





















 Промышленность
ПромышленностьПохожие презентации:










Контактный электрический транспорт
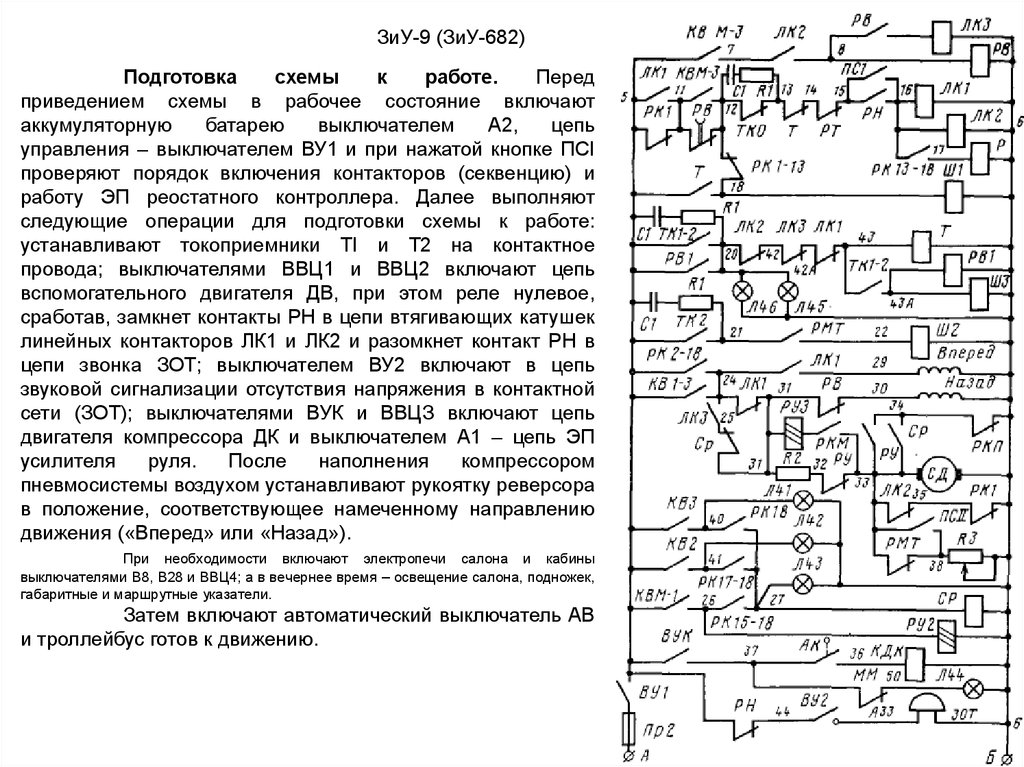
1.
Контактный электрический транспорт2.
Контактный электрический транспорт может быть выполнен как спитанием на постоянном токе, так и на переменном токе промышленной частоты.
Переменный ток используется на магистральных железнодорожных путях с
напряжением в контактной сети 25 кВ. В условиях города по правилам
электробезопасности использования напряжения более 1000 в воздушной
контактной сети запрещено. А при таком уровне напряжения использования
переменного тока малоэффективно из-за высокой индуктивности контактной сети.
На Украине на городском электротранспорте используется постоянный ток
напряжением 600 В для трамваев и троллейбусов и 825 В для метрополитена, за
рубежом - 550-750 В постоянного тока для трамваев и 750-1100 В - для
метрополитена.
На электрическом подвижном составе могут применяться тяговые
электродвигатели (ТЭД) как постоянного тока, так и двигатели переменного тока
(синхронные или асинхронные). Использование ТЭД переменного тока требует
применения статических преобразователей, что усложняет электрическую схему
подвижного состава. Однако такие ТЭД имеют значительно более высокую
надежность по сравнению с машинами постоянного тока.
3.
Требования к тяговому электрооборудованию подвижного составагородского электрического транспорта
К тяговому электрооборудованию (ЭлОб) относятся электрические двигатели, тяговые
электрические аппараты, системы управления и источники питания подвижного состава. Тяговое ЭлОб
подвижного состава работает в более тяжелых условиях по сравнению с ЭлОб стационарных установок и к
нему предъявляются следующие требования:
1) Механическая часть ЭлОб работает при частых ударных нагрузках. Это требует повышенной
механической и электрической устойчивости деталей и узлов ЭлОб и высокой надежности их крепления.
Для уменьшения ударных нагрузок необходимо, чтобы все ЭлОб было подрессоренным.
2) ЭлОб чаще всего работает на открытом воздухе, в условиях повышенной влажности, больших
перепадов температур. Необходимо, чтобы изоляционные детали имели влагостойкую изоляцию, а все
металлические детали были защищены антикоррозийным покрытием.
3) Номинальное напряжение, применяемое на городском электротранспорте, выше, чем в
большинстве промышленных установок. Это повышает требования к коммутационной надежности ТЭД и
вспомогательных высоковольтных ЭМ. Эти машины должны быть рассчитаны на работу в переходных
режимах, которые связаны с изменением напряжения в контактной сети, проездом спецчастей и работой
ЭлОб.
4) Электрический подвижной состав работает с разной нагрузкой на переменном профиле,
параметры воздуха (влажность и температура), который охлаждает ЭлОб, могут иметь широкий диапазон
значений, что приводит к широкому диапазону изменения сопротивлений обмоток и токоведущих частей
ЭлОб. Тяговые ЭД и электрические аппараты должны надежно работать при самых негативных
совпадениях температуры обмоток и напряжения в контактной сети.
5) Пространство для размещения и монтажа ЭлОб на подвижном составе ограничено. Поэтому
тяговое ЭлОб должно иметь минимальные габаритные размеры и массу.
6) Отказ в работе ЭлОб на линии (особенно рельсового транспорта) приводит к нарушению
графика движения. Поэтому ЭлОб должно иметь высокую надежность и хороший доступ для обслуживания
и ремонта. Конструкция ЭлОб должна позволять быструю замену неисправных деталей и узлов.
4.
По своему назначению тяговое ЭлОб можно разделить на следующие группы:а) тяговые электродвигатели.
б) тяговые электрические аппараты.
в) вспомогательные электрические машины.
г) источника питания цепей управления, освещения и сигнализации.
В ЭлОб автономного и комбинированного подвижного состава входят автономные источники
питания ТЭД (тяговая аккумуляторная батарея или тяговый генератор с устройствами для регулирования
напряжения).
По системе возбуждения разделяют ЭД последовательного, смешанного параллельного и
независимого возбуждения. Наиболее приспособленными для условий тяги является ТЭД
последовательного возбуждения. Они имеют следующие преимущества по сравнению с двигателями
параллельного возбуждения:
- Тяговые характеристики позволяют лучше использовать подвижной состав и устройства
электроснабжения в условиях переменных нагрузок;
- При параллельной работе двигателей более равномерно распределяется нагрузка между
двигателями в результате "мягких" скоростных характеристик;
- Значительно лучше работают в переходных режимах, из-за большой коммутационной
устойчивости к появлению кругового огня;
- При одинаковой мощности имеют меньший вес и габаритные размеры за счет уменьшения
объема изоляции обмотки последовательного возбуждения.
Двигатели параллельного возбуждения не используются как тяговые, так как имеют различные
значения постоянных времени цепей якоря и обмотки возбуждения. Поэтому при переходных процессах
изменение магнитного потока значительно отстает от тока якоря, что приводит к возникновению кругового
огня.
Двигатели смешанного возбуждения занимают промежуточное положение между двигателями
последовательного и параллельного возбуждения. Их широкое использование обусловлено в первую
очередь простотой регулирования частоты вращения за счет использования шунтирующей обмотки (по
сравнению с двигателями последовательного возбуждения) и возможности перехода в тормозной режим
без усложнения схемы силовой цепи.
5.
Источники питания и электрические аппараты цепей сигнализации комплектуются изстандартного ЭлОб автобусов или машин специального назначения. Большинство аппаратов с
индивидуальным приводом выполняют на базе стандартных электрических аппаратов для промышленных
установок.
При регулировании ТЭД системы управления должны выполнять следующие функции:
1) соединение ТЭД к контактной сети и отключение от нее по желанию водителя или автоматически (при
перегрузках, к.з., исчезновении напряжения в контактном проводе, превышении напряжения);
2) переключения ступеней пуско-тормозных резисторов;
3) переключения ступеней в цепи возбуждения ТЭД для изменения его магнитного потока;
4) переключения ТЭД с одной группы на другую;
5) переключения ТЭД из тяги на торможение и наоборот;
6) включения режима торможения и переключения с одного вида торможения на другое;
7) изменение направления движения подвижного состава (реверс);
8) отключение части двигателей при аварийных режимах.
Перечисленные операции предполагаются не на всех типах подвижного состава. Например, на
троллейбусах и некоторых типах трамваев не предусматривается перегруппировка ТЭД, не на всех типах
подвижного состава существуют аварийные силовые схемы.
Системы управления ТЭД в зависимости от вида пусковых устройств разделяют на ступенчатые
и плавные.
Систему управления необходимо строить с учетом следующих требований:
- Операции по управлению ТЭД должны выполняться простыми и легко запоминающимися движениями
(рукоятками или педалями контроллера управления), причем одновременно нельзя использовать более
одной педали или рукоятки;
- Все рукоятки и педали должны быть сблокированы, чтобы исключить возможность ложных движений и
обеспечить при любых условиях более безопасный режим - торможение;
- Отказ в работе любого электрического аппарата не должна вызывать возникновение вместо тормозного
режима тягового;
- Должно быть обеспечено максимальное упрощение работы водителя - легкое и доступное обслуживание
ЭлОб в эксплуатации;
- Обеспечение минимальных габаритов и веса электрического оборудования, а также минимальной
стоимости системы управления и затрат на обслуживание.
6.
ОСОБЕННОСТИ ХАРАКТЕРИСТИК ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙПОСТОЯННОГО ТОКА
Наиболее распространенными типами двигателей на подвижном составе
электрического транспорта являются ДПТ с последовательным и смешанным возбуждением.
городского
Преимущества. Двигатели с последовательным возбуждением требуют меньшего числа
троллеев для подвода электропитания, характерный пример этого – ЭП трамваев и троллейбусов.
Двигатели с последовательным и смешанным возбуждением имеют большую (по сравнению с двигателями
независимого возбуждения) перегрузочную способность по моменту, эти двигатели более надежны (особенно
двигатели последовательного возбуждения, имеющие малое межвитковое напряжение в обмотке возбуждения), не боятся
снижения напряжения в питающей сети. При применении рассматриваемых двигателей для ЭП
механизмов с резкими пиками нагрузки мягкость механической характеристики (особенно в области малых
нагрузок) обеспечит таким приводам преимущество. При пике нагрузки двигатель автоматически снижает
скорость, разряжая запас кинетической энергии на вал рабочей машины. При этом ограничивается
величина бросков тока в якоре. Малые грузы поднимаются с большей скоростью, а большие – с малой
скоростью. Причем это производится автоматически за счет специфики механических характеристик, а не
за счет сложных регулирующих устройств.
Недостатки. Двигатели со смешанным и последовательным возбуждением нельзя включать в
сеть вхолостую или с малой статической нагрузкой, так как скорость их в этих случаях превысит
допустимые значения, и наступит «разнос» двигателя, сопровождающийся повреждением бандажей и
обмоток под действием центробежных усилий.
Двигатели с последовательным и смешанным возбуждением имеют большую стоимость по
сравнению с двигателями независимого возбуждения той же мощности и скорости. Это объясняется
большим расходом активных материалов (железа и меди) для обеспечения большей перегрузочной
способности по току и моменту.
7.
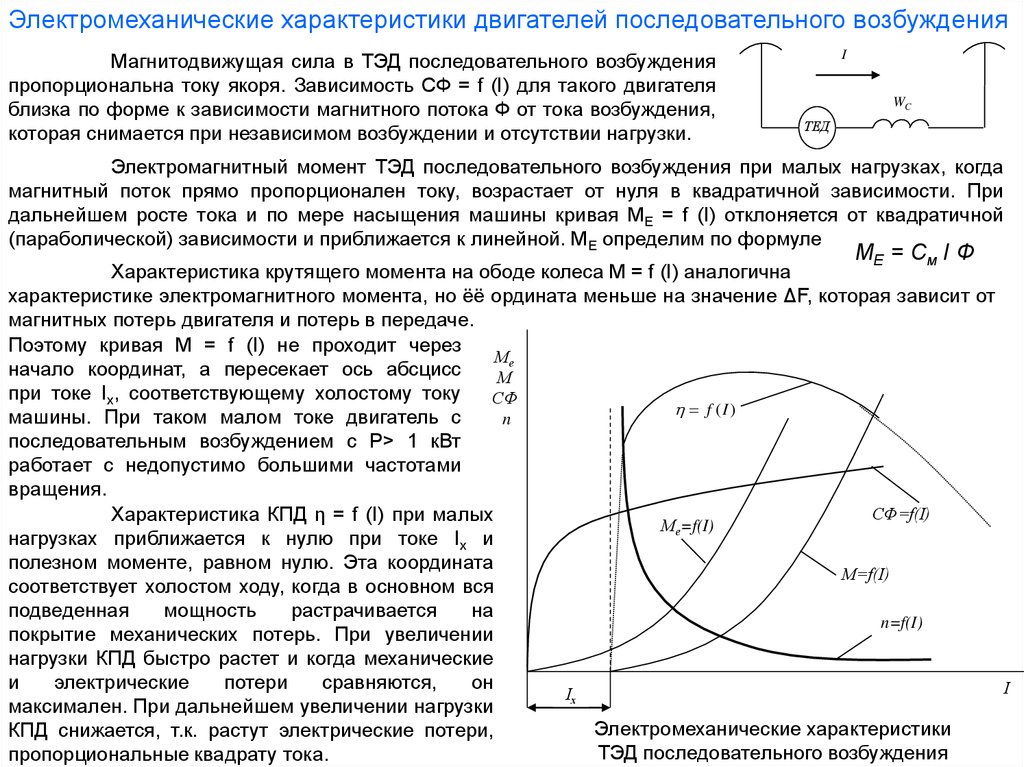
Электромеханические характеристики двигателей последовательного возбужденияМагнитодвижущая сила в ТЭД последовательного возбуждения
пропорциональна току якоря. Зависимость СФ = f (I) для такого двигателя
близка по форме к зависимости магнитного потока Ф от тока возбуждения,
которая снимается при независимом возбуждении и отсутствии нагрузки.
I
WC
ТЕД
Электромагнитный момент ТЭД последовательного возбуждения при малых нагрузках, когда
магнитный поток прямо пропорционален току, возрастает от нуля в квадратичной зависимости. При
дальнейшем росте тока и по мере насыщения машины кривая МЕ = f (I) отклоняется от квадратичной
(параболической) зависимости и приближается к линейной. МЕ определим по формуле
М Е = См І Ф
Характеристика крутящего момента на ободе колеса М = f (I) аналогична
характеристике электромагнитного момента, но ёё ордината меньше на значение ΔF, которая зависит от
магнитных потерь двигателя и потерь в передаче.
Поэтому кривая М = f (I) не проходит через
Ме
начало координат, а пересекает ось абсцисс
М
при токе Iх, соответствующему холостому току
СФ
f (I )
машины. При таком малом токе двигатель с
n
последовательным возбуждением с Р> 1 кВт
работает с недопустимо большими частотами
вращения.
СФ=f(I)
Характеристика КПД η = f (I) при малых
Ме=f(I)
нагрузках приближается к нулю при токе Iх и
полезном моменте, равном нулю. Эта координата
М=f(I)
соответствует холостом ходу, когда в основном вся
подведенная
мощность
растрачивается
на
n=f(I)
покрытие механических потерь. При увеличении
нагрузки КПД быстро растет и когда механические
и
электрические
потери
сравняются,
он
І
Іх
максимален. При дальнейшем увеличении нагрузки
Электромеханические характеристики
КПД снижается, т.к. растут электрические потери,
ТЭД последовательного возбуждения
пропорциональные квадрату тока.
8.
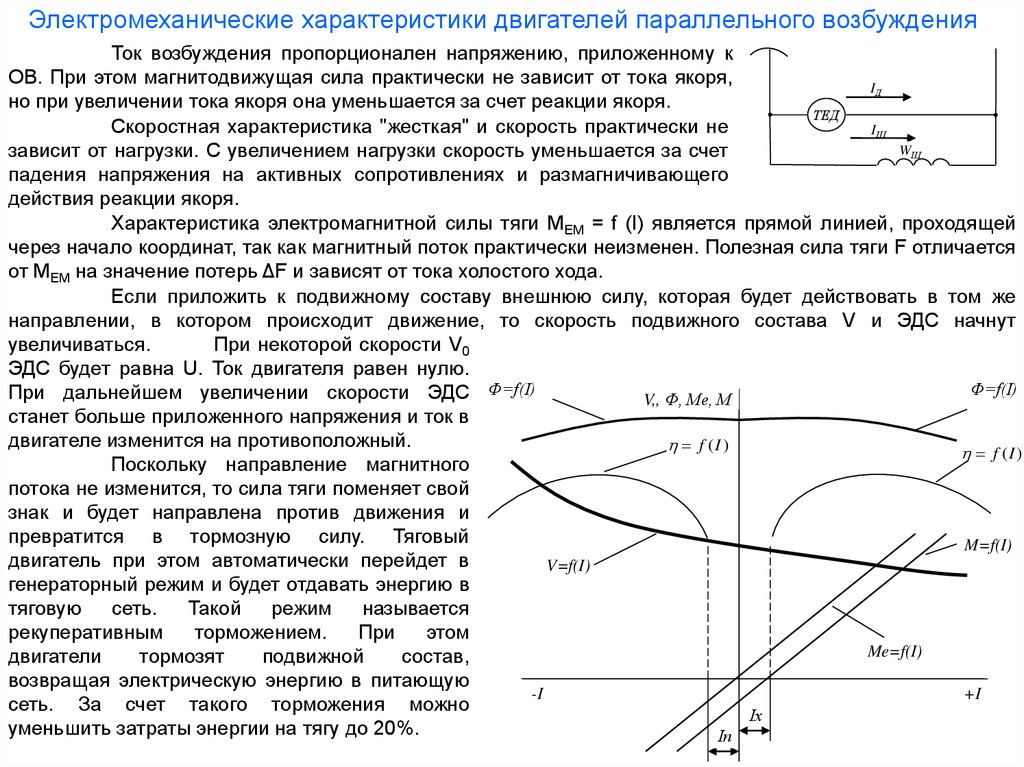
Электромеханические характеристики двигателей параллельного возбужденияТок возбуждения пропорционален напряжению, приложенному к
ОВ. При этом магнитодвижущая сила практически не зависит от тока якоря,
IД
но при увеличении тока якоря она уменьшается за счет реакции якоря.
ТЕД
Скоростная характеристика "жесткая" и скорость практически не
IШ
WШ
зависит от нагрузки. С увеличением нагрузки скорость уменьшается за счет
падения напряжения на активных сопротивлениях и размагничивающего
действия реакции якоря.
Характеристика электромагнитной силы тяги МEM = f (I) является прямой линией, проходящей
через начало координат, так как магнитный поток практически неизменен. Полезная сила тяги F отличается
от МEM на значение потерь ΔF и зависят от тока холостого хода.
Если приложить к подвижному составу внешнюю силу, которая будет действовать в том же
направлении, в котором происходит движение, то скорость подвижного состава V и ЭДС начнут
увеличиваться.
При некоторой скорости V0
ЭДС будет равна U. Ток двигателя равен нулю.
Ф=f(I)
При дальнейшем увеличении скорости ЭДС Ф=f(I)
V,, Ф, Ме, М
станет больше приложенного напряжения и ток в
двигателе изменится на противоположный.
f (I )
f (I )
Поскольку направление магнитного
потока не изменится, то сила тяги поменяет свой
знак и будет направлена против движения и
превратится в тормозную силу. Тяговый
M=f(I)
двигатель при этом автоматически перейдет в
V=f(I)
генераторный режим и будет отдавать энергию в
тяговую
сеть.
Такой
режим
называется
рекуперативным
торможением.
При
этом
Me=f(I)
двигатели
тормозят
подвижной
состав,
возвращая электрическую энергию в питающую
-I
+I
сеть. За счет такого торможения можно
Іх
уменьшить затраты энергии на тягу до 20%.
Іп
9.
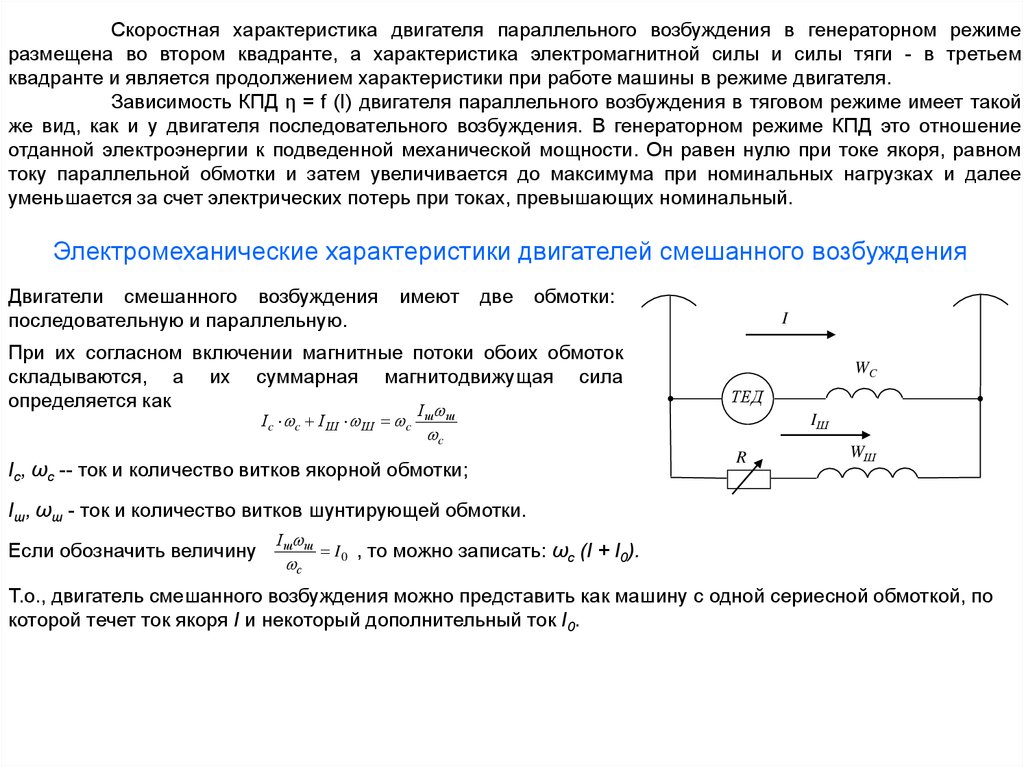
Скоростная характеристика двигателя параллельного возбуждения в генераторном режимеразмещена во втором квадранте, а характеристика электромагнитной силы и силы тяги - в третьем
квадранте и является продолжением характеристики при работе машины в режиме двигателя.
Зависимость КПД η = f (I) двигателя параллельного возбуждения в тяговом режиме имеет такой
же вид, как и у двигателя последовательного возбуждения. В генераторном режиме КПД это отношение
отданной электроэнергии к подведенной механической мощности. Он равен нулю при токе якоря, равном
току параллельной обмотки и затем увеличивается до максимума при номинальных нагрузках и далее
уменьшается за счет электрических потерь при токах, превышающих номинальный.
Электромеханические характеристики двигателей смешанного возбуждения
Двигатели смешанного возбуждения
последовательную и параллельную.
имеют
две
обмотки:
I
При их согласном включении магнитные потоки обоих обмоток
складываются, а их суммарная магнитодвижущая сила
определяется как
І
І c c І Ш Ш c
WC
ТЕД
ш ш
IШ
c
Іс, ωс -- ток и количество витков якорной обмотки;
R
WШ
Іш, ωш - ток и количество витков шунтирующей обмотки.
Если обозначить величину
І ш ш
с
I 0 , то можно записать: ωс (I + I0).
Т.о., двигатель смешанного возбуждения можно представить как машину с одной сериесной обмоткой, по
которой течет ток якоря I и некоторый дополнительный ток I0.
10.
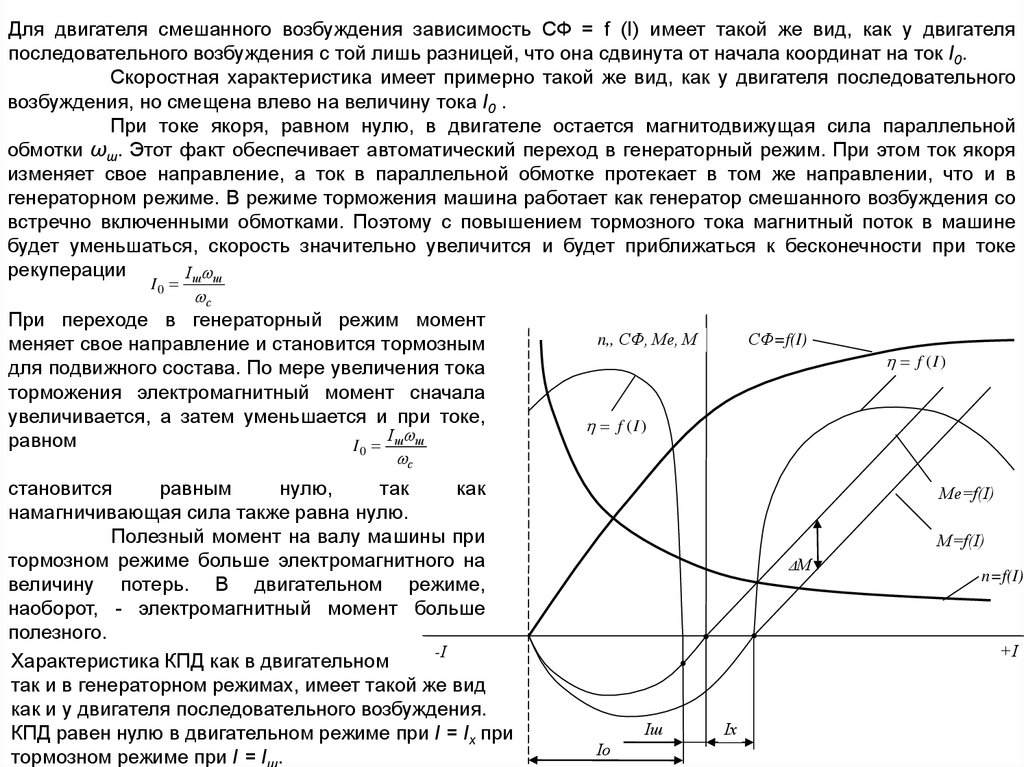
Для двигателя смешанного возбуждения зависимость СФ = f (I) имеет такой же вид, как у двигателяпоследовательного возбуждения с той лишь разницей, что она сдвинута от начала координат на ток I0.
Скоростная характеристика имеет примерно такой же вид, как у двигателя последовательного
возбуждения, но смещена влево на величину тока I0 .
При токе якоря, равном нулю, в двигателе остается магнитодвижущая сила параллельной
обмотки ωш. Этот факт обеспечивает автоматический переход в генераторный режим. При этом ток якоря
изменяет свое направление, а ток в параллельной обмотке протекает в том же направлении, что и в
генераторном режиме. В режиме торможения машина работает как генератор смешанного возбуждения со
встречно включенными обмотками. Поэтому с повышением тормозного тока магнитный поток в машине
будет уменьшаться, скорость значительно увеличится и будет приближаться к бесконечности при токе
рекуперации
І ш ш
I0
с
При переходе в генераторный режим момент
меняет свое направление и становится тормозным
для подвижного состава. По мере увеличения тока
торможения электромагнитный момент сначала
увеличивается, а затем уменьшается и при токе,
І
равном
I0 ш ш
n,, СФ, Ме, М
СФ=f(I)
f (I )
f (I )
с
становится
равным
нулю,
так
как
намагничивающая сила также равна нулю.
Полезный момент на валу машины при
тормозном режиме больше электромагнитного на
величину потерь. В двигательном режиме,
наоборот, - электромагнитный момент больше
полезного.
-І
Характеристика КПД как в двигательном
так и в генераторном режимах, имеет такой же вид
как и у двигателя последовательного возбуждения.
КПД равен нулю в двигательном режиме при I = Iх при
тормозном режиме при I = Iш.
Ме=f(I)
М=f(I)
ΔМ
n=f(I)
+І
Іш
Іо
Іх
11.
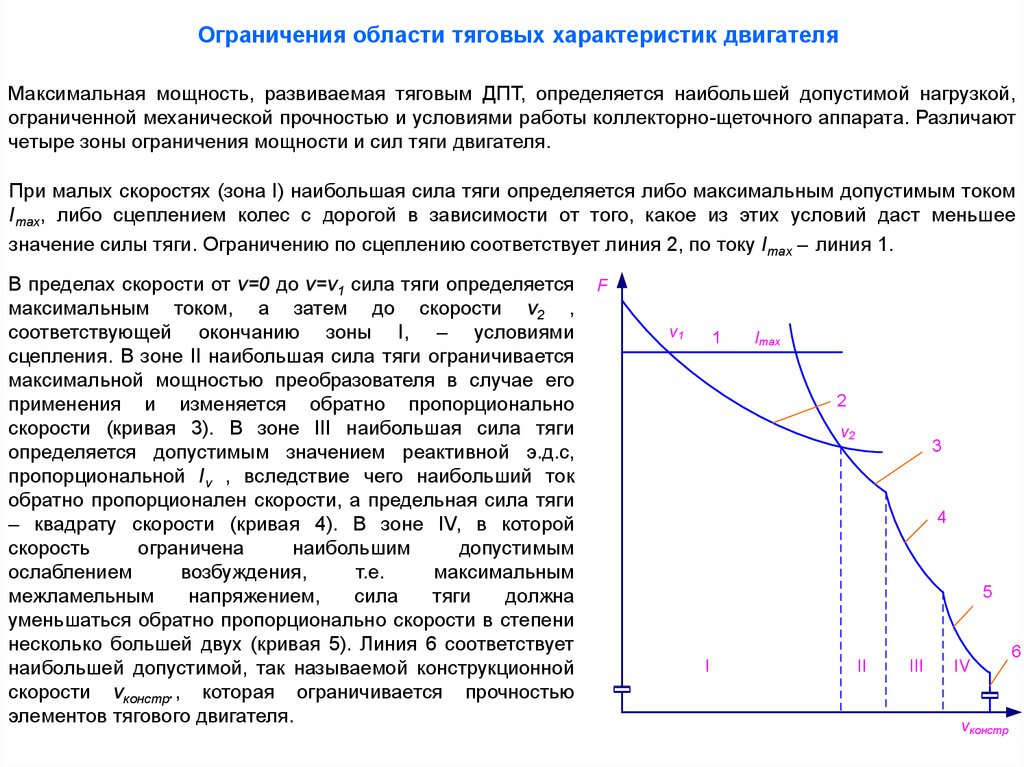
Ограничения области тяговых характеристик двигателяМаксимальная мощность, развиваемая тяговым ДПТ, определяется наибольшей допустимой нагрузкой,
ограниченной механической прочностью и условиями работы коллекторно-щеточного аппарата. Различают
четыре зоны ограничения мощности и сил тяги двигателя.
При малых скоростях (зона I) наибольшая сила тяги определяется либо максимальным допустимым током
Imax, либо сцеплением колес с дорогой в зависимости от того, какое из этих условий даст меньшее
значение силы тяги. Ограничению по сцеплению соответствует линия 2, по току Imax – линия 1.
В пределах скорости от v=0 до v=v1 сила тяги определяется
максимальным током, а затем до скорости v2 ,
соответствующей окончанию зоны I, – условиями
сцепления. В зоне II наибольшая сила тяги ограничивается
максимальной мощностью преобразователя в случае его
применения и изменяется обратно пропорционально
скорости (кривая 3). В зоне III наибольшая сила тяги
определяется допустимым значением реактивной э.д.с,
пропорциональной Iv , вследствие чего наибольший ток
обратно пропорционален скорости, а предельная сила тяги
– квадрату скорости (кривая 4). В зоне IV, в которой
скорость
ограничена
наибольшим
допустимым
ослаблением
возбуждения,
т.е.
максимальным
межламельным
напряжением,
сила
тяги
должна
уменьшаться обратно пропорционально скорости в степени
несколько большей двух (кривая 5). Линия 6 соответствует
наибольшей допустимой, так называемой конструкционной
скорости vконстр., которая ограничивается прочностью
элементов тягового двигателя.
F
v1
1
Imax
2
v2
3
4
5
I
II
III
IV
vконстр
6
12.
Тяговые характеристики двигателейТяговые
характеристики
двигателей
разных
систем
возбуждения приведены на рис. Как видно из этого рисунка, у
тяговой
характеристики
двигателя
последовательного
возбуждения (кривая I) в зоне малых скоростей сила тяги при
увеличении скорости резко падает. При некотором дальнейшем
увеличении скорости изменение силы тяги незначительно.
Тяговая характеристика двигателя параллельного возбуждения
(кривая 2) жесткая (близка к прямой вертикальной линии). При
некоторой скорости она пересекает ось абсцисс и
продолжается в области отрицательных (тормозных) сил.
Тяговые характеристики двигателей
системы возбуждения:
1 - последовательного;
2 - параллельного;
3 - согласно-смешанного;
Fл - сила тяги локомотива;
Вл - тормозная сила
v - скорость
Кривая 3 отображает тяговую характеристику
согласно-смешанного возбуждения.
двигателя
Тяговая характеристика с регулируемым независимым
возбуждением может быть любой из требуемых и
располагается в области ограничений, показанных на
предыдущем рис.
13.
Требования к тяговым электродвигателям:- электрическая и механическая устойчивость;
- равномерное распределение нагрузок между параллельно работающими двигателями;
- максимальное использование сцепного веса;
- устойчивость коммутации;
- наименьшее воздействие на энергосистему;
- возможность плавного регулирования скорости и применения рекуперации;
- простота конструкции.
Анализ работы в режиме тяги двигателей различных систем возбуждения показывает, что
наибольшей электрической и механической устойчивостью обладают ЭД последовательного и согласносмешанного возбуждения; благоприятное распределение нагрузок имеет место у ЭД с мягкими
характеристиками (ТЭД последовательного возбуждения); наилучшее использование сцепного веса — у двигателей с
жесткими характеристиками (ТЭД параллельного и независимого возбуждения). Однако в последних двух случаях
существенное значение имеет схема соединения ЭД.
На подвижном составе, как правило, установлено несколько ЭД, которые могут быть включены
как последовательно, так и параллельно. При последовательном соединении нескольких ЭД
характеристика двигателя, связанного с боксующей колесной парой, становится мягкой, так как
напряжение на боксующем двигателе повышается, вызывая дальнейшее увеличение скорости его
вращения.
Можно показать, что при последовательном соединении z двигателей скорость скольжения боксующей колесной пары возрастает в z
раз по сравнению со скоростью скольжения при двигателе, непосредственно включенном на постоянное напряжение. Соответственно в z раз
уменьшается жесткость тяговой характеристики двигателя, связанного с боксующей колесной парой.
Т.о., последовательное включение двигателей, несмотря на лучшее распределение сил тяги между двигателями, значительно менее
благоприятно с точки зрения использования сцепного веса, чем параллельное. Недостатком последовательного включения является и то, что с
увеличением скорости скольжения боксующей колесной пары падает ток, а соответственно, и сила тяги всех двигателей, соединенных
последовательно с боксуюшим. С точки зрения надежности коммутации и воздействия на систему энергоснабжения наилучшими свойствами
обладают двигатели с мягкими характеристиками.
Регулирование скорости и рекуперация лучше осуществляются у двигателей параллельного и
согласно-смешанного возбуждения. Преимуществом этих двигателей является автоматический переход в
генераторный режим, что позволяет легко осуществлять рекуперативное торможение. Еще лучшие
регулировочные свойства у двигателя независимого возбуждения.
14.
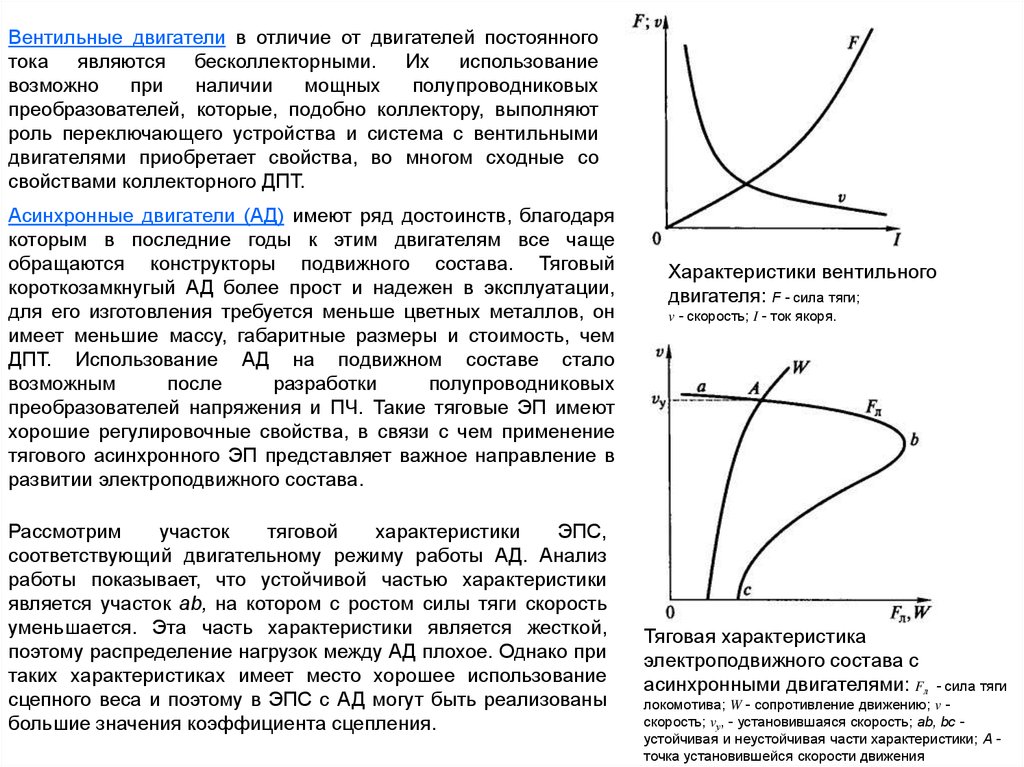
Вентильные двигатели в отличие от двигателей постоянноготока являются бесколлекторными. Их использование
возможно
при
наличии
мощных
полупроводниковых
преобразователей, которые, подобно коллектору, выполняют
роль переключающего устройства и система с вентильными
двигателями приобретает свойства, во многом сходные со
свойствами коллекторного ДПТ.
Асинхронные двигатели (АД) имеют ряд достоинств, благодаря
которым в последние годы к этим двигателям все чаще
обращаются конструкторы подвижного состава. Тяговый
короткозамкнугый АД более прост и надежен в эксплуатации,
для его изготовления требуется меньше цветных металлов, он
имеет меньшие массу, габаритные размеры и стоимость, чем
ДПТ. Использование АД на подвижном составе стало
возможным
после
разработки
полупроводниковых
преобразователей напряжения и ПЧ. Такие тяговые ЭП имеют
хорошие регулировочные свойства, в связи с чем применение
тягового асинхронного ЭП представляет важное направление в
развитии электроподвижного состава.
Рассмотрим
участок
тяговой
характеристики
ЭПС,
соответствующий двигательному режиму работы АД. Анализ
работы показывает, что устойчивой частью характеристики
является участок аb, на котором с ростом силы тяги скорость
уменьшается. Эта часть характеристики является жесткой,
поэтому распределение нагрузок между АД плохое. Однако при
таких характеристиках имеет место хорошее использование
сцепного веса и поэтому в ЭПС с АД могут быть реализованы
большие значения коэффициента сцепления.
Характеристики вентильного
двигателя: F - сила тяги;
v - скорость; I - ток якоря.
Тяговая характеристика
электроподвижного состава с
асинхронными двигателями: Fл
- сила тяги
локомотива; W - сопротивление движению; v скорость; vу, - установившаяся скорость; аb, bс устойчивая и неустойчивая части характеристики; А точка установившейся скорости движения
15.
Состояние и перспективы развития электротрансмиссий для электрического и гибридного транспорта на 2015 годЭлектрические машины тягового электропривода
Человечество уже применило все типы электрических машин в тяге, но пока не
было подходящих электрических преобразователей, очевидный выбор был сделан в
пользу ЭП постоянного тока с последовательным возбуждением. С появлением полностью
управляемых полупроводниковых ключей в транспорте стали появляться новые типы ЭП.
Анучин А.С.,
Козаченко В.Ф.,
Лашкевич М.М.,
Остриров В.Н.,
Русаков А.М.
Можно выделить четыре основных типа двигателей и приводов нового поколения:
- асинхронный (АД),
- синхронный с постоянными магнитами (СДПМ),
- вентильно-индукторный (ВИД),
- вентильно-индукторный с независимым возбуждением (ВИДсНВ).
1 Асинхронный.
Основной общепромышленный привод.
Активно применяется в тяге: электровозы, автомобили (Tesla Motors). Достаточно хорошо
подходит для колесного и ЖД транспорта без применения коробок переключения передач, так как имеется
возможность работать в режиме постоянства выходной мощности в широком диапазоне скоростей. К
недостаткам можно отнести следующие моменты.
Диапазон постоянства мощности хуже, чем у ВИД и ВИДсНВ. Потери в роторной цепи надо
отводить. Примерно 1/3 потерь выделяется в роторе машины. В автомобилях Tesla Motors было
реализовано запатентованное решение в виде полого стаканообразного ротора, которое позволяет
сделать эффективный теплоотвод тосолом, однако данное решение ограничивает свободу
конструктивного размещения машины в установке, увеличивает габариты.
Данный тип привода имеет несколько большую установленную мощность преобразователя (2030% по току) по сравнению с СДПМ и ИМсНВ.
16.
Состояние и перспективы развития электротрансмиссий для электрического и гибридного транспорта на 2015 годЭлектрические машины тягового электропривода
Анучин А.С.,
Козаченко В.Ф.,
Лашкевич М.М.,
Остриров В.Н.,
Русаков А.М.
Cинхронный с постоянными магнитами СДПМ
Категорически не подходит для колесных транспортных средств и ЖД транспорта за счет очень
малой зоны работы с постоянством мощности (отношение максимальной скорости к номинальной не
более 1,5–2). По этой причине применяется только в городских автобусах (Siemens, предполагаемое
ограничение скорости 50–60км/ч), но не в рейсовых.
Между тем, применение возможно во флоте и на моторных самолетах, так как у гребного винта
и винта самолета максимальная нагрузка приходится на максимальную скорость, что идеально подходит
данному типу двигателя.
Но при этом машина имеет существенные недостатки. Из-за наличия постоянных магнитов
двигатель при вращении становится генератором. В случае отказа двигателя или его силового
преобразователя во избежание пожара (вследствие наведенной ЭДС) требуется затормозить и
зафиксировать вал гребного винта или пропеллера механически, или расцепить вал рабочего органа и
двигатель. Кроме того, сборку и разборку двигателя можно осуществлять только в заводских условиях с
применением специального оборудования из-за огромной силы, возникающей между постоянными
магнитами и статором машины.
Данный тип двигателя считается наиболее энергоемким, так как применение постоянных
магнитов снижает долю активных частей (железа и меди) цепей возбуждения примерно на 20-40%, однако
сильное взаимодействие между постоянными магнитами и статором требует значительного усиления
конструкции двигателя, что в большинстве случаев не позволяет сократить массу двигателя.
Двигатель имеет большие потери холостого хода, уменьшающие эффективность движения на
большой скорости с невысокой нагрузкой (движение по трассе). Появляется проблема с перегревом
двигателя при буксировке с выключенной системой охлаждения.
17.
Состояние и перспективы развития электротрансмиссий для электрического и гибридного транспорта на 2015 годЭлектрические машины тягового электропривода
Анучин А.С.,
Козаченко В.Ф.,
Лашкевич М.М.,
Остриров В.Н.,
Русаков А.М.
Вентильно-индукторный ВИД
Один из двигателей, чья характеристика (так считается) идеально подходит для транспортных
применений. Он действительно может быть выполнен в меньших габаритах, чем аналогичный
асинхронный двигатель, но силовой преобразователь имеет в два раза больше элементов, а токовая
нагрузка также выше, чем в классических трехфазных машинах, где обмотки соединены в звезду. Итог:
очень большой, избыточный преобразователь. По неподтвержденной информации данный тип привода предполагается
использовать в системе электрического руления самолетов, которую для SSJ-100 и MC-21 разрабатывает АЭРОЭЛЕКТРОМАШ.
Двигатель имеет еще одно важное преимущество по сравнению с асинхронной машиной,
заключающееся в сильной разнице индуктивностей разных фаз в зависимости от положения, что
позволяет сделать систему полностью бездатчикового или самосенсорного управления (когда сама
магнитная система двигателя выступает в роли датчика положения ротора).
Вентильно-индукторный с независимым возбуждением ВИДсВН
Представляет собой гибрид вентильно-индукторного двигателя и синхронной машины с
независимым возбуждением. Математическое описание ВИДсНВ совпадает с математическим описанием
синхронной машины и простую конструкцию.
Машина хорошо управляема, регулируется момент, постоянство мощности поддерживается в
широком диапазоне скоростей (до 17 к 1). Машина может быть секционирована (несколько статорных
обмоток на один ротор) для увеличения надежности и увеличения мощности.
В настоящее время поставлены эксперименты и разрабатывается система самосенсорного
управления, позволяющая исключить датчик положения ротора для увеличения надежности системы.
Принцип самосенсорного управления строится на анализе магнитной анизотропии ЭД, которая меняется
при изменении положения ротора, как это классически применяется для машин с постоянными магнитами.
Например, инжекция высокочастотного сигнала в напряжение статора приводит к появлению
высокочастотной составляющей тока, годограф которого однозначно определяет положение ротора
двигателя.
Данное решение нельзя реализовать для АД.
18.
Состояние и перспективы развития электротрансмиссий для электрического и гибридного транспорта на 2015 годПерспективы развития тягового электропривода
Очевидно, что в следующие несколько лет должны выделиться явные лидеры
по типам двигателей и их применимости в разных задачах. Пока в этом творится полная
неразбериха. Она происходит из-за стремления разработчиков использовать свои
наработки в тяге из других областей. И пока уровень оптимизации еще далек от
предельного, а полностью технические характеристики до конца не раскрыты и не
исследованы, разные типы приводов конкурируют друг с другом в одних условиях.
Анучин А.С.,
Козаченко В.Ф.,
Лашкевич М.М.,
Остриров В.Н.,
Русаков А.М.
Вторую жизнь получают ЭП постоянного тока, если к ним добавить совершенный силовой
преобразователь. Считается, что тяговая характеристика ДПТ тока с последовательным возбуждением
является характеристикой с постоянством мощности, однако это не так. С уменьшение тока возбуждения
падает ток якорной цепи, и зависимость момента получается обратно пропорциональной квадрату
скорости. Применение же силовых преобразователей позволяет построить систему управления с
раздельным регулированием токов обмотки возбуждения и якорной цепи и относительно простым
способом получить не только характеристики с постоянством мощности, но и режим рекуперативного
торможения, в который можно попасть практически мгновенно без реверса тока возбуждения релейноконтакторным оборудованием.
Немалые усилия тратятся на разработку самосенсорных (без применения датчика положения
или скорости) систем управления. Это направление активно развивается, однако промышленных решений
не так много. Самосенсорное управления позволяет избавиться от относительно ненадежного датчика
положения ротора.
Положение определяется за счет инжекции тестового сигнала и анализа отклика для определения текущей магнитной геометрии
машины, являющейся функцией положения ротора. Такой метод определения положения не опирается на измерение ЭДС и применим от нулевых
скоростей. Кроме того, установка датчика нежелательна по экономическим соображениям и из-за ограничений, накладываемых на конструкцию.
Задача так и не была решена в полном объеме для асинхронных двигателей из-за очень малой магнитной анизотропии машины,
однако для остальных типов машин она реализуема. И если для СДПМ есть проблемы с идентификацией положения с точностью до половины
оборота, то для ВИД и ВИДсНВ положение может быть определено в любой момент времени.
19.
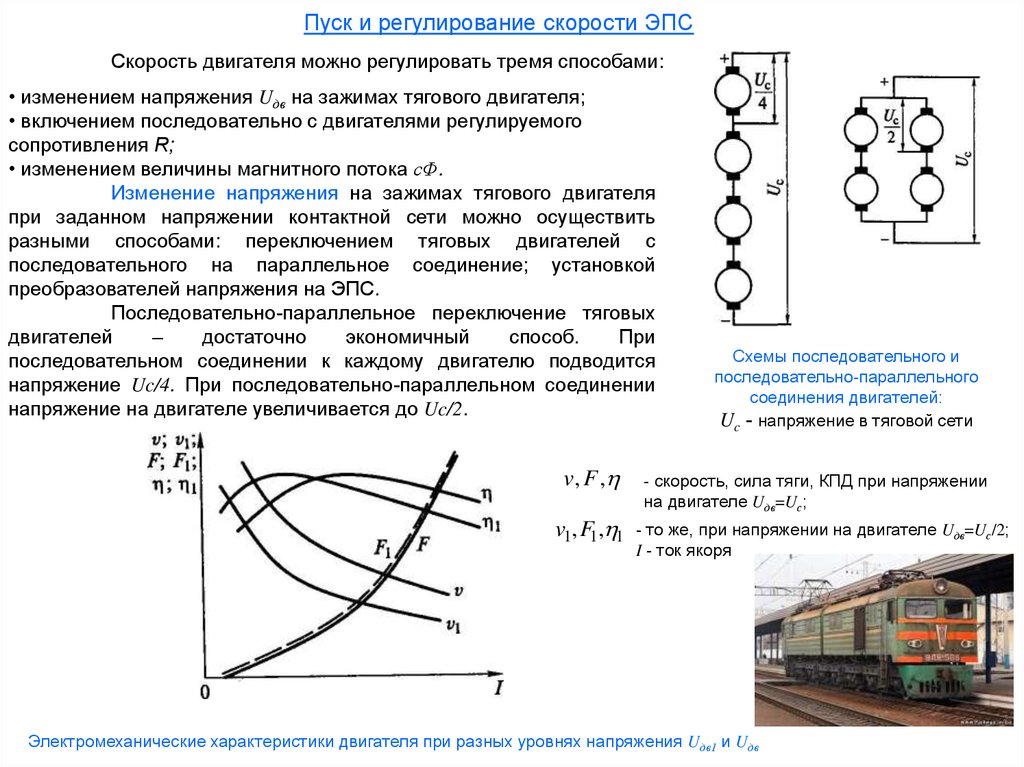
Пуск и регулирование скорости ЭПССкорость двигателя можно регулировать тремя способами:
• изменением напряжения Uдв на зажимах тягового двигателя;
• включением последовательно с двигателями регулируемого
сопротивления R;
• изменением величины магнитного потока сФ.
Изменение напряжения на зажимах тягового двигателя
при заданном напряжении контактной сети можно осуществить
разными способами: переключением тяговых двигателей с
последовательного на параллельное соединение; установкой
преобразователей напряжения на ЭПС.
Последовательно-параллельное переключение тяговых
двигателей
–
достаточно
экономичный
способ.
При
последовательном соединении к каждому двигателю подводится
напряжение Uc/4. При последовательно-параллельном соединении
напряжение на двигателе увеличивается до Uc/2.
v, F ,
v1, F1, 1
Схемы последовательного и
последовательно-параллельного
соединения двигателей:
Uc - напряжение в тяговой сети
- скорость, сила тяги, КПД при напряжении
на двигателе Uдв=Uс;
- то же, при напряжении на двигателе Uдв=Uс/2;
I - ток якоря
Электромеханические характеристики двигателя при разных уровнях напряжения Uдв1 и Uдв
20.
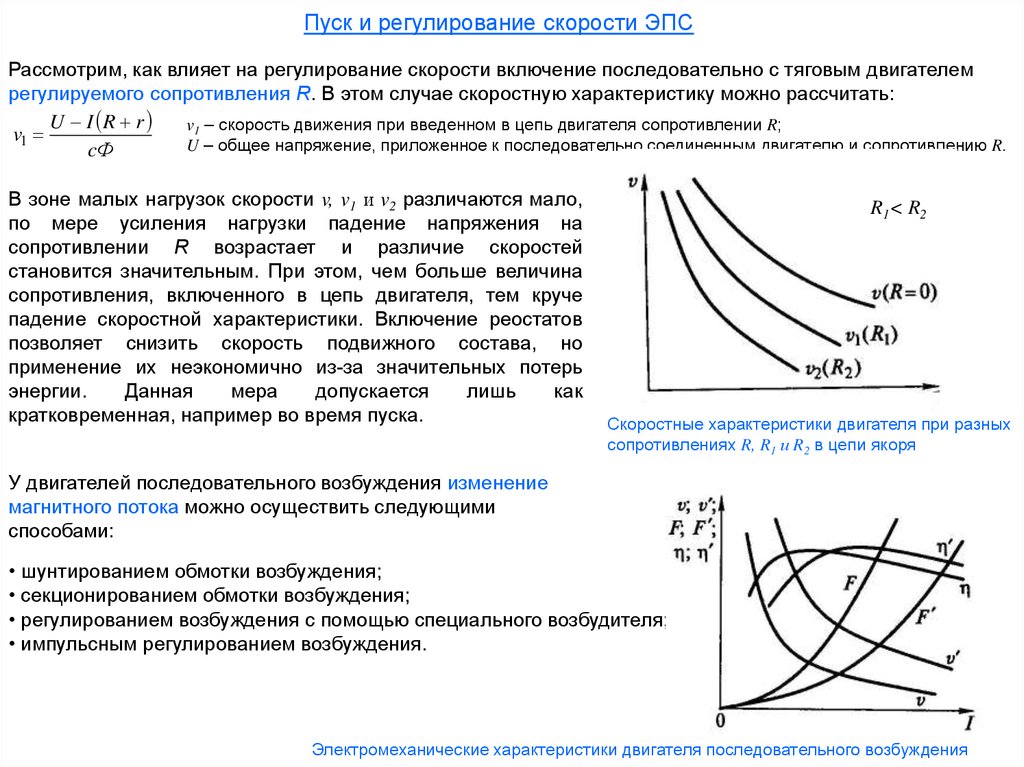
Пуск и регулирование скорости ЭПСРассмотрим, как влияет на регулирование скорости включение последовательно с тяговым двигателем
регулируемого сопротивления R. В этом случае скоростную характеристику можно рассчитать:
U I R r
v1 – скорость движения при введенном в цепь двигателя сопротивлении R;
v1
U – общее напряжение, приложенное к последовательно соединенным двигателю и сопротивлению R.
cФ
В зоне малых нагрузок скорости v, v1 и v2 различаются мало,
по мере усиления нагрузки падение напряжения на
сопротивлении R возрастает и различие скоростей
становится значительным. При этом, чем больше величина
сопротивления, включенного в цепь двигателя, тем круче
падение скоростной характеристики. Включение реостатов
позволяет снизить скорость подвижного состава, но
применение их неэкономично из-за значительных потерь
энергии.
Данная
мера
допускается
лишь
как
кратковременная, например во время пуска.
R1< R2
Скоростные характеристики двигателя при разных
сопротивлениях R, R1 и R2 в цепи якоря
У двигателей последовательного возбуждения изменение
магнитного потока можно осуществить следующими
способами:
• шунтированием обмотки возбуждения;
• секционированием обмотки возбуждения;
• регулированием возбуждения с помощью специального возбудителя;
• импульсным регулированием возбуждения.
Электромеханические характеристики двигателя последовательного возбуждения
21.
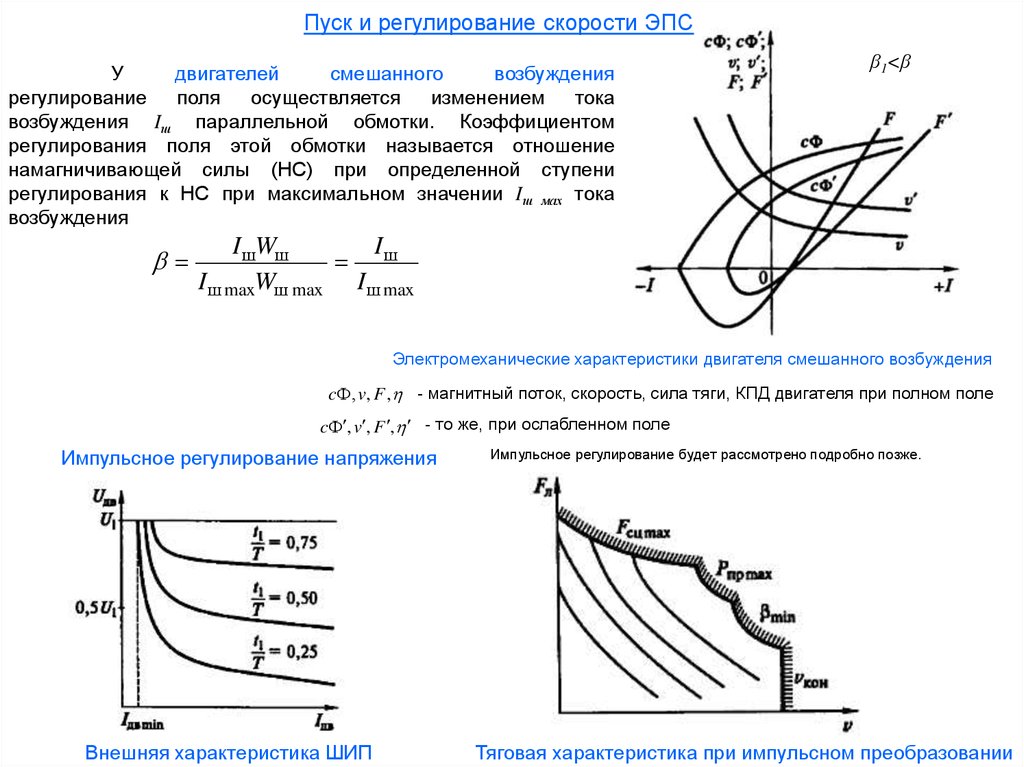
Пуск и регулирование скорости ЭПСУ
двигателей
смешанного
возбуждения
регулирование поля осуществляется изменением тока
возбуждения Iш параллельной обмотки. Коэффициентом
регулирования поля этой обмотки называется отношение
намагничивающей силы (НС) при определенной ступени
регулирования к НС при максимальном значении Iш мах тока
возбуждения
β1<β
I шWш
I
ш
I ш maxWш max I ш max
Электромеханические характеристики двигателя смешанного возбуждения
cФ, v, F , - магнитный поток, скорость, сила тяги, КПД двигателя при полном поле
cФ , v , F , - то же, при ослабленном поле
Импульсное регулирование напряжения
Внешняя характеристика ШИП
Импульсное регулирование будет рассмотрено подробно позже.
Тяговая характеристика при импульсном преобразовании
22.
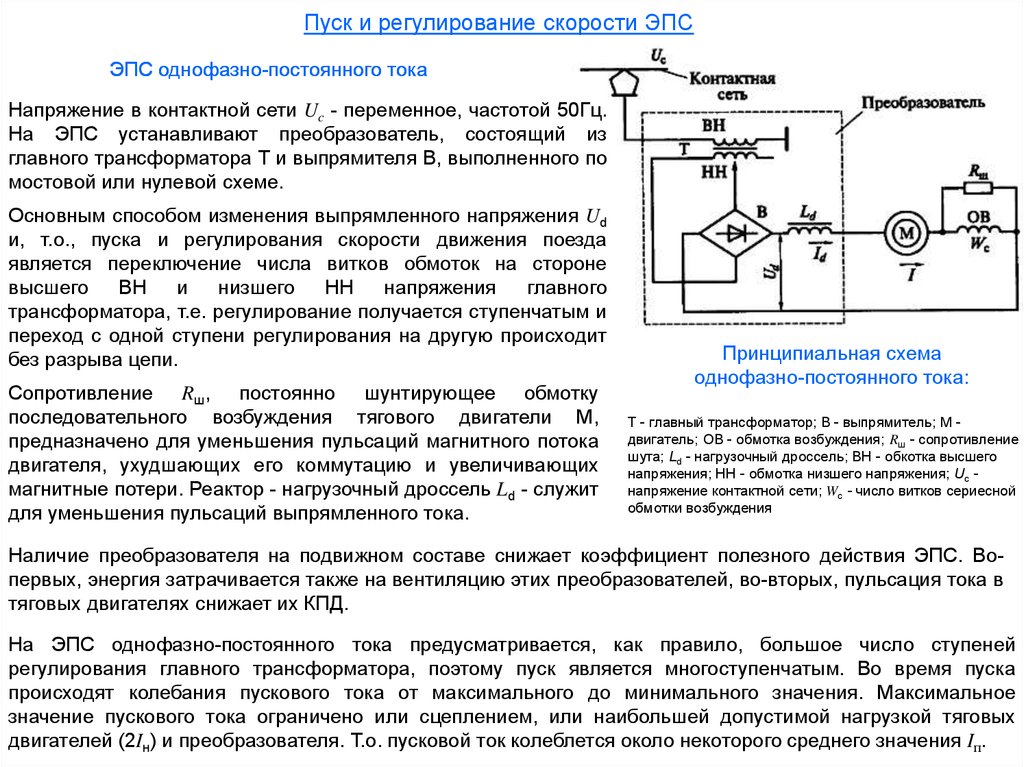
Пуск и регулирование скорости ЭПСЭПС однофазно-постоянного тока
Напряжение в контактной сети Uc - переменное, частотой 50Гц.
На ЭПС устанавливают преобразователь, состоящий из
главного трансформатора Т и выпрямителя В, выполненного по
мостовой или нулевой схеме.
Основным способом изменения выпрямленного напряжения Ud
и, т.о., пуска и регулирования скорости движения поезда
является переключение числа витков обмоток на стороне
высшего
ВН и
низшего
НН
напряжения
главного
трансформатора, т.е. регулирование получается ступенчатым и
переход с одной ступени регулирования на другую происходит
без разрыва цепи.
Сопротивление Rш, постоянно шунтирующее обмотку
последовательного возбуждения тягового двигатели М,
предназначено для уменьшения пульсаций магнитного потока
двигателя, ухудшающих его коммутацию и увеличивающих
магнитные потери. Реактор - нагрузочный дроссель Ld - служит
для уменьшения пульсаций выпрямленного тока.
Принципиальная схема
однофазно-постоянного тока:
Т - главный трансформатор; В - выпрямитель; М двигатель; ОВ - обмотка возбуждения; Rш - сопротивление
шута; Ld - нагрузочный дроссель; ВН - обкотка высшего
напряжения; НН - обмотка низшего напряжения; Uc напряжение контактной сети; Wc - число витков сериесной
обмотки возбуждения
Наличие преобразователя на подвижном составе снижает коэффициент полезного действия ЭПС. Вопервых, энергия затрачивается также на вентиляцию этих преобразователей, во-вторых, пульсация тока в
тяговых двигателях снижает их КПД.
На ЭПС однофазно-постоянного тока предусматривается, как правило, большое число ступеней
регулирования главного трансформатора, поэтому пуск является многоступенчатым. Во время пуска
происходят колебания пускового тока от максимального до минимального значения. Максимальное
значение пускового тока ограничено или сцеплением, или наибольшей допустимой нагрузкой тяговых
двигателей (2Iн) и преобразователя. Т.о. пусковой ток колеблется около некоторого среднего значения Iп.
23.
Пуск и регулирование скорости ЭПСЭПС однофазно-постоянного тока
При пуске напряжение, подводимое к
двигателю, меняется от минимального,
соответствующего пусковому току двигателя
при v=0, до полного напряжения в момент
включения
всей
вторичной
обмотки
трансформатора НН. При этом каждая
ступень является поездной, т.е. на ней поезд
может работать длительное время.
Электромеханические характеристики для
такого ЭПС будут определяться внешней
характеристикой
преобразователя
на
каждой ступени регулирования.
Внешняя характеристика преобразователя
Ud(Id)
определяется
в
основном
электромагнитными
процессами,
происходящими при выпрямлении тока, а
также падением напряжения в цепях
постоянного и переменного тока.
Электромеханические характеристики ЭПС однофазнопостоянного тока
Iп - пусковой ток; Iпmin, Iпmах – соответственно
минимальный и максимальный токи при пуске;
ПП, ОП1, ОП2 - характеристики соответственно при
полном поле и на двух ступенях ослабления поля;
vп - скорость пуска; vоп - скорость пуска на ступени ОП2
24.
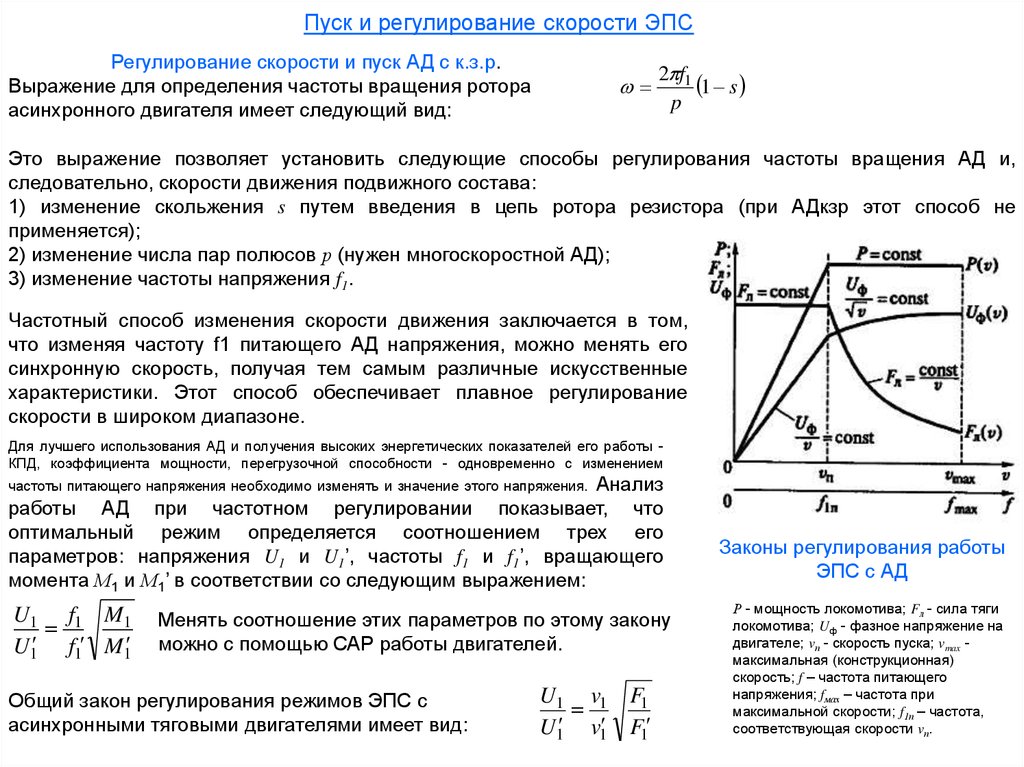
Пуск и регулирование скорости ЭПСРегулирование скорости и пуск АД с к.з.р.
Выражение для определения частоты вращения ротора
асинхронного двигателя имеет следующий вид:
2 f1
1 s
p
Это выражение позволяет установить следующие способы регулирования частоты вращения АД и,
следовательно, скорости движения подвижного состава:
1) изменение скольжения s путем введения в цепь ротора резистора (при АДкзр этот способ не
применяется);
2) изменение числа пар полюсов р (нужен многоскоростной АД);
3) изменение частоты напряжения f1.
Частотный способ изменения скорости движения заключается в том,
что изменяя частоту f1 питающего АД напряжения, можно менять его
синхронную скорость, получая тем самым различные искусственные
характеристики. Этот способ обеспечивает плавное регулирование
скорости в широком диапазоне.
Для лучшего использования АД и получения высоких энергетических показателей его работы КПД, коэффициента мощности, перегрузочной способности - одновременно с изменением
Анализ
работы АД при частотном регулировании показывает, что
оптимальный режим определяется соотношением трех его
параметров: напряжения U1 и U1’, частоты f1 и f1’, вращающего
момента М1 и М1’ в соответствии со следующим выражением:
частоты питающего напряжения необходимо изменять и значение этого напряжения.
U1 f1 M1
U1 f1 M1
Менять соотношение этих параметров по этому закону
можно с помощью САР работы двигателей.
Общий закон регулирования режимов ЭПС с
асинхронными тяговыми двигателями имеет вид:
U1 v1
U1 v1
F1
F1
Законы регулирования работы
ЭПС с АД
Р - мощность локомотива; Fл - сила тяги
локомотива; Uф - фазное напряжение на
двигателе; vп - скорость пуска; vmax максимальная (конструкционная)
скорость; f – частота питающего
напряжения; fмах – частота при
максимальной скорости; f1п – частота,
соответствующая скорости vп.
25.
Пуск и регулирование скорости ЭПСТяговый привод с вентильными двигателями состоит из электрической машины, вентильного
преобразователя и связывающей их системы управления. Вентильные машины по конструкции сходны с
синхронными машинами переменного тока, а по электромеханическим характеристикам аналогичны
машинам постоянного тока.
В режиме тяги система автоматического регулирования, изменяя напряжение, подводимое к
двигателю, угол опережения инверторной коммутации вентильного преобразователя и ток возбуждения,
позволяет получить любую характеристику Fл(v) в области ограничений по сцеплению, максимальной
скорости движения и мощности преобразователя.
Пуск и регулирование скорости автономного ЭПС
Автономным называется такой ЭПС, при котором сила тяги
создается тяговыми электрическими двигателями, а электрическая
энергия для питания тяговых двигателей поступает от энергетической
установки, расположенной непосредственно на подвижном составе. Такой
установкой на ЭПС могут служить электрохимическая аккумуляторная
батарея, механический аккумулятор, теплоэлектрическая установка,
батарея топливных элементов и т.д.
Тяговые характеристики при автономной электрической тяге определяются как видом источника
энергии, так и принятым способом передачи энергии от него к движущим осям поезда.
Автономный ЭПС в зависимости от применяемого источника энергии для движения можно
представить как теплоэлектрический и электроаккумуляторный. Для теплоэлектрического ЭПС характерна
ограниченная мощность источника энергии, а для электроаккумуляторного — ограниченный запас энергии.
Источником энергии для теплоэлектрического ЭПС является дизель, газовая турбина или
батарея топливных элементов. Необходимость возможно более полного использования установленной
мощности первичного источника приводит к тому, что возникает желание так регулировать силу тяги F и
скорость движения ЭПС v, чтобы постоянно сохранялась величина мощности, отдаваемой первичным
источником. Условию постоянства мощности первичного источника соответствует гиперболическая тяговая
const
характеристика ЭПС:
F
F const
или
26.
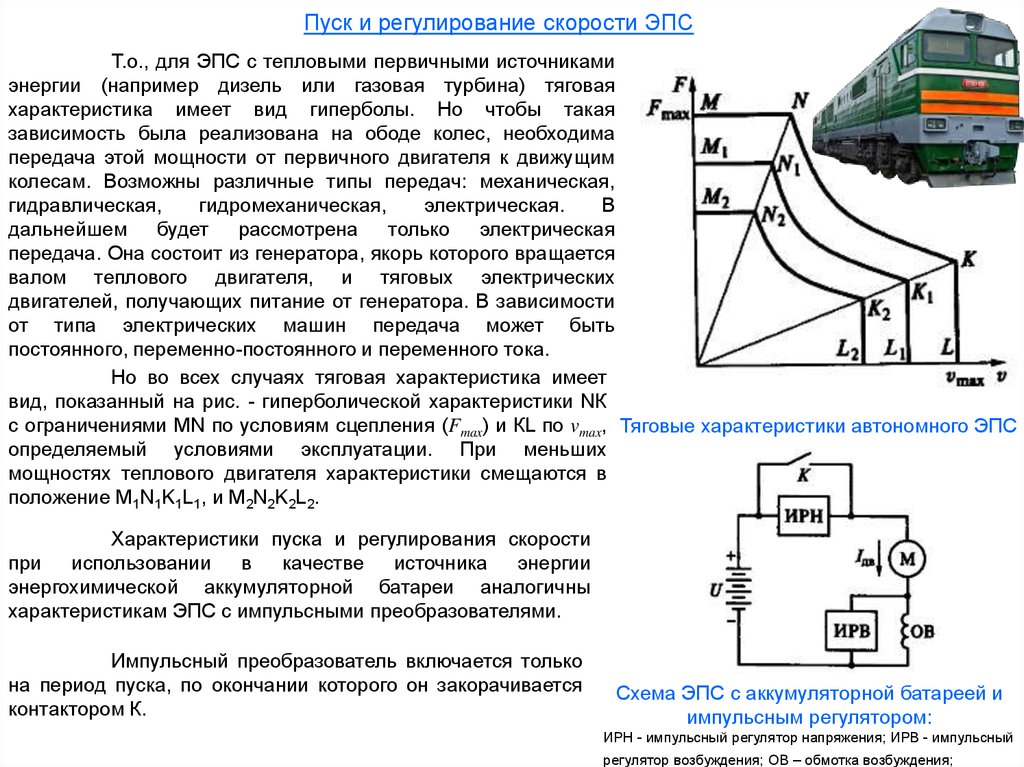
Пуск и регулирование скорости ЭПСТ.о., для ЭПС с тепловыми первичными источниками
энергии (например дизель или газовая турбина) тяговая
характеристика имеет вид гиперболы. Но чтобы такая
зависимость была реализована на ободе колес, необходима
передача этой мощности от первичного двигателя к движущим
колесам. Возможны различные типы передач: механическая,
гидравлическая,
гидромеханическая,
электрическая.
В
дальнейшем будет рассмотрена только электрическая
передача. Она состоит из генератора, якорь которого вращается
валом теплового двигателя, и тяговых электрических
двигателей, получающих питание от генератора. В зависимости
от типа электрических машин передача может быть
постоянного, переменно-постоянного и переменного тока.
Но во всех случаях тяговая характеристика имеет
вид, показанный на рис. - гиперболической характеристики NК
с ограничениями МN по условиям сцепления (Fmax) и КL по vmax, Тяговые характеристики автономного ЭПС
определяемый условиями эксплуатации. При меньших
мощностях теплового двигателя характеристики смещаются в
положение M1N1K1L1, и M2N2K2L2.
Характеристики пуска и регулирования скорости
при
использовании
в
качестве
источника энергии
энергохимической аккумуляторной батареи аналогичны
характеристикам ЭПС с импульсными преобразователями.
Импульсный преобразователь включается только
на период пуска, по окончании которого он закорачивается
контактором К.
Схема ЭПС с аккумуляторной батареей и
импульсным регулятором:
ИРН - импульсный регулятор напряжения; ИРВ - импульсный
регулятор возбуждения; ОВ – обмотка возбуждения;
27.
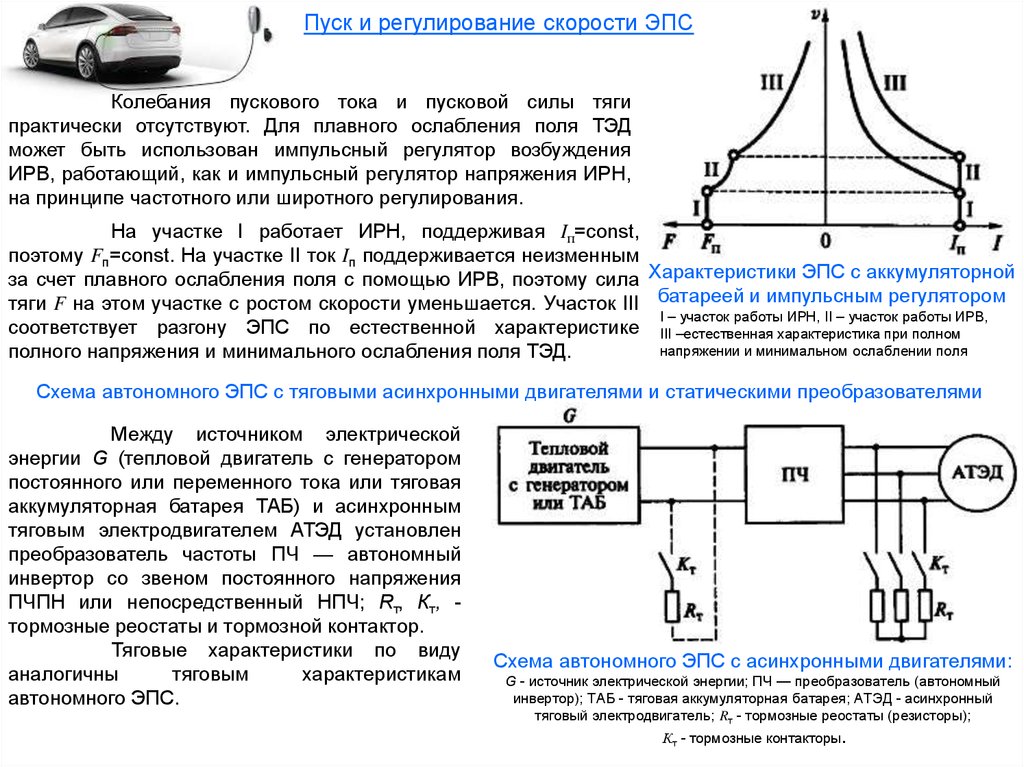
Пуск и регулирование скорости ЭПСКолебания пускового тока и пусковой силы тяги
практически отсутствуют. Для плавного ослабления поля ТЭД
может быть использован импульсный регулятор возбуждения
ИРВ, работающий, как и импульсный регулятор напряжения ИРН,
на принципе частотного или широтного регулирования.
На участке I работает ИРН, поддерживая Iп=соnst,
поэтому Fп=соnst. На участке II ток Iп поддерживается неизменным
за счет плавного ослабления поля с помощью ИРВ, поэтому сила Характеристики ЭПС с аккумуляторной
тяги F на этом участке с ростом скорости уменьшается. Участок III батареей и импульсным регулятором
I – участок работы ИРН, II – участок работы ИРВ,
соответствует разгону ЭПС по естественной характеристике III –естественная характеристика при полном
напряжении и минимальном ослаблении поля
полного напряжения и минимального ослабления поля ТЭД.
Схема автономного ЭПС с тяговыми асинхронными двигателями и статическими преобразователями
Между источником электрической
энергии G (тепловой двигатель с генератором
постоянного или переменного тока или тяговая
аккумуляторная батарея ТАБ) и асинхронным
тяговым электродвигателем АТЭД установлен
преобразователь частоты ПЧ — автономный
инвертор со звеном постоянного напряжения
ПЧПН или непосредственный НПЧ; Rт, Кт, тормозные реостаты и тормозной контактор.
Тяговые характеристики по виду
аналогичны
тяговым
характеристикам
автономного ЭПС.
Схема автономного ЭПС с асинхронными двигателями:
G - источник электрической энергии; ПЧ — преобразователь (автономный
инвертор); ТАБ - тяговая аккумуляторная батарея; АТЭД - асинхронный
тяговый электродвигатель; Rт - тормозные реостаты (резисторы);
Кт - тормозные контакторы.
28.
Пуск и регулирование скорости ЭПСПуск ЭПС
В момент трогания подвижного состава, когда v=0, ЭДС тяговых двигателей Е=сФω также равна нулю.
Если двигатель включить на номинальное напряжение, то его ток будет равен току короткого замыкания
Iкз=Uном/R.
Такой ток может привести к нежелательным явлениям:
нарушение коммутации тяговых двигателей;
создание больших механических нагрузок в передаче;
возникновение боксования.
Для предотвращения данных явлений и ограничения пускового тока необходимо либо
прикладывать к двигателю пониженное напряжение, либо последовательно с тяговыми двигателями
включать регулируемые пусковые реостаты. Постепенно регулируя величину ступени реостата от
скорости, равной нулю, до скорости окончания пуска vп, осуществляют реостатный пуск, в этот период ЭДС
двигателей возрастает с увеличением скорости и при скорости vп возможен переход при данном пусковом
токе Iп на характеристики двигателя при выключенных реостатах.
При движении поезда желательно осуществлять его пуск с максимальным током Iпмах - в этом случае
увеличиваются пусковая сила тяги и пусковое ускорение, повышается средняя скорость движения и
уменьшаются потери в пусковых реостатах. Но, несмотря на эти преимущества, нельзя выбирать пусковой
ток произвольно большим. Его величина ограничивается условиями сцепления и мощностью тяговых
двигателей. Желательно поддерживать пусковой ток постоянным. Этому соответствуют практически
неизменная пусковая сила тяги Fп и постоянное ускорение ап.
29.
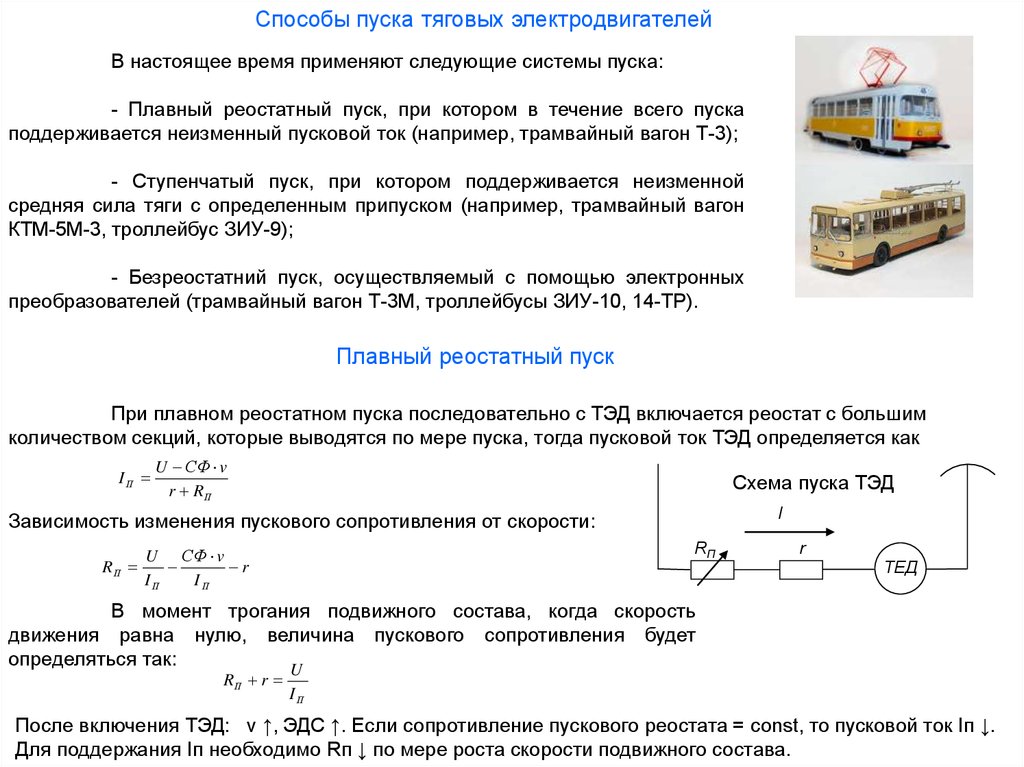
Способы пуска тяговых электродвигателейВ настоящее время применяют следующие системы пуска:
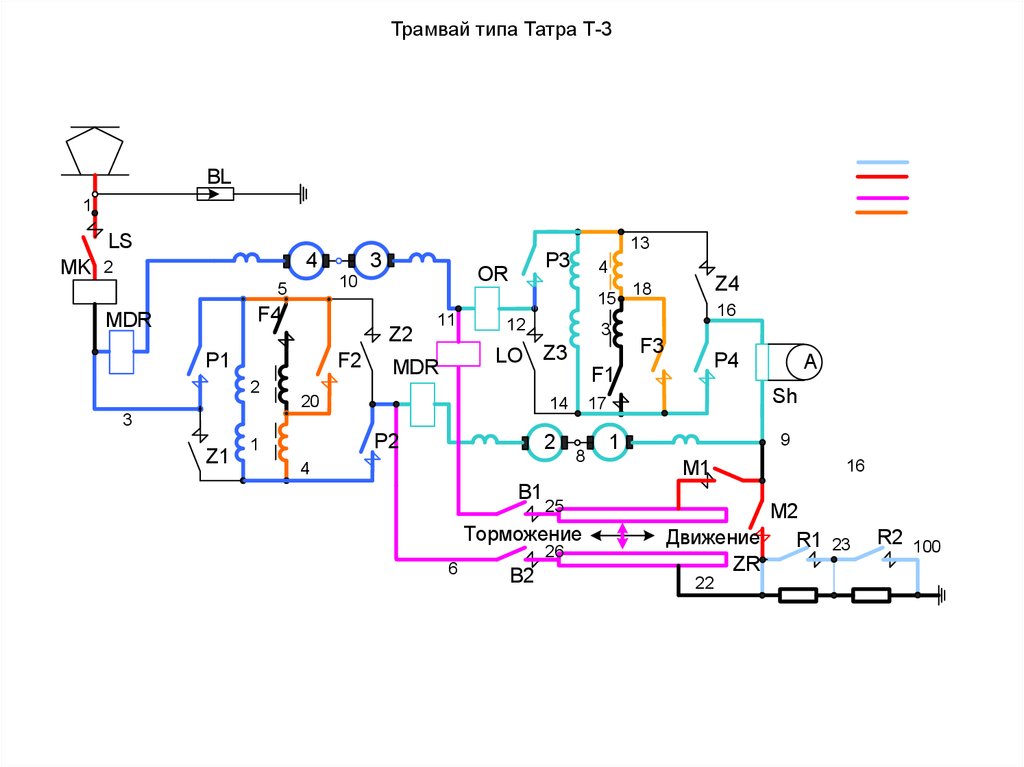
- Плавный реостатный пуск, при котором в течение всего пуска
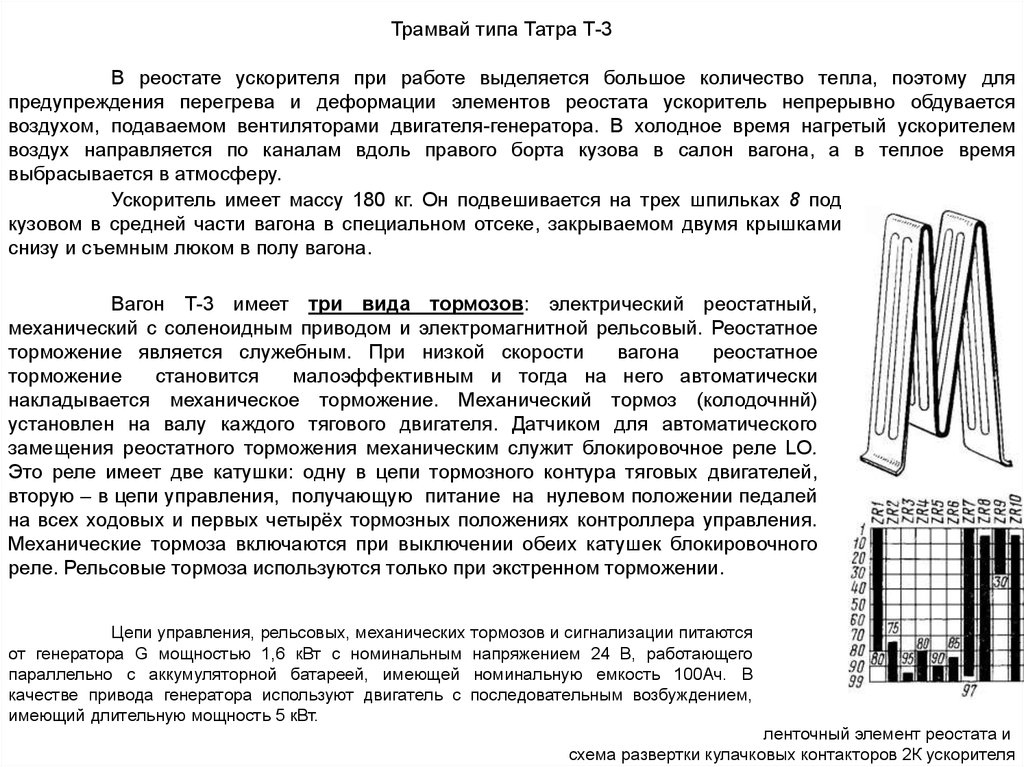
поддерживается неизменный пусковой ток (например, трамвайный вагон Т-3);
- Ступенчатый пуск, при котором поддерживается неизменной
средняя сила тяги с определенным припуском (например, трамвайный вагон
КТМ-5М-3, троллейбус ЗИУ-9);
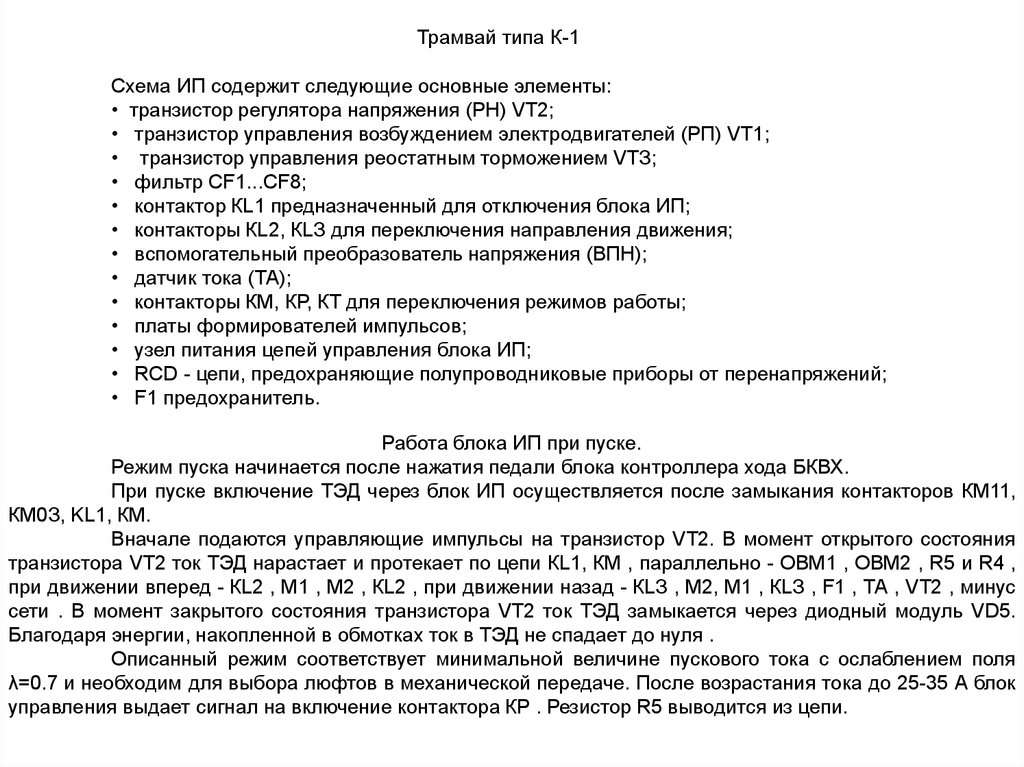
- Безреостатний пуск, осуществляемый с помощью электронных
преобразователей (трамвайный вагон Т-3М, троллейбусы ЗИУ-10, 14-ТР).
Плавный реостатный пуск
При плавном реостатном пуска последовательно с ТЭД включается реостат с большим
количеством секций, которые выводятся по мере пуска, тогда пусковой ток ТЭД определяется как
IП
U СФ v
r RП
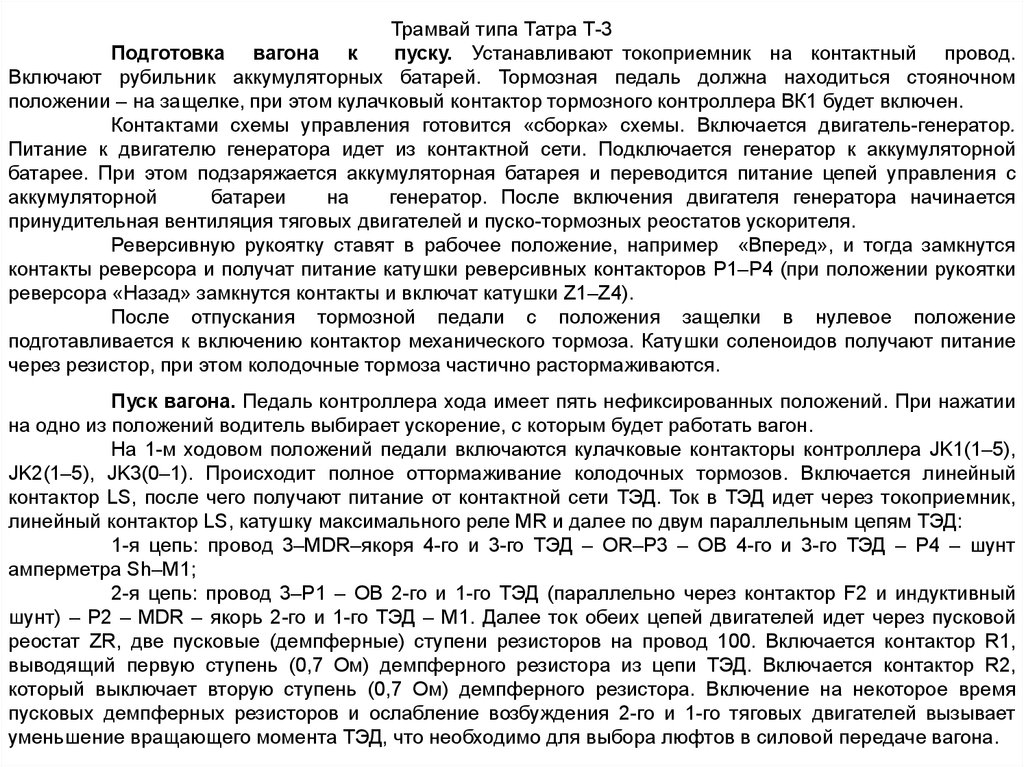
Схема пуска ТЭД
I
Зависимость изменения пускового сопротивления от скорости:
RП
RП
U СФ v
r
IП
IП
r
ТЕД
В момент трогания подвижного состава, когда скорость
движения равна нулю, величина пускового сопротивления будет
определяться так:
U
RП r
IП
После включения ТЭД: v ↑, ЭДС ↑. Если сопротивление пускового реостата = const, то пусковой ток Iп ↓.
Для поддержания Iп необходимо Rп ↓ по мере роста скорости подвижного состава.
30.
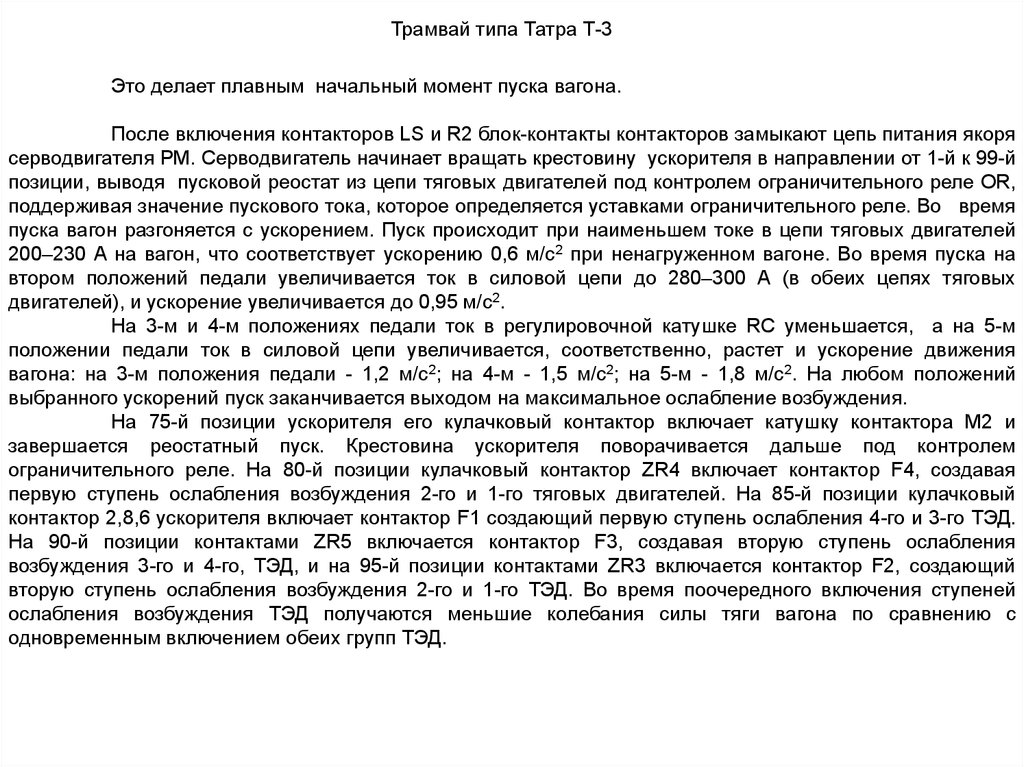
Закон изменения Rп можно получить, если принять I = Iп = const и Ф = Фп = const,v
RП r
b
UД
U
А
IП
RП r А В v
СФ
В
ІП
Зависимость Rп = f (v) является линейной. Точка а
соответствует моменту сдвига подвижного состава,
когда v = 0 и
U
c
ІП
RП r
Д
ІП
IП
a
RП
r
I
Точка b соответствует условиям, когда
пусковой реостат полностью выведен,
RП 0
RП r r
v=vп .
Точка с соответствует моменту выхода на автоматическую характеристику.
Плавная регулировка сопротивления пускового реостата обеспечивают системы пуска с
клавишными или коллекторными контроллерами, (например трамвайные вагоны «Татра»).
Плавные системы пуска достаточно сложные, т.к. регулирование пускового реостата связано с
усложнением системы управления. Для выбора люфтов в передаче в таких системах пуска используется
способ перевода части ТЭД на ослабленное поле, уменьшая начальный момент. Для плавного нарастания
пускового тока дополнительно используются демпфирующие сопротивления. Конструкция ускорителя для
плавного пуска также сложная, так как содержит большое количество пусковых реостатов и элементов их
крепления.
31.
Плавный реостатный пуск32.
Ступенчатой реостатный пускРеостат разделяют на отдельные секции, количество которых значительно меньше чем при плавном
реостатном пуске. Отпайки от каждой секции присоединят к контактам силового контроллера или к
контактам реостатного контроллера. По мере разгона подвижного состава отдельные секции пускового
реостата закорачиваются. При таком пуска уже невозможно поддерживать постоянным пусковой ток, силу
тяги и ускорения.
В случае ступенчатого пуска пытаются ограничить колебания пускового тока.
Поэтому чтобы обеспечить плавность пуска необходимо большее количество ступеней
пускового реостата, а это ведет к усложнению схемы управления.
Значения расчетного пускового тока должна быть меньше наибольшего допустимого тока с
коммутацией IКОМ и пусковой режим ограничен по сцеплением, т.е.
I П мах І ком (1,8 2) І я
где G0сц – нагрузка на ось, кН
FП мах 1000 G0 сц
По электромеханическими характеристиками по значению Fпмах находят наибольшее
допустимое значение пускового тока по сцеплению Iсц мах.
Максимальным значением пускового тока IПмах принимают наименьшее из следующих
параметров: Iсц мах или Iком .
При эксплуатации подвижного состава возможны изменения значения пускового тока в больших
пределах за счет изменения напряжения в контактной сети или за счет быстрого вывода пусковых
сопротивлений при неавтоматическом пуске.
При ступенчатом пуске пусковые диаграммы имеют две стадии: начальную, в процессе которой
ускорение нарастает, и следующую, в которой пуск происходит при среднем постоянном ускорении.
Значение ускорения выбирают для пуска нормально нагруженного подвижного состава на
горизонтальной площадке с учетом ограничений по допустимым нагрузкам для двигателей или по
условиям сцепления.
33.
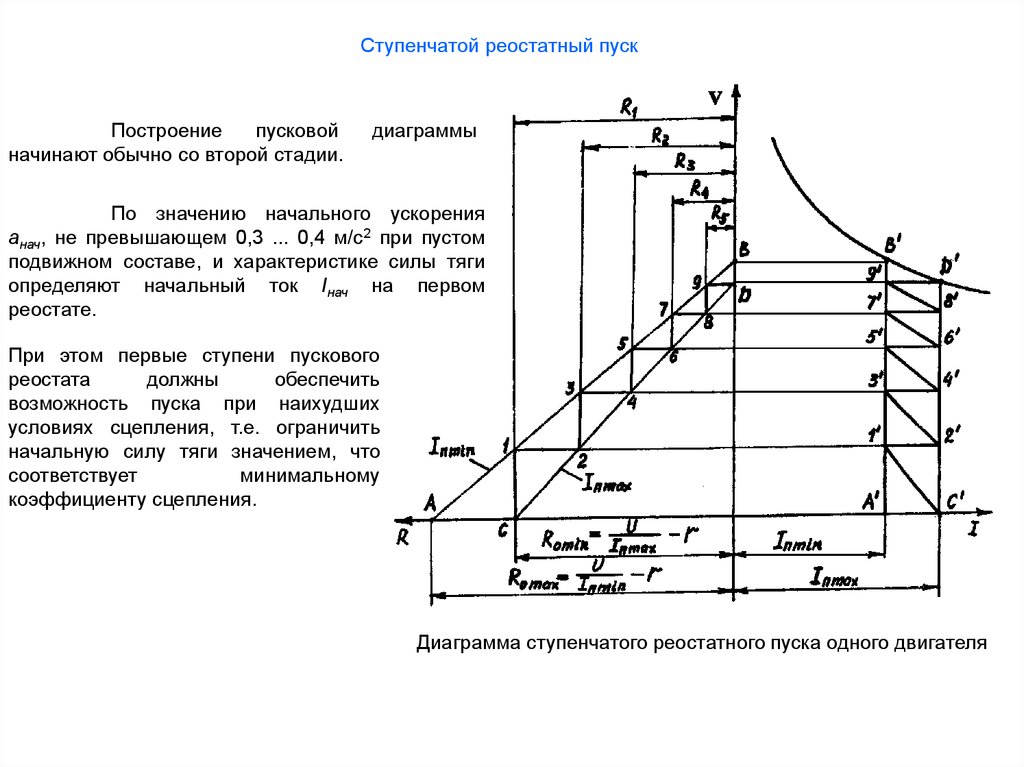
Ступенчатой реостатный пускПостроение
пусковой
начинают обычно со второй стадии.
диаграммы
По значению начального ускорения
анач, не превышающем 0,3 ... 0,4 м/с2 при пустом
подвижном составе, и характеристике силы тяги
определяют начальный ток Iнач на первом
реостате.
При этом первые ступени пускового
реостата
должны
обеспечить
возможность пуска при наихудших
условиях сцепления, т.е. ограничить
начальную силу тяги значением, что
соответствует
минимальному
коэффициенту сцепления.
Диаграмма ступенчатого реостатного пуска одного двигателя
34.
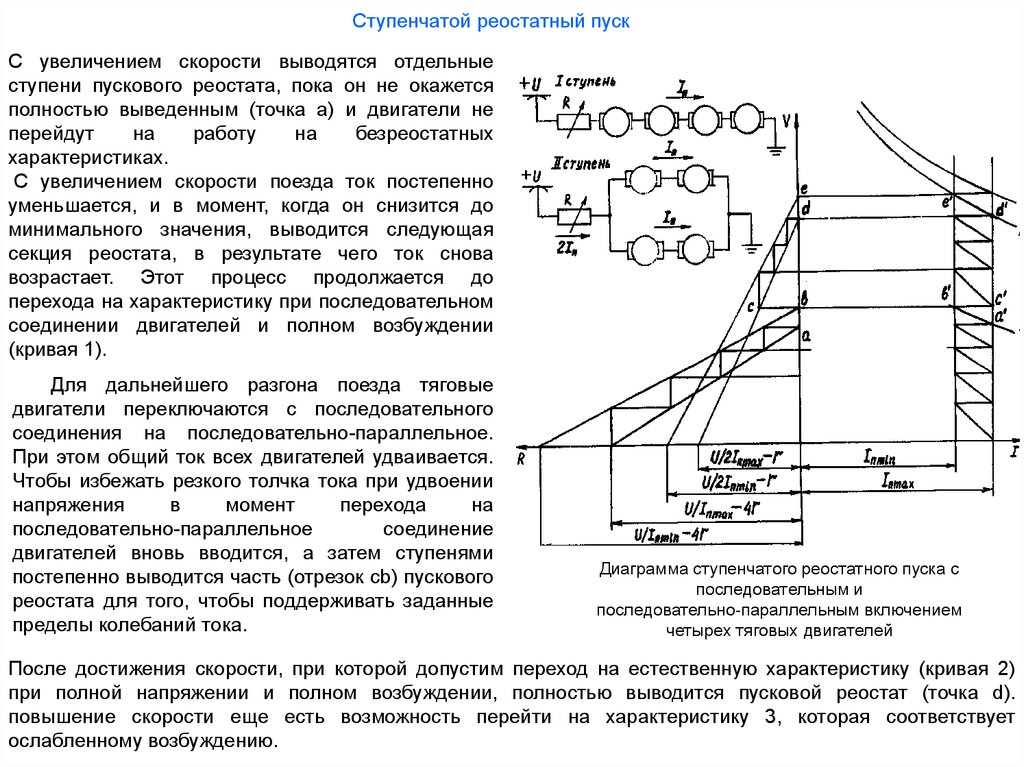
Ступенчатой реостатный пускС увеличением скорости выводятся отдельные
ступени пускового реостата, пока он не окажется
полностью выведенным (точка а) и двигатели не
перейдут
на
работу
на
безреостатных
характеристиках.
С увеличением скорости поезда ток постепенно
уменьшается, и в момент, когда он снизится до
минимального значения, выводится следующая
секция реостата, в результате чего ток снова
возрастает. Этот процесс продолжается до
перехода на характеристику при последовательном
соединении двигателей и полном возбуждении
(кривая 1).
Для дальнейшего разгона поезда тяговые
двигатели переключаются с последовательного
соединения на последовательно-параллельное.
При этом общий ток всех двигателей удваивается.
Чтобы избежать резкого толчка тока при удвоении
напряжения
в
момент
перехода
на
последовательно-параллельное
соединение
двигателей вновь вводится, а затем ступенями
постепенно выводится часть (отрезок cb) пускового
реостата для того, чтобы поддерживать заданные
пределы колебаний тока.
Диаграмма ступенчатого реостатного пуска с
последовательным и
последовательно-параллельным включением
четырех тяговых двигателей
После достижения скорости, при которой допустим переход на естественную характеристику (кривая 2)
при полной напряжении и полном возбуждении, полностью выводится пусковой реостат (точка d).
повышение скорости еще есть возможность перейти на характеристику 3, которая соответствует
ослабленному возбуждению.
35.
Если на ступенях ослабленного возбуждения поддерживать такие же колебания тока, как и приполном, то при ослабленном возбуждении уменьшится средняя сила тяги, а следовательно, и среднее
ускорение. Сохранить одинаковую силу тяги на всех ступенях пуска можно, увеличив ток на ступенях
ослабленного возбуждения. Поэтому в тех случаях, когда максимальная пусковая сила тяги ограничена не
самой допустимой нагрузкой двигателя, а сцеплением, целесообразно увеличивать пусковые токи на
ступенях ослабленного возбуждения.
В случае больших ускорений, которые применяются для моторвагонной тяги, за время
электрического переходного процесса, происходящего после вывода степени пускового реостата, скорость
поезда успевает немного увеличиться. Это смягчает толчки тока в моменты перехода с одной ступени на
другую, особенно на ступенях регулирования возбуждения, при которых вследствие большой
индуктивности обмоток возбуждения значительно замедляются переходные процессы.
Безреостатный пуск с помощью импульсных преобразователей
Реостатный пуск тяговых двигателей с контакторно-реостатной системой управления имеет
существенные недостатки: значительные потери энергии, переключения групп тяговых двигателей,
необходимость использования большого числа силовых контактов, разрывающие большие токи (а
следовательно, и специальных аппаратов, таких, как реостатный контроллер, контакторы для перегруппировки тяговых двигателей, линейные
Наличие большого числа контактных элементов снижает надежность.
Большинство из этих недостатков устраняется при импульсном управлении, что обеспечивает
возможность плавного безреостатного регулирования в широких пределах напряжения, которое
подводится к тяговых двигателям. При этом упрощается управление скоростью подвижного состава,
упрощается автоматизация процессов движения поезда, улучшаются условия использования
рекуперативного торможения.
контакторы).
Принцип регулирования: ток поступает в цепь двигателя отдельными импульсами.
Непрерывный ток ТЭД и контактной сети формируется с помощью реакторов и конденсаторов. Изменяя
соотношение между длительностью импульса и временем паузы, можно изменять среднее напряжение на
двигателях и тем самым регулировать их скорость, осуществлять плавный безреостатний пуск и
электрическое торможение в широком диапазоне скоростей. Периодическое отключение и подключение
контура нагрузки к источнику энергии обеспечивается тиристорным или транзисторным ключом.
36.
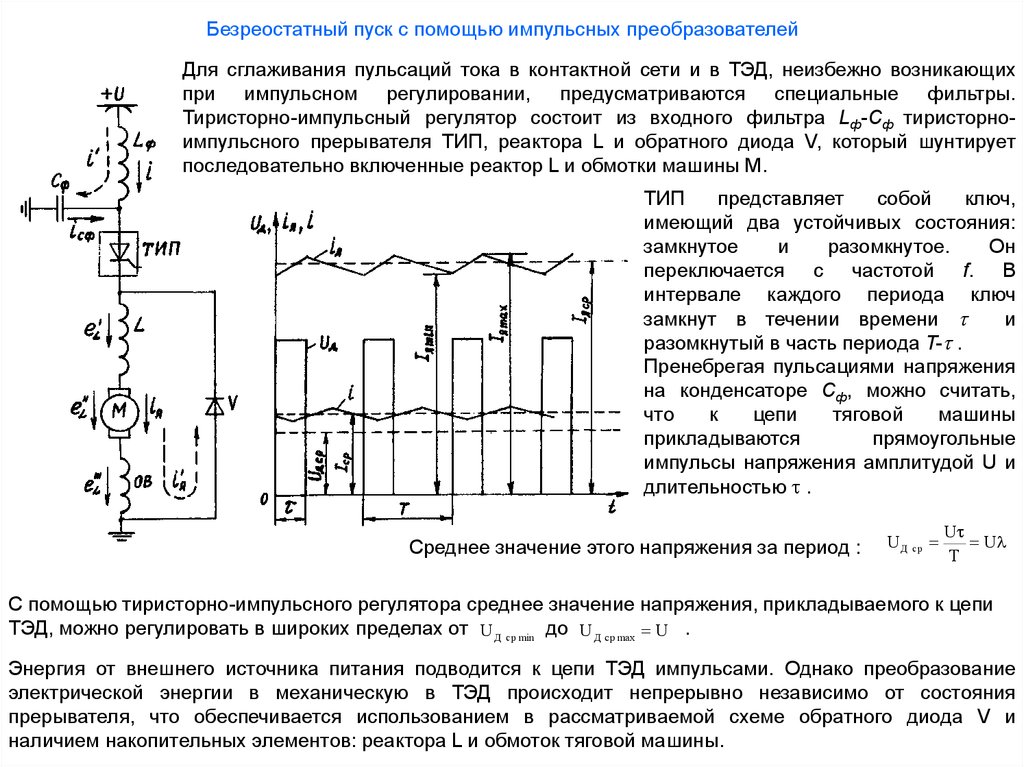
Безреостатный пуск с помощью импульсных преобразователейДля сглаживания пульсаций тока в контактной сети и в ТЭД, неизбежно возникающих
при импульсном регулировании, предусматриваются специальные фильтры.
Тиристорно-импульсный регулятор состоит из входного фильтра Lф-Сф тиристорноимпульсного прерывателя ТИП, реактора L и обратного диода V, который шунтирует
последовательно включенные реактор L и обмотки машины М.
ТИП
представляет
собой
ключ,
имеющий два устойчивых состояния:
замкнутое
и
разомкнутое.
Он
переключается с частотой f. В
интервале каждого периода ключ
замкнут в течении времени
и
разомкнутый в часть периода T- .
Пренебрегая пульсациями напряжения
на конденсаторе Сф, можно считать,
что
к
цепи
тяговой
машины
прикладываются
прямоугольные
импульсы напряжения амплитудой U и
длительностью .
Среднее значение этого напряжения за период :
U Д ср
U
U
T
С помощью тиристорно-импульсного регулятора среднее значение напряжения, прикладываемого к цепи
ТЭД, можно регулировать в широких пределах от U Д ср min до U Д ср max U .
Энергия от внешнего источника питания подводится к цепи ТЭД импульсами. Однако преобразование
электрической энергии в механическую в ТЭД происходит непрерывно независимо от состояния
прерывателя, что обеспечивается использованием в рассматриваемой схеме обратного диода V и
наличием накопительных элементов: реактора L и обмоток тяговой машины.
37.
Безреостатный пуск с помощью импульсных преобразователейЗа время энергия, поступающая от внешнего источника напряжения U, потребляется тяговой
машиной полностью, частично запасаясь в накопительных элементах для последующего использования
тяговой машиной в интервале периода T- , когда поступление энергии от внешнего источника питания
отсутствует. Вследствие этого тяговая машина получает питание непрерывно: в интервале - от внешнего
источника напряжения U, а часть периода 1- --- благодаря энергии, запасенной в накопительных
элементах. Поэтому, несмотря на импульсный характер питания тяговой машины от внешнего источника
питания, ток в ее цепи будет непрерывным. Одну часть периода ток нарастает, а другую уменьшается,
замыкаясь под действием ЭДС.
Т. о., при размыкании импульсного регулятора ток в цепи тяговой машины не разрывается, а
происходит изменение контура для его замыкания. Это исключает появление перенапряжений на
регуляторе, несмотря на то, что обмотки тяговой машины и реактор имеют большую индуктивность.
При случайном обрыве контура обратной диода V работа рассматриваемой системы
импульсного регулирования напряжения становится невозможной, так как будет отсутствовать контур для
замыкания тока i‘я в интервале 1- периода, а энергия, запасенная в накопительных элементах, не сможет
быть преобразована в полезную работу, что вызовет недопустимое перенапряжение на прерывателе и
приведет к выходу его из строя.
При работе импульсного прерывателя нельзя допускать также прерывания тока в контактной
сети, которая имеет существенную индуктивность. Непрерывность тока в контактной сети при импульсном
характере нагрузки обеспечивается Г-образным фильтром Lф-Сф. Независимо от состояния прерывателя
ток в контактной сети имеет контур для замыкания: по цепи тягового двигателя (i) или по цепи фильтрового
конденсатора (i') . В интервале периода 1- , несмотря на то, что тяговая машина отключена от контактной
сети, происходит потребление электрической энергии от источника питания, которая не тратится, а
запасается в конденсаторе. В интервале периода в цепь тяговой машины поступает энергия как от
источника питания, так и от конденсатора, которая без учета потерь в элементах схемы равна энергии,
поступившей от источника за весь период. Т. о., благодаря накоплению энергии в конденсаторе Сф в
интервале периода 1- обеспечивается непрерывность тока в контактной сети.
При правильном выборе параметров фильтра Lф и Сф максимальные пульсации тока
ограничивают на уровне 1 ... 2% от тока Iср, т.е. в любой момент времени мгновенное значение тока в
контактной сети незначительно отличается от среднего. Вся энергия, потребляемая от источника питания
за исключением потерь в элементах схемы, используется тяговой машиной.
38.
Импульсный регулятор можно считать трансформатором напряжения в цепях постоянного токас регулируемым коэффициентом трансформации.
Систему импульсного управления, при которой частота импульсов, а следовательно, и
продолжительность периода неизменны, а меняется длительность импульса , называют широтноимпульсной, так как регулируется ширина импульса. Если же длительность импульса сохраняется
постоянной, для регулирования напряжения надо менять время Т, то есть частоту следования импульсов.
Такая система получила название частотно-импульсной. Возможны, хотя и нашли меньшее
распространение, комбинированные импульсные системы, в которых изменяется как Т, так и .
Применение импульсного регулятора напряжения позволяет изменять напряжение на тяговой
машине в широком диапазоне, что позволяет отказаться от необходимости переключения тяговых машин с
последовательного на последовательно-параллельное соединение и применять наиболее рациональную
схему включения тяговых машин без перегруппировок в процессе пуска. Схема соединения тяговых машин
влияет на массо-габаритные показатели импульсного регулятора и тягово-энергетические показатели
вагона.
Последовательное соединение
Тяговые машины объединены в одну группу, что, с одной стороны, обусловливает минимальное
число и массу коммутационных аппаратов, а с другой - максимальные массо-габаритные показатели
фильтрового конденсатора преобразователя, так как частота изменения напряжения на конденсаторе
фильтра минимальная и равна частоте пульсаций тока в цепи тяговых машин. При рассматриваемой
схеме соединения ТЭД имеют повышенную склонность к буксовке, так как при потере сцепления с рельсом
одной колесной пары напряжение на тяговой машине, связанной с этой колесный парой, растет, что и
вызывает разносное буксование. Следует отметить, что с помощью импульсного регулятора V1 на каждой
машине в тяговом режиме напряжение плавная изменяется в пределах:
U Д min U Д
U
4
На напряжение U/4 и должны в этом случае проектировать тяговую машину.
39.
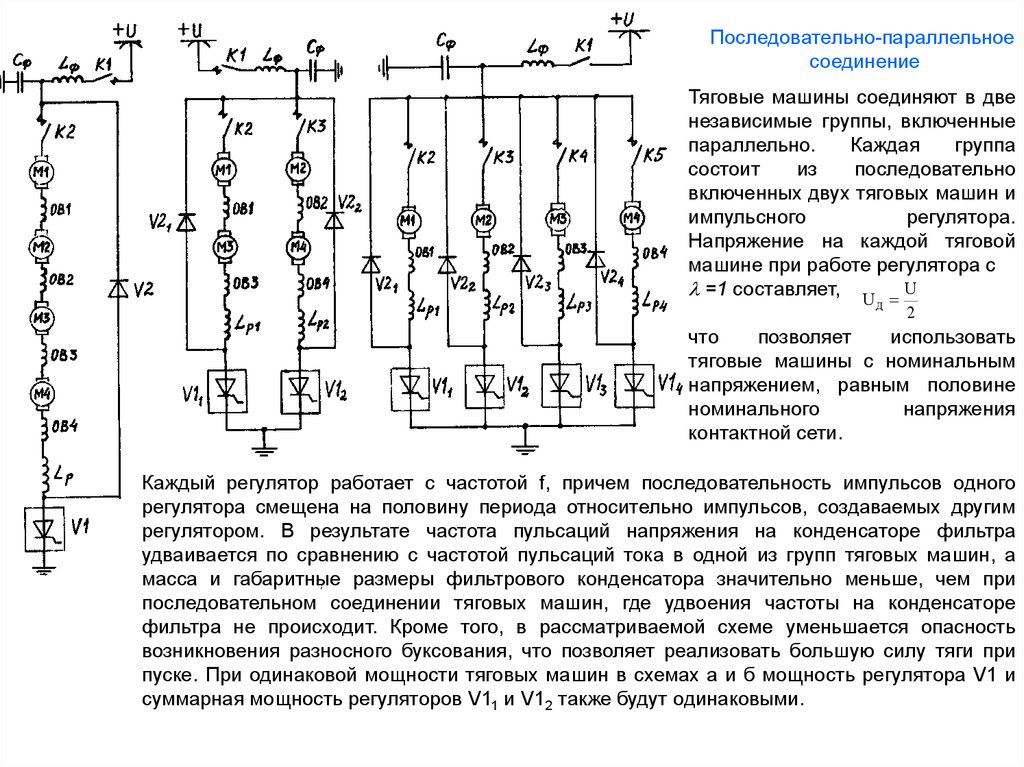
Последовательно-параллельноесоединение
Тяговые машины соединяют в две
независимые группы, включенные
параллельно.
Каждая
группа
состоит
из
последовательно
включенных двух тяговых машин и
импульсного
регулятора.
Напряжение на каждой тяговой
машине при работе регулятора с
=1 составляет, U U
Д
2
что
позволяет
использовать
тяговые машины с номинальным
напряжением, равным половине
номинального
напряжения
контактной сети.
Каждый регулятор работает с частотой f, причем последовательность импульсов одного
регулятора смещена на половину периода относительно импульсов, создаваемых другим
регулятором. В результате частота пульсаций напряжения на конденсаторе фильтра
удваивается по сравнению с частотой пульсаций тока в одной из групп тяговых машин, а
масса и габаритные размеры фильтрового конденсатора значительно меньше, чем при
последовательном соединении тяговых машин, где удвоения частоты на конденсаторе
фильтра не происходит. Кроме того, в рассматриваемой схеме уменьшается опасность
возникновения разносного буксования, что позволяет реализовать большую силу тяги при
пуске. При одинаковой мощности тяговых машин в схемах а и б мощность регулятора V1 и
суммарная мощность регуляторов V11 и V12 также будут одинаковыми.
40.
Параллельное соединениеВ этом случае образуются четыре независимые группы, в каждой из которых тяговая машина
через преобразователь подключена к контактной сети. При работе преобразователя с =1 к тяговой
машины будет приложено напряжение контактной сети Uд=U. Нужна тяговая машина с номинальным
напряжением, равным номинальному напряжению контактной сети (в режиме тяги). Но, такая машина
имеет значительно большие массо-габаритные показатели, чем тяговая машина с Uд=U/2 и ее применение
для вагона метрополитена нерационально. Напряжение на тяговой машине можно уменьшить, изменив
режим работы импульсных регуляторов путем ограничения коэффициента максимального заполнения
временного интервала на уровне max=0,4…0,6, что позволит использовать тяговые машины с Uд=U/2 .
Рассматриваемой схеме присущи следующие недостатки по сравнению со схемами а и б:
- значительное увеличение индуктивности, а, соответственно, и массы реакторов для
ограничения пульсаций тока в цепи тяговой машины на допустимом уровне,
- увеличение числа коммутационных аппаратов и обратных диодов V2;
- импульсные регуляторы должны иметь больший диапазон регулирования, так как активное
сопротивление цепи тяговой машины минимально.
Кроме того, практически вдвое возрастает масса импульсных регуляторов. Их число при
параллельном соединении ТЭД в 2 раза больше, чем при последовательно-параллельном, а масса
каждого преобразователя в обоих случаях примерно одинакова, так как элементы преобразователей
рассчитывают на одинаковые максимальные напряжения и токи. Кроме того, увеличение индуктивности
реакторов и числа импульсных регуляторов обуславливает значительное увеличение потерь энергии в
этих элементах при параллельном соединении тяговых машин. Сравнение показателей массы силового
электрооборудования вагонов с импульсными регуляторами показывает, что наиболее рациональным
является применение схемы с последовательно-параллельным соединением тяговых машин.
41.
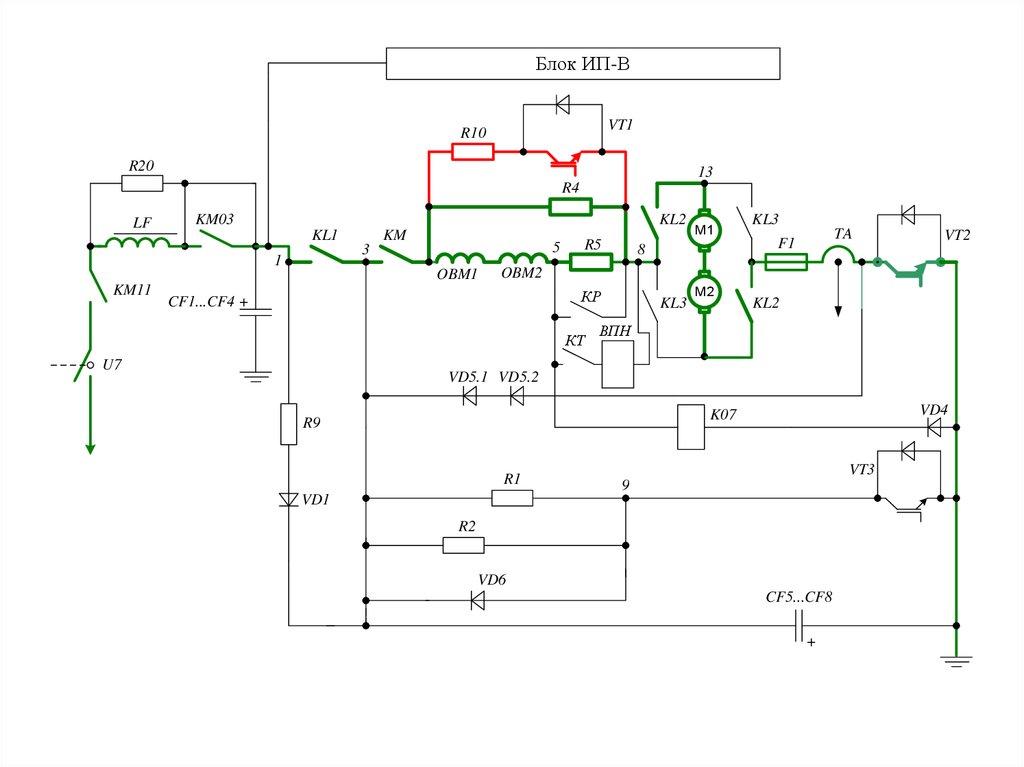
Независимо от системы импульсных преобразователей различают два способа их применения.В первом из них преобразователь включают только в периоды пуска и электрического
торможения. После достижения напряжения на двигателях, равном или близком к номинальному,
импульсный преобразователь шунтируется контактором и двигатели присоединяются к сети. Такая система
возможна лишь в том случае, если тяговый двигатель или группа последовательно соединенных
двигателей рассчитаны на работу при напряжении контактной сети.
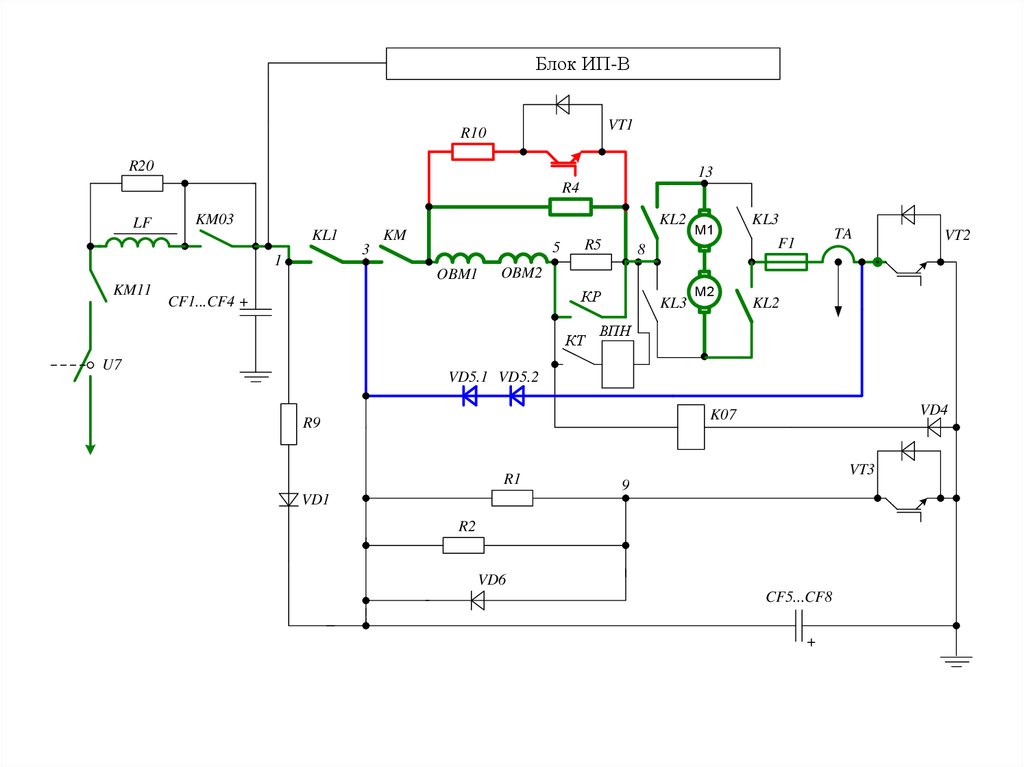
При втором способе импульсные преобразователи остаются включенными в течение всего
времени работы тяговых двигателей, при этом номинальное напряжение цепи двигателей может
отличаться от напряжения тяговой сети. В этом случае импульсный преобразователь, который работает в
течение всего времени включения двигателей, получается более тяжелым и дорогим, чем при
использовании его только при пуске и электрическом торможении, но при этом более полно можно
реализовать преимущества импульсного управления, устраняется влияние на тяговые двигатели
колебаний напряжения и перенапряжений в тяговой сети.
Способы перегруппировки тяговых электродвигателей
Наряду с использованием пусковых сопротивлений для изменения напряжения на ТЭД для
многодвигательных схем применяют изменение группировки двигателей. Известны следующие способы
перегруппировки:
• коротким замыканием;
• шунтированием ТЭД резистором;
• использованием диодов;
• переходом по схеме моста.
Способы перехода отличаются друг от друга по количеству необходимых для их осуществления
аппаратов и плавностью процесса перехода. Например, переход по схеме моста характеризуется
изменениями сил тяги в процессе отдельных переключений, которые сопровождают этот переход. Эти
изменения по возможности должны быть минимальными. Указанные способы перехода рассчитаны на
частичное или полное сохранение силы тяги в момент перехода.
Переход коротким замыканием с отключением одного или нескольких ТЭД на современном
электроподвижном составе не применяется вследствие тяжелых условий работы двигателей в режиме
короткого замыкания и значительных потерь силы тяги.
42.
Перегруппировка двигателей шунтированием ТЭД резистором1
ОВ1
RП1
3
в
ТЕД 1
8
4
7
2
RП2
5
а
6
ОВ2
ТЕД 2
RШ
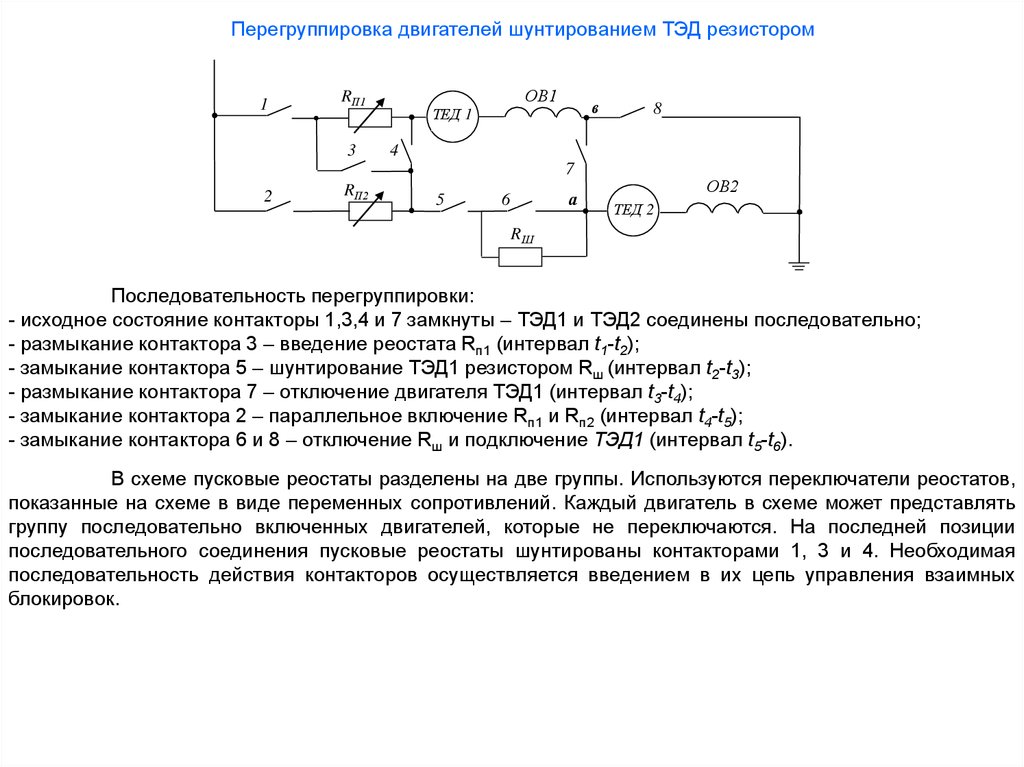
Последовательность перегруппировки:
- исходное состояние контакторы 1,3,4 и 7 замкнуты – ТЭД1 и ТЭД2 соединены последовательно;
- размыкание контактора 3 – введение реостата Rп1 (интервал t1-t2);
- замыкание контактора 5 – шунтирование ТЭД1 резистором Rш (интервал t2-t3);
- размыкание контактора 7 – отключение двигателя ТЭД1 (интервал t3-t4);
- замыкание контактора 2 – параллельное включение Rп1 и Rп2 (интервал t4-t5);
- замыкание контактора 6 и 8 – отключение Rш и подключение ТЭД1 (интервал t5-t6).
В схеме пусковые реостаты разделены на две группы. Используются переключатели реостатов,
показанные на схеме в виде переменных сопротивлений. Каждый двигатель в схеме может представлять
группу последовательно включенных двигателей, которые не переключаются. На последней позиции
последовательного соединения пусковые реостаты шунтированы контакторами 1, 3 и 4. Необходимая
последовательность действия контакторов осуществляется введением в их цепь управления взаимных
блокировок.
43.
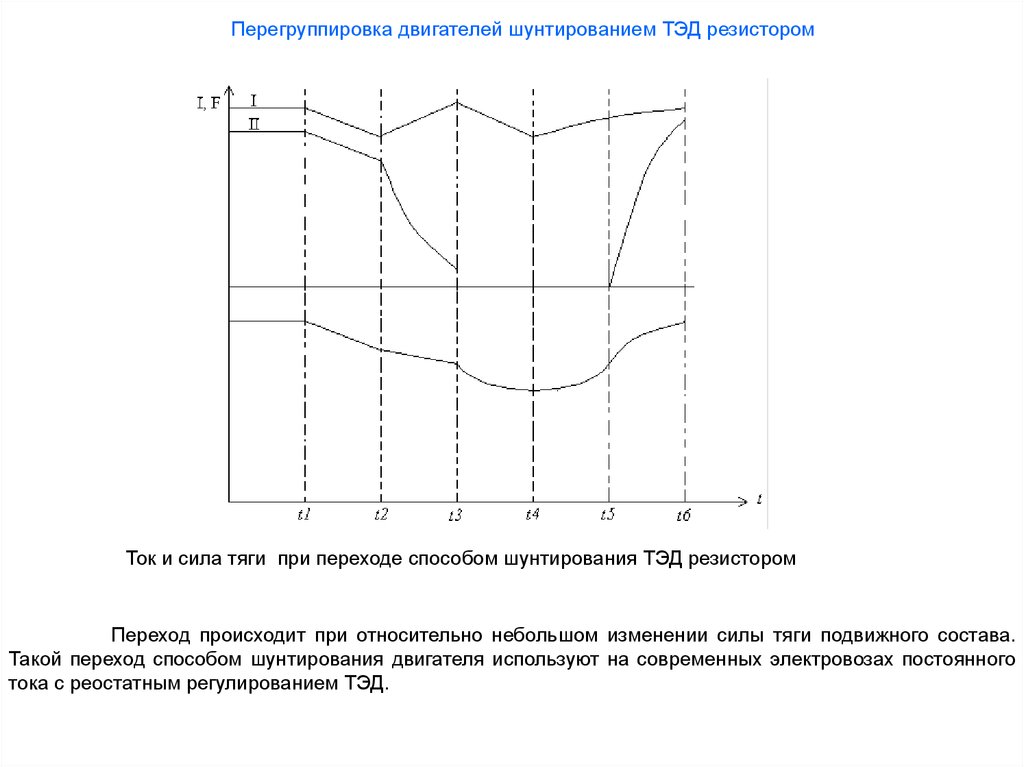
Перегруппировка двигателей шунтированием ТЭД резисторомТок и сила тяги при переходе способом шунтирования ТЭД резистором
Переход происходит при относительно небольшом изменении силы тяги подвижного состава.
Такой переход способом шунтирования двигателя используют на современных электровозах постоянного
тока с реостатным регулированием ТЭД.
44.
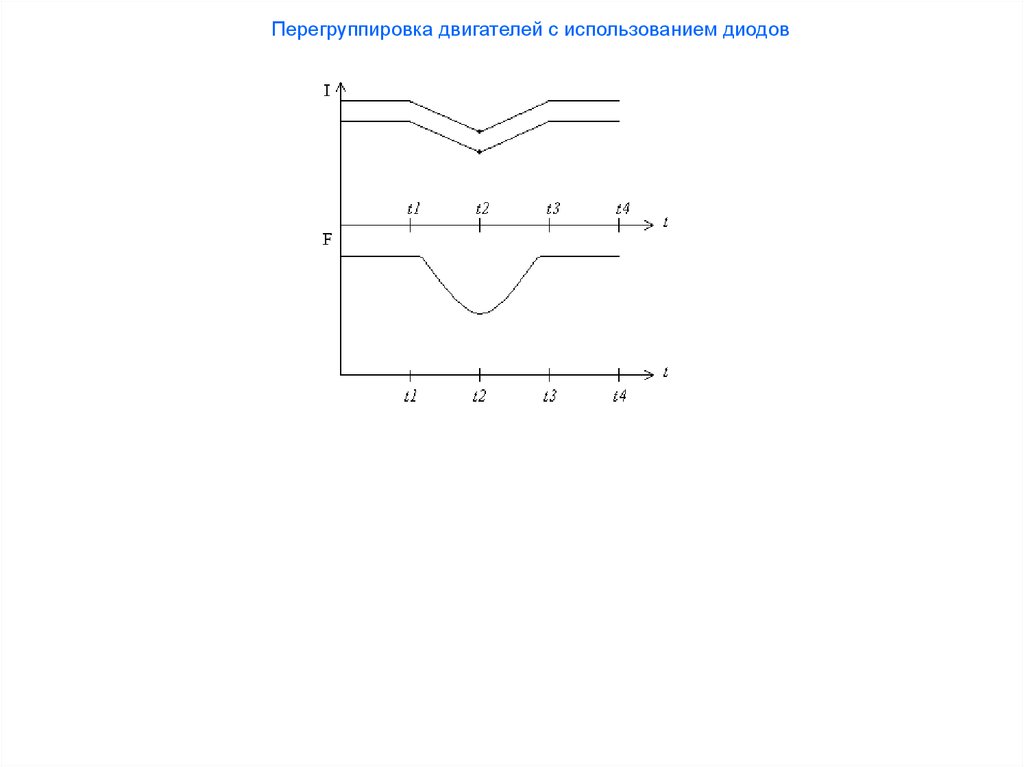
Перегруппировка двигателей с использованием диодов1
ОВ1
RП1
3
7
4
2
RП2
6
ТЕД
1
5
Д
ОВ2
ТЕД
2
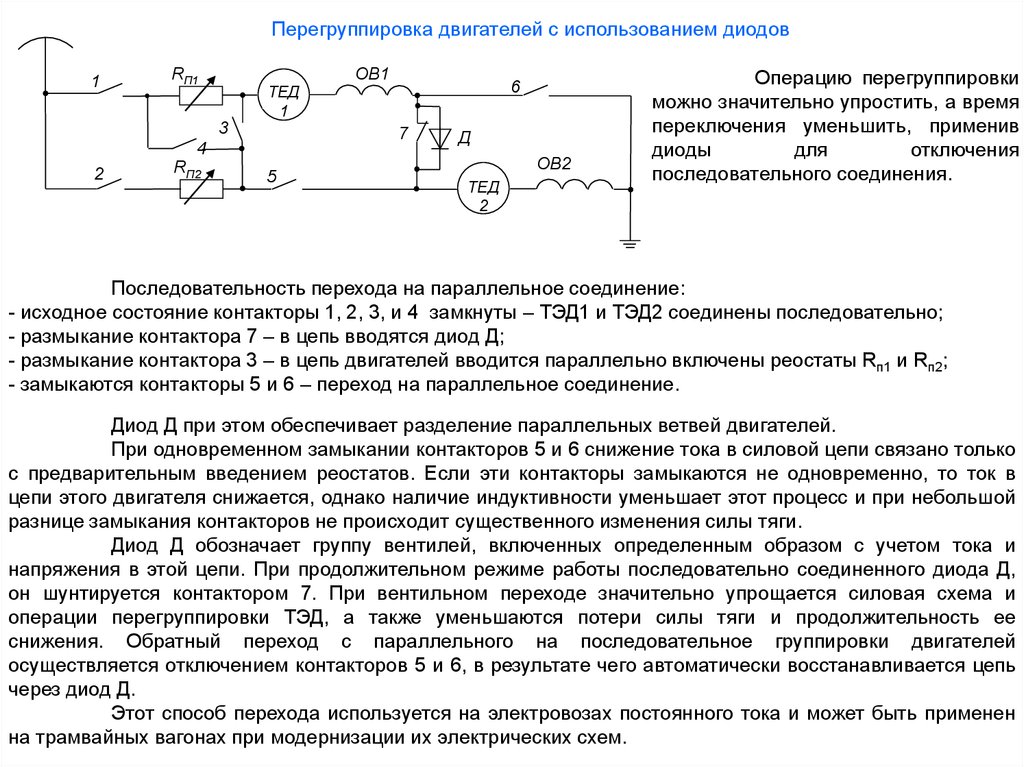
Операцию перегруппировки
можно значительно упростить, а время
переключения уменьшить, применив
диоды
для
отключения
последовательного соединения.
Последовательность перехода на параллельное соединение:
- исходное состояние контакторы 1, 2, 3, и 4 замкнуты – ТЭД1 и ТЭД2 соединены последовательно;
- размыкание контактора 7 – в цепь вводятся диод Д;
- размыкание контактора 3 – в цепь двигателей вводится параллельно включены реостаты Rп1 и Rп2;
- замыкаются контакторы 5 и 6 – переход на параллельное соединение.
Диод Д при этом обеспечивает разделение параллельных ветвей двигателей.
При одновременном замыкании контакторов 5 и 6 снижение тока в силовой цепи связано только
с предварительным введением реостатов. Если эти контакторы замыкаются не одновременно, то ток в
цепи этого двигателя снижается, однако наличие индуктивности уменьшает этот процесс и при небольшой
разнице замыкания контакторов не происходит существенного изменения силы тяги.
Диод Д обозначает группу вентилей, включенных определенным образом с учетом тока и
напряжения в этой цепи. При продолжительном режиме работы последовательно соединенного диода Д,
он шунтируется контактором 7. При вентильном переходе значительно упрощается силовая схема и
операции перегруппировки ТЭД, а также уменьшаются потери силы тяги и продолжительность ее
снижения. Обратный переход с параллельного на последовательное группировки двигателей
осуществляется отключением контакторов 5 и 6, в результате чего автоматически восстанавливается цепь
через диод Д.
Этот способ перехода используется на электровозах постоянного тока и может быть применен
на трамвайных вагонах при модернизации их электрических схем.
45.
Перегруппировка двигателей с использованием диодов46.
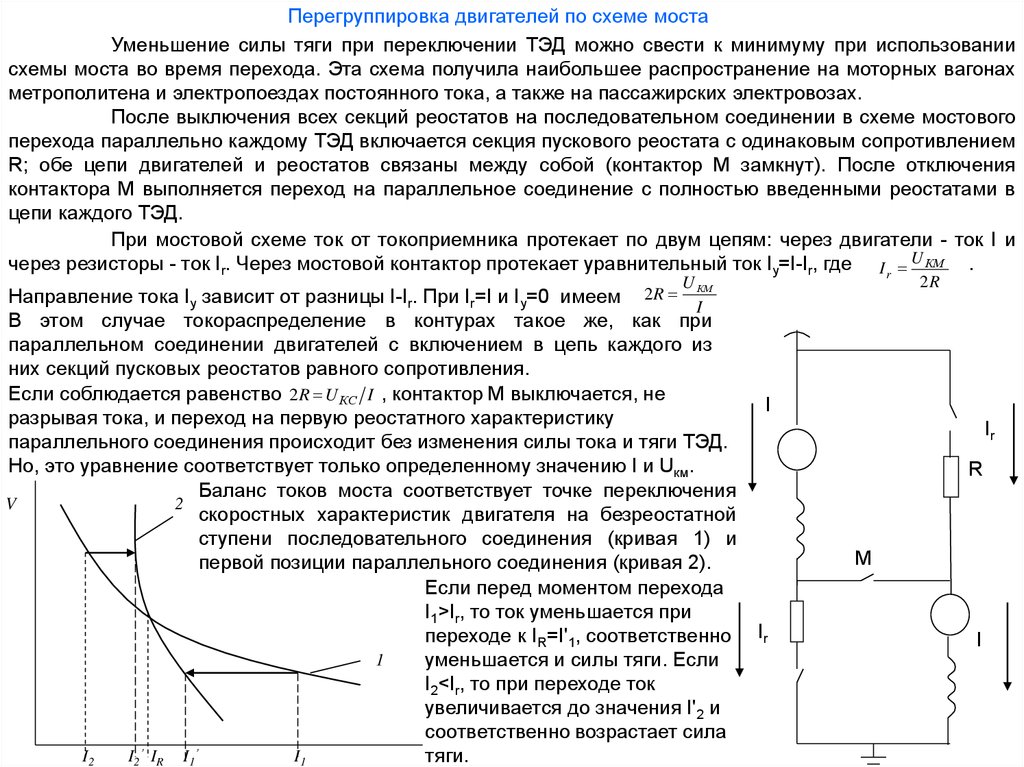
Перегруппировка двигателей по схеме мостаУменьшение силы тяги при переключении ТЭД можно свести к минимуму при использовании
схемы моста во время перехода. Эта схема получила наибольшее распространение на моторных вагонах
метрополитена и электропоездах постоянного тока, а также на пассажирских электровозах.
После выключения всех секций реостатов на последовательном соединении в схеме мостового
перехода параллельно каждому ТЭД включается секция пускового реостата с одинаковым сопротивлением
R; обе цепи двигателей и реостатов связаны между собой (контактор М замкнут). После отключения
контактора М выполняется переход на параллельное соединение с полностью введенными реостатами в
цепи каждого ТЭД.
При мостовой схеме ток от токоприемника протекает по двум цепям: через двигатели - ток I и
через резисторы - ток Ir. Через мостовой контактор протекает уравнительный ток Iу=I-Ir, где I r U КМ .
2R
U КМ
Направление тока Iу зависит от разницы I-Ir. При Ir=I и Iу=0 имеем 2R
I
В этом случае токораспределение в контурах такое же, как при
параллельном соединении двигателей с включением в цепь каждого из
них секций пусковых реостатов равного сопротивления.
Если соблюдается равенство 2R U КC I , контактор М выключается, не
разрывая тока, и переход на первую реостатного характеристику
параллельного соединения происходит без изменения силы тока и тяги ТЭД.
Но, это уравнение соответствует только определенному значению I и Uкм.
Баланс токов моста соответствует точке переключения
V
2
скоростных характеристик двигателя на безреостатной
ступени последовательного соединения (кривая 1) и
первой позиции параллельного соединения (кривая 2).
Если перед моментом перехода
I1>Ir, то ток уменьшается при
переходе к IR=I'1, соответственно
1
уменьшается и силы тяги. Если
I2<Ir, то при переходе ток
увеличивается до значения I'2 и
соответственно возрастает сила
’
’
I2
I2 IR I1
I1
тяги.
I
Ir
R
М
Ir
I
47.
Управление возбуждением ТЭДПроцесс пуска подвижного состава городского электрического транспорта можно разделить на
две стадии: первую, при которой выводятся пусковые сопротивления, и вторую, когда изменяется величина
возбуждения ТЭД. Подвижной состав городского электрического транспорта работает в режимах частых
пусков и остановок. Величина потерь в пусковых реостатах зависит от величины пускового тока, ускорения
и скорости выхода на естественную автоматическую характеристику. Эта скорость, при прочих равных
условиях, обратно пропорциональна магнитному потоку двигателей. Поэтому на подвижном составе
городского электрического транспорта нашли применение ТЭД с широким диапазоном регулирования
скорости путем изменения магнитного потока. Это обеспечивает значительное уменьшение потерь
электроэнергии в пусковых реостатах и расширяет область экономического регулирования скорости
изменением возбуждения. Они выполняются с малым насыщением магнитной цепи при номинальном
режиме и с большим воздушным зазором. При одинаковой силе тяги в области высоких скоростей и
ослабленном поле они позволяют получить более низко расположенную скоростную характеристику при
полном поле. Режим полного поля ТЭД обычно кратковременный, поэтому обмотка возбуждения в этом
режиме может быть рассчитана на работу с перегрузкой. Номинальным режимом, при котором обмотка
возбуждения может быть рассчитана на длительный ток, может быть принято ослабление поля, например,
на 50%. В двигателях смешанного возбуждения при полном поле создаются перегрузки обмотки
параллельного возбуждения.
Регулирование скорости при ослаблении поля можно выполнять одним из следующих способов:
- отключением части витков обмотки последовательного возбуждения;
- параллельным присоединением к обмотке последовательного возбуждения шунтирующих резисторов;
- регулированием величины тока в обмотке параллельного возбуждения (в ТЭД смешанного возбуждения);
- комбинацией первых двух способов;
- регулированием возбуждения с помощью специального возбудителя;
- импульсным регулированием возбуждения (при использовании преобразователей).
48.
Управление возбуждением ТЭДСекция ОВ, которая отключается, должна
быть отсоединена от цепи, иначе она окажется
замкнутой накоротко и при резких изменениях тока
I
ТЭД в ней будет наводиться ЭДС взаимоиндукции,
WC1
WC2
1
ТЕД
как во вторичной обмотке трансформатора. Поскольку
2
ОВ закорочена, то в ней возникают ток и
намагничивающая
сила,
которая
будет
направлена встречно потоку возбуждения оставшейся
обмотки.
В результате будет задерживаться процесс изменения магнитного потока и при резких колебаниях
напряжения в контактной сети может быть нарушены нормальная коммутация и возникнуть круговой огонь
на коллекторе ТЭД.
Способ регулирования скорости отключением части витков ОВ применяют обычно при
относительно неглубоком ослаблении поля, когда ослабление выполняется одной степенью.
При многодвигательных схемах
можно
уменьшить
процесс
колебания
силы
тяги,
если
выполнять отключения обмоток по
очереди. При этом если двигатели
соединены последовательно - будет
значительная
разница
в
напряжениях
якорей,
а
если
параллельно, то возникает разность
токовых нагрузок.
2
I
WC11
ТЕД1
ТЕД2
WC12
1
WC2
WC22
1
3
Двухступенчатый переход: в начале включается контактор 2 и отключается контактор 1, выводя
часть витков обмотки двигателя первой, а затем включается контактор 3 и отключается контактор 2,
выводя часть витков второго двигателя. Здесь первая степень ослабления поля используется как
переходная.
49.
Управление возбуждением ТЭДТЕД
Выполняя определенным образом переключения в ОВ и подбирая
определенное число витков в секциях, можно достичь регулирования ослабления
поля в достаточно широком диапазоне.
При числе витков первой секции в два раза больше числа витков ОВ1
второй секции W1=2W2 схема позволяет ослабить поле до 33% третьей ступени.
3
ОВ2
1
На первой ступени ослабления поля отключается вторая секция:
контактор 2 включен, а контактор 1 – отключен.
На второй ступени ослабления поля обмотки включены параллельно с
контакторами 2 и 3.
На третий ступени отключается контактором 2 первая секция обмотки.
2
При использовании шунтирующих резисторов остается неизменным число витков, а
изменяется ток ОВ. С помощью дополнительных контакторов можно получить практически любое
число ступеней ослабления поля.
Указанные способы регулирования возбуждения имеют следующие недостатки:
- При регулировании поля с использованием переключения обмоток
ТЕД
ТЭД необходимо иметь дополнительные выводы от ОВ, что приводит к некоторому
увеличению радиальных размеров, веса и усложнению конструкции ТЭД. Но при
использовании секционирования обмоток получаются более стабильные
скоростные и тяговые характеристики ТЭД, так как на степень ослабления поля R
в
практически не влияет температура ОВ;
- При регулировании поля с использованием активных сопротивлений
кроме резисторов и контакторов нужны дополнительные аппараты - индуктивные
шунты. Но при использовании шунтирующих резисторов на отклонение
характеристик от расчетных влияет температура обмоток, сопротивление контактов
и проводов в силовой цепи, а также допуски на шунтирующие сопротивления.
1
Rш
50.
Управление возбуждением ТЭДРегулирование возбуждения с использованием возбудителя
Принцип действия такого способа заключается в том, что
І
параллельно обмотке возбуждения С1-С2 через дополнительный
резистор R подключается специальный возбудитель В. Изменяя
возбуждение возбудителя, можно изменять ток возбуждения
двигателя. Такой возбудитель может быть как электромагнитный, так и
полупроводниковый.
Эта
схема
нашла
применение
при
необходимости
изменения
возбуждения
двигателей
последовательного возбуждения в режиме рекуперации. Резистор R
необходим, чтобы от одного возбудителя можно осуществлять
питание нескольких обмоток возбуждения параллельно включенных
ТЭД.
ТЕД
R
+
С1
ІВ
С2
В
-
При импульсном регулировании возбуждения параллельно ОВ подключают импульсный
электронный регулятор, действующий как шунтирующее сопротивление. Благодаря своему
быстродействию импульсный регулятор позволяет сохранить четкое распределение тока якоря между ОВ
и регуляторов переходных режимов, что важно для хорошей коммутации ТЭД.
Способ регулирования магнитного потока для ТЭД смешанного возбуждения зависит от его
выполнения. При преобладании намагничивающей силы параллельной ОВ ослабление поля
осуществляется уменьшением тока в ней путем введения в ее цепь сопротивления.
При преобладании намагничивающей силы последовательной ОВ обычно первая степень
ослабления поля выполняется отключением шунтирующей обмотки, а следующие степени - путем
шунтирования сериесной обмотки активным сопротивлением (троллейбус ЗИУ-9).
51.
Назначение и выбор параметров индуктивного шунтаПри шунтировании обмоток последовательного возбуждения ТЭД только активным
сопротивлением появляются нежелательные переходные процессы при резких колебаниях напряжения в
контактной сети. Особенно опасны переходные процессы возникают при кратковременных отрывах
токоприемников или ошибочном проезде под током изоляционных вставок контактной сети. При этом
происходит потеря питания с последующим восстановлением напряжения. В этом случае в первый момент
после восстановления напряжения большая часть тока якоря проходит по шунтирующим сопротивлениям,
потому что ОВ имеет значительное индуктивное сопротивление. При этом величина магнитного потока
незначительна и происходит резкое увеличение тока якоря. Следует отметить, что при переходном
процессе коэффициент ослабления поля значительно меньше, чем в стационарном режиме.
Резкое увеличение тока якоря по сравнению с током в ОВ главных и добавочных полюсов
приводит к ухудшению условий коммутации, что может вызвать вспышку под щетками и образование
кругового огня.
Для устранения этих явлений в цепи шунтирующего сопротивления вводится индуктивность в
виде катушки со стальным сердечником. При этом, для того, чтобы ток при переходном режиме
равномерно распределялся между индуктивным шунтом и ОВ ТЭД, необходимо, чтобы постоянная
времени этих цепей была одинаковой, то есть
L
L
Ш
rШ
В
rВ
При переходных процессах изменение магнитного потока зависит от действия вихревых токов,
возникающих в сердечниках главных и дополнительных полюсов. Поэтому индуктивность шунта
рекомендуется выбирать из практического соотношения:
Lш 0,5 0,75 Lв
Для двигателей с глубоким ослаблением поля рекомендуется большее значение.
Собственный активное сопротивление индуктивного шунта должен быть
rпш rш min
( rш min - сопротивление цепи индуктивного шунта ходовой позиции при максимальном ослаблении поля).
52.
Назначение и выбор параметров индуктивного шунтаПо мере ослабления поля намагничивающая сила индуктивного шунта возрастает, а
намагничивающего сила ТЭД уменьшается (происходит снижение насыщения двигателя). Поэтому, чтобы
при перегрузке не происходило значительное снижение постоянной времени индуктивной шунта,
целесообразно его выполнять с большим воздушным зазором.
Индуктивный шунт представляет собой одну или несколько катушек, размещенных на стальном
сердечнике. Если индуктивный шунт выполняют для нескольких групп двигателей, то катушки включают
таким образом, чтобы их намагничивающей силы суммировались. За счет этого индуктивность шунта
возрастает. Для подвижного состава городского электрического транспорта индуктивные шунты выполняют
со стержневым сердечником, набранным из расслоенной электротехнической стали.
53.
Расход энергии на движение ЭПСЭлектрическая энергия, которую подвижной состав потребляет из контактной сети, расходуется
на выполнение ряда задач, в том числе:
• преодоление основного сопротивления движению;
• преодоление сопротивления криволинейных участков;
• преодоление сопротивления на уклонах (эта составляющая общего расхода энергии затрачивается на изменение потенциальной
энергии поезда при его подъеме или спуске при движении на уклоне);
• потери в тормозных устройствах при остановке поезда;
• потери в тормозных устройствах при подтормаживании на крутом спуске;
• потери в пусковых устройствах;
• потери в тяговых двигателях, передаточных механизмах, преобразовательных устройствах, в тяговой
сети.
Условия работы поездов на линии при электровозной тяге и в промышленном транспорте
существенно отличаются от условий работы городского, пригородного транспорта и метрополитена. На
городском, пригородном транспорте и метрополитене, для которых характерны короткие перегоны между
остановками, большая часть электроэнергии тратится при пуске и торможении. Тормозные и пусковые
потери здесь составляют 60...70% общего расхода электрической энергии на движение поездов.
При электровозной тяге составляющая пусковых и тормозных потерь невелика и не превышает
10...20% общего расхода электроэнергии. Основная же часть электрической энергии тратится на
преодоление основного сопротивления движению и подтормаживание на вредных спусках.
Наименьший расход электрической энергии имеет место на грузовых поездах при движении на
равнинных двухпутных участках. Скорость движения грузовых поездов невелика, потери в пусковых
реостатах и тормозах составляют 15 % всех основных затрат электроэнергии. Удельный расход энергии
при таких условиях работы не превышает 10 Вт·ч(т·км).
При движении на участках с более тяжелым профилем удельный расход электрической энергии
может увеличиваться до 15 Вт·ч/(т·км). На однопутных участках с тяжелым профилем и малыми
расстояниями между остановочными пунктами удельный расход электроэнергии может достигать 20
Вт·ч/(т·км).
54.
Расход энергии на движение ЭПСНа пассажирских поездах дальнего следования, где скорости движения выше, чем на грузовых
поездах, удельный расход энергии составляет 20... 30, а при очень высоких скоростях до 60 Вт·ч/(т·км).
На электропоездах пригородного движения удельный расход электроэнергии составляет 30...40
Вт·ч/(т·км) вследствие увеличения пусковых и тормозных потерь. При использовании рекуперативного
торможения удельный расход энергии снижается до 20...30 Вт·ч/(т·км). На сверхскоростных поездах
удельный расход электрической энергии возрастает до 60... 80 Вт·ч/(т·км).
На электропоездах метрополитена удельный расход энергии достаточно высок - 50... 70
Вт·ч/(т·км). Это объясняется небольшими расстояниями между остановками и увеличением основного
сопротивления при движении в тоннеле. При использовании тиристорно-импульсных преобразователей на
подвижном составе и применении рекуперативного торможения удельный расход электроэнергии удается
снизить до 35...45 Вт·ч/(т·км).
На городском электрическом транспорте скорости движения невелики, но имеют место короткие
перегоны, дополнительные торможения и пуски в условиях уличного движения. В связи с этим удельный
расход электроэнергии на городском электрическом транспорте выше, чем на пригородных участках с
мотор-вагонной тягой.
На трамвайных вагонах удельный расход энергии колеблется в широких пределах 35...80
Вт·ч/(т·км) в результате разнообразий условий работы различных трамваев по профилю, типу вагонов,
длине перегонов и скоростям движения. На скоростных трамваях удельный расход энергии достигает 100
Вт·ч/(т·км).
На безрельсовом городском электротранспорте - троллейбусе и электромобиле - удельный
расход электроэнергии резко возрастает до 150...180 Вт·ч/(т·км), что объясняется увеличенным основным
сопротивлением движению при качении резинового колеса по дороге.
В основном все способы снижения расхода электрической энергии на движение ЭПС
заключаются в уменьшении основного сопротивления движению посредством правильного содержания
подвижного состава и пути, увеличения КПД ЭПС, уменьшения пусковых и тормозных потерь, уменьшения
потерь энергии в контактной сети и на тяговых подстанциях.
55.
Расход энергии на движение ЭПСПотери в ДПТ можно уменьшить, широко используя ослабленное возбуждение, так как в зоне
средних и больших нагрузок заметную роль играют электрические потери в цепи возбуждения. Уменьшая
сопротивление цепи возбуждения, можно добиться сокращения электрических потерь и соответственно
увеличения КПД.
Следует избегать езды на последовательном соединении тяговых двигателей или на позициях
пониженного напряжения ЭПС с преобразователями, так как работа в режиме пониженного напряжения
значительно ухудшает КПД двигателей и преобразователей.
Уменьшению расхода электрической энергии способствует экономия энергии на собственные
нужды поезда. Особенно велик расход энергии на вентиляцию преобразователей и тяговых двигателей
электровозов однофазного постоянного тока (иногда он составляет 15 % общего расхода энергии).
Регулируя частоту вращения вентиляторов, можно сократить количество потребляемой ими энергии.
В пассажирских вагонах значительное количество энергии тратится на электрическое отопление
и кондиционирование воздуха. Для снижения этой составляющей большую роль играет правильное
автоматическое регулирование температуры, хорошая термоизоляция.
В грузовом движении при неполной загрузке поезда снижается средний КПД тяговых
двигателей, особенно КПД преобразовательного электроподвижного состава. Одновременно
увеличивается удельное основное сопротивление движению, в основном, из-за увеличения сопротивления
воздушной среды.
Заметная экономия энергии достигается при правильном вождении поездов. Поезд следует
вести таким образом, чтобы тормозные потери Ат были минимальными. Это особенно важно при коротких
перегонах, которые имеют место при мотор-вагонной тяге.
Снижению расхода электрической энергии способствуют методы, связанные с рациональной
конструкцией ЭПС, в частности:
• применение на подвижном составе современных типов тормозов, что позволяет поднять ограничение по
скорости на спусках и тем самым ликвидировать расход на подтормаживание, а также увеличить
тормозное замедление;
• применение на пассажирском ЭПС удобных устройств для посадки пассажиров (достаточное число
широких дверей, подсветка ступеней и т.д.), что сокращает время стоянки;
• использование пусковых и тормозных потерь в реостатах для отопления салонов;
• применение рекуперативного торможения, которое позволяет резко сократить тормозные потери.
56.
Расход энергии на движение ЭПСКак при электровозной, так и при мотор-вагонной тяге (включая метрополитен, трамвай,
троллейбус, маневровый транспорт, электромобили и т.д.), где имеют место короткие перегоны,
эффективность рекуперации достаточно высокая. Для использования избыточной энергии рекуперации
возможны следующие технические решения: установка на тяговых подстанциях инверторных агрегатов
или использование на электроподвижном составе или в системе электроснабжения накопителей энергии.
Первый вариант нашел применение на магистральном транспорте. Второй вариант также
позволяет улучшить энергетические показатели электрической рекуперации (включая и для автономного
ЭПС) при установке накопителей непосредственно на подвижной состав, так и сглаживание
неравномерности электропотребления при установке накопителей в системе электроснабжения. В
качестве накопителей могут быть электрохимические, индуктивные, емкостные, инерционные маховичные,
электромеханические, электродинамические генераторы. Сравнение разных типов накопителей
показывает, что пока лучшими массогабаритными показателями обладают маховичные накопители
энергии. Однако практическую реализацию находят электрохимические и емкостные накопители.
Накопитель энергии позволяет не только накапливать энергию рекуперации, но и отдавать ее в двигатель в
период тяги. Пример тяговой характеристики при совместном действии основного источника энергии
(участок АВDЕ) и накопителя (участок ABCDE) приведен на рис.
Рассмотренные методы можно использовать и для снижения
расхода энергии и топлива автономным электрическим подвижным
составом. К ним относятся, например, способы уменьшения тормозных
потерь для аккумуляторного подвижного состава, связанные с
использованием рекуперативного торможения. Использование накопителей
энергии на магистральном автономном транспорте нереально из-за
больших массогабаритных показателей накопителей для этих видов ЭПС,
но для маневровых локомотивов вполне возможна рекуперация энергии
торможения в накопитель, установленный на самом локомотиве.
Тяговая характеристика ЭПС
с накопителем энергии
57.
Расход энергии на движение ЭПСЗначительно ухудшает КПД работа двигателей при пониженном напряжении. Поэтому следует
избегать длительной езды на последовательных и последовательно-параллельных позициях для
аккумуляторного ЭПС, и при низком напряжении тягового генератора тепловозов. Ухудшение среднего КПД
имеет место также при недоиспользовании мощности двигателей, так как в области малых нагрузок КПД
резко падает. Особенно неэкономична работа при малых нагрузках для аккумуляторного состава с
преобразователями.
Расход электроэнергии на собственные нужды ЭПС составляет сравнительно небольшой
процент общего расхода, однако и его надо стремиться снижать. Например, значительное количество
электроэнергии можно сэкономить, если правильно отрегулировать терморегуляторы, включающие
отопление вагонов.
Расход топлива тепловозом определяется также и экономичностью дизеля. Известно, что КПД
дизеля при разгоне и низких скоростях движения поезда невелик. Кроме того, экономичность работы
теплоэлектрического подвижного состава зависит от положения контроллера машиниста. Известно, что
дизели на подвижном составе сравнительно большое время работают на холостом ходу и частичных
нагрузках. Поэтому при изменяющихся условиях движения очень важна своевременная установка
контроллера машиниста в наиболее экономичный режим работы дизеля, что обеспечит минимальный
расход топлива. Наиболее целесообразно использование систем автоматического регулирования
мощности в соответствии с наибольшей экономичностью работы дизеля. Для повышения экономичности
теплоэлектрического подвижного состава, имеющего две или более теплоэлектрических установок
(например, тепловоз с двумя секциями), на сравнительно легких участках пути можно выключать одну
установку вместе с тяговыми электродвигателями, питающимися от нее. При этом КПД дизеля и тяговых
электродвигателей, оставшихся в работе, повысится, поскольку они будут работать с большей нагрузкой.
Для экономии топлива, расходуемого на тягу поездов, нужно умело использовать кинетическую
энергию движущегося поезда, зависящую от массы поезда и квадрата скорости движения. Так, при
движении по спуску необходимо тормозами поезда управлять с таким расчетом, чтобы к концу его
достигалась наибольшая скорость движения. Накопленный запас энергии в дальнейшем будет
использован для движения по горизонтальному пути или по подъему с меньшими затратами топлива.
Наиболее экономичным является движение поезда с минимальным использованием тормозов.
58.
ДОНЕЦКИЙ ТРАМВАЙВ Донецке в 1927 году было принято решение о строительстве первой трамвайной линии.
Официальное открытие состоялось в июне 1928 года.
В настоящее время на маршрутах города можно встретить трамваи типа:
- Татра Т-3 (160 вагонов) с 1967г.;
- Татра-Юг (Т6В5) (6 вагонов), с 2003г.;
- К-1 (28 вагонов) с 2004г.;
- ЛМ-2008 (1 вагон) с 2010 года;
- два ретро-трамвая.
Трамвай типа Татра Т-3
Трамвай типа К-1
59.
Трамвай типа Татра Т-3Трамвайный вагон Т-3 приводится в движение четырьмя тяговыми двигателями ТЕ-022 с
последовательным возбуждением мощностью по 44 кВт при номинальном напряжении 300 В. Двигатели
закрытого типа имеют независимую вентиляцию. Тяговые двигатели на вагоне соединены постоянно
последовательно-параллельно.
Вагон оборудован плавной автоматической системой управления. Переключения в цепях
тяговых двигателей
выполняются индивидуальными контакторами (19 контакторов) и ускорителями
имеющими 75 пусковых и 99 тормозных позиций.
Вагон
Т-3
управляется
контроллером
управления, состоящим из двух
аппаратов, смонтированных в
общем блоке: контроллера хода
JK и тормозного контроллера
BK; каждый аппарат имеет свой
педальный привод, а также
реверсором, имеющим ручное
управление. В случае если
водителю нужно оставить пост
управления при стоянке вагона
в депо или на остановке,
следует
тормозную
педаль
поставить на защелку – вагон
будет заторможен колодочными
тормозами.
60.
Трамвай типа Татра Т-3Контроллер управления Н-14 устанавливается в кабине под пультом управления и имеет
педальный привод через рычаги 12 и 3. Пусковой барабан образуют три кулачковых 11 и одна упорная
шайбы, насаженные на стальную трубу. Он приводом связан с пусковой педалью 1 и имеет пять
нефиксированных положений. Каждая кулачковая шайба включает и выключает два кулачковых элемента.
Кулачковые контакторы 6 монтируют на изоляционных панелях, расположенных по обе стороны от
пускового и тормозного барабанов (шесть кулачковых контакторов JK1-JK6 пускового контроллера и десять
ВК1-ВК10 тормозного контроллера). Тормозной контроллер выполнен из пяти кулачковых шайб 9 и
упорной 8, укрепленных на валу, который проходит через отверстие цилиндрического вала пускового
барабана и с помощью привода связан с тормозной педалью 2. Пусковой и тормозной барабаны
вращаются в подшипниках, установленных в боковинах 7 каркаса, угол поворота их ограничивается
упорными шайбами 10 и 8, а полный разворот педалей (40+1°) - резиновыми упорами. Возврат барабанов
в исходное (нулевое) положение осуществляется пружинами 5.
Тормозной барабан имеет пять нефиксированных положений электрического реостатного
торможения, среднее (шестое) фиксированное положение - включается колодочный тормоз и седьмое
нефиксированное положение - включается рельсовый тормоз. Фиксирующее устройство 4 тормозной
педали состоит из храповика и рычага с пальцем - «защелки».
При
осуществлении
торможения
вагона
следует
тормозную педаль нажимать с
упором на верхнюю ее часть, а для
освобождения
педали
с
фиксированного положения (для
«снятия
с
защелки»)
педаль
следует нажимать с упором на
нижнюю ее часть и затем плавно
устанавливать в верхнее нулевое
положение.
Общий вид и монтажная схема контроллера управления Н-14
61.
Трамвай типа Татра Т-3Ускоритель вагона Т-3 представляет собой многопозиционный переключатель клавишного типа,
осуществляющий автоматическое выведение пускотормозных реостатов и обеспечивающий плавный пуск
и торможение вагона.
Ускоритель вагона Т-3
Основанием ускорителя служит большой цилиндрический барабан 1, выполненный из изоляционного материала. В нижней части к
барабану укреплено чугунное токосъемное кольцо 23 с шестью медными сегментами 24, а в верхней части чугунная плита 15, на которой установлен
редуктор 7. С наружной стороны барабана на пружинных держателях 9 и 11 укреплены 95 ленточных элементов реостата 10, изготовленных из
сплава, обладающего высоким удельным сопротивлением. Полное сопротивление реостата составляет 3,614 Ом. С внутренней стороны к барабану
крепятся 99 контактных пальцев 13 с помощью болтов 12 и держателей 11 элементов. Зазор между пальцем и сегментом токосъемного кольца
должен быть в пределах 3-5 мм, а расстояние между смежными пальцами 3,5-4 мм. Пальцы ускорителя, расположенные по одной полуокружности
барабана, имеют нечетную нумерацию 1; 3; 5 и т. д. до 99, по другой полуокружности - четную нумерацию 2; 4; 6 и т. д. до 98. К выводам 6 пальцев 1;
2; 75 и 76-го подключены наконечники внешних кабелей 2. Замыкание пальцев с токосъемными сегментами происходит при накатывании на пальцы
изоляционных роликов 18, укрепленных на рычагах 17 крестовины 19.
Вращение крестовины происходит от электродвигателя РМ ускорителя, связанного с редуктором гибким карданным валом 4, на котором
закреплена шестерня редуктора и крестовины 19 ускорителя. Червячный редуктор имеет передаточное число 50,5. На крестовине 19 укреплен малый
изоляционный барабан 21. На поверхности барабана размещены пять рядов сегментов 16, предназначенных для включения и выключения низковольтных
кулачковых контакторов ускорителя ZR1-ZR10. Устанавливаются они на изоляционных панелях 14 и 22 по обе стороны малого изоляционного барабана.
Включение кулачковых контакторов ZR1-ZR10 происходит при вращении малого барабана и зависит от позиции ускорителя.
Крестовина ускорителя может поворачиваться почти на половину оборота (до упора), при этом ее ролики прижимают соответствующие
контактные пальцы к токосъемному кольцу. Позиции ускорителя обозначают по номерам прижатых пальцев. Когда первый ролик крестовины замыкает один
палец с токосъемным кольцом, второй ролик находится в положении, при котором он прижимает два пальца и наоборот. Поэтому при вращении крестовины
чередуются нажатия четных н нечетных пальцев; таким образом ускоритель имеет позиции от 1-й до 99-й.
62.
Трамвай типа Татра Т-3В начале пуска вагона ускоритель находится на 1-й позиции. Ток идет на вывод, соединенный с
75-м пальцем (рис.а) , по нечетным элементам реостата до 1-го пальца, прижатого к токосъемному кольцу,
далее по токосъемному кольцу до 2-го пальца, затем по четным элементам реостата на вывод 76-го
пальца. Крестовина ускорителя, вращаясь в направлении от 1-й к 99-й позиции по мере увеличения
скорости вагона прижимает к токосъемному кольцу поочередно 3, 4, 5-й (и т. д.) пальцы, выводя пусковой
реостат из цепи тягового электродвигателя (рис.б). На 75-й позиции ток по ускорителю идет, минуя реостат,
с 75-го пальца по токосъемному кольцу на 76-й палец.
При электрическом торможении
ток по реостату ускорителя идет в обратном
направлении: на вывод 2-го пальца (рис.в) по
четным элементам реостата до прижатого к
токосъемному кольцу пальца (при большой
скорости движения вагона замкнуты 98-й и
99-й пальцы), по токосъемному кольцу через
замкнутый нечетный палец, по нечетным
элементам реостата на вывод 1-го пальца.
По мере уменьшения скорости вагона
двигатель
ускорителя
РМ
вращает
крестовину в направлении от 99-й к 1-й
позиции (рис. г), вследствие чего тормозной
реостат выводится. При выбеге вагона
ускоритель работает так же, как и при
торможении, но крестовина вращается с
меньшей скоростью.
Схема прохождения тока в цепи на позициях ускорителя в начале пуска (а), при разгоне (б),
в начале торможения (в), при торможении (г)
63.
Трамвай типа Татра Т-3В реостате ускорителя при работе выделяется большое количество тепла, поэтому для
предупреждения перегрева и деформации элементов реостата ускоритель непрерывно обдувается
воздухом, подаваемом вентиляторами двигателя-генератора. В холодное время нагретый ускорителем
воздух направляется по каналам вдоль правого борта кузова в салон вагона, а в теплое время
выбрасывается в атмосферу.
Ускоритель имеет массу 180 кг. Он подвешивается на трех шпильках 8 под
кузовом в средней части вагона в специальном отсеке, закрываемом двумя крышками
снизу и съемным люком в полу вагона.
Вагон Т-3 имеет три вида тормозов: электрический реостатный,
механический с соленоидным приводом и электромагнитной рельсовый. Реостатное
торможение является служебным. При низкой скорости
вагона
реостатное
торможение
становится
малоэффективным и тогда на него автоматически
накладывается механическое торможение. Механический тормоз (колодочннй)
установлен на валу каждого тягового двигателя. Датчиком для автоматического
замещения реостатного торможения механическим служит блокировочное реле LO.
Это реле имеет две катушки: одну в цепи тормозного контура тяговых двигателей,
вторую – в цепи управления, получающую питание на нулевом положении педалей
на всех ходовых и первых четырёх тормозных положениях контроллера управления.
Механические тормоза включаются при выключении обеих катушек блокировочного
реле. Рельсовые тормоза используются только при экстренном торможении.
Цепи управления, рельсовых, механических тормозов и сигнализации питаются
от генератора G мощностью 1,6 кВт с номинальным напряжением 24 В, работающего
параллельно с аккумуляторной батареей, имеющей номинальную емкость 100Ач. В
качестве привода генератора используют двигатель с последовательным возбуждением,
имеющий длительную мощность 5 кВт.
ленточный элемент реостата и
схема развертки кулачковых контакторов 2К ускорителя
64.
Трамвай типа Татра Т-3Подготовка вагона к
пуску. Устанавливают токоприемник на контактный провод.
Включают рубильник аккумуляторных батарей. Тормозная педаль должна находиться стояночном
положении – на защелке, при этом кулачковый контактор тормозного контроллера ВК1 будет включен.
Контактами схемы управления готовится «сборка» схемы. Включается двигатель-генератор.
Питание к двигателю генератора идет из контактной сети. Подключается генератор к аккумуляторной
батарее. При этом подзаряжается аккумуляторная батарея и переводится питание цепей управления с
аккумуляторной
батареи
на
генератор. После включения двигателя генератора начинается
принудительная вентиляция тяговых двигателей и пуско-тормозных реостатов ускорителя.
Реверсивную рукоятку ставят в рабочее положение, например «Вперед», и тогда замкнутся
контакты реверсора и получат питание катушки реверсивных контакторов Р1–Р4 (при положении рукоятки
реверсора «Назад» замкнутся контакты и включат катушки Z1–Z4).
После отпускания тормозной педали с положения защелки в нулевое положение
подготавливается к включению контактор механического тормоза. Катушки соленоидов получают питание
через резистор, при этом колодочные тормоза частично растормаживаются.
Пуск вагона. Педаль контроллера хода имеет пять нефиксированных положений. При нажатии
на одно из положений водитель выбирает ускорение, с которым будет работать вагон.
На 1-м ходовом положений педали включаются кулачковые контакторы контроллера JK1(1–5),
JK2(1–5), JK3(0–1). Происходит полное оттормаживание колодочных тормозов. Включается линейный
контактор LS, после чего получают питание от контактной сети ТЭД. Ток в ТЭД идет через токоприемник,
линейный контактор LS, катушку максимального реле MR и далее по двум параллельным цепям ТЭД:
1-я цепь: провод 3–MDR–якоря 4-го и 3-го ТЭД – OR–P3 – ОВ 4-го и 3-го ТЭД – Р4 – шунт
амперметра Sh–M1;
2-я цепь: провод 3–Р1 – ОВ 2-го и 1-го ТЭД (параллельно через контактор F2 и индуктивный
шунт) – Р2 – МDR – якорь 2-го и 1-го ТЭД – М1. Далее ток обеих цепей двигателей идет через пусковой
реостат ZR, две пусковые (демпферные) ступени резисторов на провод 100. Включается контактор R1,
выводящий первую ступень (0,7 Ом) демпферного резистора из цепи ТЭД. Включается контактор R2,
который выключает вторую ступень (0,7 Ом) демпферного резистора. Включение на некоторое время
пусковых демпферных резисторов и ослабление возбуждения 2-го и 1-го тяговых двигателей вызывает
уменьшение вращающего момента ТЭД, что необходимо для выбора люфтов в силовой передаче вагона.
65.
Трамвай типа Татра Т-3Это делает плавным начальный момент пуска вагона.
После включения контакторов LS и R2 блок-контакты контакторов замыкают цепь питания якоря
серводвигателя РМ. Серводвигатель начинает вращать крестовину ускорителя в направлении от 1-й к 99-й
позиции, выводя пусковой реостат из цепи тяговых двигателей под контролем ограничительного реле ОR,
поддерживая значение пускового тока, которое определяется уставками ограничительного реле. Во время
пуска вагон разгоняется с ускорением. Пуск происходит при наименьшем токе в цепи тяговых двигателей
200–230 А на вагон, что соответствует ускорению 0,6 м/с2 при ненагруженном вагоне. Во время пуска на
втором положений педали увеличивается ток в силовой цепи до 280–300 А (в обеих цепях тяговых
двигателей), и ускорение увеличивается до 0,95 м/с2.
На 3-м и 4-м положениях педали ток в регулировочной катушке RC уменьшается, а на 5-м
положении педали ток в силовой цепи увеличивается, соответственно, растет и ускорение движения
вагона: на 3-м положения педали - 1,2 м/с2; на 4-м - 1,5 м/с2; на 5-м - 1,8 м/с2. На любом положений
выбранного ускорений пуск заканчивается выходом на максимальное ослабление возбуждения.
На 75-й позиции ускорителя его кулачковый контактор включает катушку контактора М2 и
завершается реостатный пуск. Крестовина ускорителя поворачивается дальше под контролем
ограничительного реле. На 80-й позиции кулачковый контактор ZR4 включает контактор F4, создавая
первую ступень ослабления возбуждения 2-го и 1-го тяговых двигателей. На 85-й позиции кулачковый
контактор 2,8,6 ускорителя включает контактор F1 создающий первую ступень ослабления 4-го и 3-го ТЭД.
На 90-й позиции контактами ZR5 включается контактор F3, создавая вторую ступень ослабления
возбуждения 3-го и 4-го, ТЭД, и на 95-й позиции контактами ZR3 включается контактор F2, создающий
вторую ступень ослабления возбуждения 2-го и 1-го ТЭД. Во время поочередного включения ступеней
ослабления возбуждения ТЭД получаются меньшие колебания силы тяги вагона по сравнению с
одновременным включением обеих групп ТЭД.
66.
Трамвай типа Татра Т-3BL
1
LS
13
4
MK 2
3
OR
10
5
Z2
P1
F2
2
4
15
F4
MDR
P3
11
12
LO
MDR
3
Z3
Z4
18
16
F3
P4
F1
20
14
A
Sh
17
3
Z1
P2
1
2
4
B1
8
25
Торможение
26
6
B2
9
1
M1
16
M2
Движение
R1 23
ZR
22
R2 100
67.
Трамвай типа Татра Т-3Выбег. При возврате пусковой педали в нулевое положение размыкаются кулачковые
контакторы контроллера хода JK (кроме JK3). Катушки контакторов LS, М1 и М2 продолжают получать
питание. Кулачковый контактор JK2 отключает питание катушки R1, затем блок-контакт контактора R1
отключает питание катушки R2 и в цепь ТЭД поочередно вводятся демпферные резисторы. После
выключения контактора R2 его блок-контактами выключаются контакторы LS, M1 и M2 и питание ТЭД
прекращается. Такая последовательность отключения ТЭД от контактной сети обеспечивает более
плавное уменьшение ускорения, облегчает работу дугогасительных устройств контакторов и коммутацию
ТЭД.
Включаются тормозные контакторы В1 и В2, включается контактор F2, создающий
максимальное ослабление возбуждения 1-го и 2-го ТЭД, что снижает тормозную силу вагона. После
включения тормозных контакторов В1 и В2 в силовой цепи собираются два тормозных контура. Вагон Т-3
чистого выбега не имеет, тяговые двигатели при выбеге работают в генераторном режиме. Группы ТЭД
включаются между собой параллельно по перекрестной схеме. Тормозной ток якорей 3-го и 4-го ТЭД
замыкается по цепи MDR–P1 – ОВ 2-го и 1-го ТЭД (параллельно ток идет через контактор F2 и
индуктивный шунт) – Р2–В2 – тормозной реостат ускорителя ZR–В1–LО – якоря 3-го и 4-го ТЭД.
Аналогично тормозной ток якорей 1-го и 2-го тяговых двигателей замыкается по цепи MDR–В2 – тормозной
реостат ускорителя ZR–В1–LO–OR–P3 – ОВ 4-го и 3-го ТЭД –Р4–Sh – якоря 1-го и 2-го ТЭД.
Замедление от электрического торможения не превышает 0,14 м/с2. Направление тока в якоре
РМ изменяется и крестовина ускорителя под контролем ограничительного реле перемещается с 99-й
позиции в направлений 1-й позиции по мере снижения скорости вагона.
Если во время выбега скорость вагона повысится (например, при движении на спуске), то
увеличится тормозной ток двигателей, при этом контакты ограничительного реле OR разомкнутся. В этом
случае изменится направление тока и направление вращения якоря серводвигателя РМ и крестовина
ускорителя будет перемещаться в сторону увеличения тормозного сопротивления (вводится тормозной
реостат) в тормозном контуре. Это будет продолжаться до тех пор, пока ток не снизится до 25–30 А. Таким
образом, и в случае выбега крестовина ускорителя фиксирует соответствующую позицию в соответствии
со скоростью вагона (большей скорости вагона соответствует более высокая позиция ускорителя).
68.
Трамвай типа Татра Т-3BL
1
LS
13
4
MK 2
3
5
Z2
P1
F2
2
4
15
F4
MDR
P3
OR
10
11
12
LO
MDR
3
Z3
Z4
18
16
F3
P4
F1
20
14
A
Sh
17
3
Z1
P2
1
2
4
B1
8
25
Торможение
26
6
B2
9
1
M1
16
M2
Движение
R1 23
ZR
22
R2 100
69.
Трамвай типа К-1Электропривод КПТТ-1 предназначен для регулирования
режимов
работы
(безреостатный
пуск,
ослабление
поля,
рекуперативное торможение с замещающим реостатным) и
обеспечения плавного пуска и электродинамического торможения
вагона трамвайного.
ЭП осуществляет импульсное регулирование напряжения
и тока возбуждения ТЭД при следующих режимах работы трамвая в
эксплуатации:
- движения трамвая с различными скоростями в
диапазоне от 5 до 70 км/ч;
- движение трамвая в режиме «выбег»;
- плавное рекуперативное торможение при наличии
подключенного к контактной сети потребителя;
- реостатное - при отсутствии потребителя.
При этом тот или иной вид
торможения обеспечивается в зависимости от
указанных
условий
автоматически,
без
необходимости
ручного
вмешательства
водителя.
ЭП обеспечивает пуск трамвая при
наличии
отрицательной
ЭДС
электродвигателей величиной до 50 В (режим
отката до 1,5 км/ч).
Схемой ЭП также предусмотрены
электронные устройства защиты и контроля
при
различных
отклонениях
питающего
напряжения контактной сети (превышение,
снижение, полное отсутствие).
70.
Трамвай типа К-1Схема ЭП включает в себя следующие основные узлы:
• разъединитель-заземлитель (U7);
• основной линейный контактор с электромагнитным расцепителем тока КМ11 (блок линейного
контактора);
• вспомогательный линейный контактор КМ0З;
• реактор (дроссель) входного
фильтра LF;
Блок ИП-В
• тормозные и балластные
резисторы силовой цепи,
VT1
резистор стрелки (R1, R2, R4, R5,
R10
R10);
R20
13
• ТЭД М1, М2.
R4
• блок ИП-А, ИП-В.
KM03
KL2
KL3
LF
Управление блоками
ИП-А, ИП-В
осуществляется от
блока управления.
KL1
M1
KM
5
3
1
OBM1
KM11
R5
КР
КТ
KL3
M2
KL2
ВПН
VD5.1 VD5.2
VD4
K07
R9
Блок ИП предназначен для
регулирования режимов работы ТЭД
одной тележки трамвайного вагона с
целью обеспечения плавного
безреостатного пуска и
рекуперативно-реостатного
торможения.
VT2
OBM2
CF1...CF4 +
U7
TA
F1
8
R1
VT3
9
VD1
R2
VD6
CF5...CF8
+
71.
Трамвай типа К-1Схема ИП содержит следующие основные элементы:
• транзистор регулятора напряжения (РН) VТ2;
• транзистор управления возбуждением электродвигателей (РП) VТ1;
• транзистор управления реостатным торможением VТЗ;
• фильтр СF1...СF8;
• контактор КL1 предназначенный для отключения блока ИП;
• контакторы КL2, КLЗ для переключения направления движения;
• вспомогательный преобразователь напряжения (ВПН);
• датчик тока (ТА);
• контакторы КМ, КР, КТ для переключения режимов работы;
• платы формирователей импульсов;
• узел питания цепей управления блока ИП;
• RCD - цепи, предохраняющие полупроводниковые приборы от перенапряжений;
• F1 предохранитель.
Работа блока ИП при пуске.
Режим пуска начинается после нажатия педали блока контроллера хода БКВХ.
При пуске включение ТЭД через блок ИП осуществляется после замыкания контакторов КМ11,
КМ0З, KL1, КМ.
Вначале подаются управляющие импульсы на транзистор VТ2. В момент открытого состояния
транзистора VТ2 ток ТЭД нарастает и протекает по цепи КL1, КМ , параллельно - ОВМ1 , ОВМ2 , R5 и R4 ,
при движении вперед - КL2 , М1 , М2 , КL2 , при движении назад - КLЗ , М2, М1 , КLЗ , F1 , ТА , VТ2 , минус
сети . В момент закрытого состояния транзистора VТ2 ток ТЭД замыкается через диодный модуль VD5.
Благодаря энергии, накопленной в обмотках ток в ТЭД не спадает до нуля .
Описанный режим соответствует минимальной величине пускового тока с ослаблением поля
λ=0.7 и необходим для выбора люфтов в механической передаче. После возрастания тока до 25-35 А блок
управления выдает сигнал на включение контактора КР . Резистор R5 выводится из цепи.
72.
Блок ИП-ВVT1
R10
R20
13
R4
LF
KM03
KL2
KL1
KM
5
3
1
OBM1
KM11
R5
KL3
TA
F1
8
VT2
OBM2
КР
CF1...CF4 +
КТ
U7
M1
KL3
M2
KL2
ВПН
VD5.1 VD5.2
VD4
K07
R9
R1
VT3
9
VD1
R2
VD6
CF5...CF8
+
73.
Блок ИП-ВVT1
R10
R20
13
R4
LF
KM03
KL2
KL1
KM
5
3
1
OBM1
KM11
R5
KL3
TA
F1
8
VT2
OBM2
КР
CF1...CF4 +
КТ
U7
M1
KL3
M2
KL2
ВПН
VD5.1 VD5.2
VD4
K07
R9
R1
VT3
9
VD1
R2
VD6
CF5...CF8
+
74.
Трамвай типа К-1После этого система управления посредством включения транзистора регулятора напряжения
(РН) VТ2 с ШИМ в течение 0,7-0,8с увеличивает пусковой ток до значения заданного углом нажатия педали
блока контроллера хода БКВХ.
С разгоном трамвая происходит увеличение коэффициента заполнения VТ2 .
При переходе в режим выбега выключаются контакторы КМ, КР и включается контактор КТ.
С целью расширения диапазона рабочих скоростей ИП обеспечивает регулирование тока
возбуждения ТЭД трамвайного вагона.
В качестве регулятора магнитного поля возбуждения (РП) используется транзистор VТ1.
При пуске РП вступает в работу после завершения работы РН, т.е. после увеличения
коэффициента заполнения РН до максимума (α=0,99). После вступления в работу регулятора поля
транзистор регулятора напряжения открывается полностью (α=1).
В режиме пуска РП подключается параллельно обмоткам возбуждения ТЭД.
При включении транзистора VТ1, обмотки возбуждения ТЭД шунтируются, и ток вытесняется из
них через токоограничиваюший резистор R10 в транзистор VТ1.
После выключения транзистора VТ1 ток шунтовой цепи будет протекать по резистору R4.
Изменением соотношения времени включенного и выключенного состояния транзистора (коэффициента
заполнения импульсов) изменяется величина эффективного сопротивления R4 и, следовательно, степень
ослабления поля ТЭД.
После завершения работы РП , ТЭД выходит на режим максимального ослабления поля. При
этом транзистор VТ1 открывается полностью (α=1).
При повышении тока в ТЭД сверх величины задания, РП снова автоматически вступает в
работу. Регулятор напряжения вступает в работу только после повторного задания пускового режима.
В режиме пуска частота работы РН и РП остается постоянной, равной 800 Гц, что
обеспечивается схемой управления.
Комбинированная защита по снижению перенапряжений силовых полупроводниковых приборов
выполнена на RCD - цепях и RС - цепях.
75.
Блок ИП-ВVT1
R10
R20
13
R4
LF
KM03
KL2
KL1
KM
5
3
1
OBM1
KM11
R5
KL3
TA
F1
8
VT2
OBM2
КР
CF1...CF4 +
КТ
U7
M1
KL3
M2
KL2
ВПН
VD5.1 VD5.2
VD4
K07
R9
R1
VT3
9
VD1
R2
VD6
CF5...CF8
+
76.
Трамвай типа К-1Работа блока ИП в режиме торможения
Процесс торможения начинается после нажатия педали блока контроллера тормоза БКВТ . В
режиме торможения контакторы КМ, КР выключены. Контактор КТ выключается (на выбеге он включен) и
сразу кратковременно включается на <1 с. На это время он своими контактами подключает ВПН в цепь
обмоток возбуждения для создания начального магнитного потока.
Управляющие импульсы подаются на транзистор VТ2 . При отсутствии тока якоря коэффициент
заполнения увеличивается до максимального значения α=0,99 . В этом режиме система управления
включает транзистор VТ1 с коэффициентом заполнения α=1. Происходит процесс самовозбуждения ТЭД.
Через обмотку возбуждения протекает ток по цепи: положительный вывод ВПН, КТ,
параллельно R5 и обмотка возбуждения ОВМ2,ОВМ1, параллельно R4 и R10, VТ1, 8 отрицательный вывод
ВПН . Ток якорей возрастает по цепи М1 , М2, КL2, F1, ТА, VТ2, VD4, К07, параллельно R5 и ОВМ2, ОВМ1,
параллельно R4 и R10, VТ1, КL2 ,М1.
По мере возбуждения ТЭД происходит нарастание тока в цепи якоря. После возрастания тока
якоря ТЭД до 25-35 А контактор КТ выключается . Если ток не возрастет до указанного значения в течении
1 с контактор также отключается. После этого система управления посредством ШИМ регулирования
транзисторами VТ1, VТ2 с постоянной частотой 800 Гц ± 5% за 0,7-0,8с увеличит ток ТЭД до значения
заданного углом нажатия педали блока контроллера тормоза БКВТ .
В режиме торможения, параллельно обмотке возбуждения ТЭД включен балластный резистор
R5, который вводится в цепь ТЭД с целью обеспечения устойчивости работы рекуперативного режима в
случаях, когда напряжение на ТЭД может превысить напряжение в контактной сети.
В момент открытого состояния транзисторов VT1, VТ2 ток ТЭД нарастает и протекает по цепи
М1, М2, КL2, F1, ТА, VТ2, VD4, К07, параллельно R5 и ОВМ2 ,ОВМ1, параллельно R4 и R10 , VТ1, КL2 , М1.
В момент закрытого состояния транзисторов VТ1, VТ2 ток ТЭД постепенно спадает и замыкается по цепи
М1, М2, КL2, F1, ТА, VD5, КL1, КМ0З, LF, КМ11, разъединитель-заземлитель, пантограф, контактная сеть,
потребитель, минус контактной сети, VD4, К07, параллельно R5 и ОВМ2, ОВМ1, R4, КL2, М1. Идет
рекуперация энергии в сеть . При отсутствии потребителей в сети или их недостаточной мощности энергия
вырабатываемая ТЭД накапливается в конденсаторах фильтра СF1...СF8.
77.
Блок ИП-ВVT1
R10
R20
13
R4
LF
KM03
KL2
KL1
KM
5
3
1
OBM1
KM11
R5
KL3
TA
F1
8
VT2
OBM2
КР
CF1...CF4 +
КТ
U7
M1
KL3
M2
KL2
ВПН
VD5.1 VD5.2
VD4
K07
R9
R1
VT3
9
VD1
R2
VD6
CF5...CF8
+
78.
Блок ИП-ВVT1
R10
R20
13
R4
LF
KM03
KL2
KL1
KM
5
3
1
OBM1
KM11
R5
KL3
TA
F1
8
VT2
OBM2
КР
CF1...CF4 +
КТ
U7
M1
KL3
M2
KL2
ВПН
VD5.1 VD5.2
VD4
K07
R9
R1
VT3
9
VD1
R2
VD6
CF5...CF8
+
79.
Трамвай типа К-1Работа блока ИП в режиме торможения
При превышении напряжения на конденсаторах СF1... СF8 уровня 720В блок управления выдает команду
на включение транзистора VТЗ и ток замыкается через резисторы R1 , R2 на минус контактной сети.
Энергия гасится на резисторах. Переход с реостатного на рекуперативное торможение и обратно
происходит автоматически в зависимости от напряжения на конденсаторах фильтра. Таким образом
осуществляется режим следящего рекуперативного торможения .
Импульсный преобразователь поддерживает постоянный ток в ТЭД вплоть до очень низких
скоростей . На малой скорости тормозной ток в ТЭД уменьшается, и если тормозная педаль блока БКВТ
нажата на угол >22° выключается реле К07 (не входит в состав КПТТ-1) (скорость примерно Зкм/ч). По
сигналу от контакта этого реле включается механический тормоз.
Механический тормоз работает на двух ступенях. Сигнал на включение первой ступени выдает
блок управления в зависимости от состояния системы управления ЭП . Условием для включения первой
ступени служит возрастание коэффициента заполнения импульсов транзисторов регуляторов напряжения
до значения близкого к максимальному (наступает на малых скоростях), либо отказ электродинамического
тормоза в обеих тележках. При срабатывании защиты от юза блокируется в схеме блока управления
включение первой ступени механического тормоза.
Вторая ступень механического тормоза вступает в работу после снижения тормозного тока,
после выключения реле К07. Трамвайный вагон будет тормозить полным воздействием механического
тормоза (вторая ступень) в том случае , если водитель нажимает педаль блока контроллера тормоза БКВТ
на угол > 22° (за 2° до положение «Стоянка»)). Поэтому необходимо, чтобы водитель при каждой остановке
нажал тормозную педаль до положения «Стоянка», в котором она фиксируется.
В случае выхода из строя электродинамического тормоза на обеих тележках весь тормозной
момент берет на себя механический тормоз с эффективностью своей первой ступени при нажатии
тормозной педали на угол <22°, и эффективностью своей второй ступени при угле нажатия >22°.
80.
Блок ИП-ВVT1
R10
R20
13
R4
LF
KM03
KL2
KL1
KM
5
3
1
OBM1
KM11
R5
KL3
TA
F1
8
VT2
OBM2
КР
CF1...CF4 +
КТ
U7
M1
KL3
M2
KL2
ВПН
VD5.1 VD5.2
VD4
K07
R9
R1
VT3
9
VD1
R2
VD6
CF5...CF8
+
81.
Трамвай типа К-1Работа ЭП при юзе/буксовании
Определение проскальзывания или юза колес основано на принципе взаимного сравнения
частоты вращения каждой оси колесных пар вагона.
Измерение частоты вращения производится с помощью четырех ТГ ВR1...ВR4 (не входят в
состав ЭП). ТГ приводятся во вращение за счет жесткой механической связи с валом редукторов тележек.
Если при трогании с места на скользких рельсах произойдет проскальзывание колес, то узел
защиты от проскальзывания снизит пусковой ток в ЭД соответствующей тележки. При возобновлении
нормального качения колес ток в ТЭД с заданной крутизной возрастет опять до исходного значения.
Если работа защиты от проскальзывания в передней или задней тележках повторяется за
короткий промежуток времени несколько раз, то система защиты от проскальзывания снизит заданное
значение тока пуска обеих тележек.
После окончания серии проскальзываний требуемое значение тока разгона с заданной
крутизной опять повысится до исходного значения. Каждое включение защиты от проскальзывания в блоке
управления сигнализируется световым индикатором на пульте управления вагона.
Если возникнет юз колесной пары при торможении, система защиты от юза проведет
аналогичные, описанные выше, операции, т.е. скачком снизит ток торможения в соответствующей тележке,
а в случае серии юзов плавно снизит ток торможения обеих тележек и при снижении до минимального
значения блок управления замкнет цепь катушки реле К04, контакты которого:
• включают рельсовый тормоз задней тележки для компенсации сниженной эффективности
динамического тормоза;
• снижают ток размыкания реле К07;
• вводят в действие механизм посыпки песком, с целью повышения коэффициента трения.
Защита от юза воздействует только на электродинамический тормоз и поэтому не влияет на
аварийное торможение. При срабатывании защиты от юза в схеме блока управление блокируется
включение первой ступени механических тормозов. Если первая ступень механического тормоза
включилась и затем произошел юз, то включение защиты против юза блокируется схемой блока
управления.
Защиту от проскальзывания можно путем нажатия кнопки на пульте водителя временно
исключить из действия, в то время как защиту от юза выключить невозможно .
82.
ЗиУ-9 (ЗиУ-682)На троллейбусе ЗиУ-9 установлен ТЭД с кремнийорганической
изоляцией ДК-210А-3 мощностью 110 кВт. Он имеет смешанное
возбуждение с преобладанием магнитного поля последовательной ОВ. Его
скоростная характеристика при полном возбуждении пересекает ось
ординат при скорости около 43 км/ч. Это позволяет проводить повторные
пуски при полном возбуждении, не опасаясь рекуперативного торможения.
Выводятся ступени пускового реостата и ступни регулировочного реостата ослабления
возбуждения последовательной обмотки с помощью группового реостатного контроллера ЭКГ-20Б.
Реостатный контроллер имеет 12 силовых кулачковых контакторов КЭ-52 (КЭ-61), 8 кулачковых
контакторов КЭ-42, включенных в цепь управления, и один переключающий кулачковый контактор КЭ-54 с
контактами РКМ, которое замыкаются между позициями, и РКП, замыкающимися на позициях. Реостатный
контроллер имеет 18 позиций и серводвигательный привод с двумя обмотками возбуждения: одна обмотка
работает при пуске «Вперед», другая – при возвращении вала реостатного контроллера на первое
положение «Назад».
В электрической схеме работа силовых контакторов предусматривается только на замыкание,
поэтому силовые контакторы выполнены без дугогашения. При электрическом реостатном торможении
троллейбуса реостатный контроллер не используется. Для гашения энергии при электрическом реостатном
торможении используют отдельный нерегулируемый резистор, поэтому реостатное торможение можно
осуществлять, не дожидаясь возвращения реостатного контроллера на 1-ю позицию. Этот резистор
применяют также в начале пуска для снижения вращающего момента на валу якоря ТЭД при выборе
люфтов в механической передаче.
Силовая цепь при тяговом и тормозном режимах ТЭД включается пятью контакторами КПП-113.
Переключения в параллельной ОВ ТЭД выполняются контакторами КПД-110.
Автоматический пуск троллейбуса осуществляется под контролем реле ускорения Р-52Б,
которое имеет три катушки – основную намагничивающую, включенную в цепь якоря ТЭД, регулировочную
и подъемную (подмагничивающую), включенные в цепь управления. Катушки включены согласно.
83.
ЗиУ-9 (ЗиУ-682)Режим работы троллейбуса задается с помощью контроллера управления КВП-22Б, который
имеет нулевое, маневровое и три ходовых положения. Электрические цепи троллейбуса позволяют
осуществлять следующие режимы работы: движение на маневровом положении, нормальный
автоматический разгон, движение с различными скоростями, реверсирование, электрическое торможение
с регулировкой тормозного усилия. Выход на любую фиксированную позицию, заданную контролером
управления, происходит под контролем реле ускорения. Водитель в зависимости от условий движения
имеет возможность выполнять автоматический пуск троллейбуса с различными ускорением.
Принципиальная электрическая схема цепей напряжением 550 В
84.
ЗиУ-9 (ЗиУ-682)Таблица включения контакторов троллейбуса ЗиУ-9152
85.
ЗиУ-9 (ЗиУ-682)Подготовка
схемы
к
работе.
Перед
приведением схемы в рабочее состояние включают
аккумуляторную
батарею
выключателем
А2,
цепь
управления – выключателем ВУ1 и при нажатой кнопке ПСІ
проверяют порядок включения контакторов (секвенцию) и
работу ЭП реостатного контроллера. Далее выполняют
следующие операции для подготовки схемы к работе:
устанавливают токоприемники ТІ и Т2 на контактное
провода; выключателями ВВЦ1 и ВВЦ2 включают цепь
вспомогательного двигателя ДВ, при этом реле нулевое,
сработав, замкнет контакты РН в цепи втягивающих катушек
линейных контакторов ЛК1 и ЛК2 и разомкнет контакт РН в
цепи звонка ЗОТ; выключателем ВУ2 включают в цепь
звуковой сигнализации отсутствия напряжения в контактной
сети (ЗОТ); выключателями ВУК и ВВЦЗ включают цепь
двигателя компрессора ДК и выключателем А1 – цепь ЭП
усилителя
руля.
После
наполнения
компрессором
пневмосистемы воздухом устанавливают рукоятку реверсора
в положение, соответствующее намеченному направлению
движения («Вперед» или «Назад»).
При необходимости включают электропечи салона и кабины
выключателями В8, В28 и ВВЦ4; а в вечернее время – освещение салона, подножек,
габаритные и маршрутные указатели.
Затем включают автоматический выключатель АВ
и троллейбус готов к движению.
86.
ЗиУ-9 (ЗиУ-682)Автоматический пуск и регулирование скорости. Пуск и автоматический разгон двигателя
осуществляют нажатием ходовой педали контроллера управления с установкой ее на любое положение,
характеризующее конечную скорость движения троллейбуса.
При установке ходовой педали на маневровое положение реостатный контроллер остается на 1-й позиции. В цепи управления
замыкаются кулачковые контакторы контроллера хода КВМ-3 в проводах 5–7, КВМ-3 в проводах 11–12 и КВМ-1 в проводах 5–26. По цепи: плавкий
предохранитель Пр2 – выключатель управления ВУ1 – провод 5 – кулачковый контактор реостатного контроллера РК1 – провод 11 – кулачковый
контактор КВМ-3 – провод 12 – кулачковый контактор тормозного контроллера ТКО – провод 13 – размыкающий контакт контактора Т – провод 14 –
размыкающий контакт реле перегрузки РТ – провод 15 – замыкающий контакт реле нулевого РН – провод 16 получают питание втягивающие катушки
линейных контакторов ЛК1 и ЛК2. Одновременно по цепи провод 12 – кулачковый контактор РК1–13 – провод 18 получает питание втягивающая
катушка контактора Ш1. И по цепи кулачковый контактор КВМ-1 – провод 26 ток идет в регулировочную катушку реле ускорения РУ2.
При включении линейных контакторов ЛК1 и ЛК2 в силовой цепи ток идет: от токоприемника Т1
через реактор помехоподавления РР1, автоматический выключатель АВ, силовые контакты контактора
ЛК1, катушку реле перегрузки РТ, контакты реверсора В1, тормозной реостат Р12–РІЗ–Р21, обмотку
возбуждения дополнительных полюсов и якорь тягового двигателя ТД, силовую катушку реле ускорения
РУ1, катушку реле минимального тока РМТ, шунт ШС1 амперметра А, контакты реверсора В2, силовые
контакты реостатного контроллера РК7, пусковой реостат Р2—Р1—РЗ—Р4—Р5—Р6—Р7—Р10, обмотку
последовательного возбуждения ТЭД С11—С21, силовые контакты контактора ЛК2, реактор РР2 и,
наконец, токоприемник Т2.
Ток по параллельной ОВ ТЭД идёт: от токоприемника Т1 (по ранее рассмотренной цепи РР1–
АВ–ЛК1–РТ–В1–Р12–Р13), далее через регулировочный реостат РІЗ—Р14, обмотку параллельного
возбуждения Ш11—Ш21, контакты контактора Ш1, выключатель ВВЦ2, реактор РР2 и затем токоприемник
Т2. Одновременно ток идет через разрядный резистор РІ4—Р15, подключенный параллельно ОВ Ш1—Ш2.
В цепи якоря ТЭД будет небольшой ток (сопротивление реостата составляет 6,482 Ом) и двигатель создает
вращающий момент на валу порядка 220—230 Н∙м, достаточный для выбора люфтов в механической
передаче, но неспособный сдвинуть троллейбус с места.
Далее включается линейный контактор ЛКЗ и выводит из цепи якоря ТЭД тормозной реостат
Р12—РІ3—Р21. Сопротивление реостата, включенного в силовую цепь, снизится до 4,612 Ом и
вращающий момент ТЭД будет достаточен для маневровой работы троллейбуса. Маневровая позиция
контроллера хода предназначена для работы троллейбуса в парке или в местах скопления транспорта при
движении со скоростью 8–10 км/ч.
87.
ЗиУ-9 (ЗиУ-682)При установке пусковой педали на 1-е ходовое положение (X1) включается цепь серводвигателя
СД. Якорь серводвигателя получает питание.
Серводвигатель через редуктор поворачивает вал реостатного контроллера на 2-ю, 3-ю и
последующие позиции, постепенно выводя пусковой реостат из цепи тягового двигателя. При этом
напряжение на ТЭД, а следовательно, и скорость движения троллейбуса увеличиваются.
На 2-й позиции замыкается силовой кулачковый контактор реостатного контроллера РК1 и из
цепи ТЭД выводится ступень Р1–РЗ, сопротивление пускового реостата уменьшается до 3,382 Ом. С 3-й
по 7-ю позицию поочередно замыкаются кулачковые контакторы РК.2, РКЗ, РК4, РК5, РК8 и соответственно
выводят ступени РЗ—Р4, Р4—Р5, Р5—Р6, Р6— Р7, Р2—Р1. Сопротивление реостата снижается при этом
соответственно до значений 2,55, 1,912, 1,572, 1,232, 0,924 Ом. На 8-й позиции реостатного контроллера
кулачковый контактор РК7 размыкается, а РК9 замыкается, включая параллельно ступени Р7–Р10 и Р7–
Р1. Сопротивление реостата уменьшается до 0,725 Ом.
С 9-й по 11-ю позицию реостатного контроллера поочередно замыкаются кулачковые
контакторы РК2, РКЗ, РК4 и шунтируют соответственно ступени Р4–Р1, Р5–Р1, Р6–Р1. Сопротивление
реостата будет соответственно 0,543; 0,391; 0,248 Ом. На 12-й позиции снова замыкается кулачковый
контактор РК7, подключая параллельно ступень Р2–Р1. Ток через пусковой реостат идет по трем
параллельным ветвям и сопротивление реостата составляет 0,138 Ом. На 13-й позиции в цепи управления
замыкается кулачковый контактор реостатного контроллера РК13-18 в проводах 16–17 и включает цепь
втягивающей катушки линейного контактора Р. При включении линейного контактора Р пусковой реостат
полностью выводится из силовой цепи согласно таблице включения контакторов и ТЭД начинает работать
по автоматической характеристик с полным возбуждением.
На 14-й позиции в цепь параллельной ОВ ТЭД вводится резистор Р15–Р16 сопротивлением 400
Ом и ток в этой цепи снижается с 1,67 до 0,3 А, создается первая ступень ослабления возбуждения ТЭД,
вследствие чего скорость движения троллейбуса увеличивается.
На 15-й позиции реостатного контроллера подключается параллельно последовательной
обмотке возбуждения С11–С21 регулировочный реостат Р19–Р20А и последовательно включенную с ним
токовую катушку РН2. Происходит ослабление возбуждения последовательной обмотки ТЭД на 28%.
88.
ЗиУ-9 (ЗиУ-682)Пятнадцатая позиция реостатного контроллера является первой фиксированной ходовой
позицией, соответствующей 1-му ходовому положению педали контроллера управления. Отключается
питание якоря серводвигателя СД, образуется тормозной контур для якоря серводвигателя.
Серводвигатель, замкнутый накоротко, остановится, фиксируя кулачковый вал реостатного контроллера на
15-й позиции.
Для увеличения скорости троллейбуса следует установить пусковую педаль на 2-е или 3-е
ходовое положение. На 2-м ходовом положении педали замыкается кулачковый контактор КВ2
контроллера хода в проводах 5–41 цепи управления и размыкается кулачковый контактор КВМ-1 в
проводах 5–26, разрывая цепь питания катушки стоп-реле СР.
Включается питание якоря серводвигателя, и вал реостатного контроллера повернется на 16-ю
и 17-ю позиции. На этих позициях выводится из регулировочного реостата резисторы Р22А–Р22, затем
Р22–Р20. Происходит ослабление возбуждения тягового двигателя сначала на 47%, а затем на 60%.
При установке пусковой педали на 3-е ходовое положение вал реостатного контроллера
поворачивается на 18-ю позицию. Замыкается силовой кулачковый контактор РК12, шунтируя ступени
Р19–Р22А–Р22–Р20 регулировочного реостата. Происходит ослабление последовательного возбуждения
двигателя на 69%. Эта позиция соответствует 3-му ходовому положению педали..
Частоту вращения вала реостатного контроллера регулирует реле ускорения. На 1-м ходовом
положений реле ускорения поддерживает минимальное значение тока в ТЭД около 150–170 А.
В зависимости от условий движения, числа пассажиров в салоне и состояния дорожного
покрытия пуск троллейбуса можно осуществлять с различным ускорением. Наименьшее ускорение на 1-м
ходовом положении, на котором пуск осуществляются при токе 150–170 А. Если после маневрового
положения перевести ходовую педаль на 2-е или 3-е ходовое положение, минуя 1-е, ток регулирования
реле ускорения становится 250–280 А. При этом пуск троллейбуса будет происходить с большим
ускорением.
Наибольшая допустимая скорость троллейбуса с нормальной нагрузкой на горизонтальном
участке дороги 68 км/ч. Среднее ускорение при нормальной нагрузке и напряжении в контактной сети 550
В на горизонтальной площадке при разгоне составляет 1,3 м/с2. Во время пуска троллейбуса водитель
может постепенно переводить педаль контроллера хода или сразу ставить ее в выбранное положение,
например, 3-е.
89.
ЗиУ-9 (ЗиУ-682)Отключение силовой цепи и выбег. При отпускании ходовой педали в нулевое положение
выключаются все кулачковые контакторы КВ контроллера хода. При выключении контактора ЛКЗ в цепь
якоря ТЭД вводится тормозной реостат Р12–РІЗ–Р21. Через 0,5–0,7 с после отключения контактора ЛКЗ
контакторы ЛК1 и ЛК2 отключают силовую цепь. Т.о., перед отключением ТЭД от контактной сети
предварительно вводится резистор, снижающий ток. При этом облегчается гашение дуги на контактах
контакторов ЛК1 и ЛК2 и обеспечивается более плавный переход с тяги на выбег. Это особенно важно при
переходе на выбег во время пуска троллейбуса, когда ускорение меняется от максимального до некоторого
отрицательного значения, определяемого сопротивлением движению.
Частота вращения вала реостатного контроллера назад выше, чем при пуске троллейбуса с
остановки, т. е. обеспечивается ускоренный возврат вала реостатного контроллера на исходное
положение.
Электрическое торможение (реостатное). Во время электрического торможения ТЭД работает
в генераторном режиме, а вырабатываемая им электроэнергия гасится в тормозном реостате.
Электрическая схема троллейбуса предусматривает две позиции служебного реостатного торможения.
После установки тормозной педали контроллера управления на 1-е положение силовая цепь
ТЭД отключается от контактной сети.
Включается контактор Т, силовыми контактами замыкает цепь якоря ТЭД на тормозной реостат
Р12–РІЗ–Р21. Ток в параллельную ОВ ТЭД идет по следующей цепи: токоприемник ТІ – реактор
помехоподавления РР1 – автоматический выключатель АВ–контакты контактора ШЗ – резисторы Р21–РІЗ–
Р14 – обмотка возбуждения Ш11–Ш21 и параллельно включенными ей разрядный резистор Р14–Р15 –
резистор Р15–Р16 – выключатель ВВЦ2 – реактор РР2 – токоприемник Т2. Включением контактора Ш1
выводится резистор Р15–Р16, что приводит к увеличению тока возбуждения и тормозного тока. Якорь ТЭД
вращается под действием механической энергии, запасенной троллейбусом при движении. Обмотка якоря
пересекает магнитное поле, создаваемое параллельной ОВ двигателя, и в ней наводится э. д. с. Двигатель
переходит в генераторный режим. Происходит торможение троллейбуса. Тормозной ток идет по силовой
цепи: от якоря ТД через обмотку дополнительных полюсов, тормозной реостат Р21–РІЗ–Р12, контактор Т,
шунт амперметра А1, катушки реле минимального тока РМТ и реле ускорения РУ1, на якорь ТЭД.
90.
ЗиУ-9 (ЗиУ-682)Схема электрических цепей троллейбуса обеспечивает зависимость магнитного поля
возбуждения от тока в тормозном контуре, так как ток ОВ проходит через стабилизирующий резистор Р21–
РІЗ. С увеличением тормозного тока увеличивается падение напряжения на этом резисторе и,
следовательно, уменьшается ток в параллельной ОВ Ш11–Ш21. Уменьшение тормозного тока вызывает
увеличение возбуждения, т. е. получается такая же зависимость, как у генератора встречно-смешанного
возбуждения.
При установке тормозной педали на 2-е положение включается контактор Ш2, выводится
резистор РІЗ–Р14 из цепи возбуждения, что увеличивает ток возбуждения и, следовательно, тормозной ток
и тормозную силу. Электрическое реостатное торможение позволяет снизить скорость троллейбуса до 5–7
км/ч. При более глубоком нажатий тормозной педали на реостатный тормоз накладывается механический
тормоз, имеющая пневматический привод.
После сброса тормозной педали в нулевое положение контактор ШЗ включается и отключает
цепь параллельной обмотки возбуждения. Магнитное поле ТЭД исчезает. Через 0,5–0,7 с снимается
напряжение с втягивающей катушки контактора Т (т.о., контактор Т разрывает уже обесточенный тормозной
контур силовой цепи).
Защита электрооборудования. Для защиты электрооборудования троллейбуса от коротких
замыканий предусмотрен автоматический выключатель АВ-8А-1. Он установлен в общей цепи и выключает
силовую цепь при увеличении тока в ней свыше 500 А.
Защиту электрооборудования силовой цепи от перегрузки осуществляет реле максимального
тока РТ. Когда ток в силовой цепи станет выше 450 А, отключатся контакторы ЛК1, ЛК2 и Р от источника
питания. Линейные контакторы ЛК1, ЛК2 и Р выключатся и отключат силовую цепь от контактной сети.
Для защиты ТЭД от толчков тока при кратковременных перерывах питания силовой цепи служит
реле нулевого напряжения РЗВ-821. Оно регулируется на напряжение срабатывания 350–380 В.
При срабатывании реле РН и при срабатывании реле перегрузки РТ, силовая схема собирается
только после установки контроллера хода в нулевое и затем в 1-е ходовое положение и возврата вала
реостатного контроллера на 1-ю позицию, т. е. после введения в цепь ТЭД пусковых реостатов.
91.
ЮМЗ Т292.
ElectroLAZ-1293.
ElectroLAZ-12Мотоотсек
94.
Состояние и перспективы развития электротрансмиссий для электрического и гибридного транспорта на 2015 годРоссийские проекты
Анучин А.С., Козаченко В.Ф.,
Лашкевич М.М., Остриров В.Н., Русаков А.М.
Из мировых тенденций следует выделить: применение гибридного и электрического транспорта в
системе распределенной генерации энергии; продолжающаяся, но пока безуспешная, разработка моторколес для автомобилей; работы по оптимизации топологий и алгоритмов работы тягового
электрооборудования, исследования в области использования топливных элементов, аккумуляторов и
супер-конденсаторов для накопления энергии. В качестве сдерживающих факторов здесь следует отметить
слабую заинтересованность в модернизации отработанных, но не лучших решений. В России в последний
год намечен курс на модернизацию и увеличение эффективности существующего парка транспортных
средств. Снижение стоимости за счет перехода к отечественным комплектующим или хотя бы сборкам
силовой и управляющей электроники.
В настоящее время российских проектов, связанных с разработкой гибридных и полностью
электрических трансмиссий достаточно много. Однако многие из этих проектов либо развалились, либо
оказались укомплектованы импортным оборудованием, что в условиях сложившейся экономической
ситуации привело к их существенному удорожанию и фактически прекращению производства. К таким
решениям можно отнести Уральские локомотивы и электромобиль Lada Ellada.
В электровозах используется электропривод фирмы Siemens. Решение базируется на тяговом
асинхронном электродвигателе и силовом преобразователе, выполненном на IGBT с номинальным
напряжением 6,6 кВ по схеме 3-фазного шестиключевого инвертора, питаемого от контактной сети 3 кВ.
Решение нельзя назвать эффективным и современным, так как частота коммутации транзисторов
ограничена, что неизбежно должно приводить к возникновению паразитных гармоник как в цепях питания,
так и в двигателе. Наличие паразитных составляющих может оказывать влияние на системы автоведения
поездов и путевую автоматику и требует установки дополнительных массивных сетевых фильтров.
Конечно, электровоз сам по себе нуждается в балласте, но сетевой дроссель в любом случае получается
дороже простого груза. Наличие высших гармоник в выходном токе неизбежно влияет на КПД двигателя.
Оптимальной для данного уровня напряжения (3 кВ) в настоящее время могла бы стать схема трехуровневого
инвертора, которая может использовать последовательное соединение IGBT с номинальным напряжением 3,3 кВ. В этом
случае частота коммутаций может быть несколько выше, чем для IGBT на 6,6 кВ, а применение 3-х уровневого инвертора
вместе с удвоением эффективной частоты коммутации ключей в стойке позволяет качественно формировать ток в обмотках
электрической машины, а пульсация мощности по входу преобразователя снизится на порядок.
95.
Состояние и перспективы развития электротрансмиссий для электрического и гибридного транспорта на 2015 годРоссийские проекты
Анучин А.С., Козаченко В.Ф.,
Лашкевич М.М., Остриров В.Н., Русаков А.М.
Касаемо электромобиля Лада ситуация оказалась еще сложнее, так как ЭП строится целиком
на импортных компонентах, при этом его цена становится определяющей в стоимости автомобиля.
Стоимость остального «железа» составляет не более 30%. Тяговый ЭП выполнен на асинхронном
двигателе и производится швейцарскими фирмами MES и Бруса. Аккумуляторы закупаются в Китае. В
связи с падением курса рубля стоимость только электрической части превысила 500 тыс. руб., что делает
автомобиль недоступным для целевой аудитории автомобилей Лада, хотя увеличение стоимости
автомобиля должно окупиться примерно за 5 лет при пробеге в 25 000 км/год с учетом экономии не только
на бензине, но и на парковке, транспортом налоге и т.д.
Другая система с асинхронным ЭП устанавливается на троллейбусы и уже долгое время
успешно эксплуатируется. Здесь недостатков значительно меньше. С другой стороны, представим себе Жигули
2107, который мы хотим сделать современным гибридным автомобилем. Для этого вместо бензинового двигателя установим
гибридную силовую установку, бензобак частично заменим суперконденсаторами. Автомобиль поехал, но что-то не так. Он
остался по-прежнему старым и не удовлетворяет нашим эстетическим требованиям, проигрывает по аэродинамической
эффективности и комфорту подвески. Именно так воспринимается решение с заменой тягового электродвигателя
постоянного тока на троллейбусах асинхронным частотным регулированием. Механический дифференциал «уродует»
современный троллейбус. Он не позволяет опустить пол в районе задних колес; системы помощи водителю могут
вмешиваться только посредством механических тормозов.
Эффективным может быть лишь решение, гармонично объединяющее все лучшее во всех
областях - кузов, подвеска, трансмиссия, аэродинамика и эргономика. Модернизация по кусочкам ничего
не дает - техника не может конкурировать с западными аналогами. Подтверждением этому может служить
огромный список недоведенных проектов.
Между тем, разработки тягового ЭП выполняются и собственными силами. В НИР «Крымск»
впервые были применены вентильно-индукторные двигатели с независимым возбуждением (не путать с
вентильно-индукторными двигателями с самовозбуждением или SRD в англоязычной литературе). Трансмиссия построена по схеме «мотор
— полуось». В процессе испытаний макетный образец транспортного средства достиг максимальной скорости 97 км/ч,
преодолел подъем 30 градусов на бетонном покрытии, произвел разворот на месте на сухом асфальте с радиусом разворота
3,8 метра. Были проверены все специальные режимы работы: движение «от молекулярного накопителя» с заглушенным
ДВС, запуск ДВС от генератора, режим «торможения дизелем», накопление энергии торможения в молекулярный
накопитель.
96.
Состояние и перспективы развития электротрансмиссий для электрического и гибридного транспорта на 2015 годРоссийские проекты
Схема последовательного гибрида на
примере трансмиссии НИР «Крымск»
Анучин А.С., Козаченко В.Ф.,
Лашкевич М.М., Остриров В.Н., Русаков А.М.
Гибридный тягач ОКР «Платформа-О»
с мотор-колесами по формуле 16х16
97.
Состояние и перспективы развития электротрансмиссий для электрического и гибридного транспорта на 2015 годЗарубежные проекты
Анучин А.С., Козаченко В.Ф.,
Лашкевич М.М., Остриров В.Н., Русаков А.М.
Среди зарубежных проектов следует выделить победное шествие автомобилей Tesla Motors. К
ним присоединяются другие производители. В качестве основы тягового привода чаще всего
используется асинхронный двигатель. Значительно изменился подход к проектированию данных
электрических машин, так, оригинальным способом производится отвод тепла от ротора. Вал двигателя
полый, с одного конца имеется отверстие, в которое заводится трубка для подвода жидкости. Внешняя
поверхность трубки имеет лопасть в несколько витков на всю длину трубки, обеспечивающую
турбулентное движение охлаждающей жидкости по внутренней поверхности полого ротора. Такая
конструкция позволяет эффективно отводить тепло от ротора, при этом все жидкостные элементы
оказываются расположенными изолировано от электрических частей.
Следует отметить, выдающиеся параметры силовой установки. Вес двигателя составляет всего
68 кг при заявленной мощности от 235 до 416 л.с. в зависимости от исполнения, что для модели с
мощностью 416 л.с. (306 кВт) дает удельную мощность 4,5 кВт/кг. Однако если присмотреться внимательно,
то можно увидеть несколько особенностей. Максимальная скорость ограничена у этой модели на уровне
209 км/ч, хотя характеристика двигателя явно позволяет разгоняться дальше. Это ограничение дает повод
предположить, что мощность заявлена лишь для кратковременного режима работы (разгон/торможение), а
ограничение скорости дается по тепловому режиму. Чтобы оценить реальную мощность в
продолжительном режиме на максимальной скорости воспользуемся имеющимися данными
[https://en.wikipedia.org/wiki/Automobile_drag_coefficient].
Произведение
коэффициента
лобового
2
сопротивления Cx на площадь лобового сечения CxA=0.567м , максимальная скорость Vmax=58м/с,
плотность воздуха при 25º С ρ=1,02041 кг/м2, тогда сопротивление потоку встречного воздуха составит:
1
2
Fвозд C x A Vmax
1150 Н.
2
Трение качения колес можно оценить из коэффициента k=0,014 и массы автомобиля m=2108кг по формуле:
Fтрения kgm 290 Н.
Т.о., с учетом КПД редуктора η≈0,98 мощность на валу двигателя для движения с максимальной скоростью
должна составлять:
Fвозд Fтрения Vmax 85.3
P
кВт.
98.
Состояние и перспективы развития электротрансмиссий для электрического и гибридного транспорта на 2015 годЗарубежные проекты
Анучин А.С., Козаченко В.Ф.,
Лашкевич М.М., Остриров В.Н., Русаков А.М.
Рабочая точка в данном случае будет находиться в зоне ослабления поля, где в длительно
допустимом режиме двигатель может работать с номинальной мощностью. То есть мощность, развиваемая
двигателем в самом тяжелом продолжительном режиме, составляет всего 85,3 кВт с возможной
перегрузкой до 306 кВт. В итоге удельная мощность для продолжительного режима работы составит всего
1,25 кВт/кг при удельной мощности 4,5 кВт/кг для кратковременного режима разгона или торможения.
Стандартный промышленный асинхронный двигатель мощностью 90 кВт имеет удельную мощность около
0,2 кВт/кг, что в 6 раз хуже двигателя автомобиля Tesla, но следует учесть, что в автомобилях Tesla
применяется жидкостное охлаждение вместо воздушного и беличья клетка ротора выполнена из меди
вместо алюминия. Так что подобные показатели достижимы, хотя степень оптимизации и продуманности
трансмиссии в целом с учетом особенностей эксплуатации находятся на высоте. Более полные данные по
испытанию и разбору трансмиссии Tesla Model S доступны в:
http://insideevs.com/video-tesla-model-s-performance-version-dynos-at-368-horsepower/
https://yadi.sk/i/rcNILUTbjkvkA
Вместе с тем, в городской транспорт постепенно проникают тяговые ЭП с СДПМ. Так, на
конференции EPE2014 в гор. Лаппеенранте в одном из пленарных докладов представители компании
Siemens показали прототип автобуса, в котором они сделали «шаг назад», перейдя от схемы с
индивидуальным асинхронным приводом на колесо обратно к системе с дифференциалом и одним
тяговым двигателем — на этот раз синхронным с постоянными магнитами. Диапазон ослабления поля в
двигателе с постоянными магнитами ограничен 1,5 – 2,0, так что данный вид автобуса, скорее всего, может
использоваться лишь в городских условиях, избегая движения по автомагистралям.
Также на различных конференциях в 2015 году было представлено множество докладов по
расчету, разработке и созданию мотор-колес со встроенными двигателями с постоянными магнитами,
однако реальных решений пока не наблюдается. Очевидно, что нерешенными проблемами остаются
неподрессоренная масса и невозможность встроить в данный объем полноценный механический тормоз,
что не позволяет добиться необходимой надежности и сертифицировать изделия.
Все это разнообразие решений требует некоторой систематизации по типам используемых
электрических машин, с тем, чтобы определить области их рационального применения.