









 Электроника
ЭлектроникаПохожие презентации:



")





")
Приведение параметров обмотки ротора к обмотке статора асинхронной машины. Векторная диаграмма асинхронного двигателя
1. АВИАЦИОННЫЕ И СПЕЦИАЛЬНЫЕ ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Тема 1.4. Трехфазные асинхронные электрические машиныЛекция 9
9.1 Приведение параметров обмотки ротора к
обмотке статора асинхронной машины.
9.2 Векторная диаграмма асинхронного двигателя .
9.3 Схема замещения асинхронного двигателя.
2.
9.1. Приведение параметров обмотки ротора кобмотке статора асинхронной машины
Чтобы векторы ЭДС, напряжений и токов обмоток
статора и ротора можно было изобразить на одной
векторной диаграмме следует параметры обмотки
ротора привести к обмотке статора, т. е. обмотку
ротора
с
числом
фаз
т2,
обмоточным
коэффициентом kоб2 и числом витков одной фазной
обмотки w2 заменить oбмоткой с т1, w1 и kоб1. При
этом мощности и фазовые сдвиги векторов ЭДС и
токов ротора после приведения должны остаться
такими же, что и до приведения. Пересчет реальных
параметров обмотки ротора на приведенные
выполняется по формулам, аналогичным формулам
приведения
параметров
вторичной
обмотки
трансформатора (см. разд. 1.5).
3.
При s=1 приведенная ЭДС ротораE2 E2 ke
где
E1 kоб1 w1
ke
E2 kоб 2 w2
(9.1)
— коэффициент
трансформации напряжения в асинхронной машине
при неподвижном роторе.
Приведенный ток ротора
где
m1 w1kоб1 m1ke
ki
m2 w2 kоб 2
m2
I2
I 2
ki
—коэффициент
трансформации тока асинхронной машины.
(9.2)
4.
В отличие от трансформаторов в асинхронныхдвигателях
коэффициенты
трансформации
напряжения и тока не равны (kе≠ki). Объясняется это
тем, что число фаз в обмотках статора и ротора в
общем случае не одинаково (m1≠m2). Лишь в
двигателях с фазным ротором, у которых m1=m2, эти
коэффициенты равны.
Активное и индуктивное приведенные
сопротивления обмотки ротора:
r2 r2 ke ki ;
x2 x2 ke ki
(9.3)
5.
Числофаз
короткозамкнутой
т2
и
число
обмотки
витков
ротора
w2
для
определяют
следующим образом. Каждый стержень этой обмотки
рассматривают как одну фазу, а поэтому число
витков одной фазы короткозамкнутой обмотки ротора
w2=0,5; обмоточный коэффициент такой обмотки
kоб2=1, а число фаз т2=Z2, т. е. равно числу стержней
в короткозамкнутой обмотке ротора.
6.
Подставив в (3.12) приведенные значенияпараметров обмотки ротора Е 2, I 2, r 2 и х 2, получим
уравнение напряжений обмотки ротора в приведенном
виде:
Величину
тогда
2 r2
I
E 2 jI 2 x2
0
s
r2
можно представить в виде
(9.4)
r2 r2 r2 s
1 s
r2 r2 r2
s s
s
s
(9.5)
s
уравнение
ЭДС
для
цепи
ротора
в
приведенных параметрах примет вид
1 s
E2 jI 2 x2 I 2 r2 I 2 r2
0
s
(9.6)
7.
9.2. Векторная диаграмма асинхронногодвигателя
Для асинхронного двигателя (так же как и для
трансформатора)
диаграмму.
можно
Основанием
построить
для
векторную
построения
этой
диаграммы являются уравнение токов (8.19) и
уравнения напряжений обмоток статора (8.5) и
ротора (8.11)
8.
Угол сдвига фаз между ЭДС Е 2 и током I 2x2 s
.
2 arctg
r2
Так как векторную диаграмму асинхронного
двигателя строят по уравнениям напряжений и токов,
аналогичным уравнениям трансформатора, то
порядок построения этой диаграммы такой же, что и
векторной диаграммы трансформатора.
9.
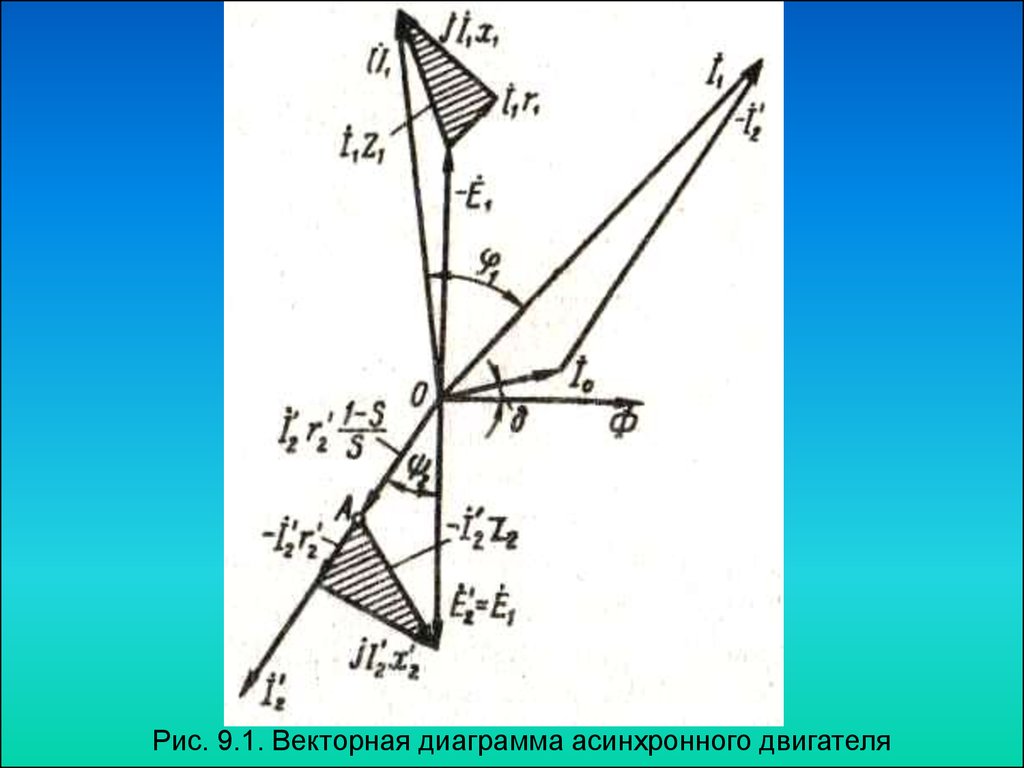
Рис. 9.1. Векторная диаграмма асинхронного двигателя10.
На рис. 9.1 представлена векторная диаграммаасинхронного двигателя. От векторной диаграммы
трансформатора (см. рис. 1.8) она отличается тем,
что сумма падений напряжения в обмотке ротора (во
вторичной обмотке) уравновешивается ЭДС
E 2
обмотки
так
неподвижного
ротора
обмотка ротора замкнута накоротко.
(n2=0),
как
11.
1 sОднако если падение напряжения OA I 2 r2
s
рассматривать
как
активной нагрузке
зажимы
напряжение
1 s ,
r2
s
неподвижного
диаграмму
рассматривать
как
некоторой
подключенной
ротора,
асинхронного
на
то
векторную
двигателя
векторную
на
можно
диаграмму
трансформатора, на зажимы вторичной обмотки
которого
подключено
сопротивление
1 s
.
r2
s
переменное
активное
12.
Иначеговоря,
электрическом
трансформатору,
асинхронный
двигатель
отношении
работающему
в
подобен
на
чисто
активную нагрузку. Активная мощность вторичной
обмотки такого трансформатора
1 s
P2 m1 I 2 r2
s
2
представляет
собой
полную
(9.7)
механическую
мощность, развиваемую асинхронным двигателем.
13.
9.3. Схема замещения асинхронного двигателяУравнениям
векторной
напряжений
диаграмме
соответствует
и
токов,
асинхронного
электрическая
схема
а
также
двигателя
замещения
асинхронного двигателя.
На рис. 9.2, а представлена Т-образная схема
замещения.
14.
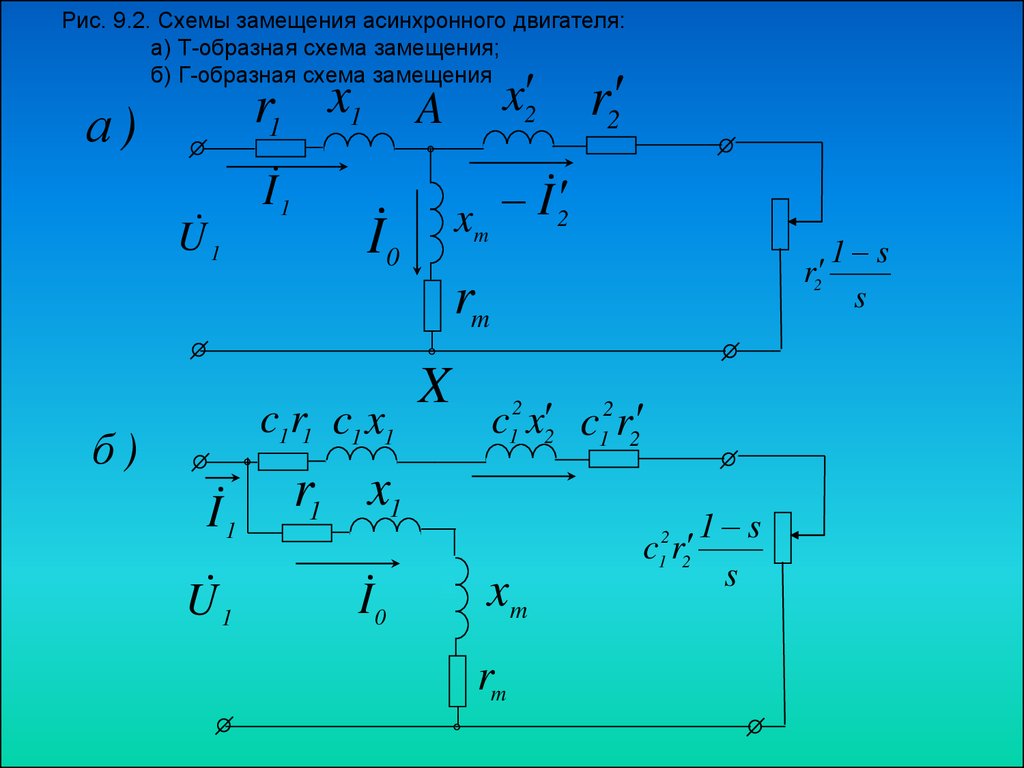
Рис. 9.2. Схемы замещения асинхронного двигателя:а) Т-образная схема замещения;
б) Г-образная схема замещения
r1 x1
а)
U 1
I 1
x2
A
r2
2
I
xm
I 0
r2
rm
c1r1 c1 x1
б)
I 1
U 1
X
c x2 c12 r2
2
1
r1 x1
I 0
c r
2
1 2
xm
rm
1 s
s
1 s
s
15.
Магнитная связь обмоток статора и ротора васинхронном
двигателе
на
схеме
замещения
заменена электрической связью цепей статора и
1
s
ротора. Активное сопротивление r2
s
можно рассматривать как внешнее сопротивление,
включенное обмотку неподвижного ротора. В этом
случае
асинхронный
трансформатору,
нагрузку.
двигатель
работающему
аналогичен
на
активную
16.
1 sСопротивление r2
s
переменный
сопротивления
параметр
—
схемы.
определяется
единственный
Значение
этого
скольжением,
а
следовательно, механической нагрузкой на валу
двигателя.
Так, если нагрузочный момент на валу двигателя
М2=0, то скольжение s≈0. При этом
1 s
r2
,
s
что соответствует работе двигателя в режиме ХХ.
17.
Если же нагрузочный момент на валу двигателяпревышает
его
вращающий
момент,
то
1 s
останавливается (s=1). При этом r2
0 ,
s
что
соответствует
режиму
КЗ
ротор
асинхронного
двигателя.
Более удобной для практического применения
является Г-образная схема замещения (рис. 9.2, б), у
которой намагничивающий контур (Zm=rm+jxm)
вынесен на входные зажимы схемы замещения.
18.
Чтобы при этом намагничивающий ток I0 неизменил
своего
значения,
в
этот
контур
последовательно включают сопротивления обмотки
статора r1 и x1.
Полученная таким образом схема удобна тем, что
она состоит из двух параллельно соединенный
контуров: намагничивающего с током
с током
I 2
.
I 0
и рабочего
19.
Расчетпараметров
рабочего
контура
Г-
образной схемы замещения требует уточнения, что
достигается
введением
в
расчетные
формулы
коэффициента с1 (рис. 9.2, б), представляющего
собой отношение напряжения сети U1 к ЭДС статора
Е1 при идеальном холостом ходе (s=0).
20.
Таккак
в
асинхронного
этом
режиме
двигателя
ток
холостого
весьма
мал,
то
хода
U1
оказывается лишь немногим больше, чем ЭДС Е1, а
U1
их отношение c1
E1 мало отличается от единицы.
Для двигателей мощностью 3 кВт и более
с1=1.05÷1.02, поэтому с целью облегчения анализа
выражений, характеризующих свойства асинхронных
двигателей и упрощения практических расчетов,
примем с1=1.
21.
Возникшие при этом неточности не превысятзначений, допустимых при технических расчетах.
Например, при расчете тока ротора I 2 эта ошибка
составит от 2 до 5 %% (меньшие значения относятся
к двигателям большей мощности).
22.
Воспользовавшись Г-образной схемой замещенияи приняв с1=1, запишем выражение тока в рабочем
контуре:
I 2
U1
r2 2
2
( r1 ) ( x1 x2 )
s
(9.8)
или с учетом (9.6) получим
U1
I 2
1 s 2
( r1 r2 r2
) ( x1 x2 )2
s
(9.9)
Знаменатель выражения (9.9) представляет собой
полное сопротивление рабочего контура Г-образной
схемы замещения асинхронного двигателя.