





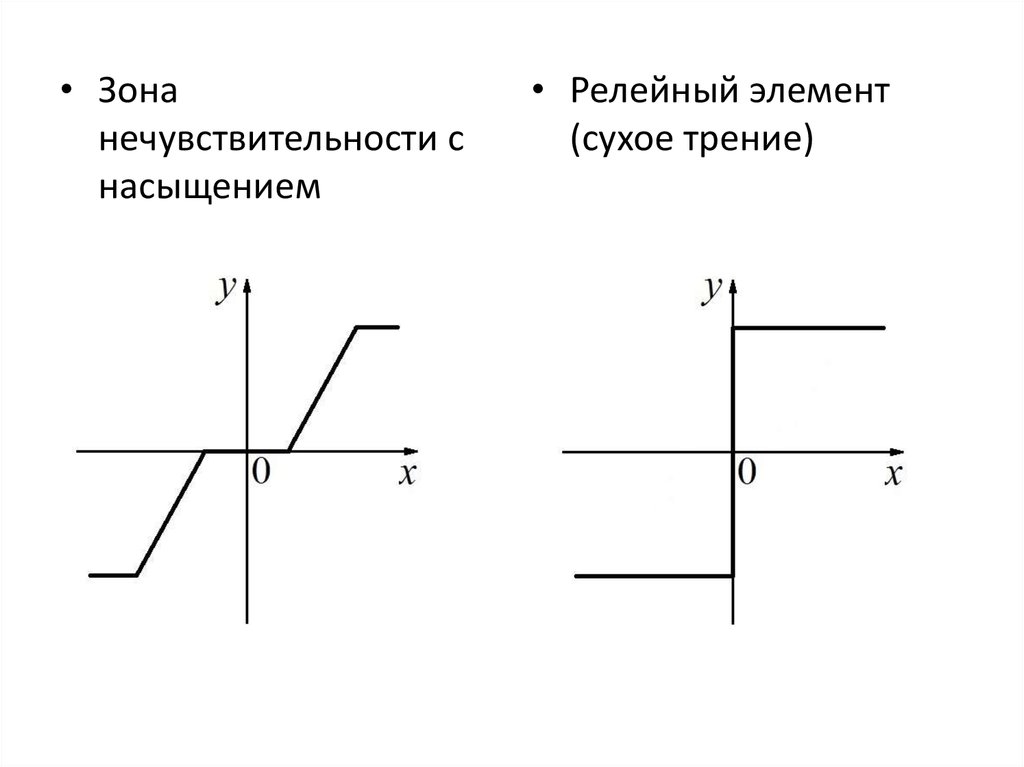
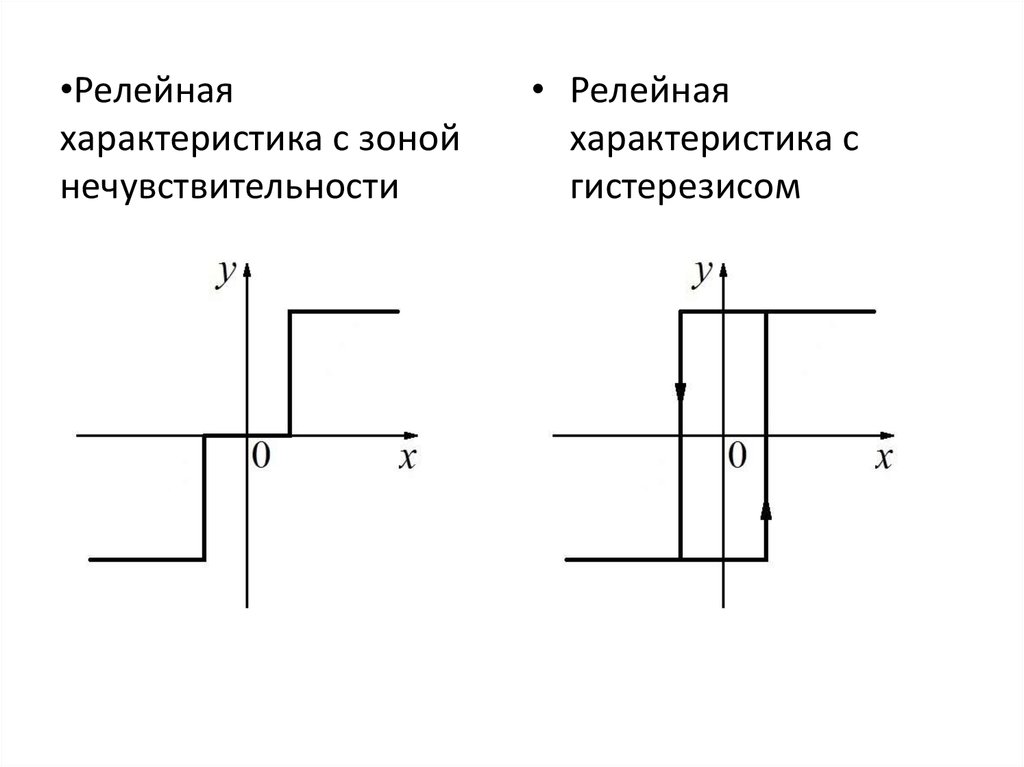
 и релейная (б) статические характеристики")










 Физика
ФизикаПохожие презентации:
. Лекция 5")








")
Элементы и функциональные устройства судовой автоматики
1. Элементы и функциональные устройства судовой автоматики
Литература:Элементы и функциональные устройства
судовой автоматики: Учебник. − 2-е изд. −
СПб.: Элмор, 1998
2. Часть 1
Введение.
Основные понятия.
Элементы, их классификация и описание
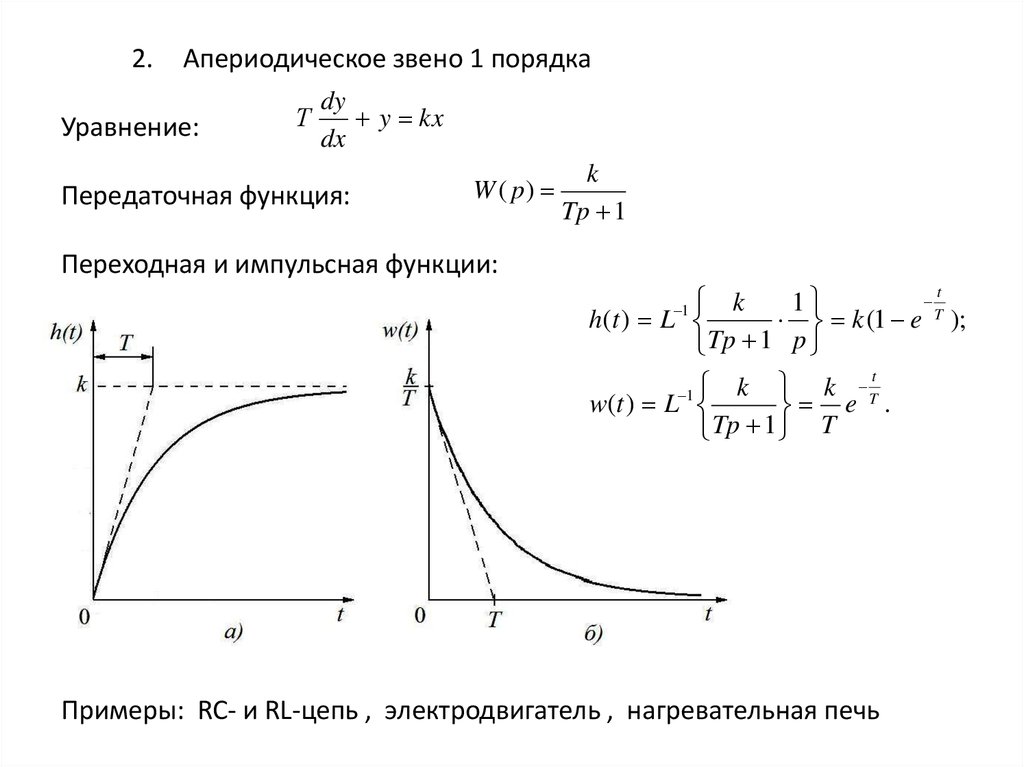
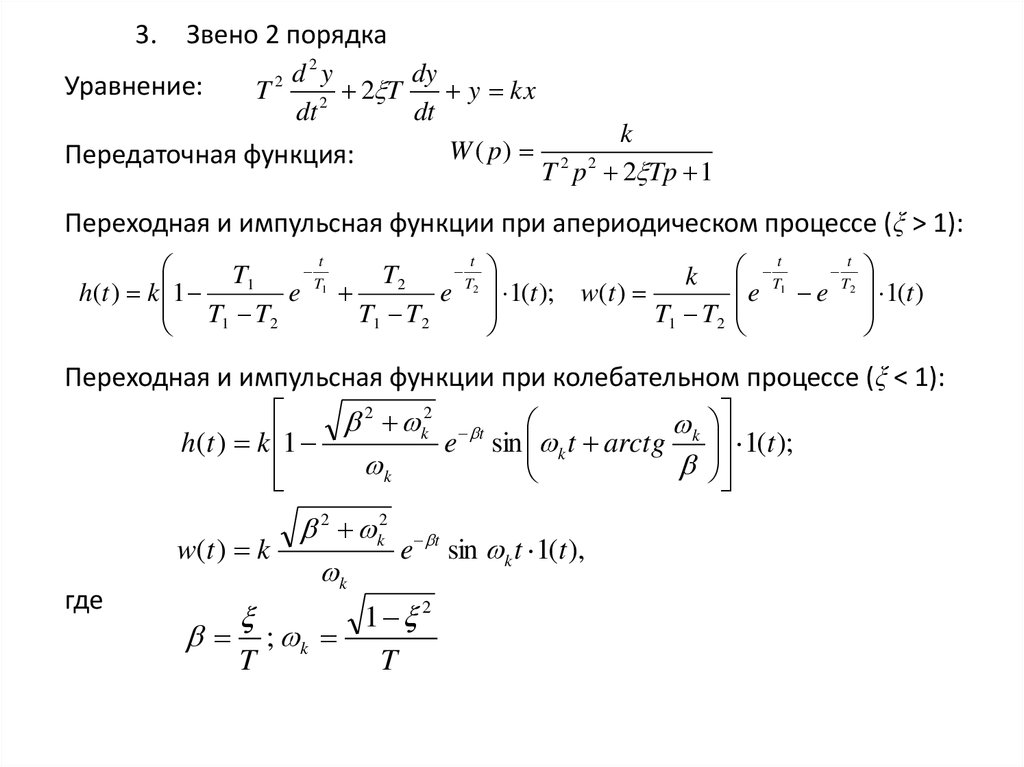
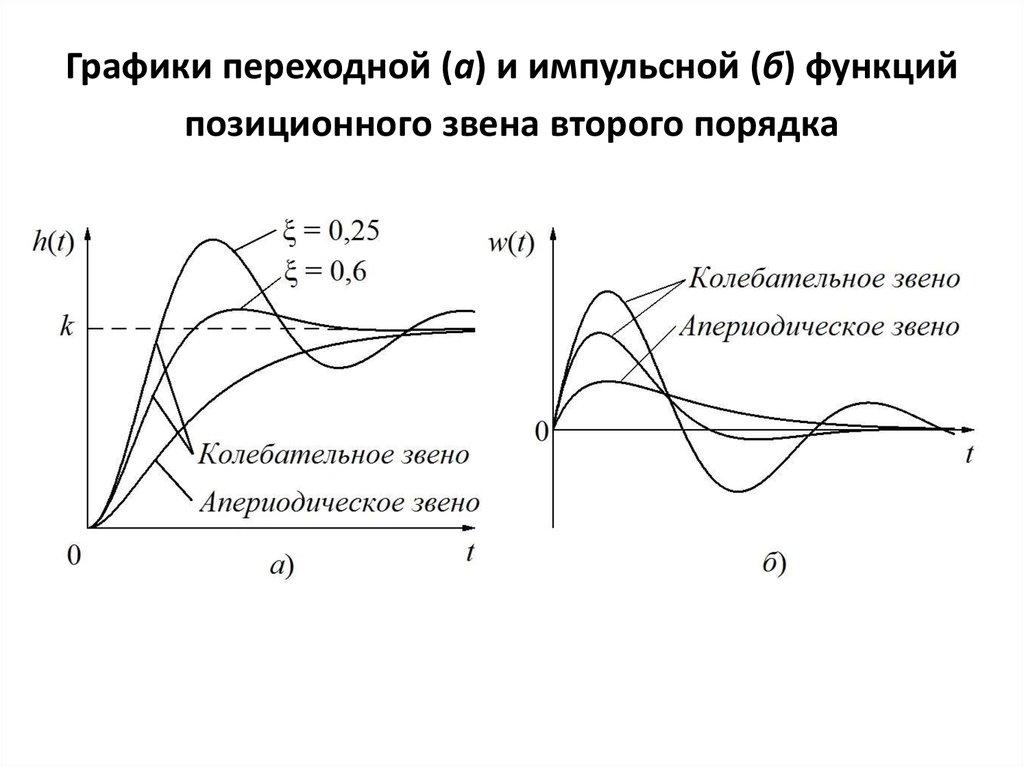
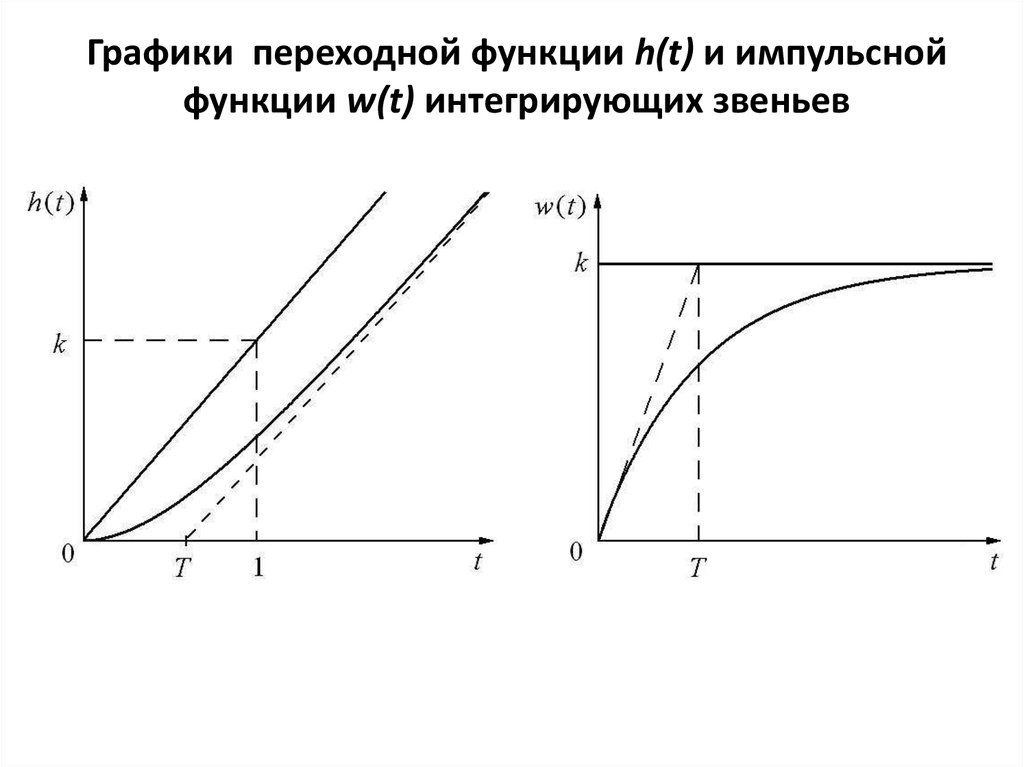
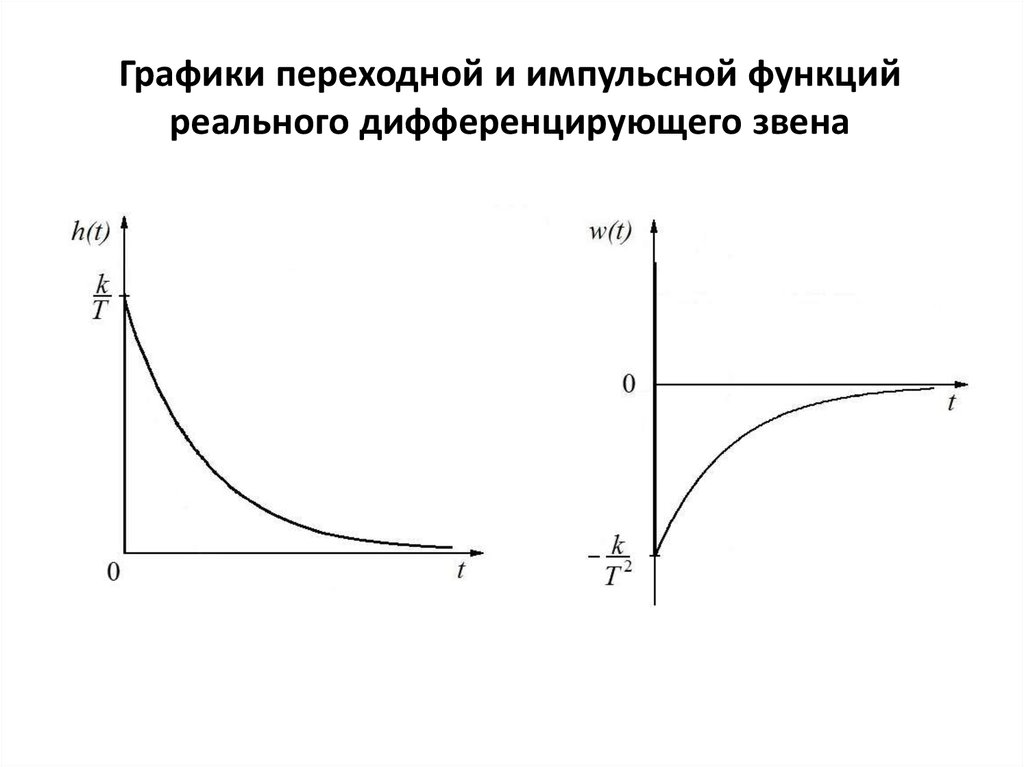
Типовые динамические звенья
3.
• Автоматическое управление ― автоматическое осуществлениесовокупности воздействий, выбранных из множества возможных на
основании определенной информации и направленных на
поддержание или улучшение функционирования управляемого
объекта в соответствии с целью управления.
• Автоматическое регулирование – поддержание постоянным или
изменение по заданному закону некоторой величины,
характеризующей процесс, осуществляемое путем определения
состояния объекта или действующих на него возмущений и
воздействия на регулирующий орган объекта.
• Система автоматического управления состоит из объекта управления
и автоматического управляющего устройства, взаимодействующих
между собой.
• Величины, характеризующие влияние, оказываемое на объект извне,
называются воздействиями.
• Воздействия, вырабатываемые управляющим устройством (или
задаваемые человеком), называются управляющими. Воздействия,
не зависящие от системы управления, называются возмущениями.
4. Величины, характеризующие воздействия на управляемый объект
5. Структурная схема автоматической системы с одной управляемой величиной
6. Типовая функциональная схема системы автоматического регулирования
7. Элементы автоматики
Элемент автоматики ― функционально и конструктивно законченноеустройство, предназначенное для выполнения некоторой элементарной
операции над сигналом (сигналами).
Типичные операции и выполняющие их элементы:
• преобразование контролируемой величины в сигнал, удобный для дальнейшей
обработки или передачи (измерительные преобразователи и датчики);
• преобразование сигнала одного рода энергии в сигнал другого рода энергии
(электропневматические, пневмоэлектрические и другие преобразователи);
• преобразование сигнала по величине энергии (усилители);
• преобразование непрерывного сигнала в дискретный и наоборот (АЦП и ЦАП);
• преобразование сигнала переменного тока в сигнал постоянного тока и
наоборот (демодуляторы и модуляторы, выпрямители и инверторы);
• функциональные преобразование сигналов (счетно-решающие устройства) ;
• выполнение логических операций (логические элементы);
• сравнение сигналов (компараторы);
• коммутация сигналов по различным направлениям (коммутаторы);
• хранение сигналов (элементы памяти);
• воздействие на управляемый объект (исполнительные элементы).
8.
Общее нелинейное уравнение системы:(1.1)
(обычно n > m)
Уравнение статики:
F(y, x) = 0.
(1.2)
Статическая характеристика элемента (зависимость между
выходной и входной величинами в установившемся режиме):
у = f (х) .
(1.3)