




























 имеет двойственную задачу.")


















 Математика
МатематикаПохожие презентации:










Линейное программирование
1. Оглавление
Линейное программированиеСимплекс-метод
Основная теорема линейного программирования
Графический метод решения
Задача на максимум
Геометрический метод решения задач линейного
программирования
Задача с бесконечным множеством оптимальных решений
Усложнённые постановки транспортной задачи
Многоэтапная задача
Двойственные задачи
Закрытая транспортная задача
Метод потенциалов
2. Линейное программирование
Линейное программирование —математическая дисциплина, посвящённая теории
и методам решения экстремальных задач на
множествах n-мерного векторного пространства,
задаваемых системами линейных уравнений и
неравенств.
Линейное программирование является частным
случаем выпуклого программирования, которое в
свою очередь является частным случаем
математического программирования.
Одновременно оно — основа нескольких методов
решения задач целочисленного и нелинейного
программирования.
3.
Задачи линейного программирования можно решитьаналитическим путем и графическим методом.
В геометрии есть такое понятие, как "симплекс". С
учетом этого понятия аналитический метод решения
задач линейного программирования называется
симплекс-методом.
4. Симплекс-метод
Идея метода симплекс-таблиц заключается вцеленаправленном переборе вершин симплекса. Для
начало перебора необходимо выбрать опорную
вершину с которой начнется перебор.
Симплексный метод решения задачи линейного
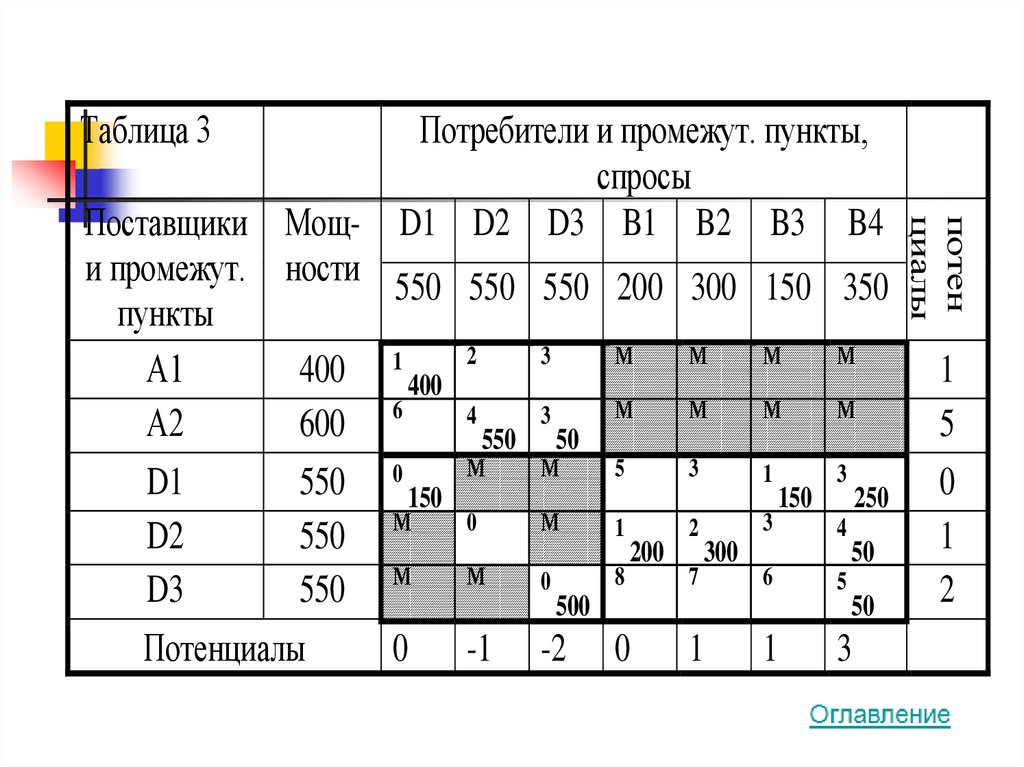
программирования основан на переходе от одного
опорного плана к другому, (перебирая симплекс
вершины) при котором значение целевой функции
возрастает (убывает). Указанный переход возможен,
если известен какой-нибудь исходный опорный план.
Для составления такого плана необходимо
произвести векторный анализ, на основе которого
определить опорную вершину, с которой начнется
перебор.
5. Задача линейного программирования записывается следующим образом:
6. Аналитический метод решения задач ЛП:
1. Найти вершины ОДР.2. Определить значения целевой функции в
вершинах.
3. Вершина, в которой ЦФ приобретает
оптимальное (максимальное или
минимальное) значение, является
оптимальной вершиной.
4. Координаты этой вершины и являются
искомыми оптимальными значениями
переменных.
7. Основная теорема линейного программирования
Целевая функция задачи линейногопрограммирования достигает своего
экстремума (минимума или максимума) в
вершине допустимой области. Если
целевая функция достигает
экстремального значения более, чем на
одной вершине, то она достигает того же
значения в любой точке, являющейся
выпуклой комбинацией этих вершин.
8.
В том случае, когда требуется найтиминимум функции
можно перейти к нахождению максимума
функции
поскольку
9. Графический метод решения
Нормы расходасырья (кг)
Вид сырья
Общее
количество
на одно изделие
сырья (кг)
А
В
I
12
4
300
II
4
4
120
III
3
12
252
Прибыль от реализации
одного изделия (руб.)
30
40
Составить такой план их выпуска, при котором прибыль
предприятия от реализации всех изделий является
максимальной
10.
Будет изготовлено:x1 единиц изделий вида А
x2 единиц изделий вида В
Прибыль от их реализации составит:
→ max
11.
12.
Координаты точки В и определяют план выпускаизделий А и В, при котором прибыль от их
реализации является максимальной.
Найдем координаты точки В как точки пересечения
прямых II и III. Следовательно, ее координаты
удовлетворяют уравнениям этих прямых
Решив эту систему уравнений, получим:
Оптимальный план
x* = (12, 18)
f(x*)= 1080
13.
Типоборудования
Затраты времени
Общий фонд
(станко-часы)
на обработку
рабочего
времени
оборудования
одного изделия
каждого вида
(часы)
Фрезерное
А
2
В
4
С
5
120
Токарное
Сварочное
1
7
8
4
6
5
280
240
Шлифовальное
4
6
7
360
Прибыль (руб.)
10
14
12
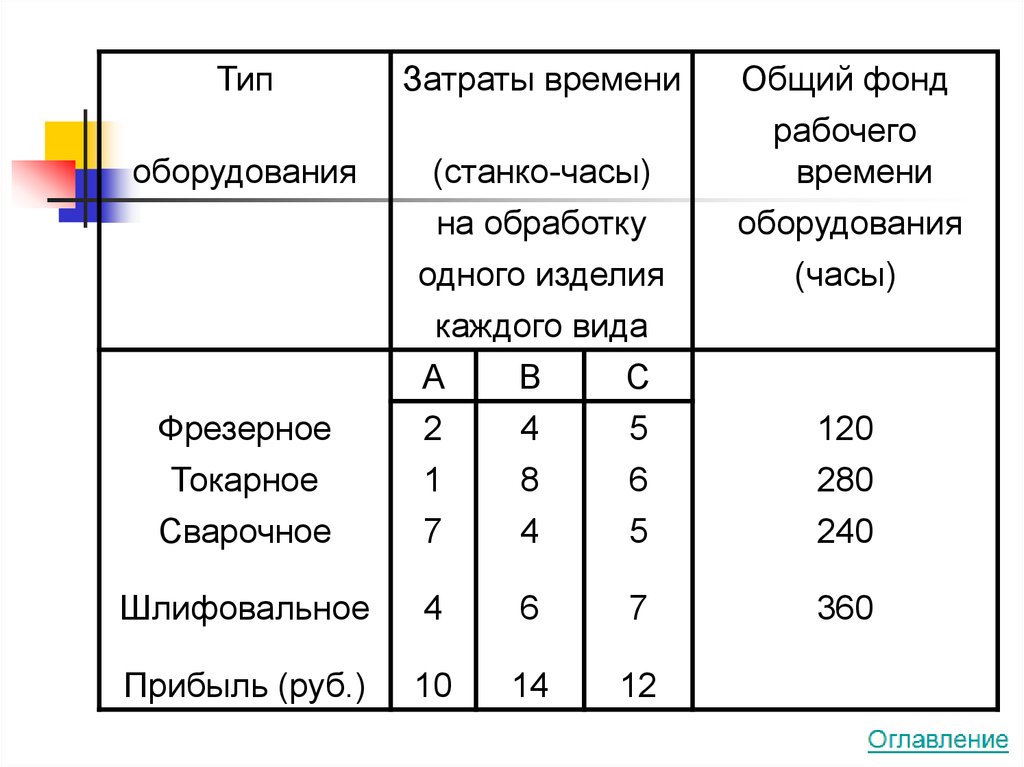
14. Задача на максимум
Сколько изделий и какого вида следует изготовить предприятию,чтобы прибыль от их реализации была максимальной?
Будет изготовлено:
x1 единиц изделий вида А
x2 единиц изделий вида В
x3 единиц изделий вида С
Прибыль от их реализации составит:
→ max
15.
Решим задачу с помощью симплекс-методаШаг 0
Базис
БП
x1
x2
x3
x4
x5
x6
x7
x4
120
2
4
5
1
0
0
0
x5
280
1
8
6
0
1
0
0
x6
240
7
4
5
0
0
1
0
x7
360
4
6
7
0
0
0
1
ИС
0
-10
-14
-12
0
0
0
0
Базис
БП
x1
x2
x3
x4
x5
x6
x7
x2
30
1/2
1
5/4
1/4
0
0
0
x5
40
-3
0
-4
-2
1
0
0
x6
120
5
0
0
-1
0
1
0
x7
180
1
0
-1/2
-3/2
0
0
1
ИС
420
-3
0
11/2
7/2
0
0
0
Шаг 1
16.
Шаг 2Базис
БП
x1
x2
x3
x4
x5
x6
x7
x2
18
0
1
5/4
7/20
0
-1/10
0
x5
112
0
0
-4
-13/5
1
3/5
0
x1
24
1
0
0
-1/5
0
1/5
0
x7
156
0
0
-1/2
-13/10
0
-1/5
1
ИС
492
0
0
11/2
29/10
0
3/5
0
Получен оптимальный план
x* = (24, 18, 0)
f(x*)= 492
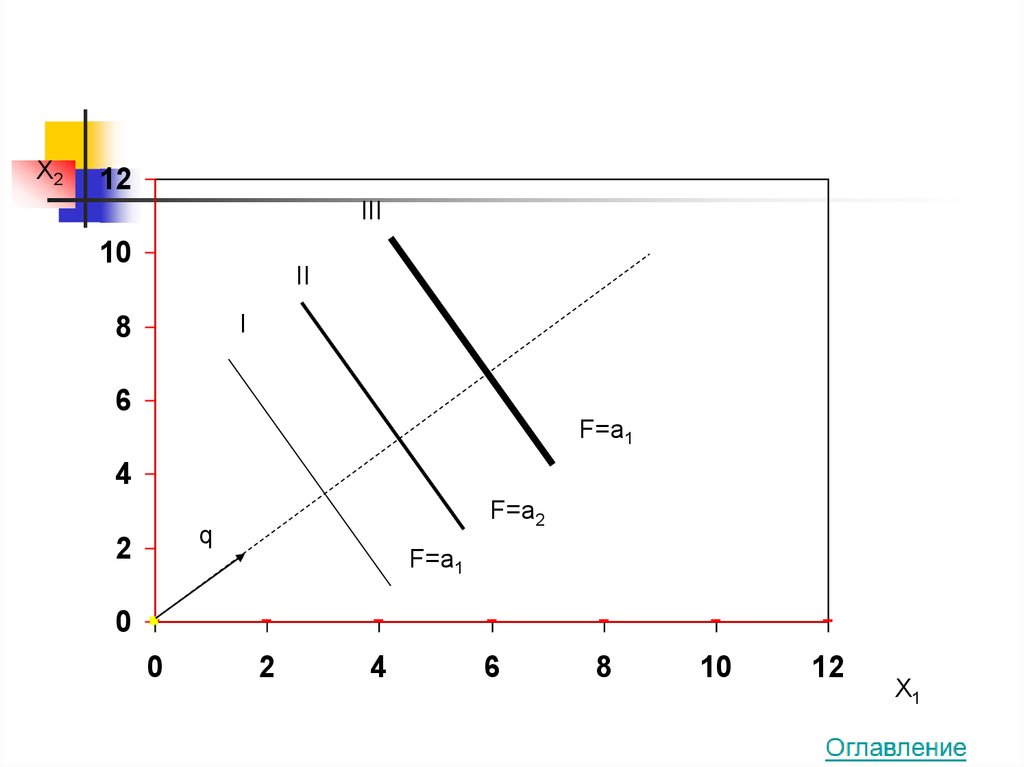
17. Геометрический метод решения задач линейного программирования
18. Основные понятия
Линия уровня – линия, вдоль которойцелевая функция принимает одно и то же
фиксированное значение (a).
F = c1x1 + c2x2 = a
19.
X212
III
10
II
I
8
6
F=a1
4
F=a2
q
2
F=a1
0
0
2
4
6
8
10
12
X1
20. Геометрический смысл
x2x1 = 0
(0, x2, 0, x4)
(x1, x2, 0, 0)
c1x1 + c2x2 → max
a11x1 + a12x2 ≤ b1
a12x1 + a22x2 ≤ b2
x1 ≥ 0
x2 ≥ 0 {c1; c2}
(0, 0, x3, x4)
x4 = b2 – a21x1 – a22x2 = 0
x2 = 0
(x1, 0, x3, 0)
x1
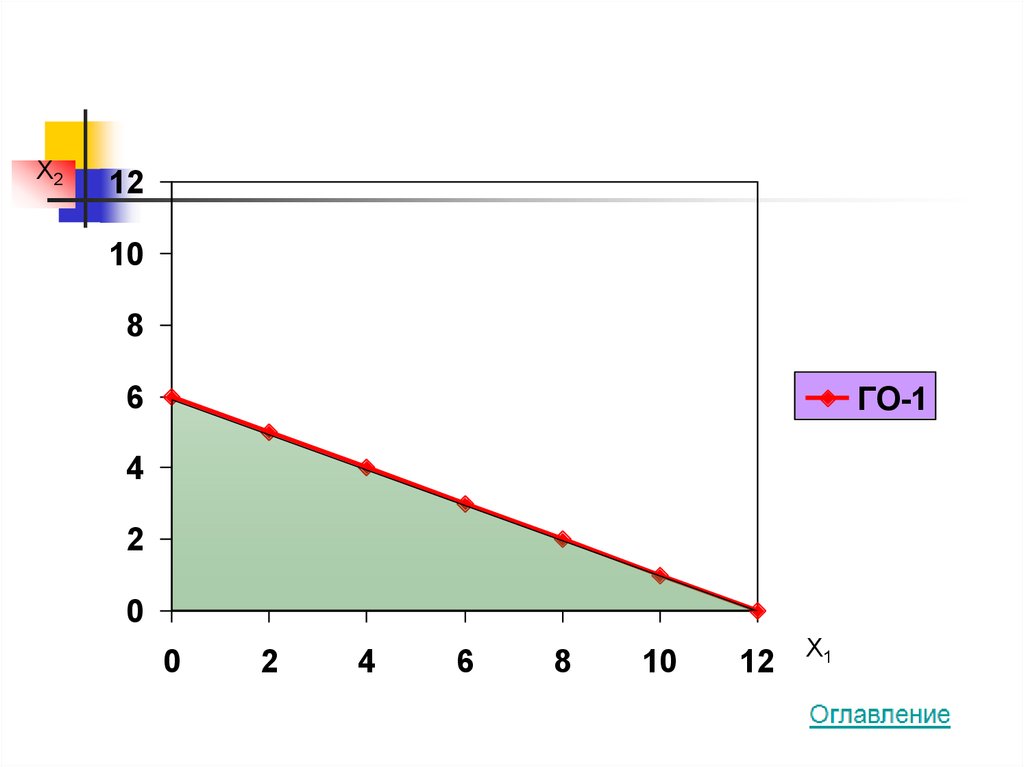
21. Условие задачи
Продукция
Цена
(млн.
руб.
/шт.)
ГО-1
(час/ед.)
1
4
100
50
2
2
200
50
Общие
ГО-2
(час/ед.
)
Гос.
Заказ
(ед./
мес.)
1200 400 4
(час/ (час/
мес.) мес.)
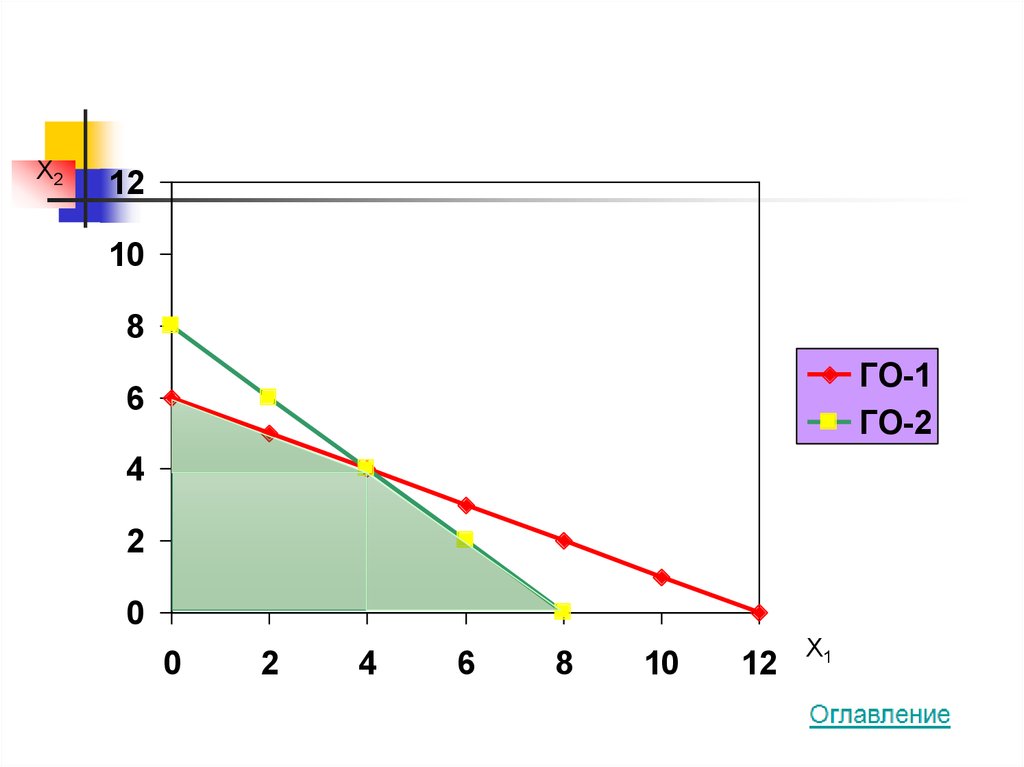
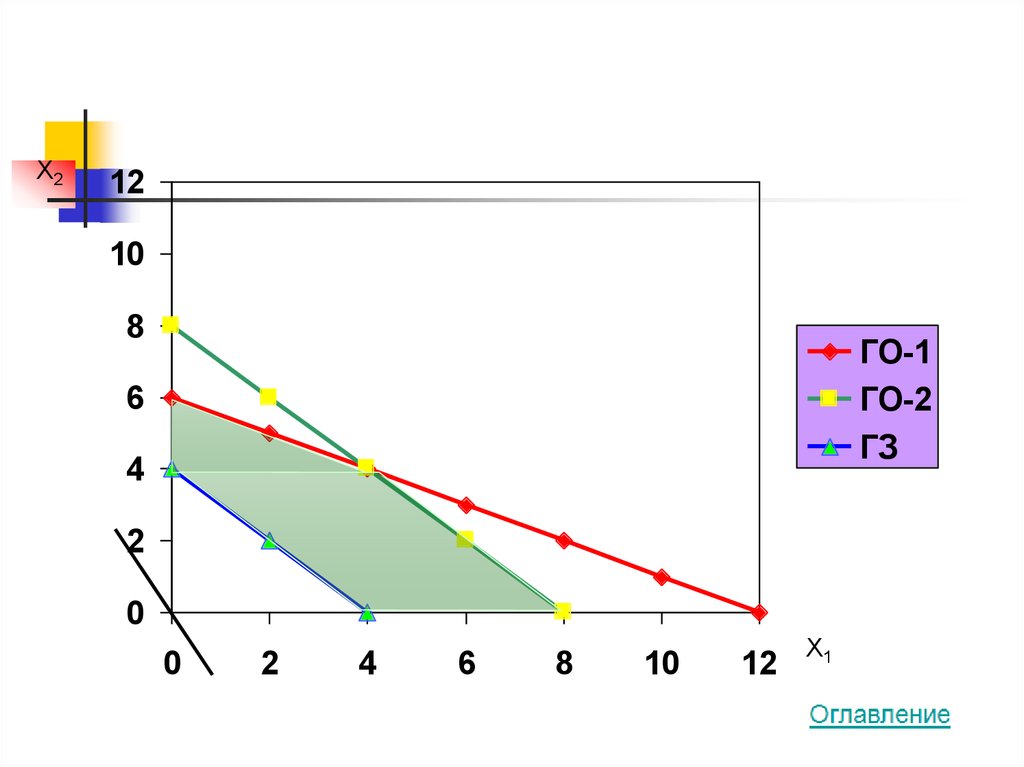
4x1 + 2x2 MAX
100x1 + 200x2 ≤
1200
50x1 + 50x2 ≤ 400
x1 + x2 ≥ 4
x1 ≥ 0
x2 ≥ 0
22.
X212
10
8
6
4
2
0
0
2
4
6
8
10
12
X1
23.
X212
10
8
ГО-1
6
4
2
0
0
2
4
6
8
10
12
X1
24.
X212
10
8
ГО-1
ГО-2
6
4
2
0
0
2
4
6
8
10
12
X1
25.
X212
10
8
ГО-1
ГО-2
ГЗ
6
4
2
0
0
2
4
6
8
10
12
X1
26.
X212
10
8
ГО-1
ГО-2
ГЗ
6
4
2
0
0
2
4
6
8
10
12
X1
27. Ответ и проверка
4x1 + 2x2 MAX100x1 + 200x2 ≤ 1200
50x1 + 50x2 ≤ 400
x1 + x2 ≥ 4
x1 ≥ 0
x2 ≥ 0
4*8 + 2*0 MAX
100*8 + 200*0 ≤ 1200
50*8 + 50*0 ≤ 400
8+0≥4
8≥0
0≥0
28. Задача с бесконечным множеством оптимальных решений
X225
20
15
ГО-1
ГО-2
A (2,5 ; 7,5)
10
5
B (4 ; 0)
0
0
2
4
6
8
10
X1
29. Координаты точек оптимальных решений
α(2,5 ; 7,5) + (1 - α)(4 ; 0) ==(2,5α ; 7,5α) + (4 - 4α ; 0) =
=(4 – 1,5α ; 7,5α)
(4 ; 0), (3 ; 5), (2,5 ; 7,5)
0≤α≤1
30. Задача не имеющая оптимального решения
X225
20
15
ГО-1
ГО-2
10
5
0
0
2
4
6
8
10
X1
31. Задача не имеющая оптимального решения
X225
20
ГО-1
ГО-2
ГО-3
15
10
5
0
0
2
4
6
8
10
X1
32. Усложнённые постановки транспортной задачи
33. Ограничения пропускной способности:
В стандартной постановке транспортной задачипредполагается, что из любого пункта по любой
дороге может быть перевезено любое количество
груза. Однако в реальных условиях и задачах так
бывает далеко не всегда.
При использовании нескольких видов транспорта
может оказаться, что количество транспортных
средств определённого вида, используемого на
данном направлении, ограничено и т.д.
Наиболее простой, но самый эффективный способ
учёта ограничений по пропускной способности
заключается в следующем:
34.
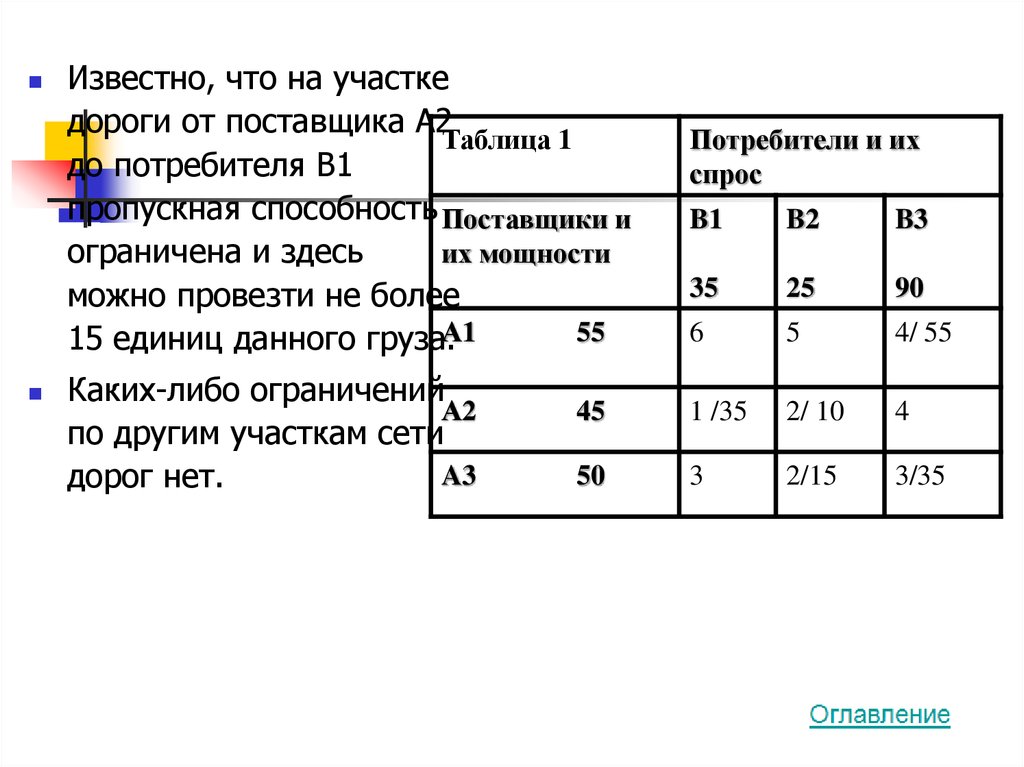
Известно, что на участкедороги от поставщика А2
Таблица 1
до потребителя В1
пропускная способность Поставщики и
их мощности
ограничена и здесь
можно провезти не более
55
15 единиц данного груза.А1
Каких-либо ограничений
А2
по другим участкам сети
A3
дорог нет.
Потребители и их
спрос
B1
B2
B3
35
25
90
6
5
4/ 55
45
1 /35
2/ 10
4
50
3
2/15
3/35
35.
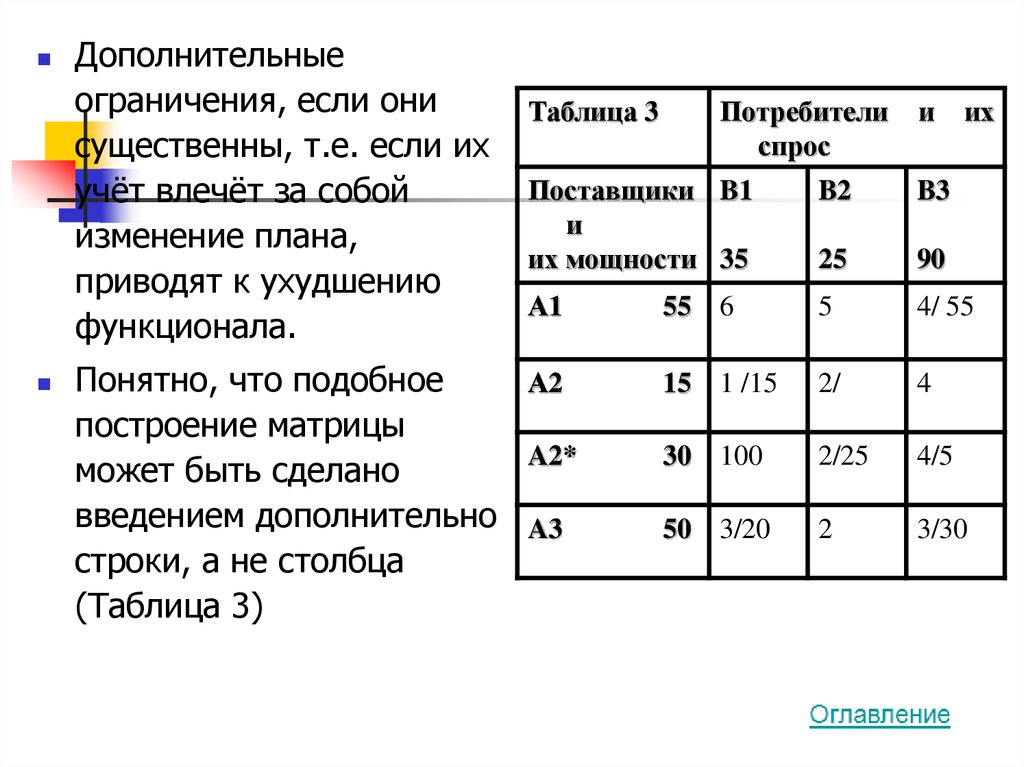
Дополнительныеограничения, если они
существенны, т.е. если их
учёт влечёт за собой
изменение плана,
приводят к ухудшению
функционала.
Таблица 3
Потребители
спрос
и
их
Поставщики B1
и
их мощности 35
B2
B3
25
90
А1
55 6
5
4/ 55
15 1 /15
2/
4
30 100
2/25
4/5
50 3/20
2
3/30
Понятно, что подобное
А2
построение матрицы
A2*
может быть сделано
введением дополнительно A3
строки, а не столбца
(Таблица 3)
36.
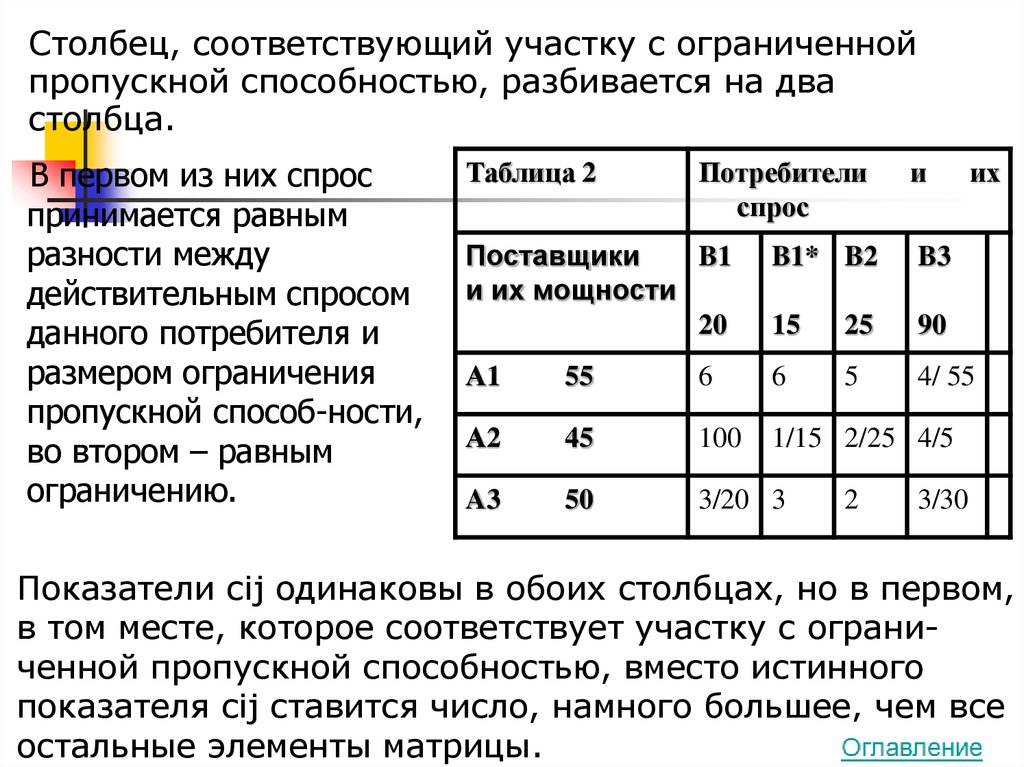
Столбец, соответствующий участку с ограниченнойпропускной способностью, разбивается на два
столбца.
В первом из них спрос
принимается равным
разности между
действительным спросом
данного потребителя и
размером ограничения
пропускной способ-ности,
во втором – равным
ограничению.
Таблица 2
Потребители
спрос
и
их
B1
Поставщики
и их мощности
20
B1* B2
B3
15
25
90
А1
55
6
6
5
4/ 55
А2
45
100
1/15 2/25 4/5
A3
50
3/20 3
2
3/30
Показатели сij одинаковы в обоих столбцах, но в первом,
в том месте, которое соответствует участку с ограниченной пропускной способностью, вместо истинного
показателя сij ставится число, намного большее, чем все
остальные элементы матрицы.
37. Многоэтапная задача
ПоставщикиСклады
Потребители
В1
D1
В2
A1
D2
В3
A2
D3
В4
38. Если суммарная ёмкость складов равна суммарной мощности и суммарному спросу потребителей ёмкость каждого склада будет
d a bk
i
j
Если суммарная ёмкость складов равна суммарной
мощности и суммарному спросу потребителей
ёмкость каждого склада будет использоваться
полностью и схема перевозок груза со складов к
потребителям не зависит от схемы перевозок груза
от поставщиков на склады и со складов
потребителям.
39. Способ Ордена-Маша
Таблица 1Поставщики
и промежут.
пункты
А1
А2
D1
D2
D3
Мощности
400
600
550
550
550
Потребители и промежут. пункты,
спросы
D1 D2 D3 B1 B2 B3 B4
550 550 550 200 300 150 350
1
2
3
М
М
М
М
6
4
3
М
М
М
М
0
М
М
5
3
1
3
М
0
М
1
2
3
4
М
М
0
8
7
6
5
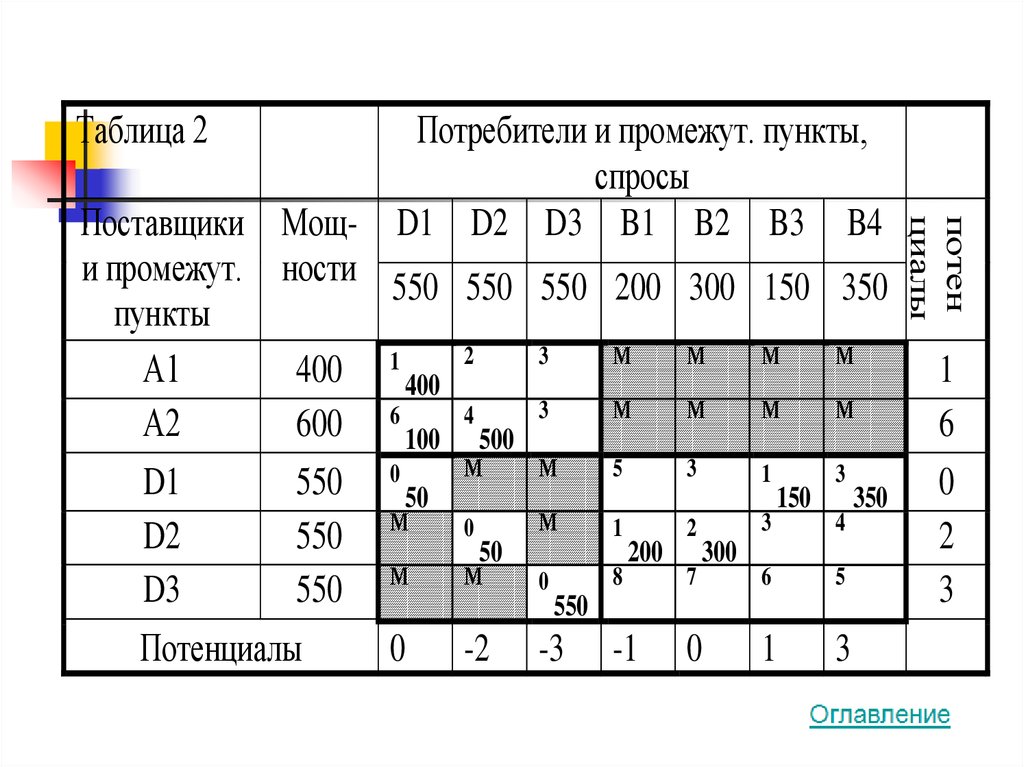
40.
Таблица 2потен
циалы
Потребители и промежут. пункты,
спросы
Поставщики Мощ- D1 D2 D3 B1 B2 B3 B4
и промежут. ности 550 550 550 200 300 150 350
пункты
3
М
М
М
М
А1
400 1 400 2
М
М
М
М
А2
600 6 100 4 500 3
3
1
3
D1
550 0 50 М М 5
150 350
4
D2
550 М 0 50 М 1 200 2 300 3
7
6
5
D3
550 М М 0 550 8
Потенциалы
0 -2 -3 -1 0 1 3
1
6
0
2
3
41.
Таблица 3потен
циалы
Потребители и промежут. пункты,
спросы
Поставщики Мощ- D1 D2 D3 B1 B2 B3 B4
и промежут. ности 550 550 550 200 300 150 350
пункты
3
М
М
М
М
А1
400 1 400 2
М
М
М
М
4
3
А2
600 6
550 50
3
1
3
D1
550 0 150 М М 5
150 250
М
3
1
2
4
D2
550 М 0
200 300
50
7
6
5
D3
550 М М 0 500 8
50
Потенциалы
0 -1 -2 0 1 1 3
1
5
0
1
2
42. Двойственные задачи
43. Любая задача линейного программирования (даже не имеющая решений) имеет двойственную задачу.
Прежде чем строить двойственнуюзадачу в задаче на max все
неравенства приводят к знаку ,
а в задаче на min – к .
Т. о. в задаче на max знаки могут
быть либо « », либо «=».
44. Правило построения двойственной задачи:
Если исходная задача на max, то двойственная на min и наоборот.В двойственной задаче столько переменных, сколько ограничений в исходной,
прием эти переменные соответствуют ограничениям и наоборот.
Коэффициентами целевой функции двойственной задачи являются правые
части ограничений исходной задачи.
Матица коэффициентов ограничений двойственной задачи получается
транспонированием матрицы коэффициентов ограничений исходной задачи.
Правыми частями ограничений двойственной задачи являются коэффициенты
целевой функции исходной.
Ограничениям неравенствам исходной задачи соответствуют неотрицательные
переменные двойственной задачи, а ограничениям равенствам – переменные
любого знака и наоборот.
f ( x) 3x1 12 x2 5x3 x4 max
x1 2 x2 x3 x4 5
5 x1 4 x2 x3 2 x4 7
x 0
1
x2 0
x3 0
x4 0
g ( y) 5 y1 7 y2 min
y1 0
y2 0
y1 5y2 12
2 y1 4 y2 3
y1 y2
5
y1 2y2 1
45.
f(x) g(y) - основноенеравенство двойственности
Теорема1: Если исходная задача
имеет оптимальный план x*, то
двойственная задача также имеет
оптимальный план y*, причем
значения функций на этих планах
равны: f(x*)=g(y*)
Теорема2: Если исходная и
двойственная задачи имеют
планы, то они имеют и
оптимальные планы, причем
f(x*)=g(y*)
46. Признаки оптимальности для двойственных задач
Признак1: Если исходная идвойственная задачи имеют планы X и
Y, причем f(X)=g(Y), то эти планы
оптимальные.
Определение: Ограничения
расположенные на одной строке в схеме
пары двойственных задач называют
сопряженными.
Признак2: Для того, чтобы планы X и
Y исходной и двойственной задач были
оптимальны, необходимо и достаточно
чтобы на этих планах хотя бы одно из
каждой пары сопряженных ограничений
являлось равенством.
Второй признак позволяет зная
оптимальный план одной из задач найти
оптимальный план другой задачи.
47. Решим исходную задачу симплекс методом:
f ( x) 3x1 12 x2 5x3 x4 max g ( y) 5 y1 7 y2 minx1 2 x2 x3 x4 5
5 x1 4 x2 x3 2 x4 7
y1 0
y2 0
y1 5y2 3
2 y1 4 y2 12
x1 0
x2 0
x3 0
x4 0
Ц
Б
П
y1 y2
5
y1 2y2 1
x1 x2
x3 x4 x5 x6
3
12
5
1
0
0
Ц
Б
П
x1
x2
x3 x4
x5
x6
3
12
5
1
0
0
0
x5 5
1
2
1
1
1
0
5
x3
3
-3
0
1
0
2
0
0
x6 -7
5
4
1
2
0
1
12
x2
1
2
1
0
1/2
-1/2
1/2
-3
-12
-5
-1
0
0
27
6
0
0
5
4
1
0
Ц
Б
П
x1 x2
x3 x4 x5 x6
3
12
5
1
0
0
5
x3 5
1
2
1
1
1
0
0
x6 2
4
2
0
1
-1
1
25 2
-2
0
4
5
0
X*=(0,1,3,0)
Оптимальные значения переменных
двойственной задачи можно найти в
последней симплекс таблице в индексной
строке под соответствующими
добавленными переменными.
Y*=(4,1)
48. Закрытая транспортная задача. Метод потенциалов
49. Определение
Закрытая транспортная задача – задача оперевозке однородной продукции, когда
имеется m поставщиков, для которых
известны запасы, и n потребителей, для
которых известны потребности, а также
известны стоимости перевозки одной
единицы продукции от каждого поставщика
к каждому потребителю, причем
суммарные запасы поставщиков равны
суммарным потребностям потребителей.
50. Постановка задачи
Требуется составить план перевозок –указать, какое кол-во продукции нужно
перевезти от каждого поставщика
каждому потребителю, чтобы:
Суммарная стоимость перевозок была
минимальна
Все поставщики были разгружены
Все потребители были удовлетворены
51. Обозначения
bi – множество поставщиковaj – множество потребителей
сij – цены перевозок единицы товара от
i-го поставщика к j-му потребителю
xij – планируемый объем перевозок от
i-го поставщика к j-му потребителю
52. Целевая функция
f(X)=ΣΣcijxij→min53. Представление задачи в виде таблицы
b1b2
b3
a1
c11
x11
c12
x12
с13
x13
a2
с21
x21
с22
x22
с23
x23
54. Двойственная задача
f(X)=c11x11+c12x12+c13x13+c21x21+c22x22+c23x23→min
g(U,V)=a1u1+a2u2+b1v1+b2v2+b3v3→max
x11+x12+x13 =a1
u1 ϵ R
x21+x22+x23 =a2
u2 ϵ R
x11 +x21 =b1
v1 ϵ R
x12 +x22 =b2
v2 ϵ R
x13 +x23 =b3
v3 ϵ R
x11≥0
u1 +v1 ≤ c11
x12≥0
u1+v2 ≤c12
x13≥0
u1+v3 ≤ c13
x21≥0
u2 +v1 ≤c21
x22≥0
x23≥0
u2 +v2 ≤c22
u2 +v3 ≤c23
55. Метод потенциалов
b1a1
a2
c11
b2
-
c12 +
x11
x12
c21 + c22 >
x22
v1
v2
b3
c13
u1
<
c23
x23
v3
u2
56. Практический пример
Σ=6012
15
17
16
10
14
13
12
15
20
16
17
18
22
30
14
15
16
11
57. Практический пример
Σ=6012
10
14
20
16
30
14
15
17
13
16
12
15
18
22
10
17
3
15
12
17
16
2
11
16
58. Практический пример
Σ=6012
10
14
20
16
30
14
15
17
13
16
12
15
-2
18
22
2
11
0
10
17
3
15
16
12
14
17
2
15
16
16
11
59. Практический пример
Σ=6010
20
30
12
15
14
<
16
=
14
17
13
-
12
+
15
10
17
+
22
3
11
2
15
<
17
16
12
<
>
18
-
15
14
16
=
16
16
11
-2
2
0
60. Практический пример
Σ=6012
10
14
20
16
30
14
15
17
13
12
<
15
=
17
10
18
=
7
16
12
<
11
2
15
<
22
13
15
14
16
=
16
16
11
-2
2
0
61. Практический пример
00
10
0
0
13
7
0
12
2
0
16
X*=
f(X*)= 120+221+126+168+30+176=841