









 Промышленность
ПромышленностьПохожие презентации:







")


Система корекції траекторії руху літального апарату за наземними просторовими орієнтирами
1. МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ДЕРЖАВНИЙ УНІВЕРСИТЕТ «КИЇВСЬКИЙ АВІАЦІЙНИЙ ІНСТИТУТ» ФАКУЛЬТЕТ АЕРОНАВІГАЦІЇ, ЕЛЕКТРОНІКИ
ТА ТЕЛЕКОМУНІКАЦІЙКАФЕДРА АВІОНІКИ ТА СИСТЕМ УПРАВЛІННЯ
Система корекції траекторії руху літального апарату за наземними
просторовими орієнтирами
2025
Виконав: Поспєлов В.М.
Науковий керівник: О.О. Чужа
2.
Проблема: Системи IRS мають властивість з часом накопичувати помилки розрахунку шляху, якікоригуються СНС, однак ненадійна робота в районах з нестабільним супутниковим пеленгуванням, а
також можливість навмисного або випадкового глушіння радіосигналу супутника вимагають
розробки і впровадження альтернативних навігаційних систем, які враховують ці ризики.
Мета дипломної роботи: забезпечення надлишковості навігаційної інформації шляхом
реалізації автоматизованої та автономної навігаційної системи на основі оглядово-порівняльного
методу навігації шляхом формування тривимірного зображення земної поверхні.
2
3. Суть оглядово-порівняльного методу навігації полягає в визначенні місцезнаходження повітряного судна шляхом порівняння наземних
Оглядово-порівняльний метод навігаціїСучасні оглядово порівняльні навігаційні системи (далі – ОПНС) забезпечують інтегроване
відтворення повного набору навігаційних даних, взаємодіють з бортовими комп'ютерними
системами та здатні коригувати інші датчики й системи навігаційної інформації.
Суть оглядово-порівняльного методу навігації полягає в визначенні місцезнаходження
повітряного судна шляхом порівняння наземних або небесних орієнтирів, координати яких відомі,
зображені на карті або збережені в пам'яті навігаційної обчислювальної техніки, з їх фактичним
спостережуваним виглядом, і в разі збігу з заданою ймовірністю визначити координати ПС.
Переваги оглядово порівняльного методу навігації:
- відсутність необхідності в наземних радіостанціях або космічному обладнанні;
- висока точність вимірювань, а також високий рівень надмірності навігаційної інформації;
- можливість проведення вимірювань в будь-якій точці Землі та навколоземного простору;
- відсутність накопичених похибок та зменшення впливу перешкод у порівнянні з іншим
системами навігації;
- можливість використовувати засоби автоматичної навігації.
3
4. Принцип роботи ОПНС
Зображення місцевості містить дуже великий обсяг інформації, обробка якої збільшуєчас прийняття рішення про визначення координат літака, тому порівнюється не зображення
місцевості, а окремі об'єкти (орієнтири) на ній. Таким чином, основним завданням системи
є пошук на спостережуваній поверхні землі об'єктів, схожих на орієнтири, координати яких
зберігаються в обчислювальному пристрої.
ДПКМ – датчик поточної карти місцевості;
ДЕКМ – датчик еталонної карти місцевості;
ФПКМ – формувач поточної карти місцевості;
ПП – пристрій порівняння;
ВП – пристрій вирішення.
Схема роботи ОПНС з корекцією ІНС
4
5. Основні характеристики та особливості датчиків ОПНС
Для реалізації системи можна використати: лазерні,інфрачервоні, телевізійні та радіолокаційні датчики.
Інфрачервоні датчики - використовують інфрачервоне
випромінювання або теплове випромінювання тіл.
Телевізійні датчики виявляють особливості на основі
різниці в яскравості між об'єктом і навколишнім
середовищем.
У радіолокаційних датчиках виокремлення особливостей
базується на обробці сигналів, відбитих від радіоконтрастних
об'єктів.
Лазерні датчики дають можливість створювати лазерні
системи навігації, які виокремлюють особливості на основі
побудови двовимірних (2D) і тривимірних (3D) зображень
об'єктів.
3D LiDAR зображення
5
6. Система формування тривимірного зображення наземних опорних точок на основі LiDAR
LiDAR - це локатор активного типу для вимірюваннявідстані, який дозволяє реалізувати метод лазерної
стереометрії, що є прямим методом вимірювання
тривимірної форми та розмірів об'єкта спостереження.
Вона оцінює тривалість поширення лазерного
променя до об'єкта і назад. Використовуючи
значення швидкості світла, система обчислює
відстань до кожного елемента опромінюваного
об'єкта. Ця операція відбувається миттєво, що
полегшує збір точних даних про місцезнаходження і
рух об'єктів у просторі.
Оптична система передавача системи складається з:
лазерного джерела, оптичної лінзи, поляризаційного
світлодільника і сканера.
6
7.
МПВОб’єктив
τ1
dS
τ2
τi
Об’єкт
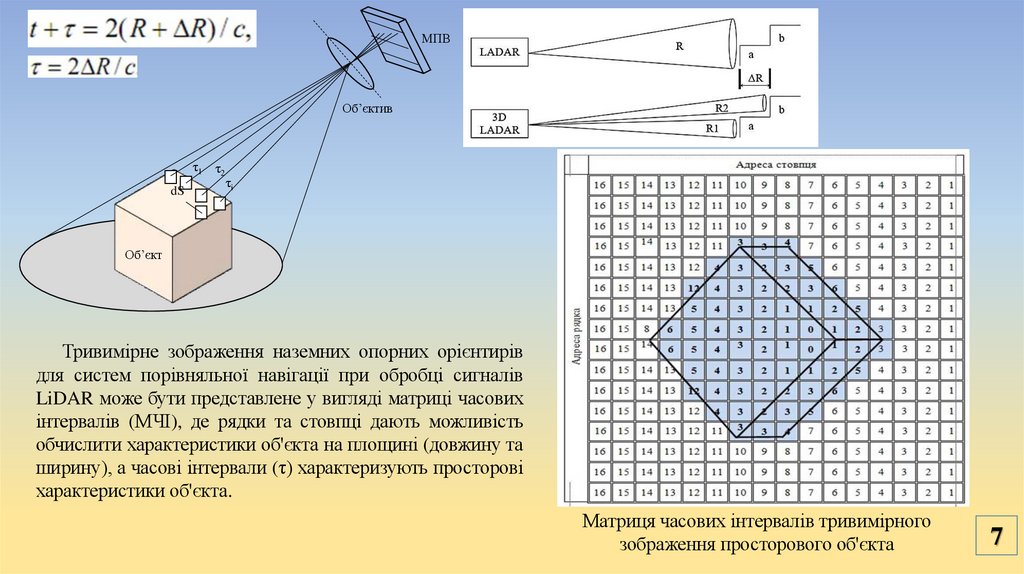
Тривимірне зображення наземних опорних орієнтирів
для систем порівняльної навігації при обробці сигналів
LiDAR може бути представлене у вигляді матриці часових
інтервалів (МЧІ), де рядки та стовпці дають можливість
обчислити характеристики об'єкта на площині (довжину та
ширину), а часові інтервали (τ) характеризують просторові
характеристики об'єкта.
Матриця часових інтервалів тривимірного
зображення просторового об'єкта
7
8. Розпізнавання навігаційних орієнтирів у системах оглядово-порівняльної навігації
Відповідно методу похідної, похідна (f ‘(x)) функції (f(x))є кутовим коефіцієнтом дотичної лінії до графіка функції (y
= f(x)) у точці (A (x, y)).
Тривимірне зображення об'єкта містить всю
інформацію, необхідну для його розпізнавання.
Аналізуючи 3D-зображення, можна отримати всі ті ж
характеристики, що і при обробці 2D-зображень, а
також додаткові характеристики об'єкта, що виникають
завдяки його тривимірній природі.
Ці додаткові характеристики: об'єм паралелепіпеда,
що описує розпізнаний об'єкт (а), об'єм самого об'єкта
(б), об'єм геометричних фігур, що складають об'єкт (в),
і його середню висоту (г).
Кутовий коефіцієнт дотичної лінії виражається як
тангенс кута між нею (α') і віссю OX. Дотична до функції
f(x) є прямою лінією.
8
9.
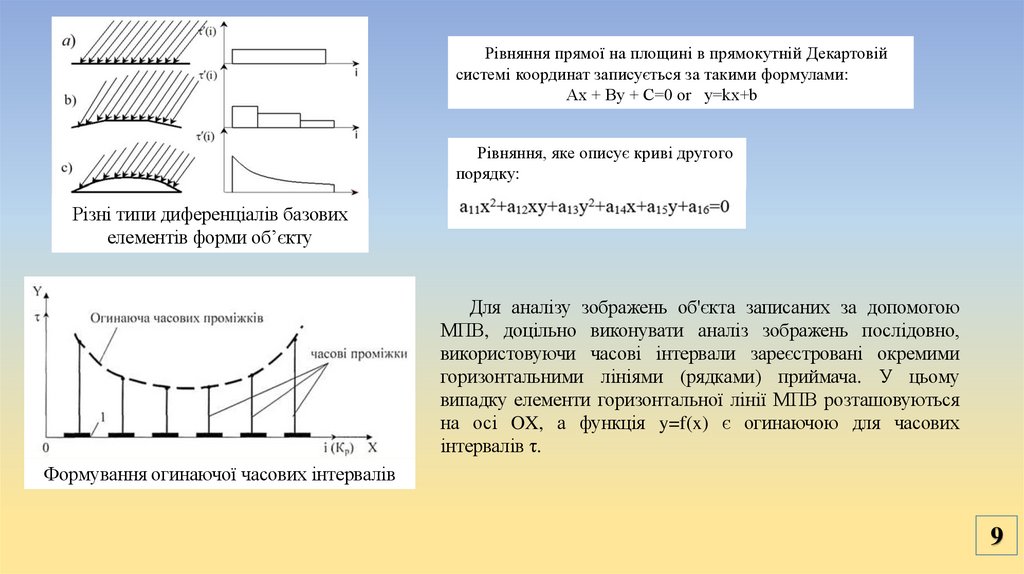
Рівняння прямої на площині в прямокутній Декартовійсистемі координат записується за такими формулами:
Aх + Ву + C=0 or у=kх+b
Рівняння, яке описує криві другого
порядку:
Різні типи диференціалів базових
елементів форми об’єкту
Для аналізу зображень об'єкта записаних за допомогою
МПВ, доцільно виконувати аналіз зображень послідовно,
використовуючи часові інтервали зареєстровані окремими
горизонтальними лініями (рядками) приймача. У цьому
випадку елементи горизонтальної лінії МПВ розташовуються
на осі OX, а функція y=f(x) є огинаючою для часових
інтервалів τ.
Формування огинаючої часових інтервалів
9
10.
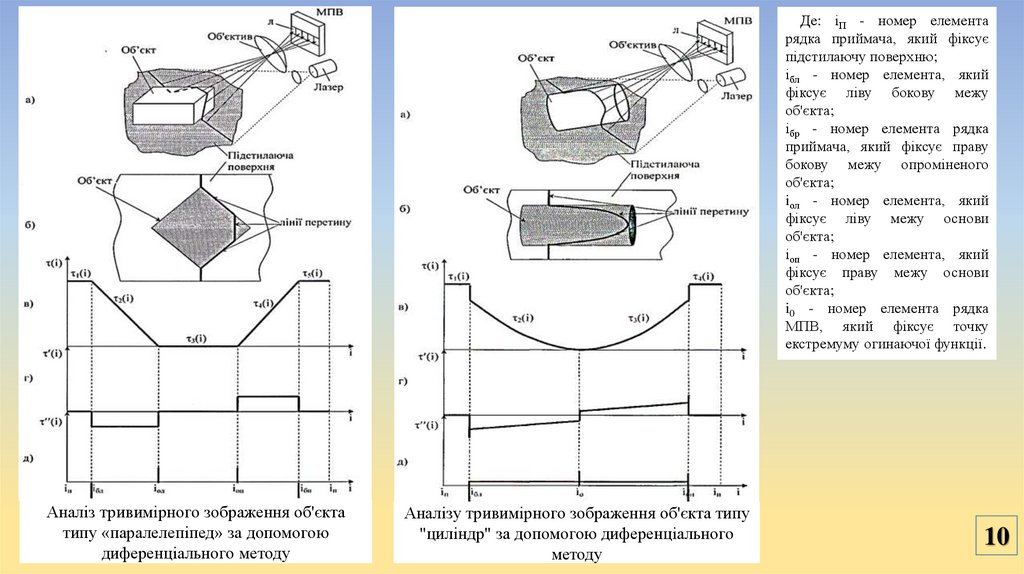
Де: іП - номер елементарядка приймача, який фіксує
підстилаючу поверхню;
ібл - номер елемента, який
фіксує ліву бокову межу
об'єкта;
ібр - номер елемента рядка
приймача, який фіксує праву
бокову межу опроміненого
об'єкта;
iол - номер елемента, який
фіксує ліву межу основи
об'єкта;
іоп - номер елемента, який
фіксує праву межу основи
об'єкта;
i0 - номер елемента рядка
МПВ, який фіксує точку
екстремуму огинаючої функції.
Аналіз тривимірного зображення об'єкта
типу «паралелепіпед» за допомогою
диференціального методу
Аналізу тривимірного зображення об'єкта типу
"циліндр" за допомогою диференціального
методу
10
11.
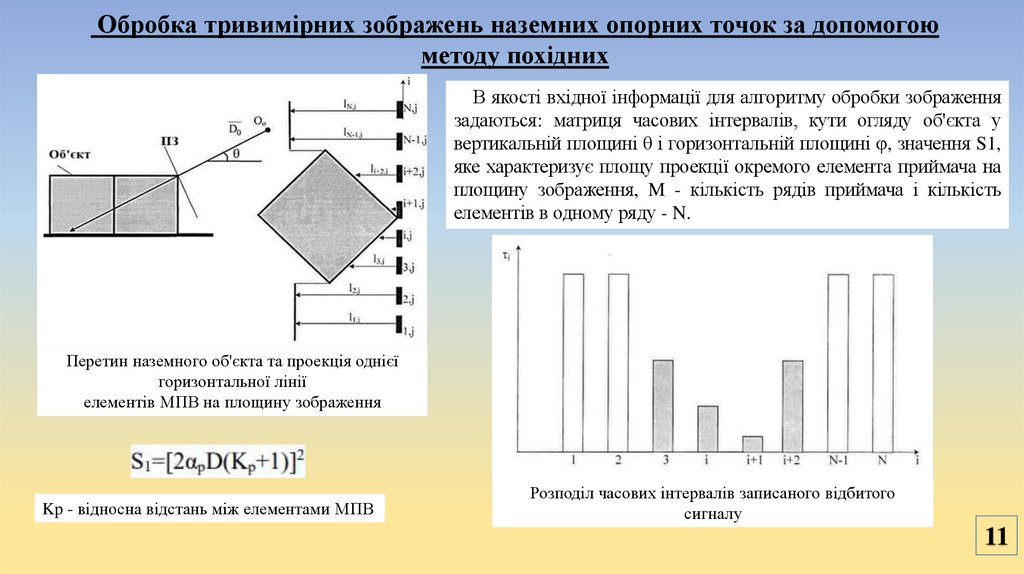
Обробка тривимірних зображень наземних опорних точок за допомогоюметоду похідних
В якості вхідної інформації для алгоритму обробки зображення
задаються: матриця часових інтервалів, кути огляду об'єкта у
вертикальній площині θ і горизонтальній площині φ, значення S1,
яке характеризує площу проекції окремого елемента приймача на
площину зображення, M - кількість рядів приймача і кількість
елементів в одному ряду - N.
Перетин наземного об'єкта та проекція однієї
горизонтальної лінії
елементів МПВ на площину зображення
Kp - відносна відстань між елементами МПВ
Розподіл часових інтервалів записаного відбитого
сигналу
11
12.
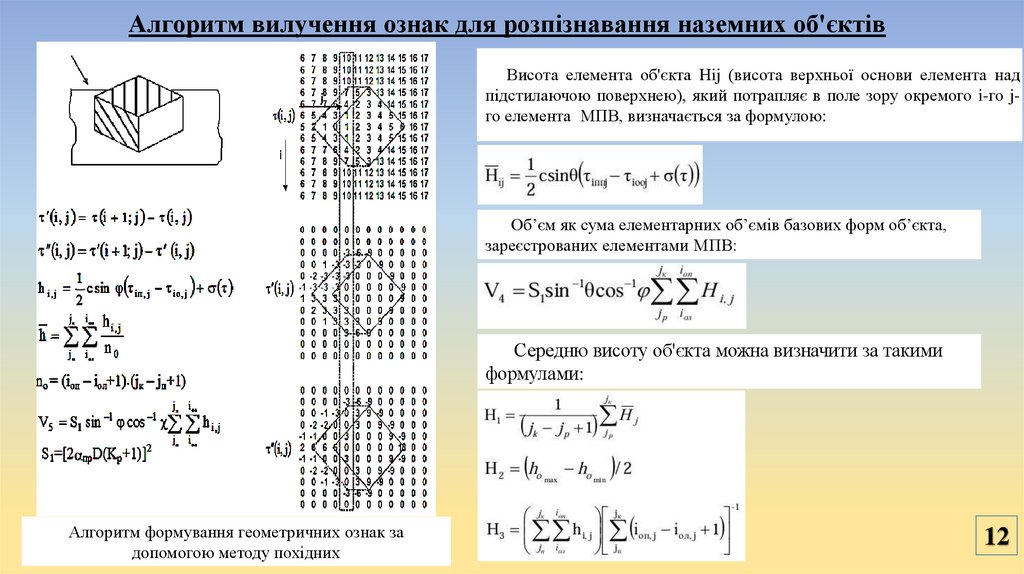
Алгоритм вилучення ознак для розпізнавання наземних об'єктівВисота елемента об'єкта Hij (висота верхньої основи елемента над
підстилаючою поверхнею), який потрапляє в поле зору окремого i-го jго елемента МПВ, визначається за формулою:
Об’єм як сума елементарних об’ємів базових форм об’єкта,
зареєстрованих елементами МПВ:
Середню висоту об'єкта можна визначити за такими
формулами:
Алгоритм формування геометричних ознак за
допомогою методу похідних
12
13.
Алгоритм формування геометричних ознакНаземні об'єкти розпізнаються за допомогою методу порівняння.
При опроміненні поверхні землі система отримує інформацію у
вигляді матриці часових інтервалів; після сегментації в полі зору
системи залишаються тільки об'єкти, які можуть бути орієнтирами.
Розраховується їх середня висота і об'єм, а також визначається їх
відносне положення (якщо орієнтирів декілька).
Алгоритм класифікації опорних точок
13
14. Розрахунок дальності ЛСФТЗ
Під дальністю дії лазерної системи формуваннятривимірних зображень розуміється така відстань
від ЛСФТЗ до об’єкта, при якій всі елементи
матричного приймача випромінювання (МПВ), на
які фокусується зображення об’єкта, виявляють
відбите випромінювання з заданою ймовірністю.
Для осесиметричного променя дальність ЛСФТЗ
запишеться формулою:
де: І – сила лазерного випромінювання; Sо – площа об’єкту, що фокусується на один елемент МПВ; Sоб – площа об’єктива;
D – дальність від цілі до МПВ; τпер/ τпр – коефіцієнт пропускання передаваючої/приймальної оптики; Тт – коефіцієнт, який
характеризує флуктуації інтенсивності відбитого випромінювання, внаслідок турбулентності атмосфери; τа– коефіцієнт
пропускання лазерного випромінювання атмосферою; ( ) - коефіцієнт дифузного відбиття об’єкту; – кут між напрямком
променя та нормаллю до опроміненої поверхні; W – енергія в імпульсі; τi – тривалість імпульсу; ωпер – плоский кут
розходимості променя; f- фокусна відстань об’єктива; R- проекція відстані найбільш віддаленого елемента об’єкта від осі
пучка; D - дальність від ЛСФТЗ до об’єкта; αв – плоский кут розходимості випромінювання на рівні 1/e.
14
15.
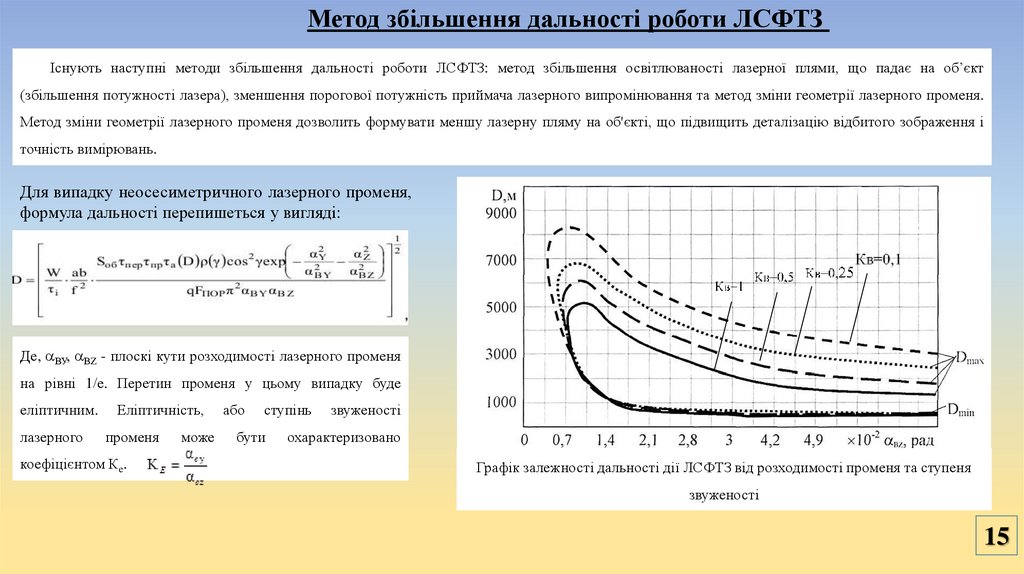
Метод збільшення дальності роботи ЛСФТЗІснують наступні методи збільшення дальності роботи ЛСФТЗ: метод збільшення освітлюваності лазерної плями, що падає на об’єкт
(збільшення потужності лазера), зменшення порогової потужність приймача лазерного випромінювання та метод зміни геометрії лазерного променя.
Метод зміни геометрії лазерного променя дозволить формувати меншу лазерну пляму на об'єкті, що підвищить деталізацію відбитого зображення і
точність вимірювань.
Для випадку неосесиметричного лазерного променя,
формула дальності перепишеться у вигляді:
Де, ВУ, ВZ - плоскі кути розходимості лазерного променя
на рівні 1/е. Перетин променя у цьому випадку буде
еліптичним.
лазерного
Еліптичність,
променя
коефіцієнтом Кe.
може
або
ступінь
бути
звуженості
охарактеризовано
Графік залежності дальності дії ЛСФТЗ від розходимості променя та ступеня
звуженості
15
16.
ВИСНОВОКСучасна оглядово-порівняльна автоматична навігаційна система, заснована на автоматичному датчику зору, може задовольнити
потребу в необхідній надмірності навігаційної інформації.
Порівняльний аналіз показав, що використання лазерного датчика, званого LiDAR, який має можливість формувати 3Dзображення поверхні землі, має найбільший потенціал для впровадження в ОПНС. LiDAR надає найбільший обсяг інформації
порівняно з іншими датчиками і має високу роздільну здатність, що, в свою чергу, підвищує точність розпізнавання об'єктів.
Формування тривимірних зображень опорних точок на поверхні землі, необхідних для завдань розпізнавання, досягається
шляхом їх зондування лазерними імпульсами тривалістю в наносекунди та аналізу просторової і часової структури відбитого
сигналу. Це дозволяє отримати 3D-зображення наземних об'єктів у вигляді матриці часових інтервалів з літака на певній траєкторії,
де елементи матриці, зайняті зображенням об'єкта, визначають інформацію про його геометричні розміри (довжину і ширину), а
інформація про часові інтервали, записані в кожному елементі матриці, визначає його просторові характеристики.
Для аналізу 3D-зображень наземних опорних точок можна використовувати диференціальний метод, який базується на
використанні властивостей похідних першого та другого порядку при застосуванні до функцій, що апроксимують матриці
огинаючих часових інтервалів.
Для класифікації наземних об'єктів пропонується використовувати дві ознаки розпізнавання: об'єм об'єкта та його середню
висоту. За допомогою алгоритму класифікації ознаки опорних точок порівнюються з розрахованими, і якщо ймовірність збігу обох
ознак об'єкта (об'єм і середня висота) та даних плану польоту є високою (більше 0,8), то можна точно вказати положення ПС та
його траекторію.
Проведено підрахунки й визначено, що така лазерна система може створювати цифрове тривимірне зображення наземних
об’єктів неосесиметричним променем з ступенем звуженості Ke= 0,5 на дальностях до 7200 м.
Таким чином, застосування запропонованої ОПНС на основі аналізу тривимірних LiDAR зображень наземних орієнтирів
дозволить автономно визначати місцезнаходження літака і коригувати його траєкторію польоту в режимі реального часу, що
значно підвищить ефективність навігаційних систем заснованих на методах числення шляху, коригуючи накопичувальні з часом
похибки.
16