








 Механика
МеханикаПохожие презентации:








")

Ходовое оборудование. Гусеничное ходовое оборудование
1. Ходовое оборудование Гусеничное ходовое оборудование
ПреимуществаНедостатки
•высокая проходимость
• возможность преодоления
больших уклонов
•хорошая устойчивость
• малое давление на
основание (0,04-0,1 МПа)
•большая масса (с нижней
рамой – до 30-40% массы
машины)
• сложность конструкции
•быстрый износ деталей
• малые транспортные
скорости
•большое сопротивление
передвижению
Используется на всех видах МЗР, не требующих больших и
частых перемещений с большой скоростью.
2.
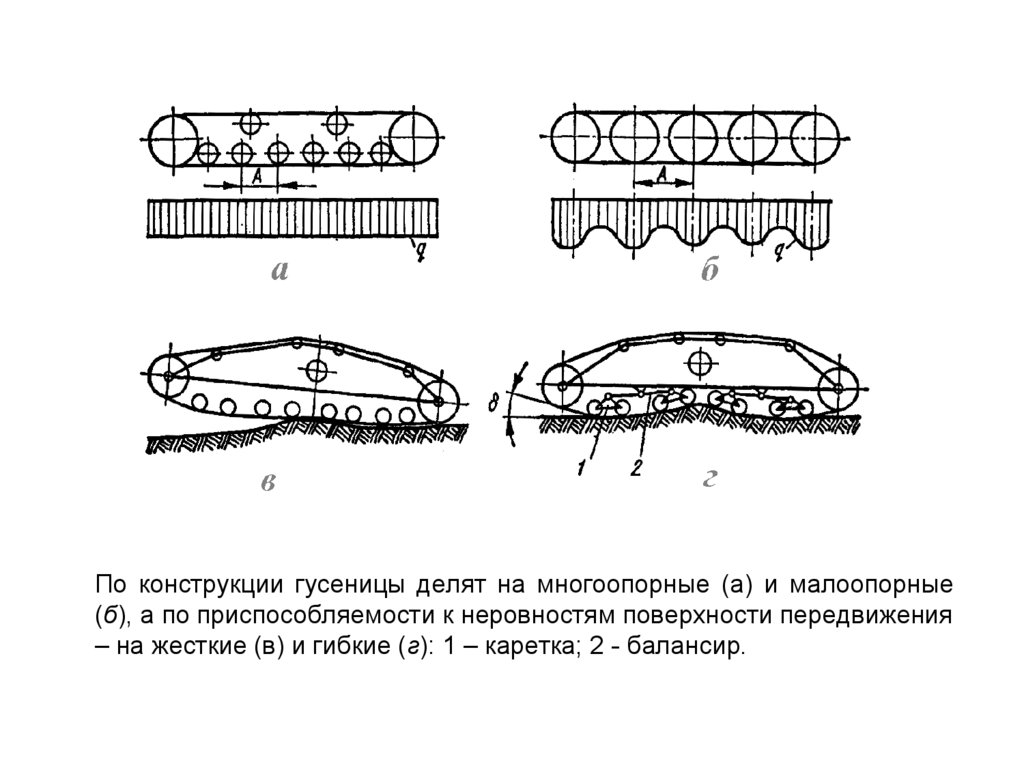
По конструкции гусеницы делят на многоопорные (а) и малоопорные(б), а по приспособляемости к неровностям поверхности передвижения
– на жесткие (в) и гибкие (г): 1 – каретка; 2 - балансир.
3.
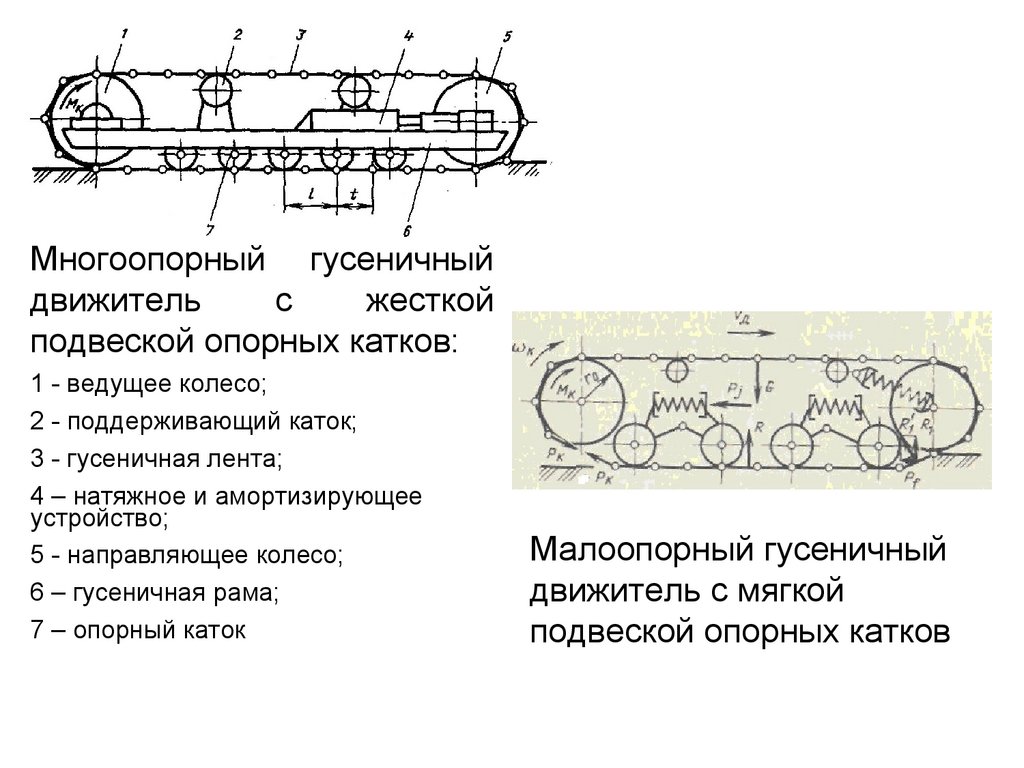
Многоопорный гусеничныйдвижитель
с
жесткой
подвеской опорных катков:
1 - ведущее колесо;
2 - поддерживающий каток;
3 - гусеничная лента;
4 – натяжное и амортизирующее
устройство;
5 - направляющее колесо;
6 – гусеничная рама;
7 – опорный каток
Малоопорный гусеничный
движитель с мягкой
подвеской опорных катков
4.
Многоопорные гусеницы имеют много катков небольшогодиаметра, соединенных с гусеничной рамой. Этот тип подвески
наиболее прост и дешев. Он обеспечивает равномерное
распределение давления на грунт, однако такую подвеску
применяют при скоростях движения до 5 км/ч, т.к. жесткая
гусеница не приспосабливается к неровностям и не
амортизирует возникающие при этом толчки и удары.
Малоопорные гусеницы отличаются малым числом опорных
катков большого диаметра и неравномерностью распределения
давления на основание по их длине. Они лучше
приспосабливается к неровностям поверхности. Этими
качествами обладают и многоопорные гусеницы, у которых
опорные катки малого диаметра соединяют в балансирные
тележки (гибкая многоопорная гусеница) или вводят
демпфирующие устройства - пружины и рессоры.
Для работы машин на грунтах со слабой несущей способностью
начинают применять резинометаллические гусеницы. Такая
гусеница представляет собой специальную резиновую ленту,
армированную высокопрочной проволокой со штампованными
звеньями.
Она
имеет
меньшую
массу,
лучше
приспосабливается к грунтовым условиям, что значительно
улучшает проходимость машины.
5.
6.
7. Давление гусениц на грунт
Малоопорныегусеницы
–
принимается, что давление
условно передается через
звенья,
лежащие
под
катками
p
Смещение центра давления
L
G
2nк bl зв
t катк
1,5
Многоопорные гусеницы
t зв
G
p
2bLгус
Промышленные тракторы – р=0,04…
0,085 МПа
Тракторы с болотными гусеницами р=0,015…0,025 МПа
Х=0
Х<1/6 L
Х=1/6 L
Х>1/6 L
8.
У гусеничного ходового оборудования сопротивлениепередвижению машины в значительной степени
зависит от внутреннего сопротивления гусениц,
которое слагается из сил сопротивления в
подшипниках
опорных
катков,
ведущих
и
направляющих колес, катанию опорных катков,
изгибанию гусеничных цепей на ведущих и
направляющих колесах, движению верхней части
цепи по поддерживающим каткам.
Поскольку сопротивление передвижению машины Pf
зависит еще и от состояния опорной поверхности,
то для практических расчетов используется
коэффициент сопротивления передвижению f,
полученный на основании экспериментальных
испытаний.
Тогда Pf Gf
(f=0,07…0,1 для грунта, за исключением песка)
9.
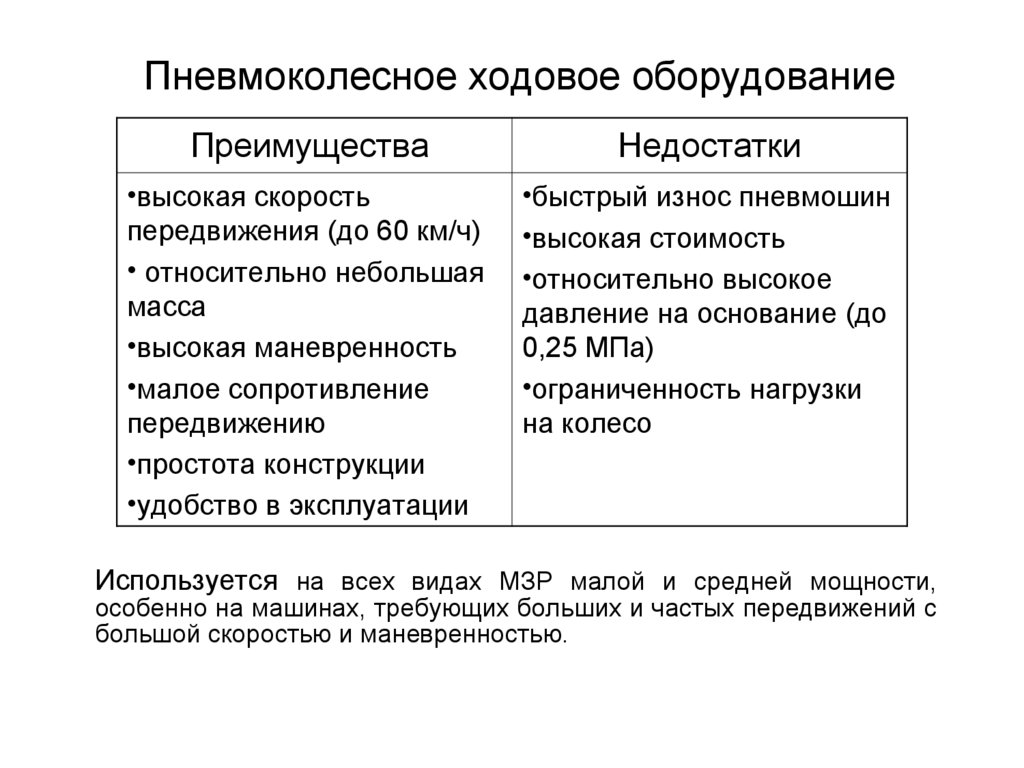
Пневмоколесное ходовое оборудованиеПреимущества
Недостатки
•высокая скорость
передвижения (до 60 км/ч)
• относительно небольшая
масса
•высокая маневренность
•малое сопротивление
передвижению
•простота конструкции
•удобство в эксплуатации
•быстрый износ пневмошин
•высокая стоимость
•относительно высокое
давление на основание (до
0,25 МПа)
•ограниченность нагрузки
на колесо
Используется на всех видах МЗР малой и средней мощности,
особенно на машинах, требующих больших и частых передвижений с
большой скоростью и маневренностью.
10.
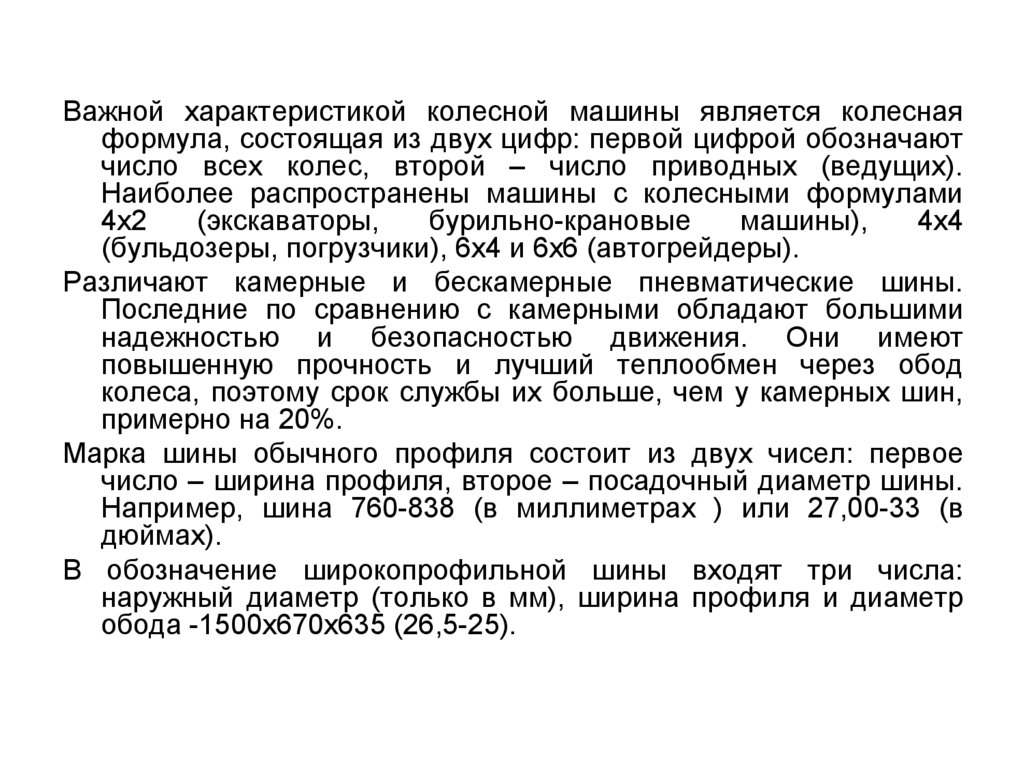
Важной характеристикой колесной машины является колеснаяформула, состоящая из двух цифр: первой цифрой обозначают
число всех колес, второй – число приводных (ведущих).
Наиболее распространены машины с колесными формулами
4х2
(экскаваторы,
бурильно-крановые
машины),
4х4
(бульдозеры, погрузчики), 6х4 и 6х6 (автогрейдеры).
Различают камерные и бескамерные пневматические шины.
Последние по сравнению с камерными обладают большими
надежностью и безопасностью движения. Они имеют
повышенную прочность и лучший теплообмен через обод
колеса, поэтому срок службы их больше, чем у камерных шин,
примерно на 20%.
Марка шины обычного профиля состоит из двух чисел: первое
число – ширина профиля, второе – посадочный диаметр шины.
Например, шина 760-838 (в миллиметрах ) или 27,00-33 (в
дюймах).
В обозначение широкопрофильной шины входят три числа:
наружный диаметр (только в мм), ширина профиля и диаметр
обода -1500х670х635 (26,5-25).
11.
Типы шин:а
–
камерные;
б
–
бескамерные; в – типы
протекторов; I – для земляных
работ; II – для работы в
каменных карьерах; III –
противобуксующие;
IV
–
универсальные; г – арочные;
д – основные размеры; е –
зависимость
допустимой
нагрузки
на
колесо
от
скорости движения; 1 –
покрышка; 2 – камера; 3 –
ободная лента; 4 – вентиль; 5
– полость покрышки; 6 –
герметичный обод.
На МЗР – шины низкого давления
рв =0,12…0,25 МПа.
Давление шин на грунт p p в
12.
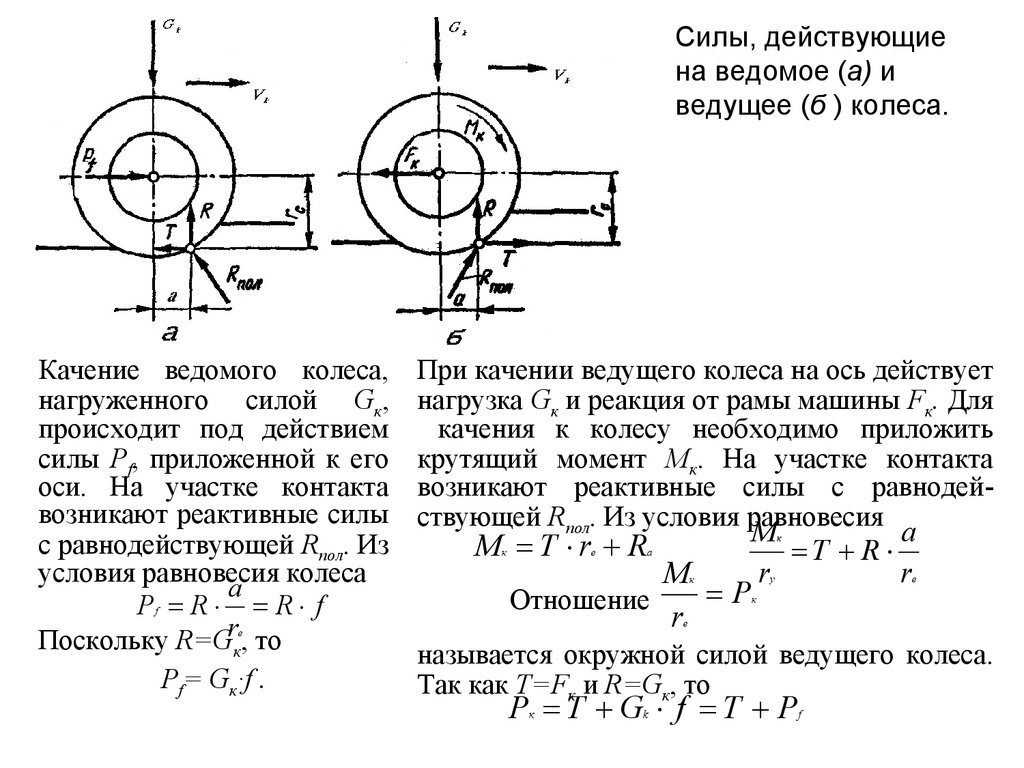
Силы, действующиена ведомое (а) и
ведущее (б ) колеса.
Качение ведомого колеса,
нагруженного силой Gк,
происходит под действием
силы Pf, приложенной к его
оси. На участке контакта
возникают реактивные силы
с равнодействующей Rпол. Из
условия равновесия колеса
a
P R R f
Поскольку R=Grк, то
Pf= Gк·f .
f
e
При качении ведущего колеса на ось действует
нагрузка Gк и реакция от рамы машины Fк. Для
качения к колесу необходимо приложить
крутящий момент Мк. На участке контакта
возникают реактивные силы с равнодействующей Rпол. Из условия равновесия
М
a
М Т r R
Т R
r
r
М
Р
Отношение
к
к
e
a
к
r
у
e
к
e
называется окружной силой ведущего колеса.
Так как Т=Fк и R=Gк, то
Р Т G f T P
к
k
f
13.
Таким образом, окружная сила ведущего колесарасходуется
на
преодоление
сопротивления
передвижению (Pf) и создание силы тяги (Т).
P
a
f
Коэффициент сопротивления качению f rc или
R
- величина переменная, зависящая от давления
воздуха в шине, состояния грунта и ряда других
факторов.
В
практических
расчетах
его
принимают
по
экспериментальным данным для данных колес и
грунта (0,06…0,2).
Приближенные значения силового радиуса колесного
движителя находятся по зависимостям:
- на плотном грунте rс=r-(0,12…0,15)·bк;
- на рыхлом грунте rс=r-(0,08…0,10)·bк
где r – радиус недеформируемого профиля шины
(паспортный); bк –ширина профиля шины.
f
14.
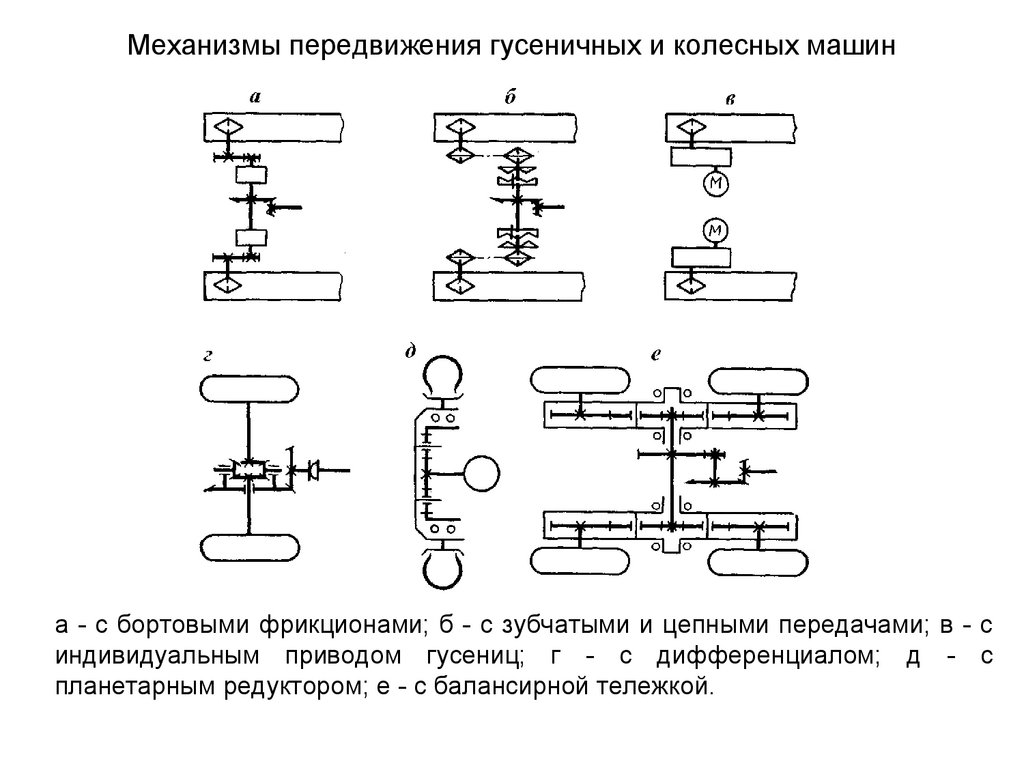
Механизмы передвижения гусеничных и колесных машина - с бортовыми фрикционами; б - с зубчатыми и цепными передачами; в - с
индивидуальным приводом гусениц; г - с дифференциалом; д - с
планетарным редуктором; е - с балансирной тележкой.
15.
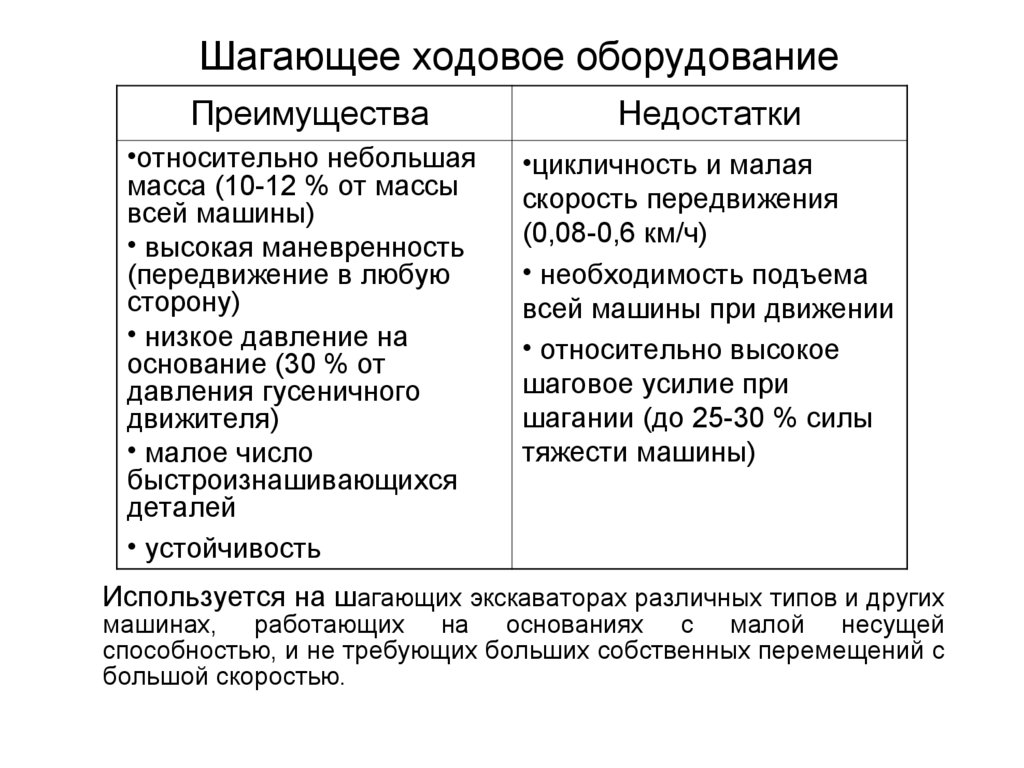
Шагающее ходовое оборудованиеПреимущества
Недостатки
•относительно небольшая
масса (10-12 % от массы
всей машины)
• высокая маневренность
(передвижение в любую
сторону)
• низкое давление на
основание (30 % от
давления гусеничного
движителя)
• малое число
быстроизнашивающихся
деталей
• устойчивость
•цикличность и малая
скорость передвижения
(0,08-0,6 км/ч)
• необходимость подъема
всей машины при движении
• относительно высокое
шаговое усилие при
шагании (до 25-30 % силы
тяжести машины)
Используется на шагающих экскаваторах различных типов и других
машинах, работающих на основаниях с малой несущей
способностью, и не требующих больших собственных перемещений с
большой скоростью.
16. Шагающее ходовое оборудование
направление движенияс гидравлическим механизмом шагания
направление движения
с эксцентриковым механизмом шагания
17.
Шагающий экскаватор с кривошипно-шарнирным механизмомшагания
18.
19.
Шагающий экскаватор с гидравлическим механизмом шагания20.
21.
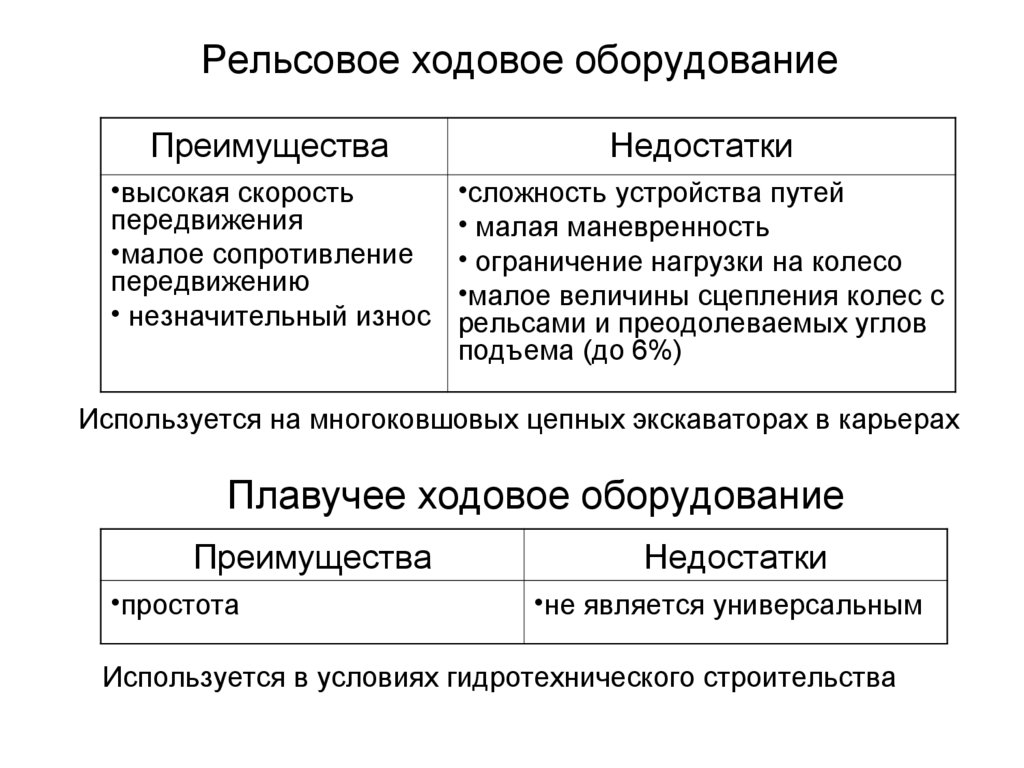
Рельсовое ходовое оборудованиеПреимущества
Недостатки
•высокая скорость
передвижения
•малое сопротивление
передвижению
• незначительный износ
•сложность устройства путей
• малая маневренность
• ограничение нагрузки на колесо
•малое величины сцепления колес с
рельсами и преодолеваемых углов
подъема (до 6%)
Используется на многоковшовых цепных экскаваторах в карьерах
Плавучее ходовое оборудование
Преимущества
•простота
Недостатки
•не является универсальным
Используется в условиях гидротехнического строительства
22. Основы тяговых расчетов МЗР
В рабочем и транспортном режимах на машину действуют силыкак препятствующие, так и способствующие ее движению.
Основной задачей тяговых расчетов является определение
силы тяги, необходимой для преодоления рабочих и
транспортных сопротивлений.
В общем случае на машину действуют следующие силы
сопротивления (касательные к направлению движения ):
• PPO – сила, действующая на рабочий орган (рабочее
сопротивление);
• Рf – сила сопротивления передвижению машины;
• Рi – сила сопротивления, действующая при преодолении
подъемов;
• Рj – сила инерции машины;
• Рω – сила сопротивления воздуха.
23.
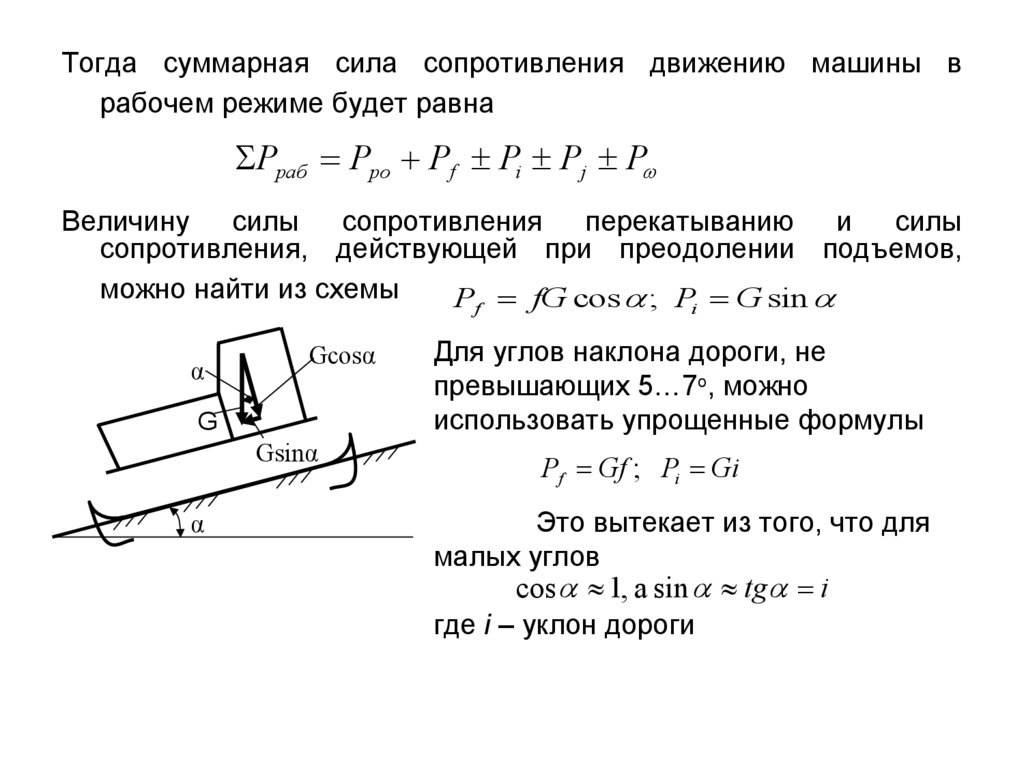
Тогда суммарная сила сопротивления движению машины врабочем режиме будет равна
Pраб Ppo Pf Pi Pj P
Величину силы сопротивления перекатыванию и силы
сопротивления, действующей при преодолении подъемов,
можно найти из схемы
P fG cos ; P G sin
f
α
Gcosα
G
Gsinα
α
i
Для углов наклона дороги, не
превышающих 5…7о, можно
использовать упрощенные формулы
Pf Gf ; Pi Gi
Это вытекает из того, что для
малых углов
cos 1, а sin tg i
где i – уклон дороги
24.
v рабdv
M
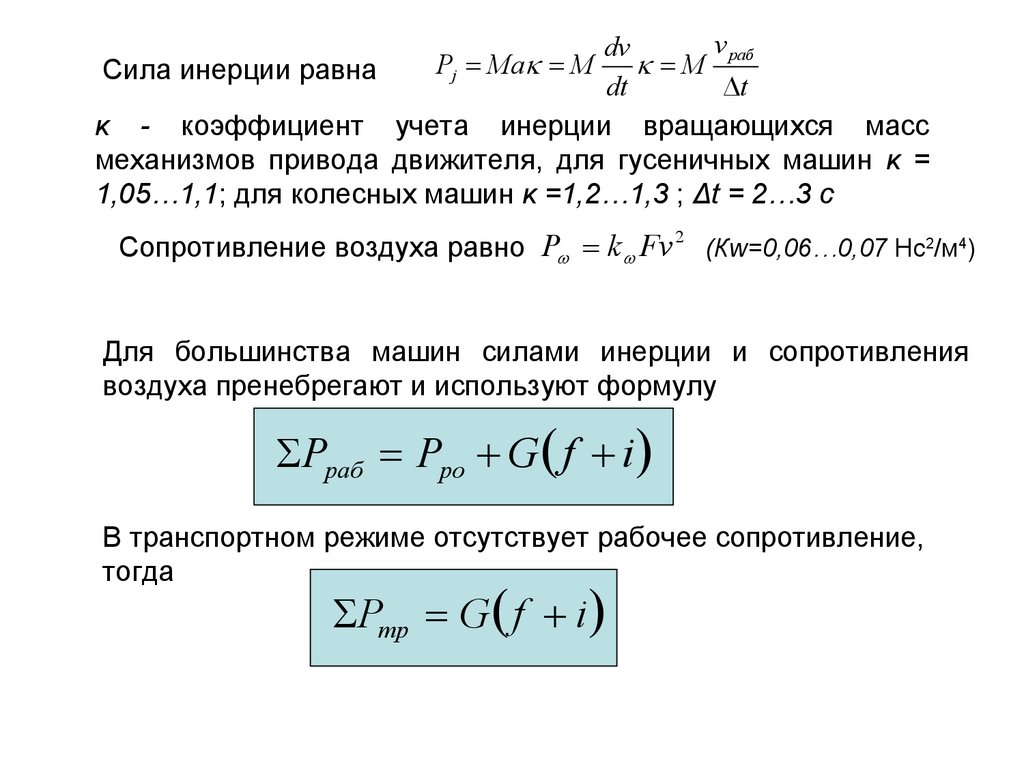
Сила инерции равна
dt
t
κ - коэффициент учета инерции вращающихся масс
механизмов привода движителя, для гусеничных машин κ =
1,05…1,1; для колесных машин κ =1,2…1,3 ; Δt = 2…3 с
Pj Ma M
Сопротивление воздуха равно P k Fv 2 (Кw=0,06…0,07 Нс2/м4)
Для большинства машин силами инерции и сопротивления
воздуха пренебрегают и используют формулу
Pраб Ppo G f i
В транспортном режиме отсутствует рабочее сопротивление,
тогда
Pтр G f i
25.
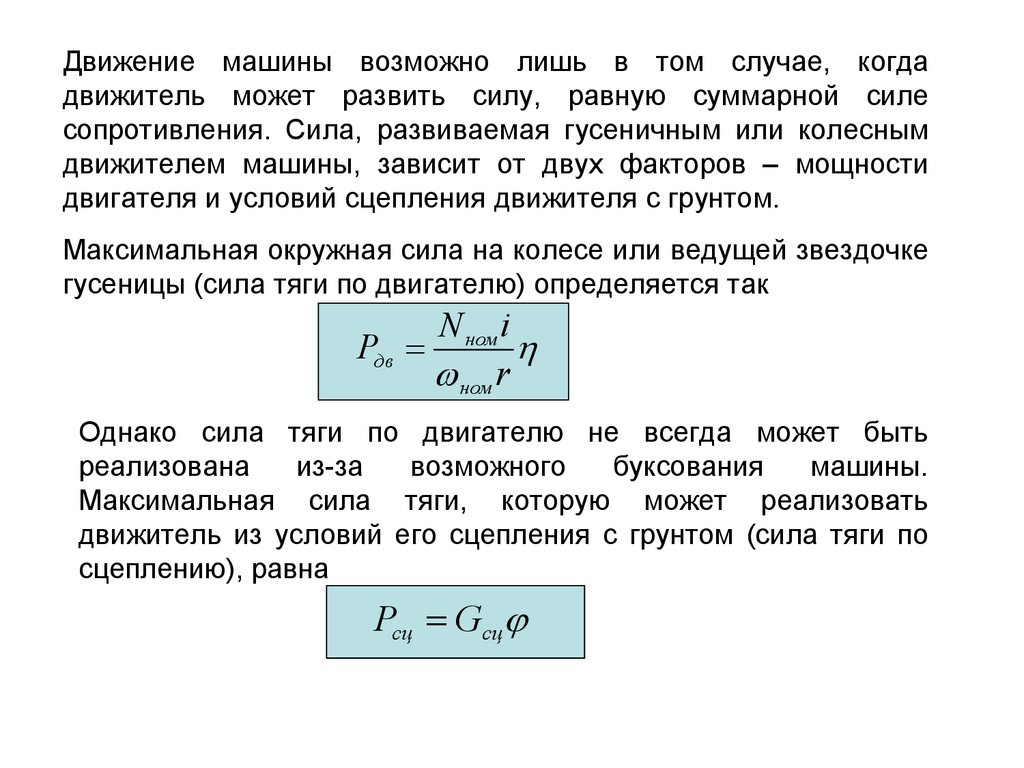
Движение машины возможно лишь в том случае, когдадвижитель может развить силу, равную суммарной силе
сопротивления. Сила, развиваемая гусеничным или колесным
движителем машины, зависит от двух факторов – мощности
двигателя и условий сцепления движителя с грунтом.
Максимальная окружная сила на колесе или ведущей звездочке
гусеницы (сила тяги по двигателю) определяется так
Pдв
N ном i
ном r
Однако сила тяги по двигателю не всегда может быть
реализована
из-за
возможного
буксования
машины.
Максимальная сила тяги, которую может реализовать
движитель из условий его сцепления с грунтом (сила тяги по
сцеплению), равна
Pсц Gсц
26.
Таким образом, движение машины возможно привыполнении следующих условий
P Pдв
P Pсц
Если не будет выполняться первое условие, двигатель машины
остановится, если второе – машина будет буксовать.
Потребная мощность двигателя будет равна
В рабочем режиме
Nр
Pраб v раб
В транспортном режиме
N тр
Pтр vтах