




















 Электроника
ЭлектроникаПохожие презентации:









")
Машины постоянного тока
1.
МАШИНЫ ПОСТОЯННОГО ТОКА1. Устройство, принцип действия и области применения
машин постоянного тока
2. Способы возбуждения машин постоянного тока
3. Электродвижущая сила обмотки якоря машины постоянного
тока
4. Электромагнитный момент машины постоянного тока
5. Магнитная цепь машины постоянного тока
6. Реакция якоря машины постоянного тока
7. Потери и КПД машины постоянного тока
8. Характеристики двигателей параллельного возбуждения
9. Характеристики двигателей последовательного
возбуждения
10. Характеристики двигателя смешанного возбуждения
11. Пуск двигателей постоянного тока
12. Регулирование частоты вращения двигателей постоянного
тока
2.
В принципе действия любой электрической машины лежит законэлектромагнитной индукции, который использует две стороны работы
магнитного поля:
1. получение ЭДС в проводнике, движущемся в магнитном поле (принцип
действия генератора);
2. получение электромагнитной силы, действующей на проводник с током
в магнитном поле (принцип действия электродвигателя).
Т.о. для работы электрической машины необходимо соблюдение 3-х
условий:
1. наличие магнитного потока, который создается постоянным магнитом
или током;
2. наличие среды, проводящий электрический ток;
3. относительное изменение магнитного потока и проводящей среды
(генератор) или наличие в проводящей среде электрического тока
(двигатель).
3. МАШИНЫ ПОСТОЯННОГО ТОКА
1.Устройство, принцип действия и области применения машинпостоянного тока
Имеет неподвижную часть - статор и подвижную - ротор.
Рисунок 1.1 Машина постоянного тока:
1— коллектор, 2 — щетки, 3 — якорь,
4— полюс, 5 — обмотка возбуждения,
6 — корпус, 7 — подшипниковые щиты,
8 — вентилятор, 9 — обмотка якоря
Статор включает в себя корпус 6, к корпусу
крепятся полюсы 4, подшипниковые щиты 7
и лапы для крепления машины к фундаменту.
Корпус, являющийся частью магнитопровода,
называется станиной. Т.к. Ф=const, станина
- из цельнометаллической трубы.
Сердечники полюсов - из пластин электротехнической стали, изолированных между
собой. Полюсы - главные и дополнительные.
Главные —для создания основного Ф. Для
этого на полюс устанавливается катушка из
обмоточного провода (обмотка возбуждения).
Дополнительные полюсы - для улучшения
коммутации.
Ротор является якорем и состоит из вала,
сердечника с обмоткой 9, коллектора 1 и
вентилятора 8.
4.
Сердечник якоря - из пластин электротехнической стали – напрессовывают на вал. В сердечнике якоря выштампованы пазы, в которыхукладывается обмотка якоря (из обмоточного провода). Концы секции
обмоток электрически соединены с коллекторными пластинами.
Коллектор выполняют в виде цилиндра, собранного из клинообразных
пластин твердотянутой меди, изолированных между собой и валом.
Крепление пластин осуществляется корпусными шайбами с
изоляционными миканитовыми прокладками или с помощью пластмассы.
•Вал машины устанавливается в подшипниках.
•Для охлаждения используется система вентиляции. В машинах малой и
средней мощности обычно используют вентилятор, который крепится на
валу машины и закрывается кожухом из металла.
•Выводы обмоток идут в клеммную коробку, которая закреплена на
станине.
5.
Принцип действия : возьмем два магнитных полюса.Рис. 1.2 Рамка в
магнитном поле
- создаст
вращающий момент.
Направление
вращения - по правилу
левой руки.
Направление тока в
рамке меняется с
помощью полуколец, а
в реальной машине —
с помощью коллектора.
f
Между ними равномерное магнитное поле с индукцией В.
Между полюсами - рамка из проводникового материала
шириной D, м, длиной l , м, концы которой припаяны к
полукольцам. Электрический контакт внешней сети с
полукольцами осуществляется щетками. Это – простейшая
машина постоянного тока - может работать как генератором,
так и двигателем.
Генератором - необходимо вращать рамку. По закону элмагнитной индукции в ней будет наводиться ЭДС
,B
dФ
где Ф — магнитный поток, проходящий
e ,
через рамку, Вб; t — время, с.
dt
Эта ЭДС может сниматься с полуколец щетками. Ее направление - по правилу правой руки. За один оборот в
рамке будет создаваться переменная ЭДС, и если бы
вместо полуколец концы рамки были бы припаяны к
кольцам, получился бы генератор переменного напряжения.
Для выпрямления ЭДС в простейшем случае служат
полукольца, а в реальной машине — коллектор.
Двигателем - необходимо к рамке подвести напряжение вызывает ток I, A. Он будет взаимодействовать с магнитным потоком, т.е. на него будет действовать сила f BlI ., Н
e
6.
•Электродвигатели постоянного тока имеют:1. хорошие регулировочные свойства,
2. значительную перегрузочную способность;
3. позволяют получать как жесткие, так и мягкие механические
характеристики.
Предназначены для регулируемых электроприводов и рассчитаны
на питание от полупроводниковых преобразователей.
Их применяют для :
1. привода различных механизмов в черной металлургии,
2. на транспорте (электровозы, тепловозы, электропоезда,
электромобили),
3. в грузоподъемных и землеройных устройствах
4. на морских и речных судах и в других приводах мощностью до
нескольких тысяч киловатт.
Двигатели небольшой мощности применяют в системах автоматики.
•Генераторы постоянного тока в последнее время в стационарных
установках вытесняются полупроводниковыми преобразователями, а на
транспорте — синхронными генераторами, работающими совместно с
полупроводниковыми выпрямителями.
7. 2. Способы возбуждения машин постоянного тока
Возбудить машину —означает навести в ней
основной Ф. Системы
возбуждения определяются схемой включения
обмотки возбуждения
относительно якоря, зависят от конструкции и
назначения машины
постоянного тока.
Обозначения:
Я1-Я2 – обмотка якоря
Ш1-Ш2 – независимая и
параллельная обмотка
возбуждения
(шунтовая);
С1-С2 – последовательная обмотка возбуждения (сериесная);
Д1-Д2 – обмотка дополнительных полюсов
8. При независимом возбуждении основной магнитный поток создается постоянными магнитами или обмоткой возбуждения, питаемой от
независимого источника.Для промышленных целей, в основном, применяют машины постоянного
тока с самовозбуждением – не требуется дополнительного источника
питания.
В машинах постоянного тока со смешанным возбуждением (компаундные)
параллельная и последовательная обмотки могут быть включены согласно
(их МДС совпадают) и встречно (направлены противоположно друг другу).
Обмотки параллельного возбуждения имеют большое количество витков,
намотанных проводом малого сечения – их омическое сопротивление
большое и по ним протекает небольшой ток.
По обмоткам последовательного возбуждения проходит ток якоря.
Поэтому они имеют относительно малое количество витков, выполненных
проводом большого сечения.
9. 3. Электродвижущая сила обмотки якоря машины постоянного тока
При вращении якоря в магнитном поле полюсов, в каждом из проводников обмоткиякоря будет наводиться ЭДС
где Bi — индукция в точке, где лежит данный проводник;
l - активная длина проводника;
eпр Bi lv,
v
- линейная скорость его вращения
.
ЭДС обмотки якоря будет = сумме ЭДС проводников одной параллельной ветви:
N
2a
N
2a
i 1
i 1
Е eпр lv Bi
где
(1)
N
— количество всех проводников в обмотке.
2а – количество параллельных ветвей
.
При большом количестве коллекторных пластин можно
пренебречь пульсацией ЭДС. Тогда для
расчета можно взять среднее значение
магнитной индукции Вср в пределах
полюсного деления τ. В этом случае
N
2a
Bi
i 1
Распределение магнитной
индукции под полюсом машины
постоянного тока
N
Bср
2a
10.
Полюсное деление - это часть окружности якоря приходящаяся на одинполюс:
D / 2 p,
где D — внешний диаметр якоря:
Dn (3)
Линейная скорость проводника:
v
,
D
2 p
.
(2)
60
где
n
— частота вращения якоря, мин-1.
Подставив выражения (2) и (3) в (1), получим среднее значение ЭДС:
E
N
n 2 p
Bср l
.
2a
60
т.к.
Np / 60a Ce
Bcp l Ф,
-- постоянная машины
- основной магнитный поток
Тогда среднее значение ЭДС машины постоянного тока:
E CeФn.
Мгновенное значение ЭДС пульсирует между значениями
Еmin и Еmax. Максим-ое знач-е пульсаций ΔЕ=0,5(Еmax - Еmin)
зависит от числа коллекторных пластин.
Уравнения равновесия ЭДС генератора можно вывести
исходя из схемы замещения цепи якоря: U Е I r .
г
Для двигателя постоянного тока:
б — схема замещения
цепи якоря
г
я я
U д Ед I я rя .
11.
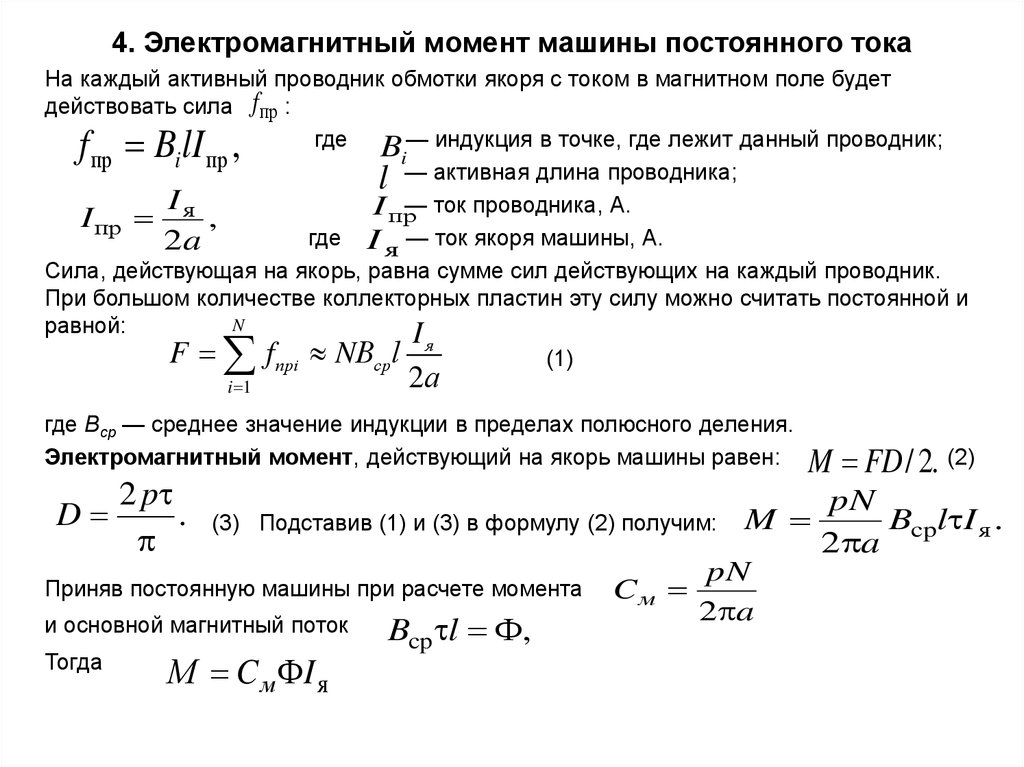
4. Электромагнитный момент машины постоянного токаНа каждый активный проводник обмотки якоря с током в магнитном поле будет
действовать сила f пр :
где B — индукция в точке, где лежит данный проводник;
i
пр
i пр
l — активная длина проводника;
Iя
I пр— ток проводника, А.
I пр
,
где I я — ток якоря машины, А.
2a
Сила, действующая на якорь, равна сумме сил действующих на каждый проводник.
При большом количестве коллекторных пластин эту силу можно считать постоянной и
N
равной:
I
F
f прi NВср l я
(1)
f B lI ,
i 1
2а
где Вср — среднее значение индукции в пределах полюсного деления.
Электромагнитный момент, действующий на якорь машины равен:
2 p
D
.
(3) Подставив (1) и (3) в формулу (2) получим:
Приняв постоянную машины при расчете момента
и основной магнитный поток
Тогда
М C м ФI я
Bcp l Ф,
Cм
M FD / 2. (2)
M
pN
2 a
pN
Bcpl I я .
2 a
12.
5. Магнитная цепь машины постоянного токаМагнитный поток при холостом ходе создается
только обмоткой возбуждения Фf . Он всегда замкнут
и проходит через
полюсы 1, воздушный зазор 2, зубцовую
зону якоря 3, ярмо ротора 4 и станину 5.
При симметричном воздушном зазоре между якорем
и сердечником полюса поток распределяется
симметрично относительно продольной оси машины.
Зависимость магнитного потока от МДС Фf = f (Ff ) или от тока возбуждения
Фf = f( If ) называется магнитной характеристикой машины.
На первом участке зависимость прямолинейна. Вся МДС машины тратится на преодоление воздушного зазора с постоянным магнитным сопротивлением. Участки, выполненные из
ферромагнитного материала, сопротивление магнитному
потоку практически не оказывают. С ростом Iв и Ф сталь
насыщается и начинает оказывать сопротивление магнитному потоку. Поэтому характеристика теряет свою линейность.
Ток возбуждения принимают такой, чтобы рабочая точка "А" находилась в месте
перегиба характеристики. Магнитная система будет насыщена.
13.
Степень насыщения характеризуется коэффициентом насыщения —отношением МДС машины к МДС воздушного зазора:
Для машины постоянного тока K 1, 2 2, 0
K F/F .
Магнитную индукцию на каждом участке
Вi Фf / Пi ,
Вi
определяют по формуле:
где Пi— площадь сечения участков, м2.
Зная магнитную индукцию, определяют напряженность магнитного поля на
каждом из участков по кривым намагничивания стали Вi =f(Hi). Для
воздушного зазора H :
H B / o ,
B — индукция в воздушном зазоре, Тл;
o — магнитная постоянная, равна 4 10-7, Г/м.
Fi H i li ,
Магнитодвижущую силу участков Fi определим по формуле:
где l — длина каждого участка, по которому проходит магнитный поток.
i
МДС, необходимая для создания требуемого магнитного потока, будет равна сумме
МДС участков.
По закону полного тока найдем ток возбуждения и количество витков обмотки
возбуждения :
n
F Fi I f W f ,
i 1
где
n
— количество участков магнитной цепи машины.
14.
6. Реакция якоря машины постоянного токаРис.1.12. Магнитное поле машины и распределение индукции в воздушном зазоре
При работе машины под нагрузкой по обмотке якоря протекает ток, который создает
МДС якоря. Воздействие МДС якоря на магнитное поле машины называется реакцией
якоря.
Для упрощения анализа считаем, что МДС
обмотки возбуждения и МДС реакции якоря
расходуются на преодоления магнитными
потоками воздушного зазора. Тогда вместо
указанных МДС можно рассматривать соответствующие потоки обмотки возбуждения
Фf и реакции якоря Фа.
В режиме холостого хода поток возбуждения Фf направлен по продольной оси машины (рис.а). Т.к. обмотка возбуждения является сосредоточенной, то распределение
МДС в воздушном зазоре в пределах полюсного деления Ff =f(τ) имеет форму прямоугольника. При этом кривая Вf=f(τ) в воздушном зазоре имеет форму криволинейной
трапеции (рис.а).
15.
При работе под нагрузкой, если щетки установлены на геометрическую нейтраль,магнитный поток якоря направлен поперек основного магнитного потока (рис. в) –
имеет место поперечная реакция якоря. Если обмотка якоря равномерно
распределена по его окружности, то МДС якоря изменяется линейно вдоль этой
окружности. Под серединой полюса она равна нулю, а в месте установки щеток
имеет максимальное значение. Под полюсом при =const индукция Ва изменяется
линейно вдоль окружности якоря. В межполюсном пространстве резко
увеличивается воздушный зазор, а индукция уменьшается. Поэтому индукция
якоря в воздушном зазоре имеет седлообразную форму (рис. в).
Кривую распределения результирующей индукции можно получить
алгебраическим сложением ординат кривых Вf=f(τ) и Ва=f(τ) (рис. с).
Результирующая магнитная индукция под одним краем полюса значительно выше,
чем под другим. Магнитный поток по полюсу распределен неравномерно.
Максимальное значение магнитной индукции сдвинуто с середины полюса и
физическая нейтраль смещена относительно геометрической на угол .
•Геометрическая нейтраль - место на коллекторе, к которому присоединены
секции, стороны которых находятся под серединами полюсов ( в этих точках
индукция при холостом ходе равна нулю).
•Физическая нейтраль - место на коллекторе, к которому присоединены секции,
ЭДС которых максимальны с учетом реакции якоря при работе машины ( в этих
точках индукция при нагрузке равна нулю).
16.
Для устранения влияния реакции якоря:Рис. 2.14 Компенсационная обмотка:
1 — станина, 2 — обмотка
возбуждения, 3 — полюс, 4 — пазы
для компенсационной обмотки, 5 —
якорь
1) Используют компенсационную обмотку, которую укладывают продольно в пазы полюсных
наконечников (рис. 2.14) и включают последовательно и встречно с обмоткой якоря. Количество
витков такое, чтобы поток обмотки был равен
потоку реакции якоря и компенсировал его.
2) Увеличивают зазор под главными полюсами,
что ослабляет поток реакции якоря. Но это
ослабляет и основной магнитный поток. Поэтому
требуется большая МДС главных полюсов.
3) Используют добавочные полюса, обмотки
которых включаются последовательно и встречно
с обмоткой якоря.
Если щетки сдвинуты с геометрической нейтрали, якорь можно
разделить на четыре зоны: I и III зоны создадут поперечную
реакцию якоря, во II и IV зонах будет продольная реакция якоря.
Если щетки сдвинуты по направлению вращения генератора или
против направления вращения двигателя, то продольная
составляющая реакции якоря размагничивает машины. При
сдвиге щеток в обратном направлении – подмагничивает.
17. 7. Потери и КПД машины постоянного тока
Потери машины постоянного токарассмотрим на примере двигателя.
Р1=UI
Р2=М2ω
Pэм
Pэл
Pм
Pмех
Pдоп
Энергетическая диаграмма двигателя
I a — ток параллельной ветви, который идёт по
щётке; K — количество щёток.
Pэл зависят от нагрузки машины, поэтому они
называются переменными.
При подаче напряжения
на двигатель по обмотке
якоря и обмотке возбуждения начинает протекать ток. Из сети двигатель потребляет мощность Р1=UI. В обмотках и
щетках возникают электрические потери Pэл .
Pэл I f2 rш I я2rя I я2rc K U щ I a ,
где rш , rя , rc — сопротивления соответственно
обмоток параллельного
возбуждения, якорной и
последовательного возбуждения; Uщ — падение
напряжения на щётке;
18.
Электрический ток, протекая по обмоткам возбуждения, наводит магнитныйпоток, который проходит по магнитным цепям машины и создает в них магнитные потери Pм .
Они состоят из потерь на вихревые токи и перемагничивание.
Перемагничиванию подвергается якорь и полюсные наконечники.
Магнитные потери зависят от :
1. магнитной индукции,
2. марки и толщины листов стали, из которой набран сердечник якоря,
3. частоты перемагничивания.
При взаимодействии магнитного поля с током якоря, якорь начинает вращаться. Возникают механические потери Pмех - обусловлены:
1. трением в подшипниках,
2. щёток о коллектор,
3. вентилятора о воздух.
Также в машине имеют место добавочные потери Pд - складываются из:
1. потерь в уравнительных соединениях,
2. в стали из-за неравномерной магнитной индукции под полюсом,
3. от пульсации магнитного потока в полюсных наконечниках и т.д.
Pмех и Pм не зависят от нагрузки. Их называют постоянными.
19.
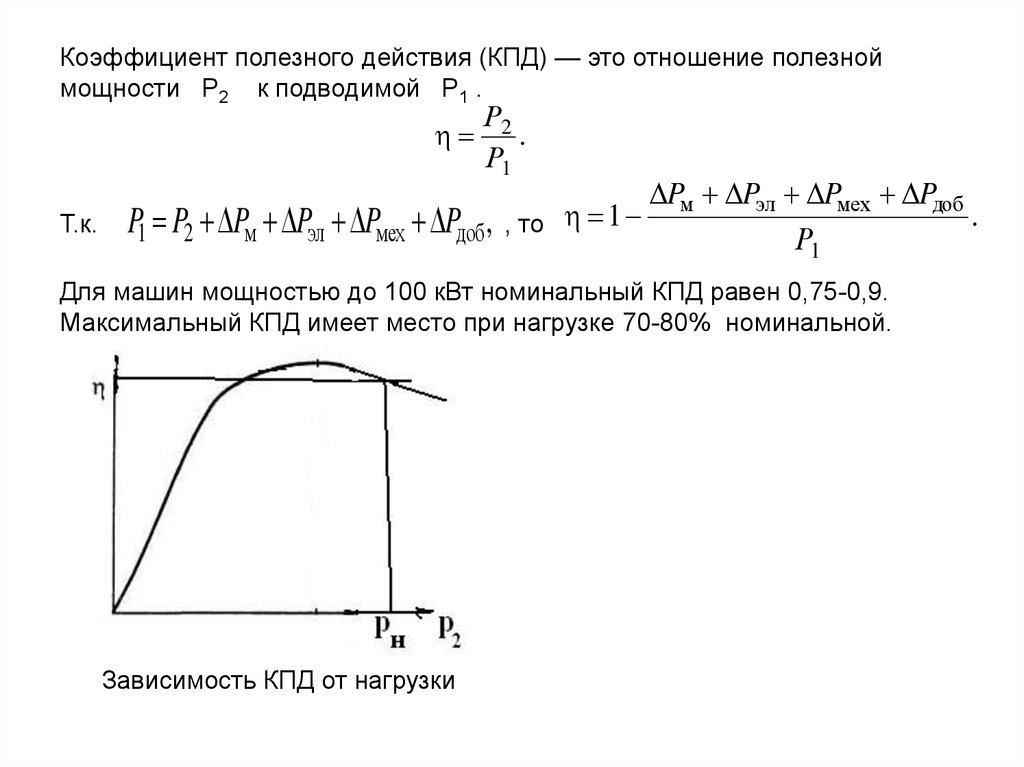
Коэффициент полезного действия (КПД) — это отношение полезноймощности Р2 к подводимой Р1 .
Р2
.
Р1
Pм Pэл Pмех Pдоб
.
Т.к. P1 P2 Pм Pэл Pмех Pдоб , , то 1
Р1
Для машин мощностью до 100 кВт номинальный КПД равен 0,75-0,9.
Максимальный КПД имеет место при нагрузке 70-80% номинальной.
Зависимость КПД от нагрузки
20. Двигатели постоянного тока
Уравнение равновесия ЭДС имеет вид:U = EД + Iяrя
где U – напряжение сети, EД – ЭДС якоря двигателя
Уравнение моментов двигателя: Мд – Мс = Мдин = J dω/dt
где Мд – момент двигателя, Мс – момент сопротивления рабочей
машины, J – момент инерции
E CeФn. - среднее значение ЭДС машины постоянного тока
Ce - постоянная машины
Ф - основной магнитный поток
n - частота вращения якоря, мин-1
М = СМ Ф Iя - электромагнитный момент машины постоянного
тока
СМ - постоянная машины
Iя – ток якоря
21. 8. Характеристики двигателей параллельного возбуждения
Характеристики, полученные без дополнительных сопротивлений в цепяхдвигателя, называются естественными, а остальные — искусственными.
1. Моментная характеристика – зависимость момента на валу
двигателя от тока якоря M f ( I я ) , при U=const.
М Cм ФI я
При U=const ток возбуждения постоянен. Если
пренебречь реакцией якоря, постоянным будет и
магнитный поток. Тогда зависимость момента от тока
якоря линейна.
2.Скоростная
(электромеханическая)
характеристика – зависимость частоты вращения
якоря двигателя от тока якоря n f ( I я ) , при U=const.
n = nx – Iяrя / CeФ (1) , где nх - частота вращения в
U
режиме холостого хода.
n
.
х
Cе
Скоростная характеристика жёсткая. При обрыве
цепи
возбуждения
ток
возбуждения
равен
нулю, магнитный поток равен остаточному, частота
вращения резко увеличивается. Это может привести
к аварии.
22.
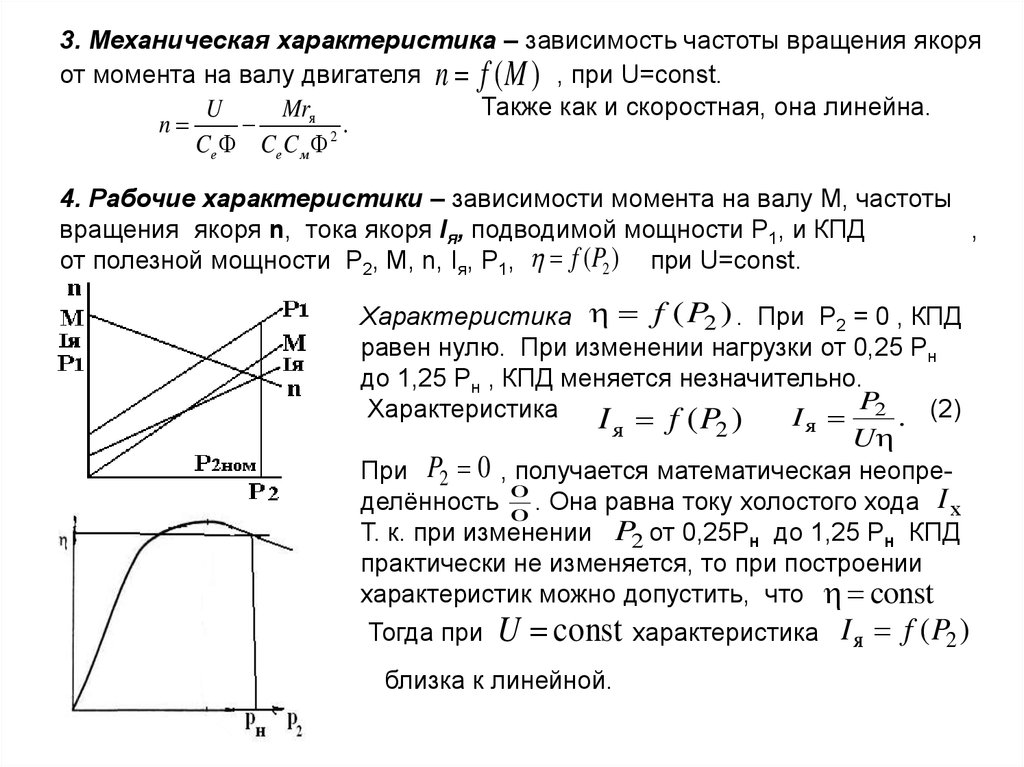
3. Механическая характеристика – зависимость частоты вращения якоряот момента на валу двигателя n f (M ) , при U=const.
Также как и скоростная, она линейна.
Mrя
U
n
.
Cе Cе C м 2
4. Рабочие характеристики – зависимости момента на валу М, частоты
вращения якоря n, тока якоря Iя, подводимой мощности P1, и КПД
,
от полезной мощности P2, М, n, Iя, Р1, f ( P2 ) при U=const.
Характеристика f ( P2 ) . При Р2 = 0 , КПД
равен нулю. При изменении нагрузки от 0,25 Рн
до 1,25 Рн , КПД меняется незначительно.
P2
Характеристика
I
. (2)
I я f ( P2 )
я
U
При P2 0 , получается математическая неопределённость 0
. Она равна току холостого хода I х
0
Т. к. при изменении P2 от 0,25Pн до 1,25 Pн КПД
практически не изменяется, то при построении
характеристик можно допустить, что const
Тогда при U const характеристика I я f ( P2 )
близка к линейной.
23.
Характеристикаполучим
n f ( P2 ) . Если выражение (2) подставим в формулу (1),
U
P2 rя
n
.
Cе UCе
Из уравнения видно, что рабочая характеристика аналогична скоростной
и механическим характеристикам.
Характеристика
M f ( P2 )
объясняется следующей формулой:
M 9550 ( P2 / n).
Так как с ростом P2 частота вращения n уменьшается, а P2 прямо
пропорционально I я, характеристика M f ( P2 ) , будет иметь больший
наклон, чем зависимость I я f ( P2 ) , и начинается с нуля.
Характеристика P1 f ( P2 )
P1 P2 P
Электрические потери зависят от квадрата нагрузки, поэтому
характеристика P1 f ( P2 ) теряет свою линейность, но незначительно.
24. 9. Характеристики двигателей последовательного возбуждения
Особенность указанного двигателя в том, что ток возбуждения являетсятоком нагрузки, и магнитный поток пропорционален току
Ф kI я ,
(2.67)
k
— коэффициент пропорциональности.
Моментная характеристика M f ( I я ), при U=const
Подставим (2.67) в формулу момента двигателя:
М С м kI я2 . (2.68)
Рис. 2.41 Схема двигателя
последовательного
возбуждения
Рис.
2.42
Моментная
характеристика
двигателя
последовательного возбуждения
Из выражения видно, что
моментная характеристика является параболой.
Скоростная (электромеханическая) характеристика n f ( I я ) , при
U=const. Подставим выражение (2.67) в формулу скоростной характеристики:
U
r
(2.69)
n
я .
Cе kI я
Cе k
Скоростная характеристика является гиперболой. Если ток якоря равен нулю I я 0
частота вращения равна бесконечности. Это означает, что двигатель последовательного
возбуждения нельзя запускать в режиме холостого хода.
25.
Механическая характеристикаn f (M ) , при U=const.
Выразим ток из формулы
(2.68).
I я M / Cмk .
(2.70)
Подставим (2.70) в уравнение (2.69):
n
Рис. 2.43 Скоростная
характеристика
двигателя
последовательного
возбуждения
Рис. 2.44 Механическая
характеристика
двигателя
последовательного
возбуждения
U
Cе
Cм
r
я . (2.71)
Mk Cе k
Механическая характеристика двигателя с последовательным возбуждением —
гипербола (рис. 2.44).
Скоростная и механическая характеристики двигателя с последовательным возбуждением мягкие - при изменении нагрузки в значительной
мере меняется частота вращения.
26.
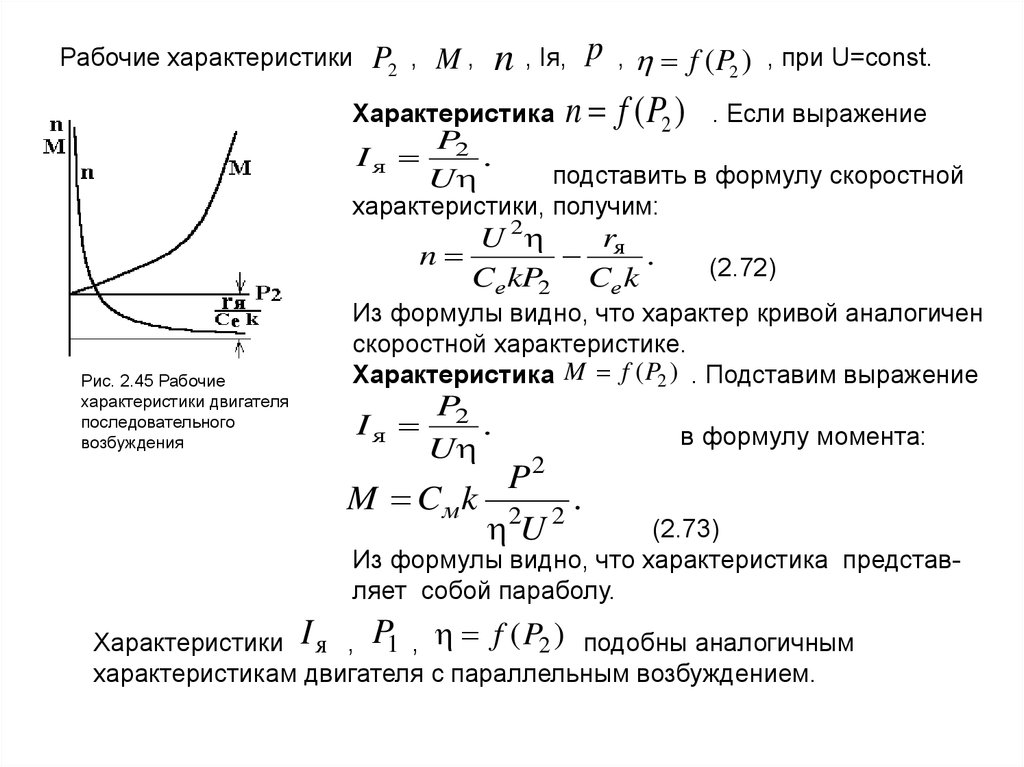
n , Iя, p , f ( P2 ) , при U=const.Характеристика n f ( P2 ) . Если выражение
Рабочие характеристики
P2
,
M,
Iя
P2
.
U
подставить в формулу скоростной
характеристики, получим:
U 2
r
n
я .
Cе kP2 Cе k
Рис. 2.45 Рабочие
характеристики двигателя
последовательного
возбуждения
(2.72)
Из формулы видно, что характер кривой аналогичен
скоростной характеристике.
Характеристика M f ( P2 ) . Подставим выражение
Iя
P2
.
U
в формулу момента:
P2
M Cмk 2 2 .
U
(2.73)
Из формулы видно, что характеристика представляет собой параболу.
Характеристики I я , P1 , f ( P2 ) подобны аналогичным
характеристикам двигателя с параллельным возбуждением.
27.
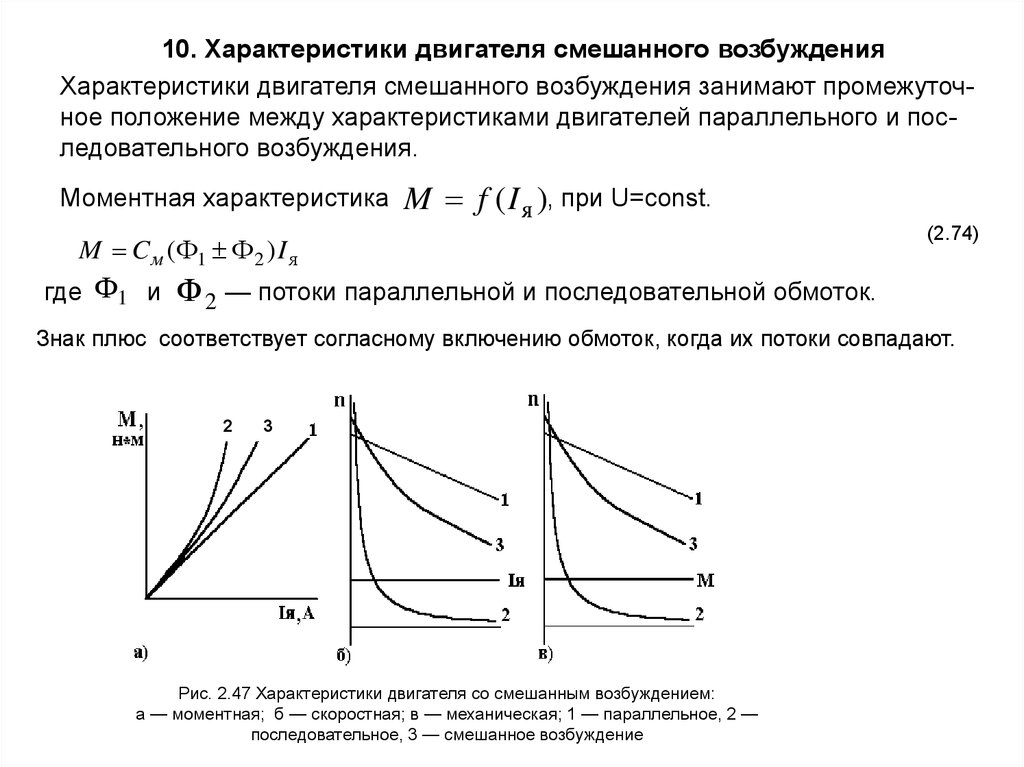
10. Характеристики двигателя смешанного возбужденияХарактеристики двигателя смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
Моментная характеристика
M f ( I я ), при U=const.
M C м (Ф1 Ф 2 ) I я
где Ф1 и
(2.74)
Ф 2 — потоки параллельной и последовательной обмоток.
Знак плюс соответствует согласному включению обмоток, когда их потоки совпадают.
2
3
Рис. 2.47 Характеристики двигателя со смешанным возбуждением:
а — моментная; б — скоростная; в — механическая; 1 — параллельное, 2 —
последовательное, 3 — смешанное возбуждение
28.
Скоростная (электромеханическая)nn
U I я rя
Се (Ф1 Ф 2 )
Механическая характеристика n
U Мrя
n
.
2
C мCe (Ф1 Ф 2 )
моментной, а
Iя
,
(2.75)
f (M )
n f ( P2 )
P1, f ( P2 )
Рабочие характеристики:
f ( I я )характеристика , при U=const:
, при U=const:
(2.76)
аналогична скоростной, M f ( P2 ) —
одинаковы для всех двигателей.
29.
11. Пуск двигателей постоянного токаИз уравнения равновесия ЭДС двигателя (2.52) ток якоря равен:
Iя
U Eд
.
rя
(2.81)
В момент пуска частота вращения и ЭДС двигателя Ед CеФп будут
равны нулю. Сопротивление якоря обычно мало, и при пуске ток якоря
мощных двигателей I я U / rя превышает номинальный ток в 10-20 раз.
Большой пусковой ток:
•вызывает значительные динамические усилия в двигателе, что может
привести к его разрушению;
•ухудшает условия коммутации, возможен круговой огонь по коллектору;
•вызывает значительное падение напряжения в линии, что отрицательно
влияет на работу других электропотребителей.
•Прямой пуск возможен только для двигателей малой мощности до 1 кВт. В
остальных случаях нужно применять специальные способы пуска
двигателей:
•реостатный пуск;
•пуск при пониженном напряжении.
30.
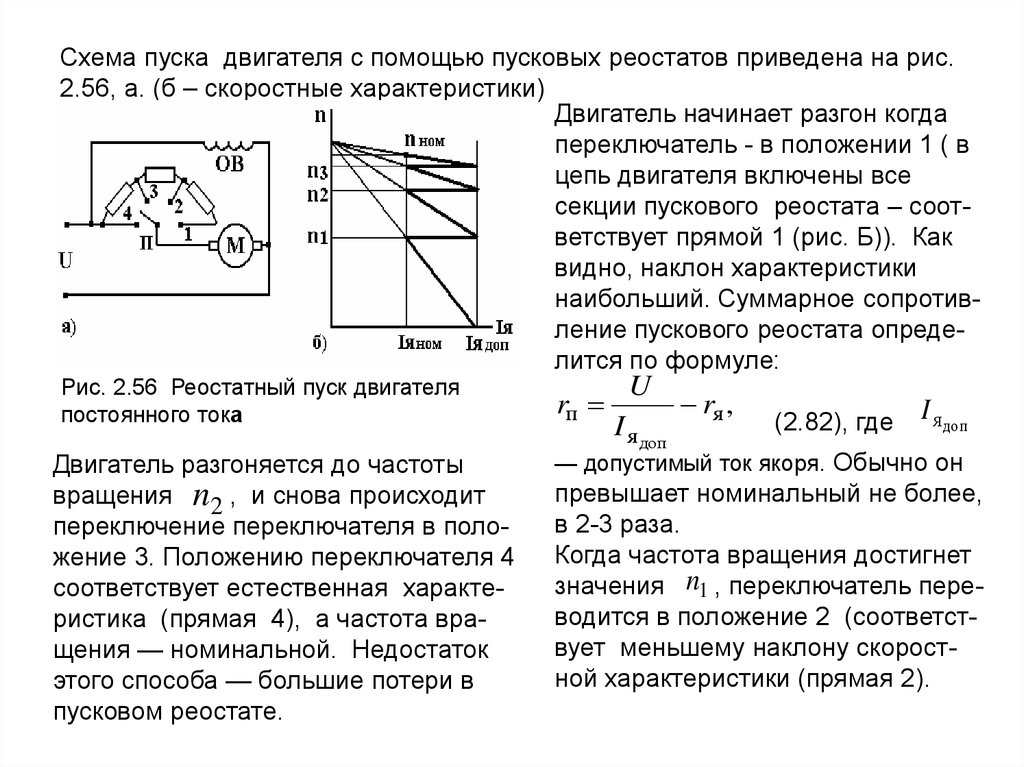
Схема пуска двигателя с помощью пусковых реостатов приведена на рис.2.56, а. (б – скоростные характеристики)
Двигатель начинает разгон когда
переключатель - в положении 1 ( в
цепь двигателя включены все
секции пускового реостата – соответствует прямой 1 (рис. Б)). Как
видно, наклон характеристики
наибольший. Суммарное сопротивление пускового реостата определится по формуле:
Рис. 2.56 Реостатный пуск двигателя
постоянного тока
Двигатель разгоняется до частоты
вращения n2 , и снова происходит
переключение переключателя в положение 3. Положению переключателя 4
соответствует естественная характеристика (прямая 4), а частота вращения — номинальной. Недостаток
этого способа — большие потери в
пусковом реостате.
rп
U
I я доп
rя ,
(2.82), где
I я доп
— допустимый ток якоря. Обычно он
превышает номинальный не более,
в 2-3 раза.
Когда частота вращения достигнет
значения n1 , переключатель переводится в положение 2 (соответствует меньшему наклону скоростной характеристики (прямая 2).
31.
Поэтому в двигателях большой мощности применяют пуск припониженном напряжении.
Для этого необходим регулятор напряжения:
регулируемые автотрансформаторы с выпрямительным блоком,
генераторы постоянного тока,
тиристорные регуляторы,
широтно-импульсные преобразователи,
переключение с последовательного соединения двигателей на
параллельное.
При снижении напряжения скоростные характеристики смещаются вниз
(рис. 2.48 – показано ниже), и пусковой ток уменьшается.
32. 12. Регулирование частоты вращения двигателей постоянного тока
Для двигателя параллельного возбуждения частота вращения:U I я rя
n
Се Ф
Частоту вращения можно регулировать изменением напряжения
сопротивления якоря rя или магнитного потока .
•Регулирование частоты изменением напряжения.
Рис. 2.48 Скоростные
характеристики при
изменении напряжения в
цепи якоря U1 > U2 > U3
U
,
Изменение напряжения необходимо осуществлять только в цепи якоря. Ток возбуждения и магнитный поток должен оставаться постоянным.
Скоростные характеристики при этом параллельны
и смещены относительно друг друга только по высоте. Диапазон регулирования ограничен «сверху»
условиями коммутации, «снизу» — нагревом двигателя (при снижении напряжения нужно увеличивать ток якоря. При этом nmax / nmin 20 . Для регулирования этим способом, необходим источник
регулируемого напряжения.
33.
Регулирование частоты вращения изменением сопротивления якорнойцепи:
I я (rя rд )
n nx
.
Сe Ф
Рис. 2.53 Регулирование частоты
вращения изменением сопротивления
якорной цепи:
а – схема; б – скоростные характеристики
Частота вращения холостого
хода не изменяется, а
изменяется только наклон
скоростной характеристики
(рис.2.53: 1— естественная,
2 — с дополнительным
сопротивлением в цепи якоря).
Регулирование возможно
только в сторону уменьшения
частоты вращения.
Диапазон nmax / nmin 4 . Он
ограничен сверху естественной
характеристикой, снизу —
устойчивостью работы.
34.
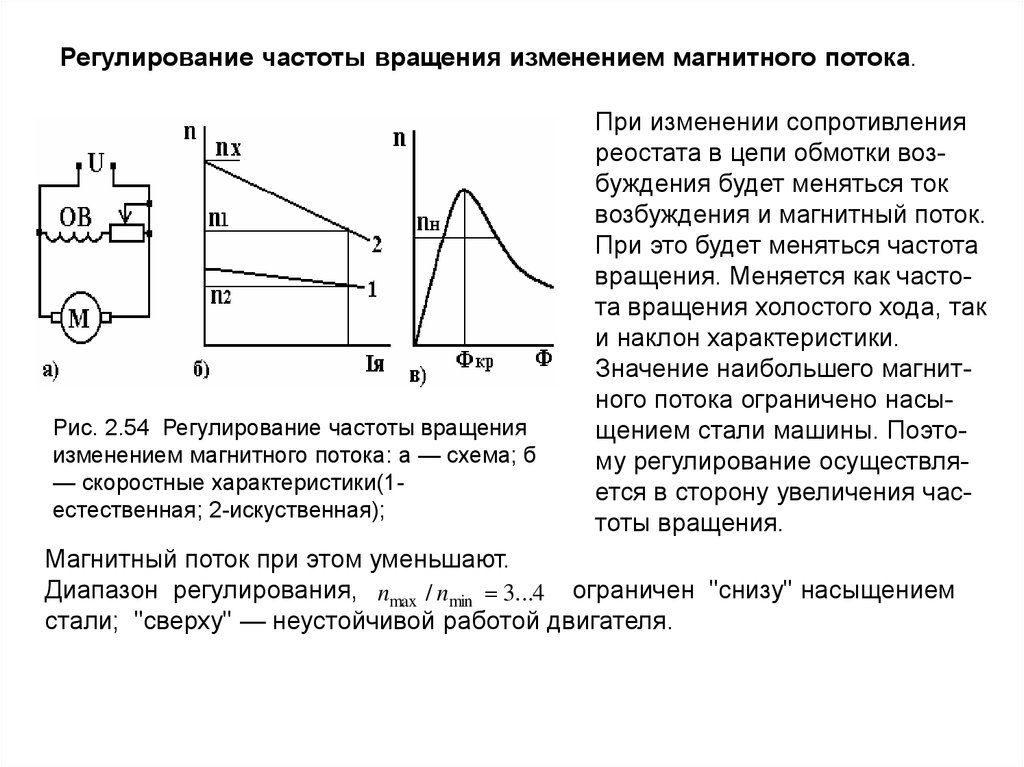
Регулирование частоты вращения изменением магнитного потока.Рис. 2.54 Регулирование частоты вращения
изменением магнитного потока: а — схема; б
— скоростные характеристики(1естественная; 2-искуственная);
При изменении сопротивления
реостата в цепи обмотки возбуждения будет меняться ток
возбуждения и магнитный поток.
При это будет меняться частота
вращения. Меняется как частота вращения холостого хода, так
и наклон характеристики.
Значение наибольшего магнитного потока ограничено насыщением стали машины. Поэтому регулирование осуществляется в сторону увеличения частоты вращения.
Магнитный поток при этом уменьшают.
Диапазон регулирования, nmax / nmin 3...4 ограничен "снизу" насыщением
стали; "сверху" — неустойчивой работой двигателя.
35. 25. Торможение двигателей постоянного тока
Для того остановить рабочую машину, наряду с механическими, применяютэлектрические способы торможения. В этом случае торможение осуществляется электромагнитным полем. Различают следующие виды электрического
торможения: рекуперативное, динамическое, противовключением.
•Рекуперативное — торможение, при котором машина работает
генератором с отдачей энергии в сеть. Оно наиболее экономично, но не
всегда осуществимо в реальных условиях, потому что частота вращения
должна быть выше, чем в режиме холостого хода
•Динамическое — это генераторное торможение, при котором кинетическая
энергия рабочей машины и самого двигателя гасятся на специальном
сопротивлении.
36.
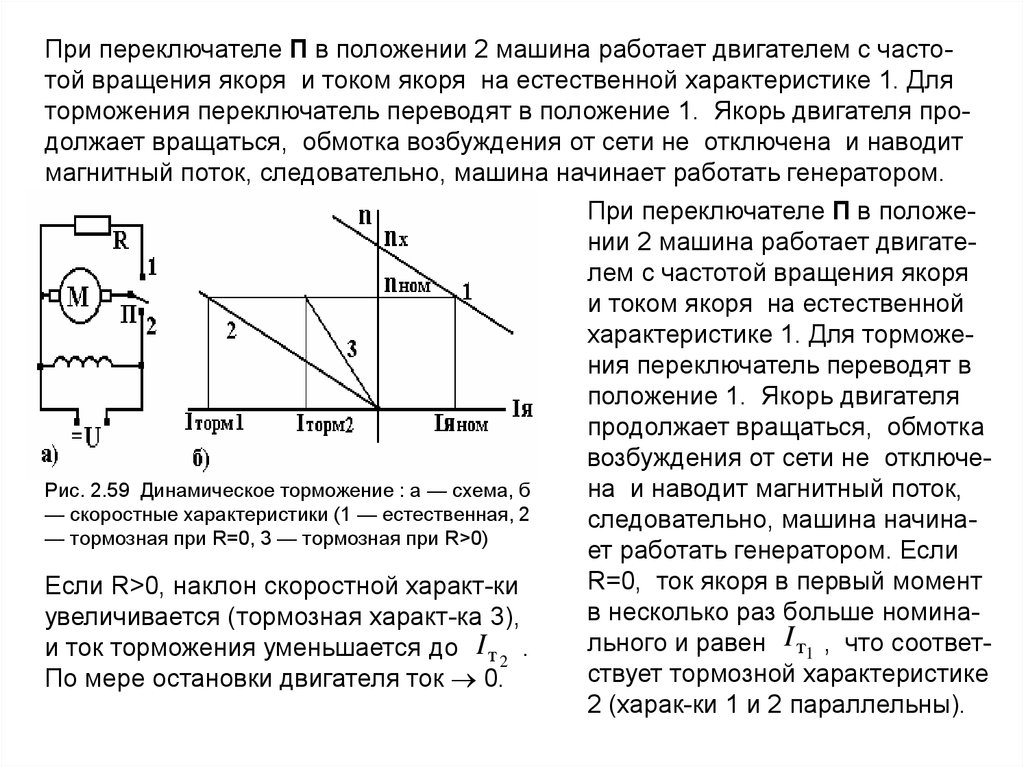
При переключателе П в положении 2 машина работает двигателем с частотой вращения якоря и током якоря на естественной характеристике 1. Дляторможения переключатель переводят в положение 1. Якорь двигателя продолжает вращаться, обмотка возбуждения от сети не отключена и наводит
магнитный поток, следовательно, машина начинает работать генератором.
При переключателе П в положении 2 машина работает двигателем с частотой вращения якоря
и током якоря на естественной
характеристике 1. Для торможения переключатель переводят в
положение 1. Якорь двигателя
продолжает вращаться, обмотка
возбуждения от сети не отключена и наводит магнитный поток,
Рис. 2.59 Динамическое торможение : а — схема, б
— скоростные характеристики (1 — естественная, 2
следовательно, машина начина— тормозная при R=0, 3 — тормозная при R>0)
ет работать генератором. Если
R=0, ток якоря в первый момент
Если R>0, наклон скоростной характ-ки
в несколько раз больше номинаувеличивается (тормозная характ-ка 3),
льного и равен I т1 , что соответи ток торможения уменьшается до I т 2 .
ствует тормозной характеристике
По мере остановки двигателя ток 0.
2 (харак-ки 1 и 2 параллельны).
37.
Торможение противовключением. Схема включения приведена на рис.2.60,а
При переводе переключателя П из положения 1 в 2, ток
якоря изменится на противоположный. Согласно правилу
левой руки, момент также
изменится на противоположный, т.е. будет тормозить
якорь. При R =0 ток якоря в
первый момент торможения I т1
будет приблизительно в 2 раза
больше, чем при динамическом торможении. При R 0
ток торможения будет I т 2 .
Тормозной момент по мере
торможения будет уменьшатьРис. 2.60 Торможение противовключением:
ся пропорционально току.
а — схема, б — скоростные характеристики
(1 — естественная, 2 — тормозная при R=0,
При n 0 момент не равен 0,
3 — тормозная при R>0)
и если двигатель не отключить,
он раскрутит якорь двигателя в
обратную сторону.