





 Программное обеспечение
Программное обеспечение Механика
МеханикаПохожие презентации:










Управление промышленными мехатронными системами
1.
Управление промышленнымимехатронными системами
Объем занятий:
18 часов лекций,
54 часов практических занятия,
экзамен.
Храмшин Вадим Рифхатович
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
2.
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МСЧеловек-оператор
Лекция 3, слайд 1
Компьютерная сеть
Цель
движения
Устройство
компьютерного
управления
Блок
приводов
Силовые
преобразователи
Сенсоры
(датчики)
Исполнительные
двигатели
Механическое
устройство
Рабочий
орган
Функциональное
движение
Возмущающее
воздвижение
Внешняя среда и
объекты работ
Рис. 3.1. Обобщенная схема машины с
компьютерным управлением движением
3.
Лекция 3, слайд 23. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Наличие
трех
обязательных
частей:
механической
(точнее
электромеханической),
электронной
и
компьютерной,
связанных
энергетическими и информационными потоками, является первичным
признаком, отличающим мехатронные системы.
Устройство компьютерного управления выполняет следующие основные
функции:
1. Управление процессом механического движения мехатронного модуля
или многомерной системы в реальном времени с обработкой сенсорной
информации.
2. Организация управления функциональными движениями МС, которая
предполагает координацию управления механическим движением МС и
сопутствующими внешними процессами. Как правило, для реализации функции
управления внешними процессами используются дискретные входы/выходы
устройства (на схемах они обычно обозначаются I/O).
3. Взаимодействие с человеком-оператором через человеко-машинный
интерфейс в режимах программирования и непосредственно в процессе
движения МС.
4. Организация обмена данными с периферийными устройствами,
сенсорами и другими устройствами системы.
4.
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МСЦель
движения
Информационноэлектрический ФП
Электрические
сигналы
Возмущающее
воздействие
Электромеханический ФП
Лекция 3, слайд 3
Механическое
движение
Электроинформационный ФП
Механикоинформационный ФП
- энергетические потоки
- информационные потоки
ФП - функциональный преобразователь
Рис. 3.2 . Информационные и энергетические потоки в мехатронной системе
5.
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МСЦель
движения
И1
Команды
Управляющие
Управляющие
Устройство управления
сигналы
усилия
Блок
компьютерного
И2
И3
приводов
управления
Механическое
устройство с
рабочим
органом
Лекция 3, слайд 4
Внешняя
среда и
объекты работ
И4
И5
Механическое
устройство с
рабочим
органом
И6
И7
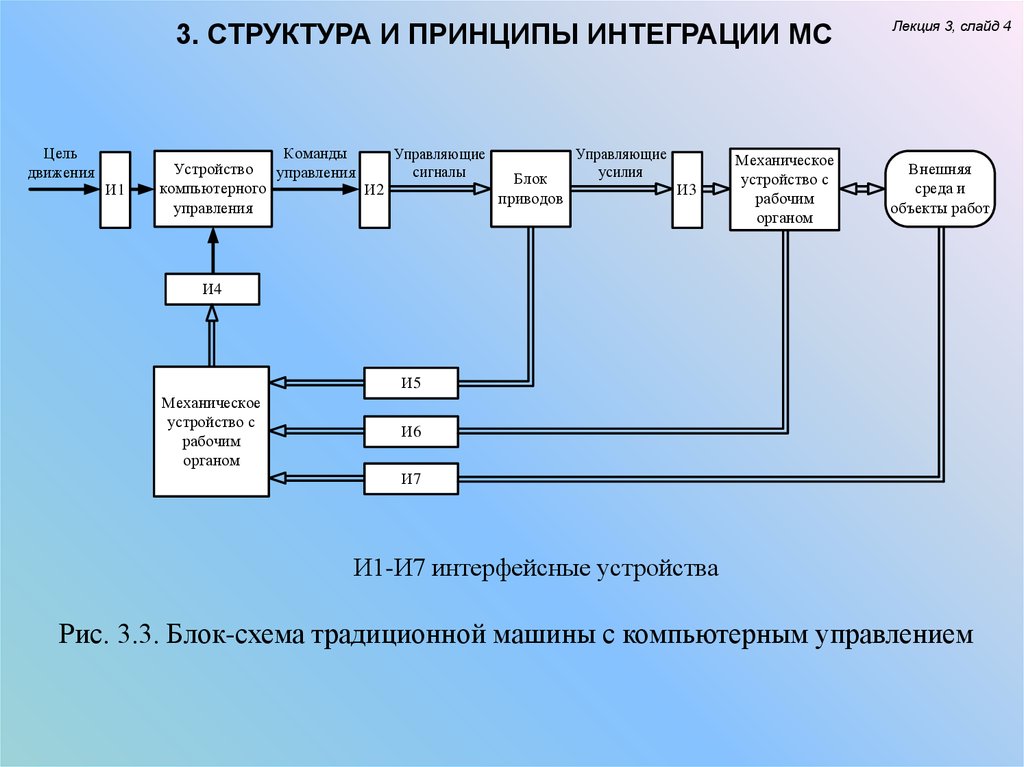
И1-И7 интерфейсные устройства
Рис. 3.3. Блок-схема традиционной машины с компьютерным управлением
6.
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МСЛекция 3, слайд 5
Примеры межблоковых интерфейсов, которые наиболее часто
встречаются в машинах с компьютерным управлением
Интерфейс И1 представляет собой комплекс сетевых аппаратнопрограммных средств для сопряжения устройства компьютерного управления с
компьютерной сетью, либо это интерфейс человек - машина, если цель
управления мехатронной системе задается непосредственно человекомоператором.
Современные человеко-машинные интерфейсы выполняются в виде
пультов
и
рукояток
дистанционного
управления
(например,
для
программирования промышленных роботов методом обучения), периферийных
устройств компьютеров (клавиатура, монитор, джойстик), сенсорных дисплеев
устройств отображения информации в системах виртуальной реальности
(перчатки, шлемы со встроенными окулярами и др.).
Интерфейс И2 обычно состоит из цифро-аналогового преобразователя и
усилительно-преобразующего устройства и служит для формирования
управляющих электрических напряжений для исполнительных приводов.
7.
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МСЛекция 3, слайд 6
Интерфейс И3 - представляет собой, как правило, механические передачи,
связывающие исполнительные двигатели со звеньями механического
устройства. Конструктивно такие трансмиссии обычно включают редукторы,
муфты, гибкие связи, тормоза и т.п.
Интерфейс И4 на входе устройства компьютерного управления в случае
применения в МС сенсоров с аналоговым выходным сигналом строится на
основе аналого-цифровых преобразователей.
Интерфейсы сенсоров И5, И6 и И7 в зависимости от физического
характера входных переменных состояния системы можно разделить на
электрические и механические. К механическим относятся присоединительные
устройства для датчиков обратной связи приводов (фотоимпульсных, кодовых,
тахогенераторов, потенциометров, резольверов), силомоментных и тактильных
датчиков, а также других средств очувствления и информации о движении
двигателей, звеньев механического устройства и внешних объектов.
Преобразование и передача сигналов о переменных состояния системы, которые
имеют электрическую природу (например, напряжения и токи в силовых
преобразователях) осуществляется электрическими интерфейсами. В их состав
помимо усилительно-преобразующих плат входят также соединительные кабели
и коммутационная аппаратура.
8.
Лекция 3, слайд 73. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Таблица 3.1
Потенциально возможные точки аппаратной интеграции и структуры
соответствующих мехатронных модулей
Мехатронный
модуль
Исходные элементы
Базовый элемент
Дополняющий
элемент
Исключаемый
интерфейс
Интеллектуальный
силовой
преобразователь
Силовой
преобразователь
Микропроцессор
И2
Приводной модуль
Исполнительный
двигатель
Механическое
устройство
ИЗ
Интеллектуальный
сенсор
Сенсор
Микропроцессор
И4
Сенсор
И3, И5
Сенсор
И6
Мехатронный модуль Приводной модуль
движения
Очувствленный
Рабочий орган
рабочий орган