Похожие презентации:




")





Licej-Tehnicheskij-im-SP-Koroleva-IV-nauchno-prakticheskaya-konferenciya
1.
Лицей «Технический» им. С.П.Королева — IV научнопрактическая конференция
Секция «Информатика». Тема: «Спортивная робототехника. Подготовка
модели к соревнованиям»
Выполнил: Куняев Семён, Ученик 7Б. Научный руководитель: Дехтярь
О.В.
2.
СодержаниеВведение
Классификация
Актуальность, цель, задачи.
Категории соревнований:
сумо, линия, эстафета.
Этапы подготовки
Опыт автора
Проектирование, сборка,
Подготовка, этапы
тесты, финализация.
соревнования, результаты.
3.
ВведениеСпортивная робототехника объединяет инженерную мысль,
программирование и соревновательный дух. Проблема: отсутствие
унифицированных методик подготовки моделей к соревнованиям. Цель
работы — создать комплексную методику подготовки модели к
состязаниям.
4.
Научная актуальность и новизнаАктуальность
Новизна
Нужна стандартизация этапов
Систематизация этапов, алгоритм
подготовки и критериев оценки
оптимизации конструктивных и
готовности модели.
программных решений, методика
тестирования для
прогнозирования эффективности.
5.
Категория «Сумо»Раунд до 30 с: автономный поединок двух роботов. Победа —
выталкивание за границу, иммобилизация на 5 с или выход из строя
соперника. Подкатегории: микро- и мини-сумо.
Подготовка: стартовые зоны, проверка габаритов и правил, судья даёт
«Старт!». Вмешательство запрещено.
6.
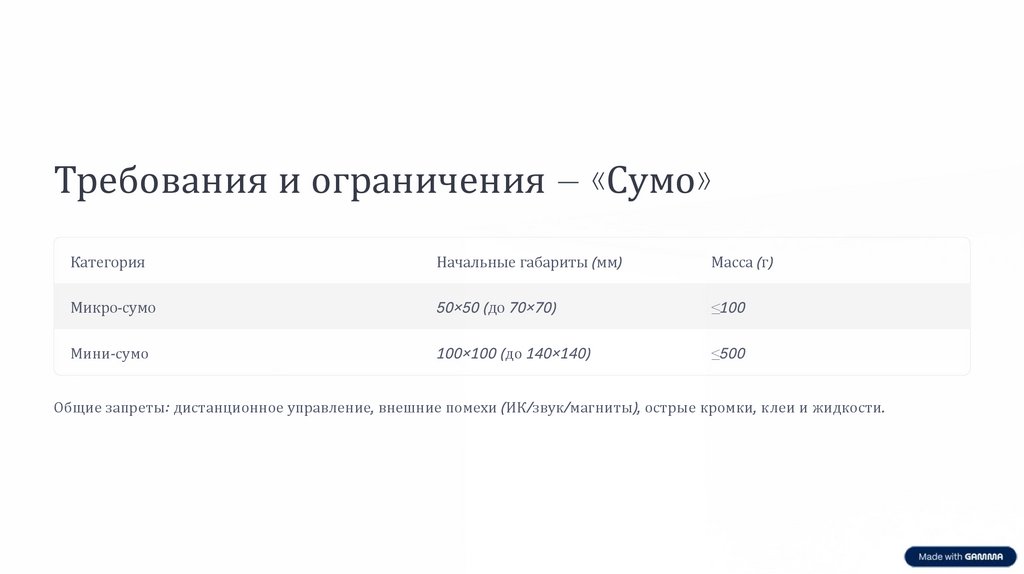
Требования и ограничения — «Сумо»Категория
Начальные габариты (мм)
Масса (г)
Микро-сумо
50×50 (до 70×70)
≤100
Мини-сумо
100×100 (до 140×140)
≤500
Общие запреты: дистанционное управление, внешние помехи (ИК/звук/магниты), острые кромки, клеи и жидкости.
7.
Категория «Следование по линии»Гонка на время: робот автономно следует по трассе (чёрная линия 18–50 мм). 2–3 попытки в раунде, суммируется лучшее
время или очки. Требования: габариты ≤250×250×250 мм, автономность, до 1–2 датчиков линии/цвета.
Очки
Штрафы и правила
Прямые — 5; перекрёстки — 10–20; инверсные — 40–50.
Съезд — остановка и перезапуск с штрафом по времени;
дистанционное управление запрещено.
8.
Категория «Робот-эстафетчик»Командная гонка: два автономных робота передают «палочку». Цель — максимум кругов за 5 минут. Передача в зоне без
выхода за её пределы; съезд или потеря — штрафы.
Подготовка
Особенности трассы
Планирование зон передачи, тесты захвата и
Наличие кочек и более широких линий
точности следования.
требует другой настройки шасси и контроля.
9.
Ключевые этапы подготовки01
Анализ регламента
Изучение габаритов, массы, ограничений и требований выбранной категории.
02
Сборка прототипа
Чертежи, выбор сенсоров/приводов, 1–2 прототипа, базовое программирование.
03
Тестирование
Симуляции трассы, ≥100 заездов, анализ видео, оптимизация механики и кода.
04
Финальная подготовка
Тесты за 1–2 дня, упаковка, репетиция, план Б на поломки.
10.
Опыт автора, результаты и выводыАвтор участвовал в категории «Следование по
линии». Подготовка: программирование на C++
(Arduino), проектирование в КОМПАС-3D, 3Dпечать модели. На соревновании —
нестабильность на поворотах, итеративная
настройка параметров привела к трём удачным
прохождениям подряд; итог — 3-е место.
Основные результаты исследования: анализ
регламентов, систематизация этапов
подготовки, предложена методика
тестирования, повысившая надёжность и
конкурентоспособность модели.
Рекомендации: внедрять
унифицированный подход для
сокращения времени подготовки и
минимизации рисков на состязаниях.