

























 Промышленность
ПромышленностьПохожие презентации:










Основы конструкции самолета
1.
Экраноплан – летательный аппарат, летающий вблизиповерхности воды и ровных участков земли с использованием эффекта близости земли (экранного эффекта)
Главное достоинство – уменьшение потребной мощности
двигателя (по сравнению с самолетом).
Недостатки:
– большая взлетная
скорость;
– малая высота полета
(проблема преодоления препятствий).
2.
Экранолет – полет вкрейсерском режиме
осуществляется вблизи
экрана, при необходимости способен подниматься на относительно
большую высоту
3.
Вертолет – это ЛА тяжелее воздуха совершающий полет засчет тяги, создаваемой одним или несколькими несущими
винтами (НВ) по аэродинамическому принципу.
4.
5.
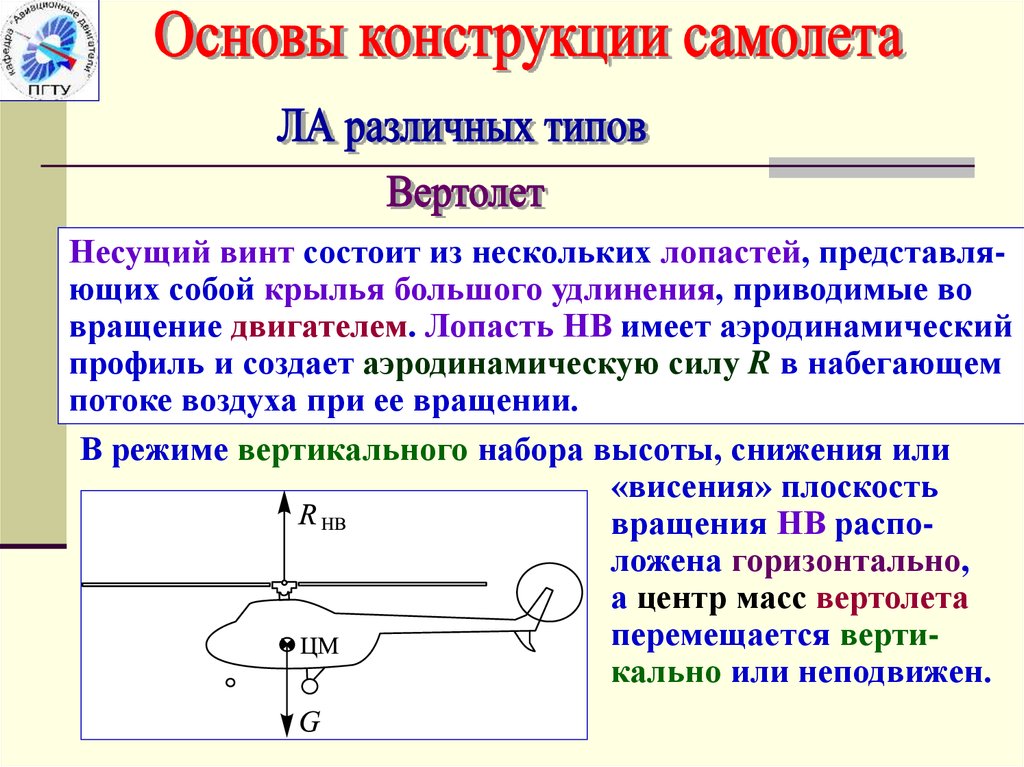
Несущий винт состоит из нескольких лопастей, представляющих собой крылья большого удлинения, приводимые вовращение двигателем. Лопасть НВ имеет аэродинамический
профиль и создает аэродинамическую силу R в набегающем
потоке воздуха при ее вращении.
В режиме вертикального набора высоты, снижения или
«висения» плоскость
вращения НВ расположена горизонтально,
а центр масс вертолета
перемещается вертикально или неподвижен.
6.
Создание горизонтальной составляющей тягиС помощью автомата перекоса производится наклон
плоскости НВ в сторону полета, что вызывает появление неуравновешенного момента Мz=RНВ ×с. Под действием этого момента вертолет вращается вокруг центра
масс до тех пор пока Мz не станет равным нулю.
7.
Создание горизонтальной составляющей тягиТак как Y=G, P=X, моменты Р·b=Y·a, вертолет совершает
равномерный полет в горизонтальной плоскости.
Для обеспечения наклона плоскости НВ автомат перекоса
производит циклическое увеличение углов установки
лопастей при прохождении ими заданной точки с последующим возвращением α к его исходному значению.
8.
Режим «авторотации» реализуется при отказе двигателявертолета выводом НВ из зацепления с редуктором. В этом
случае НВ, вращаясь в набегающем потоке воздуха, создает
подъемную силу Y. «Авторотация» возможна только при
наличии поступательной скорости, и позволяет вертолету
«планировать» со снижением.
9.
10.
Автожир (франц. autogyre от греч. autos – сам и gyros – круг,вращение) это летательный аппарат тяжелее воздуха, совершающий полет за счет тяги, создаваемой несущим винтом,
вращающимся свободно (без привода от двигателя) под
действием набегающего потока воздуха
Режим установившегося самовращения «авторотации»
является основным.
На режиме самовращения реактивный момент на
фюзеляже отсутствует, так как мощность, необходимая
для вращения НВ, создается потоком воздуха
11.
Поступательное движение необходимое для созданиянабегающего на НВ потока воздуха и преодоления
силы аэродинамического сопротивления, обеспечивается тянущим или толкающим воздушным винтом
С тянущим винтом
С толкающим винтом
12.
СВВП объединяет достоинства самолета и вертолета иимеет нулевую скорость отрыва и посадки
Недостатки:
- высокая относительная масса силовой установки
mСУ mСУ / m ЛА
- низкая относительная масса полезной нагрузки
mПН mПН m ЛА
- низкая экономичность;
- малый ресурс двигателей.
13.
СВВП с подъемными двигателямиСВВП с подъемно-маршевыми двигателями
СВВП с подъемными и подъемно-маршевыми двигателями
14.
Для уменьшения недостатков СВВП используют самолетыс коротким взлетом и посадкой (СКВП)
Для реализации короткого взлета и посадки используют:
R / G ЛА
15.
Реализация короткого взлета у СВВП позволяет:Vкр
В момент отрыва СВВП от поверхности вектор тяги отклоняется
вниз на нужный угол, а после
набора скорости принимает
горизонтальное направление.
Возможен взлет с трамплина.
Непосредственное управление
подъемной силой (НУПС)
16.
XFМ
M 2,5
17.
18.
МВКЛА с гиперзвуковым самолетом -разгонщиком19.
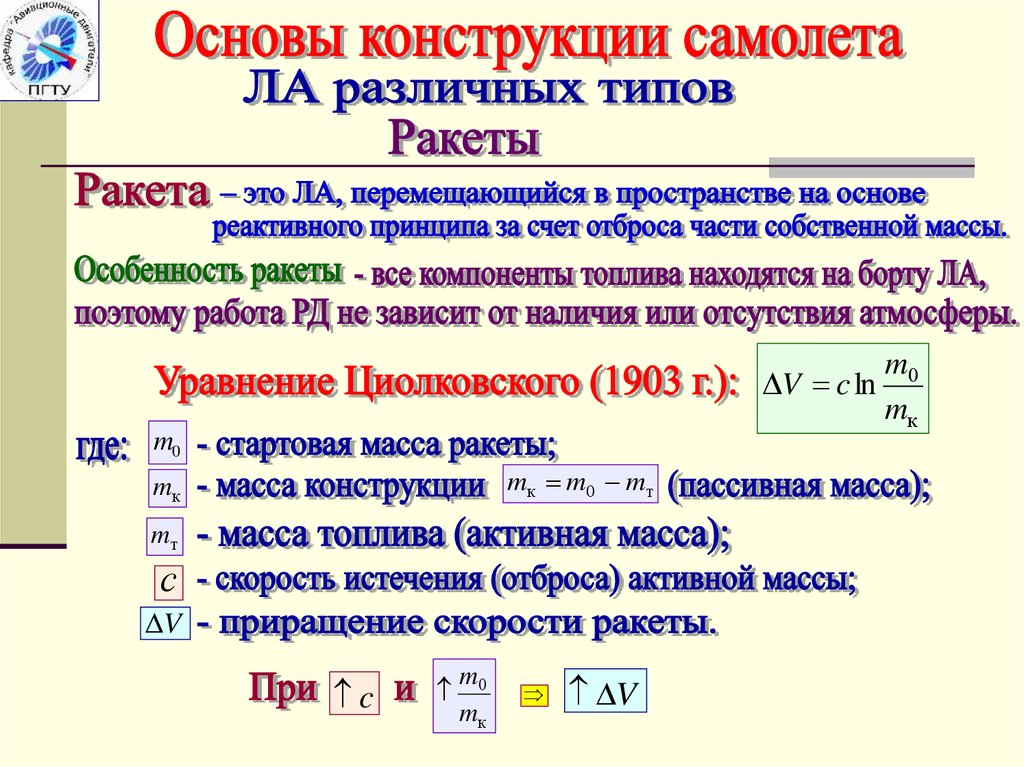
m0V c ln
mк
m0
mк m0 mт
mк
mт
с
V
c
m0
mк
V
20.
1.Аэродинамические схемы:
а – «бесхвостка»;
б – «утка»;
в – нормальная схема;
г – крылатая.
2.
3.
21.
1. Геофизические – для исследования верхних слоеватмосферы и передачи полученных данных на землю;
2. Противоградовые – для доставки и распыления
специальных реагентов внутри потенциально градовых
облаков, с целью их конденсации и выпадения в виде;
дождя;
3. Сигнальные;
4. Космические – для вывода космических летательных
аппаратов (КЛА) и боевых блоков в космос и перемещения
их в космическом пространстве.
22.
Головная часть (ГЧ):Система управления (СУ):
Органы управления (ОУ):
23.
24.
Ракетоносители (РН) являются наиболее мощнымиракетами предназначенными для вывода в космическое
пространство космических летательных аппаратов (КЛА)
и боевых блоков межконтинентальных баллистических
ракет (МБР)
mo
mк mк mo ( m0 / mк )
V c ln
V c ln
m0
mк
m0
mк
25.
КЛА одноразового использования относительно простытехнически, но так как полезная нагрузка (ПН) составляет
40…45% от стоимости всей ракеты и обратно не возвращается, то стоимость каждого пуска очень высока.
Для снижения стоимости каждого пуска конструкторы
стремятся создать КЛА многоразового использования.
Многоразовые воздушно-космические ЛА (МВКЛА) делают в
виде воздушно-космического ЛА, который выводится на орбиту
РН или выходит самостоятельно после предварительного
разгона дозвуковым или гиперзвуковым самолетом-носителем,
а затем, выполнив задачу в космосе, МВКЛА снижает скорость
до V<Vк.1 (первая космическая скорость), и сходит с орбиты
Земли, далее тормозится в атмосфере, и совершает посадку
«по- самолетному».
26.
Первыми многоразовымикосмическими системами
стали«Спейс шатл» – космический челнок (США)
и комплекс «Энергия – Буран»
(СССР)
27.
Использование крылатого дозвукового или гиперзвуковогоЛА в качестве разгонной ступени МВКЛА, может быть
серьезной альтернативой многоразовым космическим
системам первого поколения
Основная проблема – создание комбинированной силовой
установки для полета как в атмосфере, так и в космосе с
минимальным расходом топлива
28.
G FгравM З m km
2
2
r
r
k M 3 398603 км 3 /с 2 сonst
- γ 6,67 10 11 м 3 /кг с 3
M3
m
R
X
Yупр
Fцб
29.
Движение КЛА в гравитационном поле Земли происходитв одной плоскости, проходящей через центр масс Земли.
При плоском движении КЛА начальные условия движения
на ПУТ определяются значениями параметров в точке
выключения двигателя в конце АУТ – точке к
Параметры в точке к:
rк RЗ Н к ; - расстояние от точки к
до центра масс Земли
Vк ; - скорость в точке к
к ; - угол бросания в точке к
30.
В зависимости от значений перечисленных параметровв точке к траектория КЛА может быть в форме круга 1,
эллипса 2, параболы 3, гиперболы 4.
к 0; Vк Vк .1 rк - эллиптическая
где: Vк .1 rк - первая космическая скорость
Частные случаи эллиптической орбиты:
к 0; Vк Vк .1 rк - круговая
к 0; Vк Vк .1 - баллистическая
к 0;
Vк Vк .2 - парабаллическая
к 0;
Vк Vк .2 - гипербаллическая
где:
Vк .2 - вторая космическая скорость
31.
Fграв Fцбkm mV 2
2
r
r
k
k
V1
r
RЗ H
R З 6371 км
H
V1
H 300 км
V1 7,37 км/с
Н 100 км
V1 7,85 км/с
32.
Fграв Fцбwгео w З
km mVгео
2
r
r
2
Vгео
k
r
k
R З H гео
Vгео
2
2
V
R З Н гео
гео
R З Н гео Т
T
T 24 3600 86400с.
Vгео
2
R З Н гео
T
k
R З Н гео
2
R З Н гео
T
k
R З Н гео
H гео 35760 км
Vгео 3,076 км/с
33.
реализуется при: к 0; Vк Vк .1Задавая значение LПУТ, равное геодезической линии к' – с, можно точно рассчитать потребные значения Vк, Θк, rк,
обеспечивающие достижение заданной
дальности полета LПУТ, а так же рассчитать время полета на ПУТ – ТПУТ.
Обычно используется для доставки термоядерных зарядов к цели баллистическими
ракетами военного назначения.