 Электроника
ЭлектроникаПохожие презентации:




")





Применение магнитного компаса для определения направления движения робота
1.
Основы мехатроникичасть 7.
Применение магнитного компаса для определения
направления движения робота
Автор курса: к.т.н., доцент каф. Энергетики
Струмеляк А.В.
2.
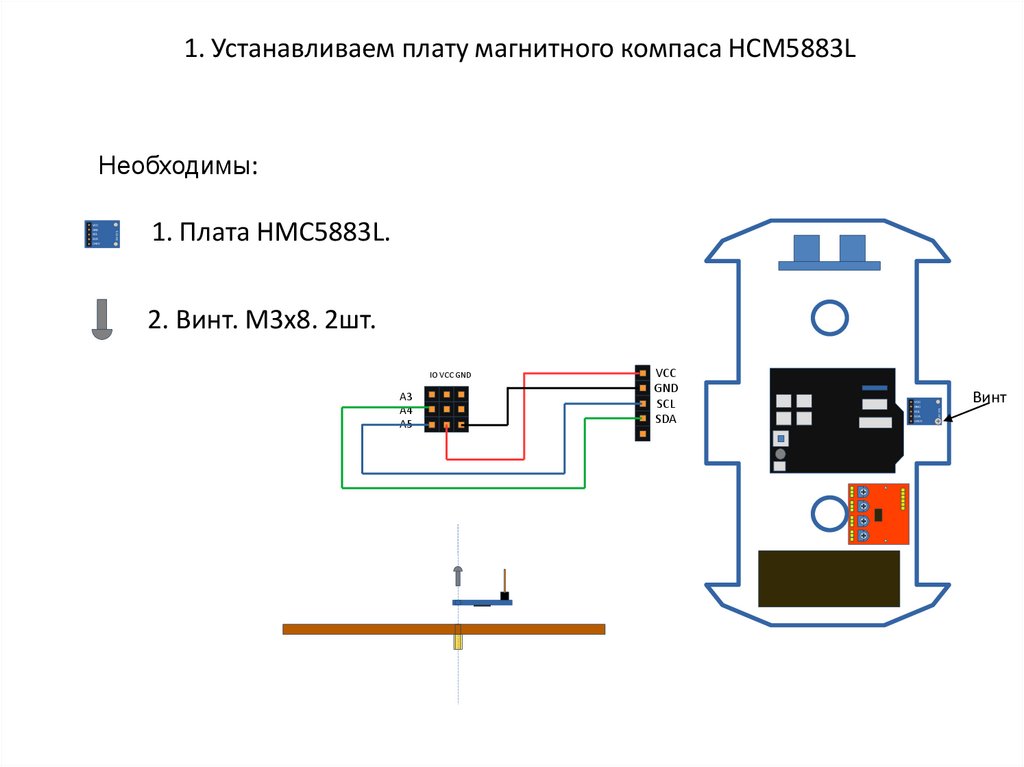
1. Устанавливаем плату магнитного компаса HCM5883LНеобходимы:
SCL
SDA
DRDY
1. Плата HMC5883L.
2. Винт. М3х8. 2шт.
IO VCC GND
A3
A4
A5
VCC
GND
SCL
SDA
Винт
VCC
GND
SCL
SDA
DRDY
GY-273
GND
GY-273
VCC
3.
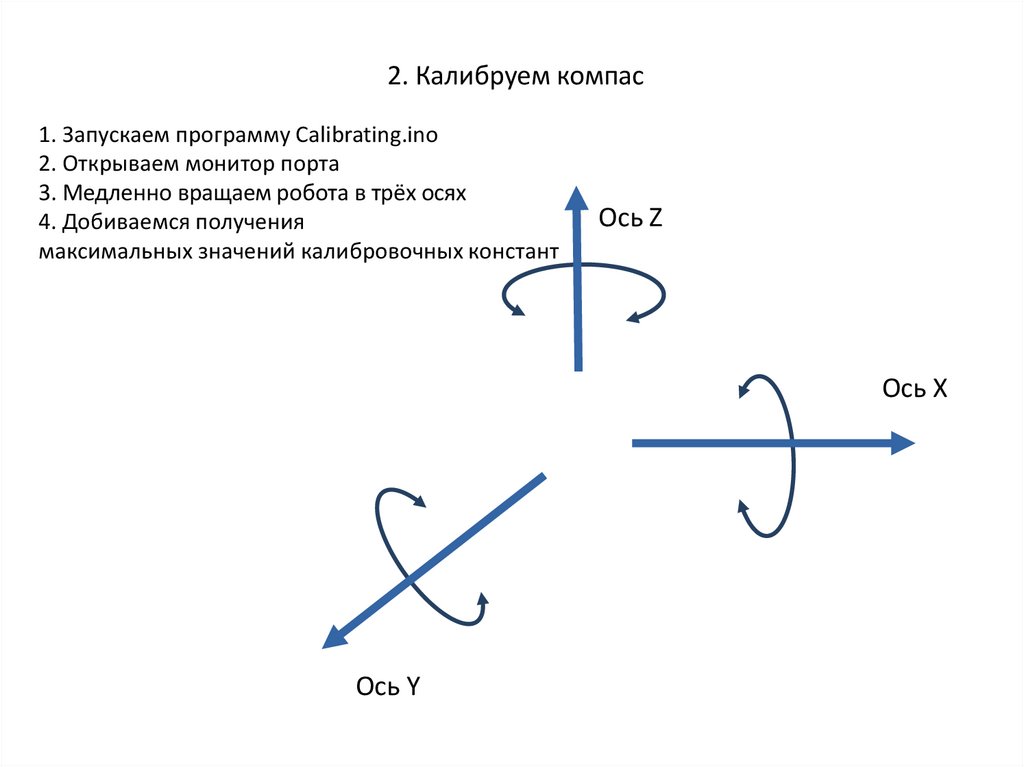
2. Калибруем компас1. Запускаем программу Calibrating.ino
2. Открываем монитор порта
3. Медленно вращаем робота в трёх осях
4. Добиваемся получения
максимальных значений калибровочных констант
Ось Z
Ось X
Ось Y
4.
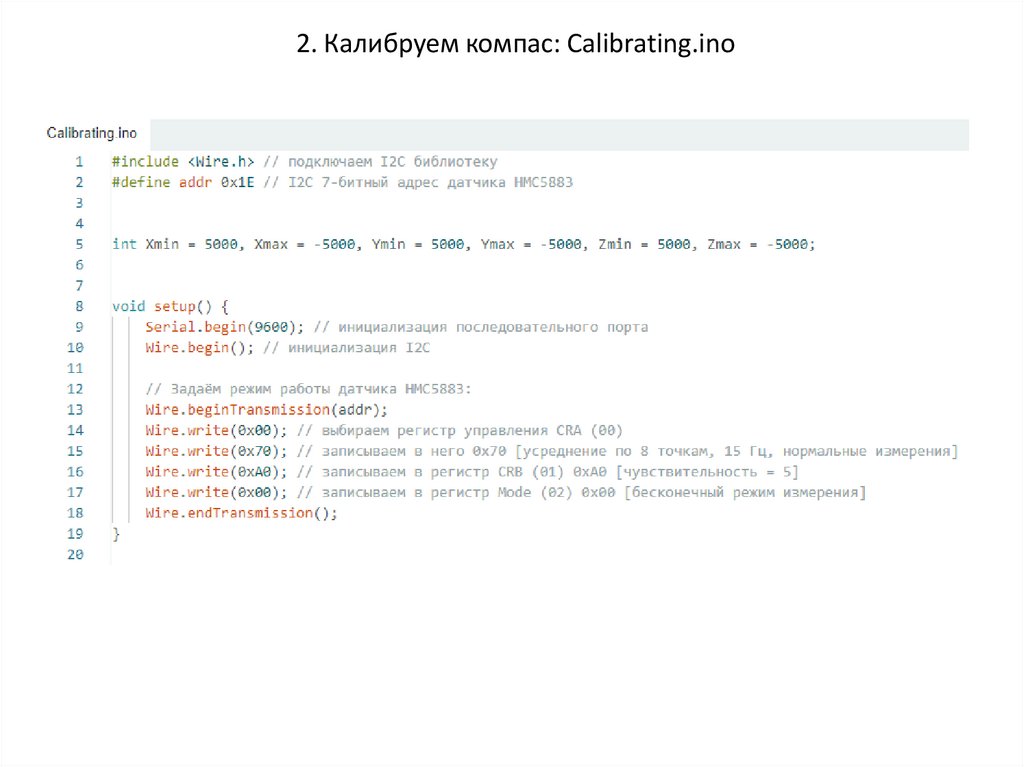
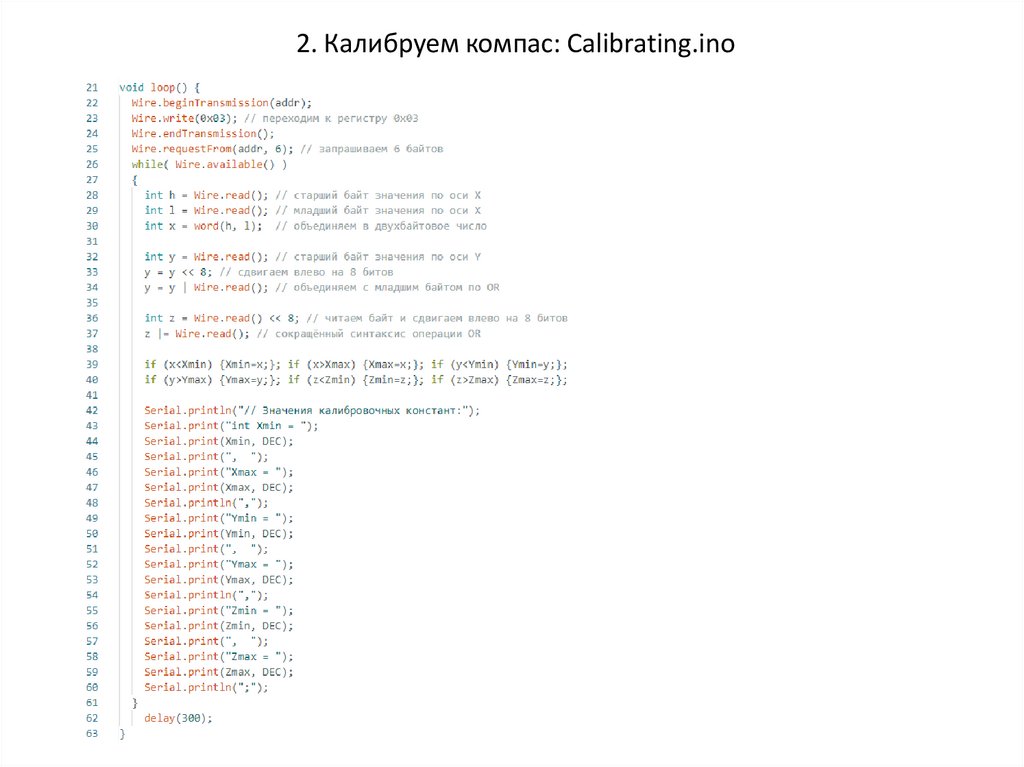
2. Калибруем компас: Calibrating.ino5.
2. Калибруем компас: Calibrating.ino6.
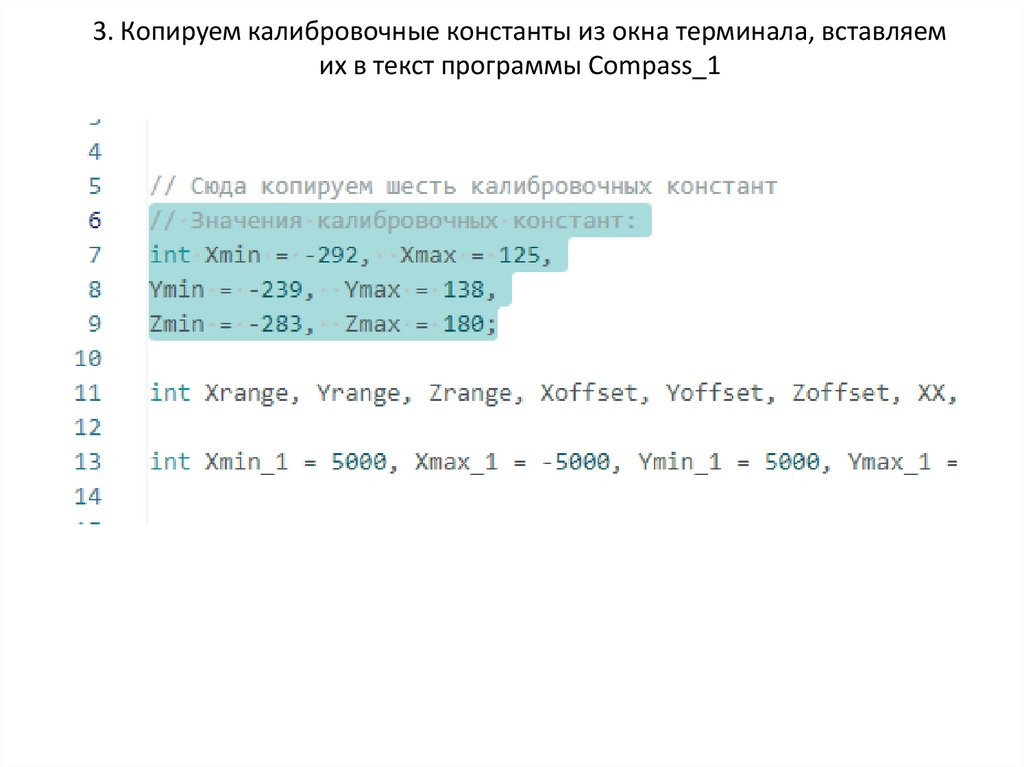
3. Копируем калибровочные константы из окна терминала, вставляемих в текст программы Compass_1
7.
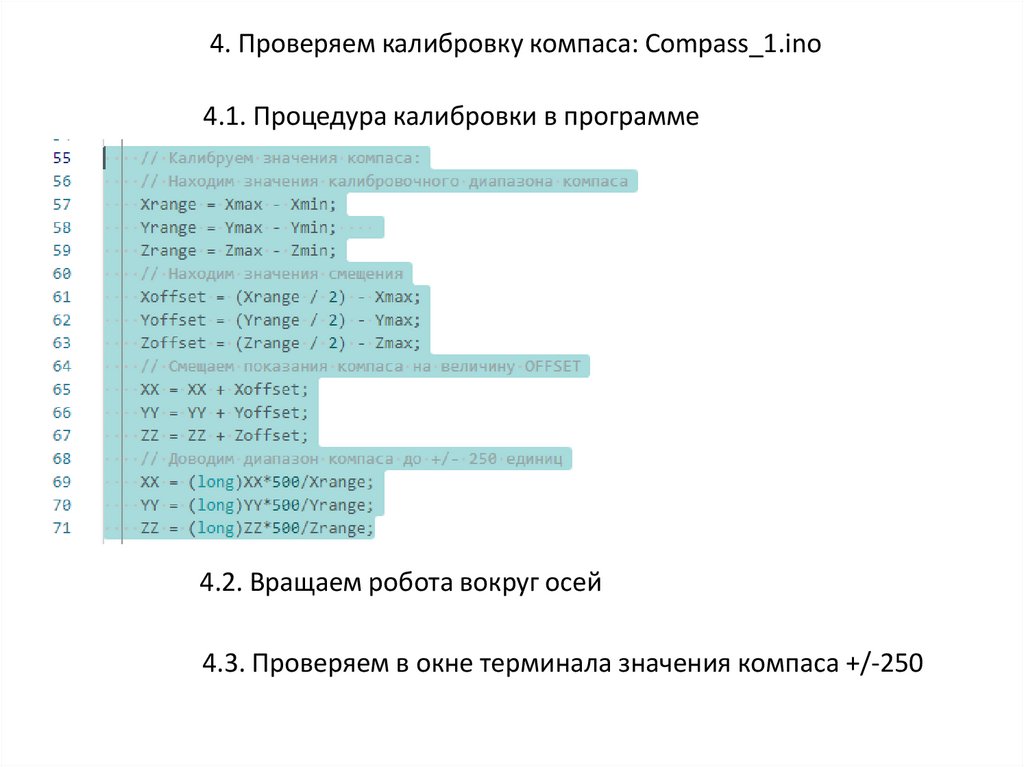
4. Проверяем калибровку компаса: Compass_1.ino4.1. Процедура калибровки в программе
4.2. Вращаем робота вокруг осей
4.3. Проверяем в окне терминала значения компаса +/-250
8.
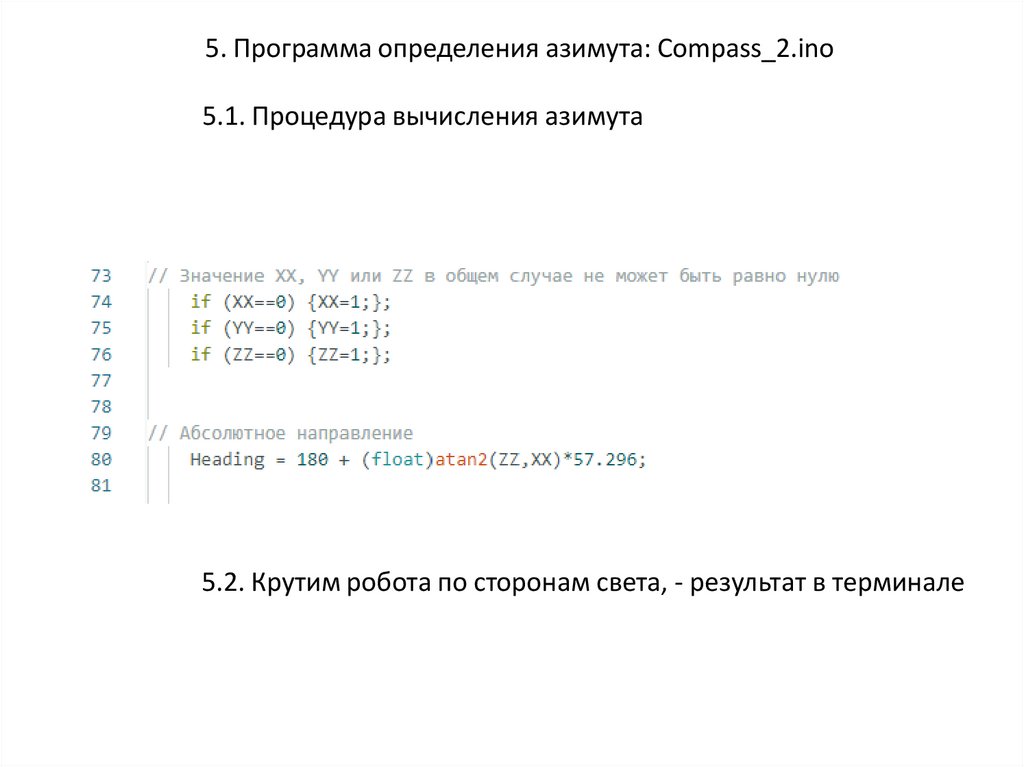
5. Программа определения азимута: Compass_2.ino5.1. Процедура вычисления азимута
5.2. Крутим робота по сторонам света, - результат в терминале