








 Программное обеспечение
Программное обеспечениеПохожие презентации:










Защита беспилотных летательных аппаратов от спуфинг атак
1. МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное бюджетное образовательное учреждение высшего
образования«Ульяновский государственный технический университет»
Защита беспилотных летательных аппаратов
от спуфинг атак
Cтудент бакалавриата, направления - «Инфокоммуникационные технологии и системы связи» Прокопьев Т.В.
Кафедра «Телекоммуникации»
Научный руководитель - профессор Гладких А.А.
Ульяновск – 2018
2. Сирия. Январь 2018.Атака БПЛА.
Рисунок 12
3.
Цель работы: Проведение анализа существующих методов захватабеспилотных летательных аппаратов с помощью спуфинг атак.
Задачи исследования:
1. Рассмотреть стратегии откровенного и скрытого спуфинга,
отличающиеся попытками спуфера, избежания обнаружения целевого
GPS-приемника и целевой навигационной системы оценщика.
2. Выявить необходимые условия для захвата БПЛА с помощью
спуфинга.
3. Проанализировать взаимосвязанную динамику БПЛА и спуфера, и
имитации для изучения практических сценариев контроля после захвата.
4. Внедрение метода перестановочного декодирования в систему
управления БПЛА.
3
4. Общее описание спуфинг атаки
Спуфинг (от англ. spoofing — подмена, мистификация) – это атака, которая пытается обмануть GPSприемник, широковещательно передавая немного более мощный сигнал, чем полученный от спутниковGPS, такой, чтобы быть похожим на ряд нормальных сигналов GPS.
Рисунок 2
Рисунок 2
4
5. Процесс захвата БПЛА
Красные точки – точкиотслеживания, которые пытаются
удерживать себя центрированными
на этом пике.
Рисунок 3
Рисунок 4
Рисунок 4
5
6. Классификация захватов
Захват навигационной системы
подразумевает, что spoofer получил
контроль над достаточным
количество целевых GPSприемников активных кодов и
отслеживает БПЛА.
• Основным «оружием» спуфера
стал имитатор GPS-сигналов и
усилители
η=
Пс Па -
Пс
Па
мощность спуфинг сигнала
мощность подлинного сигнала
6
7. Захват оценщика навигационного состояния
Результаты тестов спуфинг атакпротив различных коммерческих
GPS-приемников(скорость
смещения 10 м/с соответствует
смещению Доплера 53 Гц и
смещение 15 м/с соответствует
79 Гц)
7
8. Управление после захвата БПЛА
Цель управления спуфера - заставить БПЛА отслеживать некоторые исходные
положения, скорость и траекторию перемещения.
Рисунок 5
Оператор немедленно приказывает БПЛА ускориться на юг. Однако, он не имеет достаточного контроля, чтобы
остановить последствиями спуфинг атаки.
8
9. Проблемы возникающие при захвате
1. Тенезацияантенны
2. Расположение
антенны
Рисунок 6
9
10.
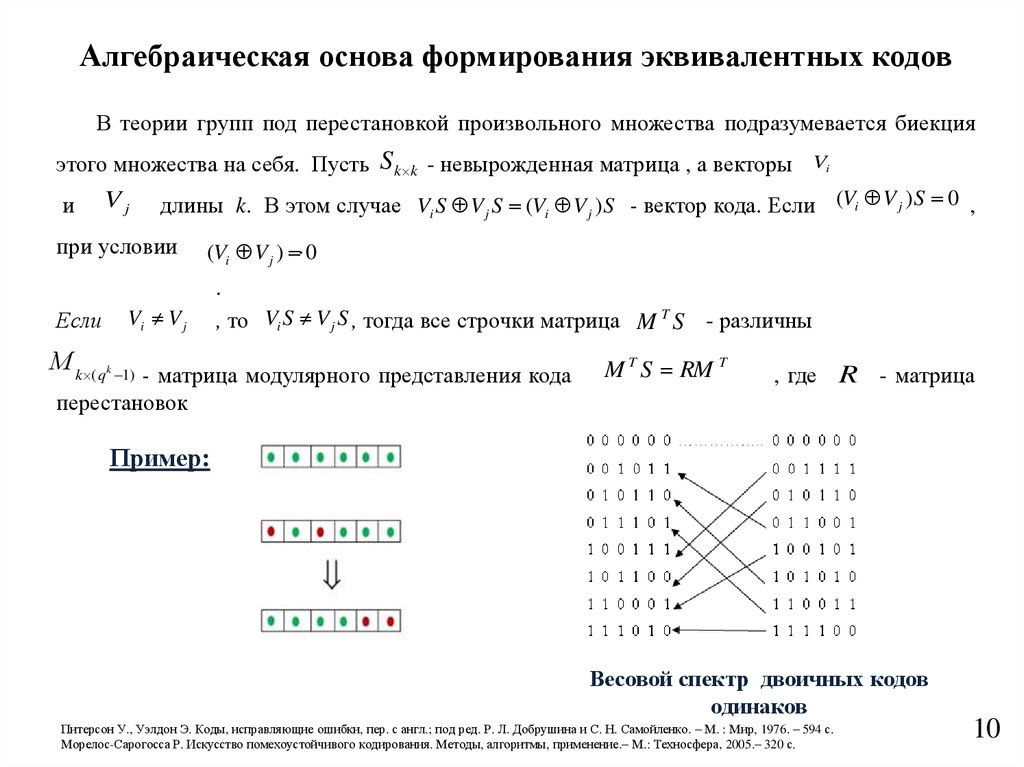
Алгебраическая основа формирования эквивалентных кодовВ теории групп под перестановкой произвольного множества подразумевается биекция
этого множества на себя. Пусть S k k - невырожденная матрица , а векторы Vi
и
Vj
длины k. В этом случае Vi S V j S (Vi V j ) S - вектор кода. Если (Vi V j ) S 0 ,
при условии
Если
(Vi V j ) . 0
Vi V j
.
, то Vi S V j S , тогда все строчки матрица M T S - различны
М k ( q k 1) - матрица модулярного представления кода
M T S RM T
, где R - матрица
перестановок
Пример:
Весовой спектр двоичных кодов
одинаков
Питерсон У., Уэлдон Э. Коды, исправляющие ошибки, пер. с англ.; под ред. Р. Л. Добрушина и С. Н. Самойленко. – М. : Мир, 1976. – 594 с.
Морелос-Сарогосса Р. Искусство помехоустойчивого кодирования. Методы, алгоритмы, применение.– М.: Техносфера, 2005.– 320 с.
10
11.
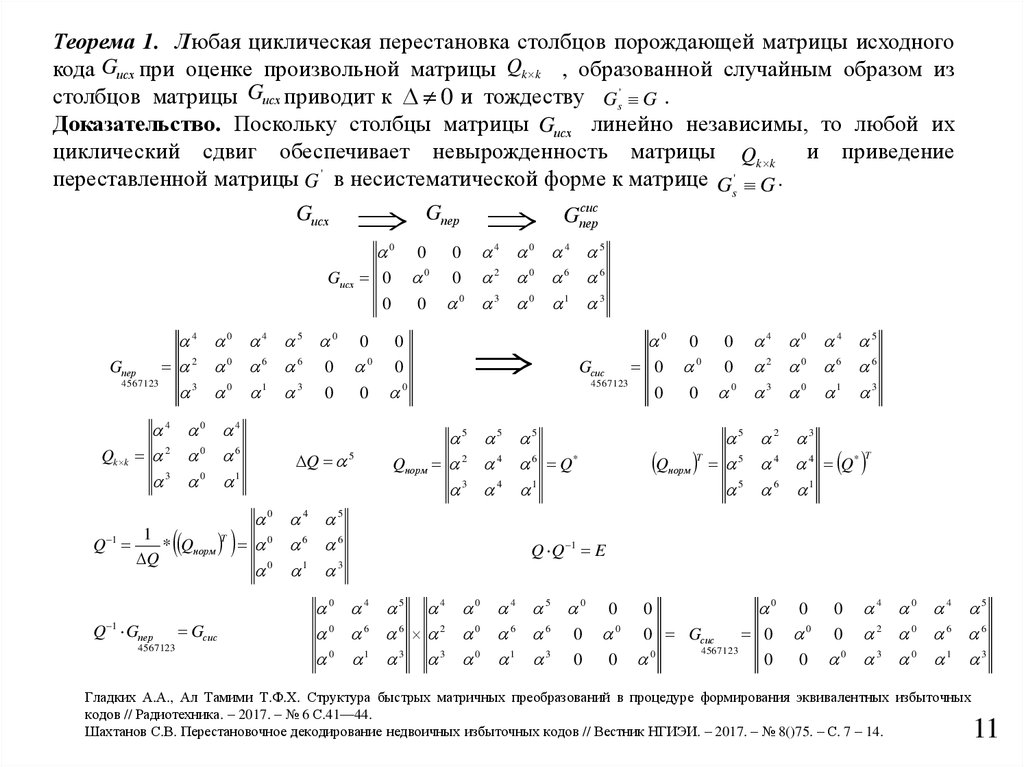
Теорема 1. Любая циклическая перестановка столбцов порождающей матрицы исходногокода Gисх при оценке произвольной матрицы Qk k , образованной случайным образом из
столбцов матрицы Gисх приводит к 0 и тождеству Gs' G .
Доказательство. Поскольку столбцы матрицы Gисх линейно независимы, то любой их
циклический сдвиг обеспечивает невырожденность матрицы Qk k и приведение
переставленной матрицы G ' в несистематической форме к матрице Gs' G .
сис
Gисх Gпер Gпер
0
0
0
Gисх 0
0
0
0
0
0
4 0 4 5 0 0 0
Gпер
2 0 6 6 0 0 0
4567123
3 0 1 3 0 0 0
Qk k
Q 1
4 0 4
2 0 6
3 0 1
1
T
* Qнорм
Q
Q 1 Gпер
4567123
Gсис
Q 5
0 4 5
0 6 6
0 1 3
4 0 4 5
2 0 6 6
3 0 1 3
Gсис
4567123
5 5 5
Qнорм 2 4 6 Q*
3 4 1
0
0
0
0
0
0
0
0
0
Q
T
норм
4 0 4 5
2 0 6 6
3 0 1 3
5 2 3
T
5 4 4 Q *
5 6 1
Q Q 1 E
0 4 5 4 0 4 5 0 0 0
0 0 0 4 0 4 5
0 6 6 2 0 6 6 0 0 0 Gсис 0 0 0 2 0 6 6
4567123
0 1 3 3 0 1 3 0 0 0
0
0 0 3 0 1 3
Гладких А.А., Ал Тамими Т.Ф.Х. Структура быстрых матричных преобразований в процедуре формирования эквивалентных избыточных
кодов // Радиотехника. – 2017. – № 6 С.41—44.
Шахтанов С.В. Перестановочное декодирование недвоичных избыточных кодов // Вестник НГИЭИ. – 2017. – № 8()75. – С. 7 – 14.
11
12. Выводы
1. Развитие беспроводных сенсорных сетей требует предвидения спуфинг атак иразработку методов противодействия таким акциям.
2. В качестве методов борьбы с акциями спуфинга следует рассматривать
системы криптографии, которые экономически невыгодны на таких
устройствах.
3. Применение средств помехоустойчивости кодирования с использованием
управляемых перестановок, позволяющих на коротком отрезке времени
осуществлять маскировку истинной структуры сигнала.
12