этап: сборка конструкции
14. Второй этап: подключение электронной цепи
• 3синих
мотора (для
движения)
• CyberPi
• 1
мотор
постоянного
тока
(для
изменения
положения
клешни)
• 2 сервопривада(для
открытия/закрвтия
клешни)
15. Среда программирования
mBlock 5Визуальная среда
программирования на основе Scratch
Возможность переключения на язык
высокого уровня Python/Arduino C
Поддержка всех роботов от
компании Makeblock и не только
16. Третий этап: Программирование
Передвижение иуправление
переменными
Пример смещения по
гироскопу налево
Управление стрелой и
открытие/закрытие захвата
17. Всероссийский конкурс научно-технологических проектов
«Большие вызовы»Оптимизация траектории
движения робота-манипулятора
для минимизации времени
выполнения задач
Выполнил: ученик 7ф класса Круглов Максим
Научный руководитель: Потаповой С.А, учитель
информатики