




















































 Промышленность
ПромышленностьПохожие презентации:
")









Введение. Сортировочные станции
1.
Введение. Сортировочные станции2.
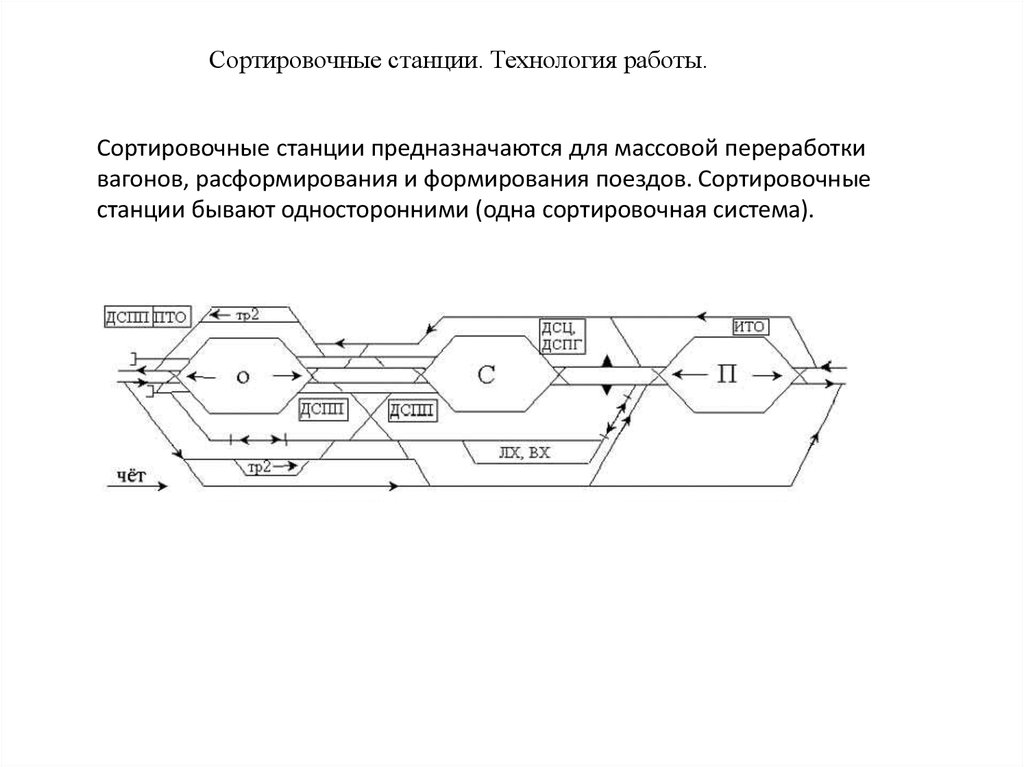
Сортировочные станции. Технология работы.Сортировочные станции предназначаются для массовой переработки
вагонов, расформирования и формирования поездов. Сортировочные
станции бывают односторонними (одна сортировочная система).
3.
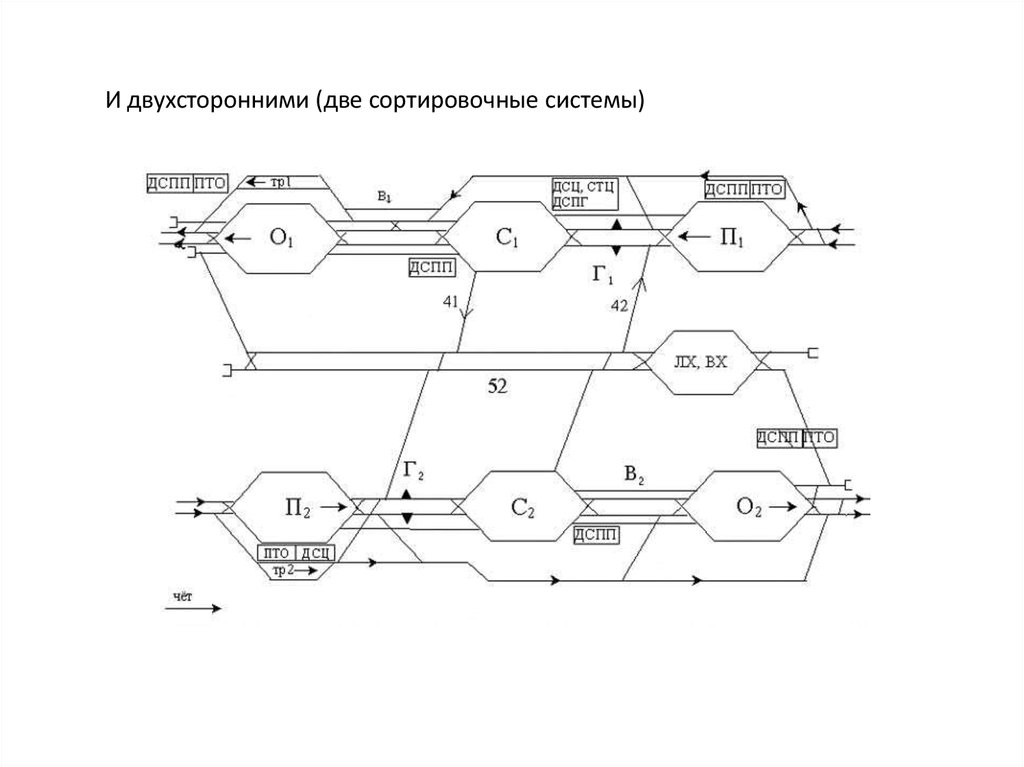
И двухсторонними (две сортировочные системы)4.
Сортировочная система станции состоит из парка приема «П»,сортировочной горки «Г», парка отправления «О».
На сортировочных станциях выполняются следующие операции:
В парке приема - подготовка прибывших поездов к расформированию;
На сортировочной горке - расформирование поездов и накопление
вагонов в сортировочном парке для формирования новых поездов;
В парке отправления - формирование поездов и подготовка
сформированных поездов к отправлению.
5.
Вопросы.1. Укажите на схеме станции местонахождения сортировочной горки.
2. Какие операции выполняются на сортировочной горке?
6.
Сортировочные горки.7.
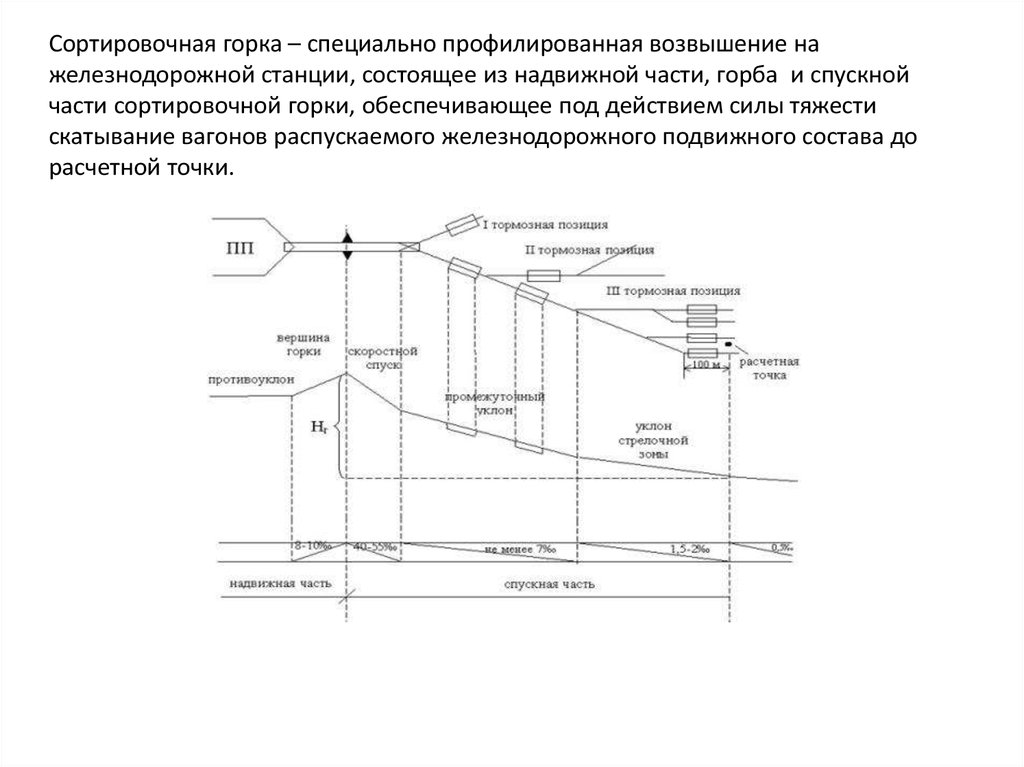
Сортировочная горка – специально профилированная возвышение нажелезнодорожной станции, состоящее из надвижной части, горба и спускной
части сортировочной горки, обеспечивающее под действием силы тяжести
скатывание вагонов распускаемого железнодорожного подвижного состава до
расчетной точки.
8.
Надвижная часть представляет собой наклонный участок пути, имеющийперед вершиной горки подъем обычно не менее 8‰ протяженность 50 м для
сжатия состава и облегчения расцепки вагонов перед горбом горки.
Спускная часть представляет собой участок между вершиной горки и
расчетной точкой, находящейся на расстоянии 50-100м от наиболее
удаленного предельного столбика входной горловины сортировочного парка.
Разность отметок между вершиной горки и расчетной точкой называется
высотой горки. Она должна обеспечивать скатывание вагона с плохими
ходовыми качествами при неблагоприятных условиях до расчетной точки.
9.
Горка механизированная сортировочная – сортировочная горка, оснащеннаявагонными замедлителями, которые располагаются на одной или более
тормозных позициях.
Горка автоматизированная сортировочная – механизированная сортировочная
горка, оснащенная средствами автоматизации технологических операций
дистанционного управления расформированием железнодорожных подвижных
составов.
10.
Технология работы горки заключается в следующем: состав надвигается из паркаприбытия по надвижной части до вершины горки и после отцепки составителем,
отцепленные вагоны (далее отцепы) скатываются в пределах спускной части под
действием силы тяжести без участия локомотива. Стрелки переводятся по маршруту
скатывания отцепов в интервалах между отцепами. Для создания интервалов между
отцепами на спускной части горки установлены вагонные замедлители интервальных
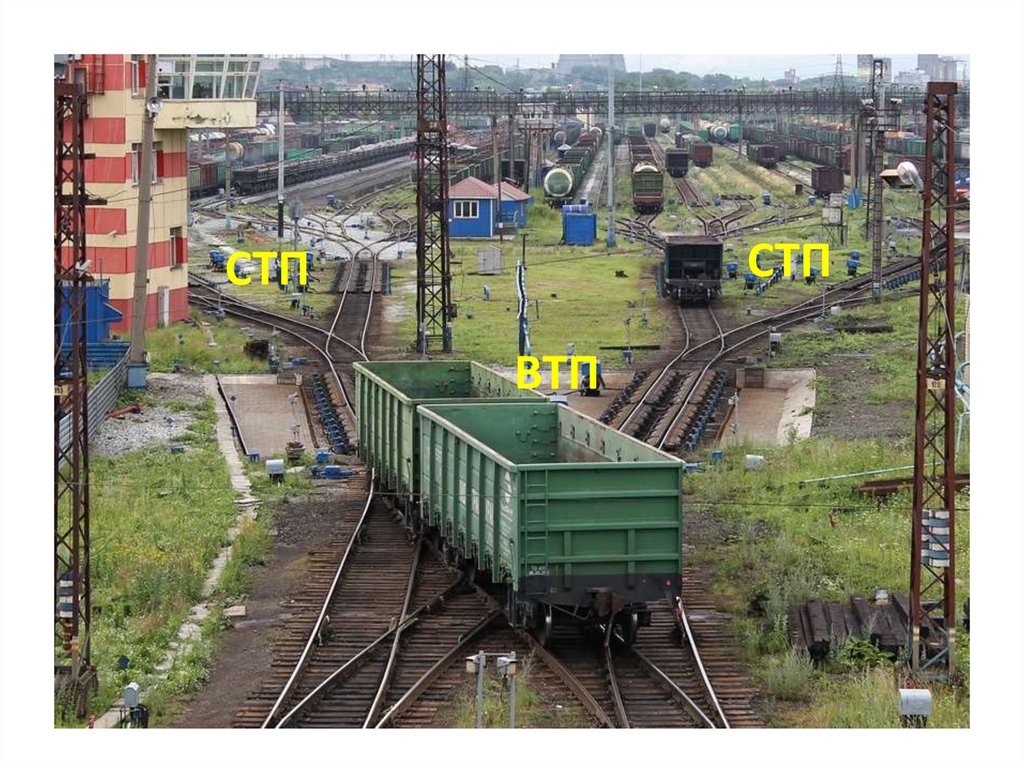
тормозной позиции I -верхней (ВТП) и II - средней (СТП).
11.
СТПСТП
ВТП
12.
Для защиты стрелок от перевода под отцепом в случае потери шунта, стрелкиоснащаются устройствами защиты от перевода по подвижным составом,
такими как:
1. Магнитные педали, устройства фиксирующие прохождения над ними колес
отцепов (применяются со схемой медленнодействующих повторителей).
Lпу
Lок
Lрц
13.
Широкое применение на железнодорожном транспорте нашли датчикимагнитоиндукционного типа. Бесконтактная магнитная педаль типа ПБМ-56 представляет
собой путевой датчик без источника питания, состоящий из постоянного магнита размером
60x68x80 мм с насаженной на него обмоткой, имеющей 5000 витков из провода ПЭЛШО
диаметром 0,27 мм. Сопротивление обмотки 300 Ом. Датчик устанавливают на рельс
внутри колеи. Верхнюю плоскость магнита располагают на 10 мм ниже головки рельса. При
прохождении колеса или другой ферромагнитной массы над педалью изменяется
конфигурация магнитного потока Ф, в результате чего в обмотке индуцируется ЭДС — Е:
E= - ω dФ/dt
Скорость прохождения колеса над педалью определяет скорость изменения
магнитного потока (dФ/dt) и, следовательно, значение выходного сигнала Е. В момент
проследования колеса над центром педали выходной сигнал меняет полярность.
Приемником сигнала от педали является поляризованное реле РП-7 в релейной ячейке
РЯ-ПБМ-56 (рис. 3.1).
14.
Более совершенным считается путевой датчик трансформаторного типа ДП-50 с преобразователемсигнала путевого датчика ПСДП-50 Принципиальной особенностью этого датчика является
возможность фиксации нулевых скоростей движения ТС. Чувствительный элемент датчика состоит из
двух стержневых магнитопроводов. На них надеты катушки с питающими обмотками ωпс, ωпк,
соединенными последовательно, и катушки с выходными обмотками ωвс и ωвк, которые включены
последовательно и встречно.
При подаче переменного напряжения на питающие обмотки создаются сигнальный Фс и
компенсационный Фк магнитные потоки. В отсутствие колеса над датчиком потоки замыкаются по
цепям: поток Фс -— через сигнальный магнитопровод, воздушные промежутки, головку рельса; поток
Фк — через компенсационный магнитопровод, воздушные промежутки, подошву рельса.
В отрегулированном датчике эти потоки одинаковы и по амплитуде и по фазе, следовательно, ЭДС,
индуцируемые в выходных обмотках, будут одинаковыми, а выходное напряжение на зажимах 3—4
равно нулю.
При появлении реборды колеса над датчиком воздушные промежутки сигнального стержня
уменьшаются. В результате увеличивается ЭДС, наводимая в обмотке ωвс. На выходе возникает разность ЭДС, являющаяся сигналом наличия колеса в зоне датчика. Сигнал передается по кабелю на
вход преобразователя ПСДП-50.
Преобразователь имеет: конденсатор С1; разделительный трансформатор Тр; выпрямительный
мост Д1—Д4; сглаживающий конденсатор С2; пороговый элемент на транзисторах Т1 и Т2.
15.
Датчик трансформаторного типаЕсли на входе преобразователя сигнала нет. то транзистор Т1 открыт положительным
потенциалом отделителя, образуемого резисторами R2 и R3. При увеличении сигнала до величины
порога срабатывания ток транзистора Т1 скачкообразно уменьшается, а транзистор Т2 открывается,
выдавая выходной сигнал. В этом состоянии преобразователь находится до тех пор, пока входное
напряжение не уменьшится до напряжения отпускания.
Пороговый элемент срабатывает при напряжении 1,2—1,3 В, а обесточивается при напряжении
0,5—0,6 В. Изменение зоны чувствительности датчика существенно зависит от ориентации датчика в
горизонтальной и вертикальной плоскостях, от износа рельса и проката бандажа.
16.
Датчики счета осей. Производится подсчет кол-ва осей на входе и на выходеконтролируемого участка. При совпадении кол-ва вошедших и вышедших осей
участок считается свободным.
Lучастка
В настоящее время используется УФПО-21.
17.
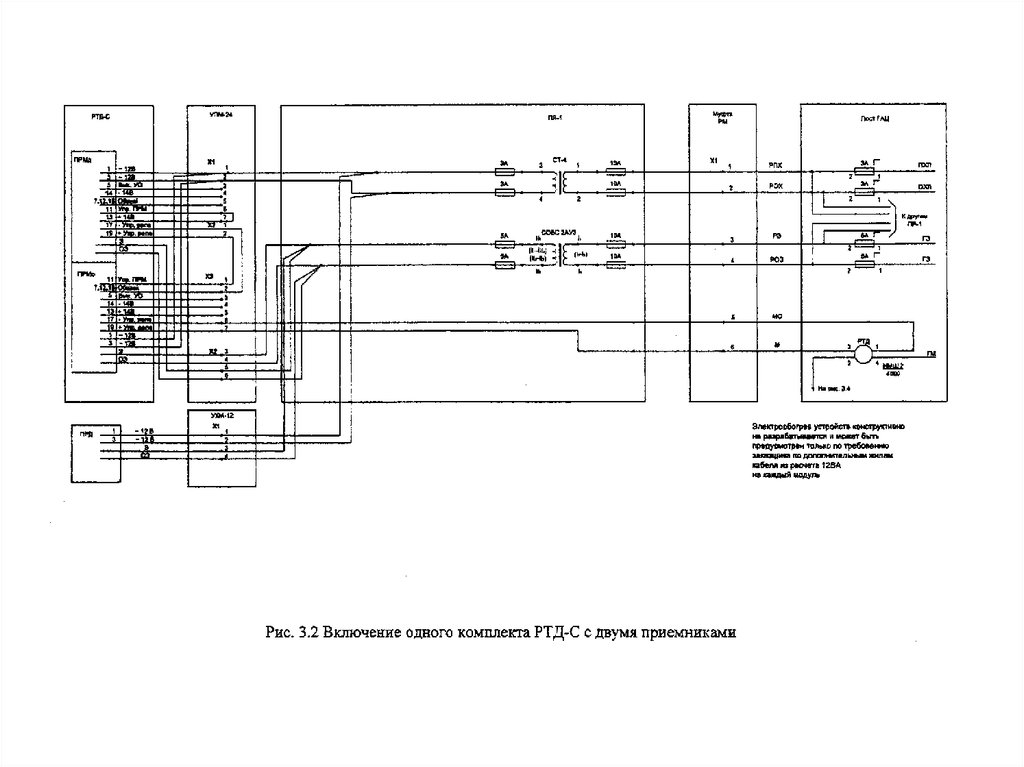
2. РТД-С – радиотехнический датчик стрелочный, принцип работы которогооснован на передаче сигнала радиочастотного диапазона от передатчика к
приемнику , которая прекращается при перекрытии пространства между
передатчиком и приемником находящимся на стрелочном участке отцепом.
Ранее использовались фотоэлектрические устройства (ФЭУ).
Lпу
Lок
Lрц
18.
РТД-С19.
20.
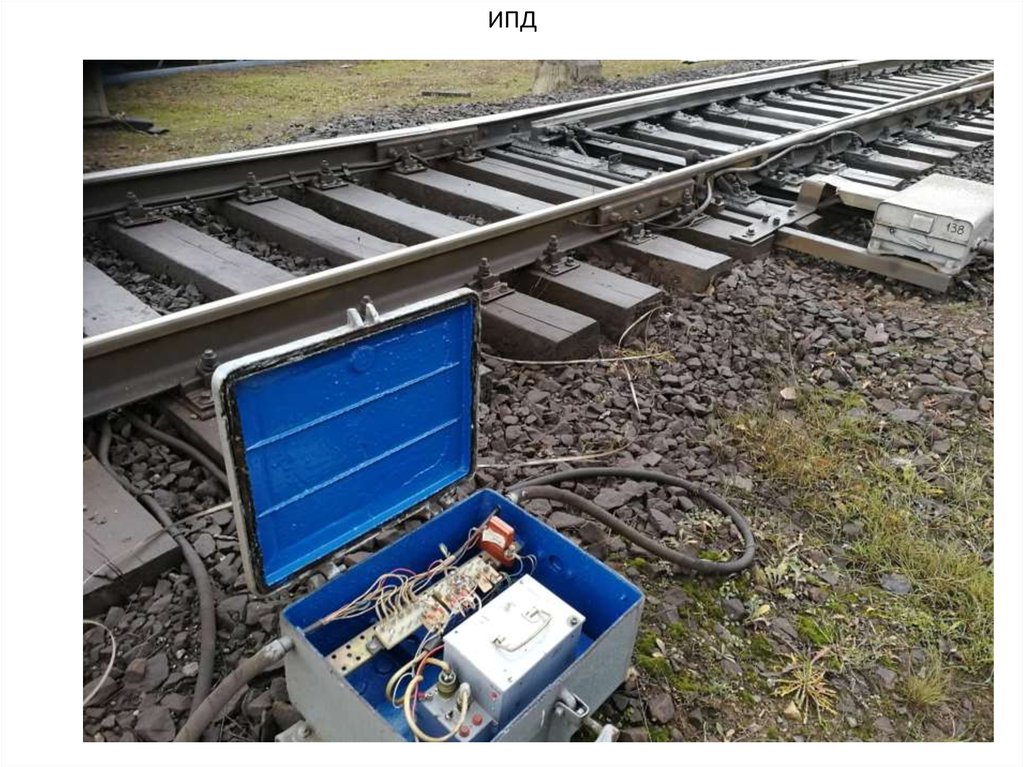
3. ИПД – индуктивно-проводной датчик. Датчик обеспечивает контрольсвободности или занятости участков пути от подвижного состава с
металлической ходовой частью в пределах уложенного шлейфа и вторичного
контура, образованного рельсовыми нитями, вторичной обмоткой путевого
трансформатора и шунтом от колесных пар вагона.
21.
ИПД22.
Для обеспечения скорости соударения движущихся отцепов с вагонами,стоящими в сортировочном парке не более 5 км/ч предназначена III парковая
(или нижняя) тормозная позиция (НТП) на которой осуществляется так называемое
прицельное торможение. При отсутствии НТП (либо нахождении вагонов выше
НТП) прицельное торможение осуществляется на СТП.
23.
НТП24.
Для автоматизации процесса торможения отцепов на ТП применяется системаавтоматического регулирования скорости скатывания отцепов (АРС). При этом
горка оборудуется следующими устройствами:
1. Измерительным участком, на котором производится измерение массы и
длины отцепа
2. Скоростемерами – для измерения скорости движения отцепа на ТП и
скорости надвига состава на горку
3. Устройствами контроля занятости путей сортировочного парка (КЗП)- для
определения расстояния от замедлителей НТП до стоящих на путях
сортировочного парка вагонов.
Также горки могут оборудоваться другими системами автоматизации, такими
как …
25.
Уклон и длина элементов профиля должны обеспечивать:интервалы между отцепами, позволяющие перевести стрелки при сохранении
расчетной скорости роспуска и исключение нагона отцепов;
установленную скорость входа вагонов на замедлители;
трогание с места плохих бегунов при неблагоприятных условиях в случае их
остановки при торможении;
исключение саморасцепа вагонов в месте сопряжения уклонов надвижной и
спускной части.
26.
Вопросы.1. Что такое механизированная сортировочная горка?
2. Что такое автоматизированная сортировочная горка?
3. Для чего предназначены замедлители интервальных тормозных позиций?
(для создания интервалов между движущимися отцепами, а также для
прицельного торможения на СТП при отсутствии нижней тормозной
позиции или нахождении вагонов выше НТП)
4. Для чего предназначены нижние (парковые) тормозные позиции?
5. Перечислите, что относится к устройствам защиты стрелок от перевода под
подвижным составом (педали, РТД-С, ИПД).
27.
Требования ПТЭ к сортировочным горкам28.
Согласно ПТЭ устройства механизации и автоматизации сортировочныхгорок должны обеспечивать непрерывное, бесперебойное и безопасное
расформирование составов с расчетной (проектной) скоростью роспуска, при
этом мощность тормозных средств на каждой тормозной позиции должна
позволять реализацию этой скорости и обеспечивать безопасность
сортировки вагонов.
На механизированных сортировочных горках стрелочные переводы,
участвующие при роспуске составов в распределении отцепов по
сортировочным железнодорожным путям, должны быть включены в
горочную электрическую или горочную автоматическую централизацию.
29.
Горочная централизация должна обеспечивать:индивидуальное управление стрелками;
электрическое замыкание всех пошерстных стрелок, по которым
осуществляется роспуск состава, а также охранных, исключающих выход
железнодорожного подвижного состава в зону роспуска;
контроль положения стрелок и занятости стрелочных секций на пульте
управления.
Горочная централизация не должна допускать перевода стрелки под
железнодорожным подвижным составом.
30.
Горочная автоматическая централизация стрелок, кроме того, должнаобеспечивать:
автоматическое управление стрелками распределительной зоны сортировочной
горки в процессе скатывания отцепов в программном или маршрутном режимах
работы;
автоматический возврат стрелки в контролируемое положение до вступления
отцепа на изолированную стрелочную секцию в случае возникновения в момент
перевода препятствия между остряком и рамным рельсом;
возможность перехода в процессе роспуска на индивидуальное управление
стрелками.
31.
Устройства автоматизированных сортировочных горок, кроме выполнениятребований, предъявляемых к механизированным горкам с горочной
автоматической централизацией, должны обеспечивать:
управление и контроль надвигом и роспуском составов;
автоматическое регулирование скорости скатывания отцепов;
контроль результатов роспуска составов;
обмен информацией с информационно-планирующей системой сортировочной
железнодорожной станции.
32.
Вопросы1. Что должна обеспечивать горочная централизация?
2. Что должна обеспечивать горочная автоматическая централизация?
33.
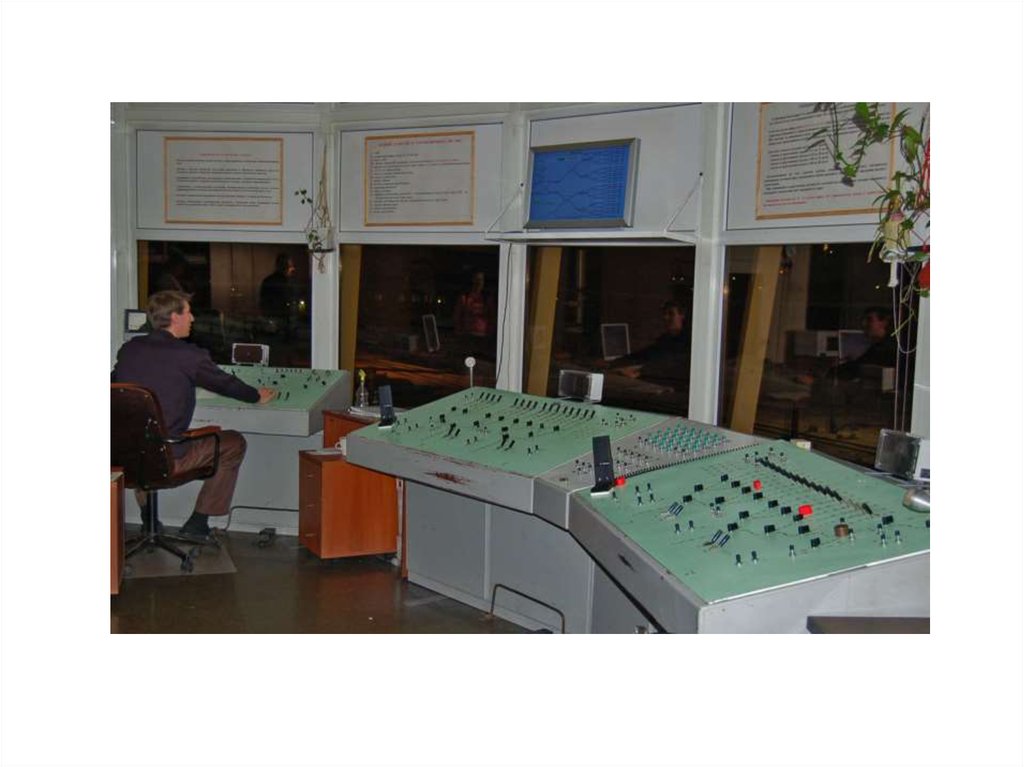
Горочный пультУправление устройствами сортировочной горки осуществляется дежурным
по горке (ДСПГ) и горочными операторами (ДСПГо) при помощи коммутаторов,
кнопок и рукояток, расположенных на пульте управления. ДСПГ располагается
за головной частью пульта и осуществляет управление горочными и
маневровыми сигналами, головными стрелками и стрелками в зоне надвига,
замедлителями ВТП. В зависимости от конструкции пульта головная часть
пульта может состоять из одной или нескольких секций.
Количество горочных операторов зависит от количества пучков и
составляет, как правило от 1 до 4. Операторы осуществляют управление
первыми пучковыми и последующими стрелками, замедлителями СТП и НТП и
маневровыми сигналами, расположенными в их зоне управления. Количество
секций пульта операторов определяется количеством пучков. Секция, как
правило, конструируются на 1 или 2 пучка. На некоторых сортировочных горках
управление замедлителями НТП осуществляется операторами НТП,
располагающимися в отдельных постах управления непосредственно на
нижней тормозной позиции.
34.
35.
Вопросы1. Кто управляет устройствами горки при роспуске поездов? (Управление
устройствами сортировочной горки осуществляется дежурным по горке (ДСПГ) и
горочными операторами (ДСПГо) ).
2. Сколько секций пульта управления горочных операторов имеется на горочном
посту? (количество горочных операторов и количество секций пульта операторов
определяется количеством пучков).
36.
Системы горочной автоматической централизации (ГАЦ)37.
На сегодняшний день наиболее распространенными системами ГАЦявляются:
1. БГАЦ – блочная система ГАЦ, речь о которой пойдет в данном курсе
2. КАЦ КР – система ГАЦ с контролем роспуска, в которой автоматизирован
не только процесс управления роспуском, но и контроль выполнения
программы роспуска, выдача дежурному исполненного сортировочного
листка на расформированный состав с указанием «чужаков».
3. ГАЦ МН – наиболее современная отечественная система ГАЦ на базе
микропроцессорной техники, обеспечивающая управление маршрутами
отцепов и накопление вагонов в сортировочном парке.
38.
В системе ГАЦ МН впервые в практике создания систем горочной централизацииреализовано отслеживание перемещения вагонов на спускной части горки по
счетчикам осей без использования рельсовых цепей в зоне от последних
разделительных стрелок до замедлителей 3-й тормозной позиции включительно, а
также без использования рельсовых цепей на промежуточных (межстрелочных)
участках.
ГАЦ МН помимо основной своей функции - управления маршрутами скатывания
отцепов – выполняет ряд дополнительных функций:
контроль исполненного роспуска с автоматической передачей в ИПУ СС сообщений
о вагонах, поступивших на пути сортировочного парка;
контроль маневровых перемещений вагонов на спускной части горки с передачей в
ИПУ СС сообщений о произведенных перестановках вагонов на путях
сортировочного парка со стороны горки. Для обеспечения безопасности роспуска в
ГАЦ МН реализованы алгоритмы программного автовозврата стрелки, защиты
стрелок от перевода под длиннобазными вагонами, исключения взреза стрелок
при маневрах, исключения возможности ударов в бок из-за негабарита. Для
заблаговременного определения возможных непереводов стрелок по маршруту
скатывания, применен принцип упреждающего перевода стрелок на всю длину
свободного пробега отцепа по маршруту.
39.
Вопросы1. Какие дополнительные функции реализованы в системе ГАЦ КР? (контроль
выполнения программы роспуска, выдача дежурному исполненного
сортировочного листка на расформированный состав с указанием «чужаков»).
40.
БГАЦ41.
БГАЦ общие сведения42.
Блочная горочная централизация (типовой альбом МГ-5) разработана в 1967году. С 1973 года проектируется по переработанному альбому МГ-26.
Назначение БГАЦ – автоматический перевод стрелок, участвующих в
распределении отцепов по сортировочным путям. Максимальная емкость
системы 64 пути – 8 пучков по 8 путей.
43.
В схемных решениях альбома МГ-26 предусматривается возможностьпараллельного роспуска составов, при наличии соответствующего
путевого развития.
44.
Для возможности параллельного роспуска помимо путевого развития , горкаоборудуется двумя головными секциями пульта управления. В режиме
параллельного роспуска поезда надвигаются по двум параллельным путям
надвига, при этом, сортировочная горка разделяется на две независимые зоны
управления, управление роспуском первого поезда ведется с основной
головной секции пульта на пути первой зоны, второго с дополнительной на пути
второй зоны. Также возможен роспуск одного поезда на все пути сортировочной
горки при управлении только с основной, или только с дополнительной
головной секции.
45.
Условно основные схемы ГАЦ можно разделить на следующие группы:- схемы формирования задания
- схемы трансляции задания.
- схемы увязки с ЭЦ парка приема.
- схемы исполнительных устройств.
В настоящем курсе будут рассмотрены схемы формирования и трансляции
задания, имеющие непосредственное отношение к системе БГАЦ и выполненные
по альбому МГ-26, оставшиеся схемы выполнены по другим альбомам (в
частности МГ-48) и могут существовать независимо от системы БГАЦ.
46.
Вопросы1. Какова емкость системы БГАЦ? (8 пучков по 8 путей)
2. Для чего горка оборудованная БГАЦ может иметь две головных
секции пульта управления? (для возможности осуществления
параллельного роспуска).
47.
Блоки БГАЦ48.
Типовые решения БГАЦ предполагаютпостроение принципиальных схем на
релейных блоках типов: I-62, II-67, III-67,
IV-66, БН-62. Помимо вышеуказанных
блоков в схемах управления стрелками
используются блоки СГ-76 У для
управления стрелочным
электроприводом СПГБ-4 (данные блоки
заменили ранее использовавшиеся с
приводами типа СПГ блоки СГ-66 ) и блоки
медленнодействующих повторителей
педалей БМП-62, которые в настоящее
время практически не применяются ввиду
замены педалей другими устройствами
защиты от перевода стрелок под
подвижным составом, такими как ИПД.
Неблочные схемы выполнены на реле
типа НМШ.
49.
Ниже представлен общий вид блоков I-62, II-67, III-67, IV-66, БН-6250.
Блоки БН-62 используются в качестве блоков накопления заданий в ступеняхсхемы накопления задания. (можно заменить фотографией и схемой из
альбома)
51.
Блок I -62 – используется в схемах трансляции задания, где необходиматрансляция задания пути и выбор одного их двух направлений (пучков). Данный
блок можно заменить двумя блоками типа II-67
52.
Блок II-67 – используется для трансляции задания пути и пучка, а также вкачестве блоков формирования и регистрации задания.
53.
Блок III-67 – используется в качестве блока трансляции задания к последнимстрелкам (выбор из двух направлений), состоит из двух одинаковых частей,
т.е транслирует задание к двум последним стрелкам.
54.
Блок IV-66 – используется в схемах формирования задания на головной и первыхстрелках пучков.
55.
Вопросы1. Перечислите типы блоков, используемых в системе БГАЦ.
56.
Блочный план горки57.
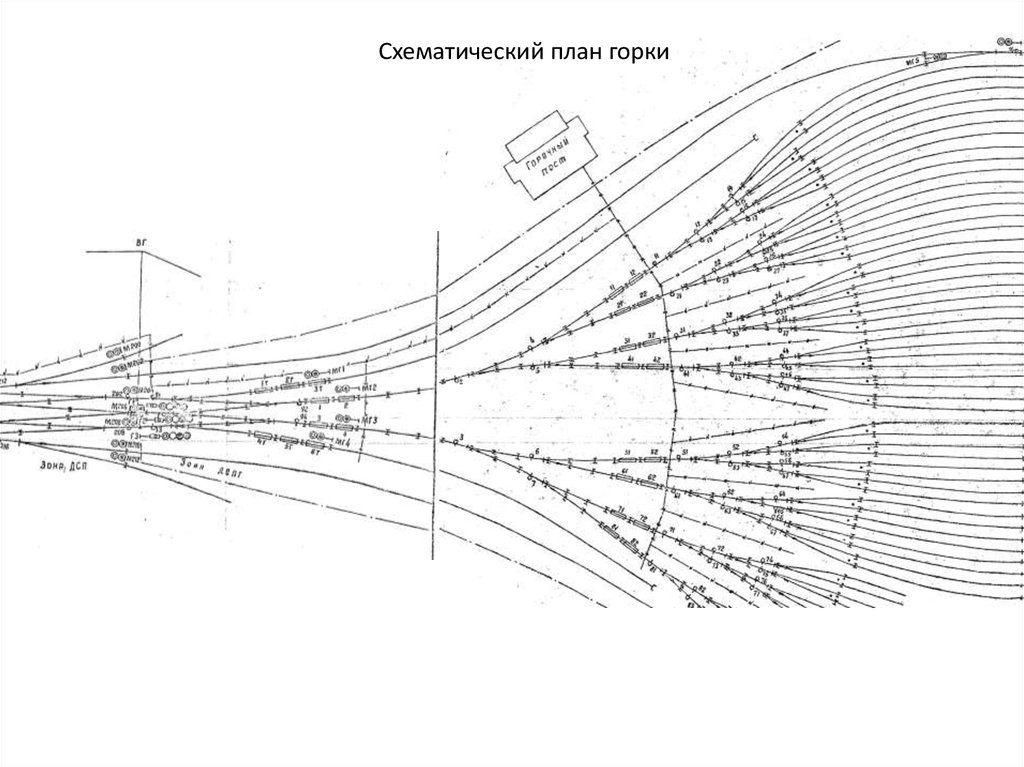
Схематический план горки58.
Блочный план вышеприведенной горки(формирование задания)
ПВПГ, ДВПГ – реле включения программного режима с основной и дополнительной головной секции пульта
РГ 1,2,3, ДРГ 1,2,3 – реле выбора направления роспуска(откуда надвигается поезд)
59.
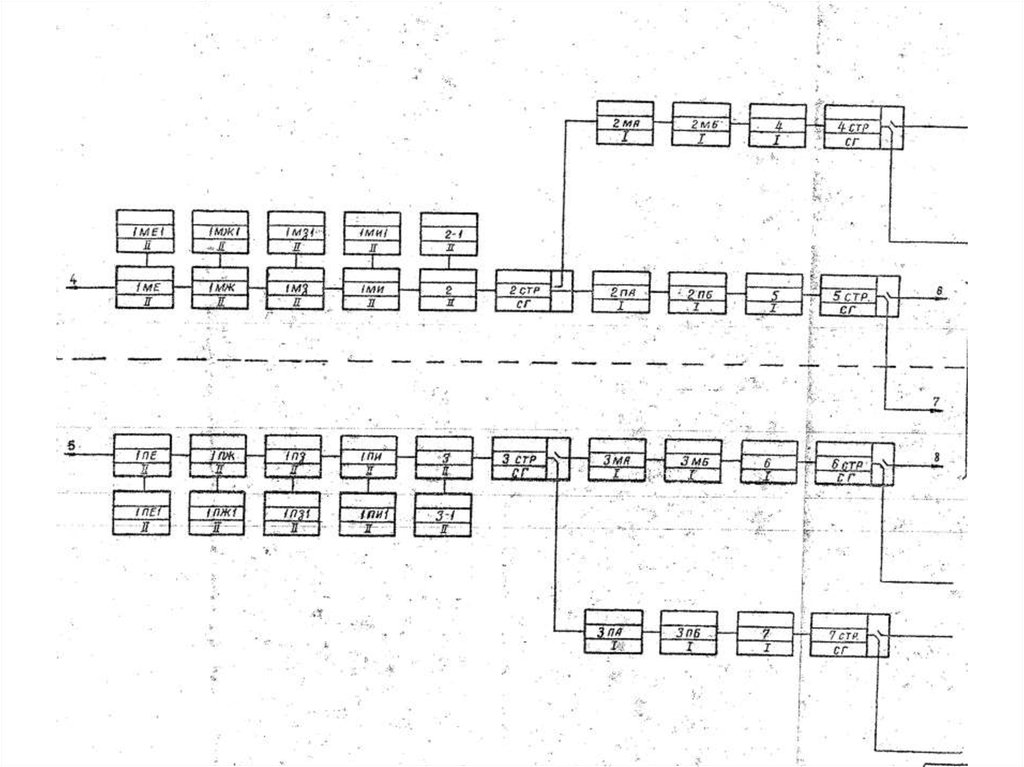
Трансляция задания60.
61.
62.
Режимы работы БГАЦ(рассмотрено для управления всей горкой с основной
головной секции пульта)
БГАЦ может функционировать в 4 режимах:
1.
2.
3.
4.
Ручном
Маршрутном
Программном
Автоматическом
63.
Ручной режим подразумевает управление стрелками с помощью стрелочныхрукояток, включение остальных режимов производится нажатием
соответствующих кнопок:
М – маршрутный,
П – программный,
А – автоматический .
При включении режима индикаторная лампа над его кнопкой загорается
белым цветом, выключение режима производится повторным нажатием
соответствующей ему кнопки или кнопки включения другого режима.
64.
Схема включения режимов работы ГАЦ65.
1. Ручной – управление всеми стрелками производится с помощью стрелочныхкоммутаторов.
2. Маршрутный – каждому отцепу ДСПГ с помощью кнопок на пульте управления
задает маршрут, далее по маршруту движения отцепа стрелки переводятся
автоматически.
3. Программный – перед роспуском ДСПГ вводит в накопитель системы ГАЦ задания
для отцепов в соответствии с данными сортировочного листка (максимальное
количество отцепов определяется емкостью накопителя), во время роспуска
программа роспуска реализуется автоматически.
4. Автоматический режим может быть реализован при оснащении сортировочной
горки с БГАЦ дополнительными устройствами, такими как ГПЗУ (горочное
программно-задающее устройство) или СПУД (система программного управления
движением). В этом режиме данные сортировочного листка в электронном виде
передаются на устройства ГПЗУ (СПУД), преобразуются и выдаются в систему ГАЦ
по мере прохождения отцепов, в данном случае вся программа роспуска
осуществляется автоматически, ДСПГ не требуется вводить в систему задания
маршрутов.
66.
Вопросы1. Подставь недостающий блок в блочный план…
2. В каких режимах работы может функционировать БГАЦ?