







 География
ГеографияПохожие презентации:










Методы GPS – измерений
1. Презентация на тему: Методы GPS – измерений.
2.
GPS (англ. Global Positioning System — система глобальногопозиционирования, читается Джи Пи Эс) — спутниковая система навигации,
обеспечивающая измерение расстояния, времени и определяющая
местоположение во всемирной системе координат WGS 84. Позволяет в
любом месте Земли (исключая приполярные области), почти при любой
погоде, а также в околоземном космическом пространстве определять
местоположение и скорость объектов. Система разработана, реализована и
эксплуатируется Министерством обороны США, при этом в настоящее
время доступна для использования для гражданских целей — нужен только
навигатор или другой аппарат (например, смартфон) с GPS-приёмником.
Основной принцип использования системы — определение
местоположения путём измерения моментов времени приёма
синхронизированного сигнала от навигационных спутников антенной
потребителя.
3. Где используется?
Съемка с помощью геодезических спутниковых приемников имеет рядпреимуществ, это: глобальность, оперативность, всепогодность,
оптимальная точность и эффективность.
Геодезические спутниковые приемники применяются во многих областях,
таких как:
• Развитие опорных геодезических сетей всех уровней: от глобальных до
съемочных.
• Проведение нивелирных работ.
• Распространение единой высокоточной шкалы времени.
• Исследования сейсмической активности и вулканизма, движений
полюсов, земной поверхности, горных пород и ледников и др.
• Обеспечение добычи полезных ископаемых.
• Геодезическое обеспечение строительства, прокладки кабелей,
путепроводов, ЛЭП, и других инженерно-прикладных работ.
• Кадастровые работы.
• Землеустроительные работы.
• Картография и геоинформатика.
4.
5. Как работает?
Основной механизм, применяемый во всех спутниковыхрадионавигационных системах как в GPS NAVSTAR, так и
в ГЛОНАСС, позволяющий найти положение точки в
трёхмерном пространстве, заключается в многократном
вычисление расстояний до множества пунктов с
известными координатами. В данном случае до
орбитальной группировки спутников. В результате
обработки значений способом линейной засечки, в
районе искомого объекта возникает облако точек с
приблизительными координатами, рассчитанными на
разный момент времени (часто через 5 секунд) за весь
период измерений. Дальше программным методом
вычисляется некоторое усредненное значение
координат. Точность определения координат зависит от
класса Спутникового приёмника и от режима измерений,
в определенных условиях и от продолжительности
измерений. Существует два основных режима
определения координат с использованием GPS
аппаратуры.
6.
Имеется несколько методов выполнения наблюдений. Выбор конкретногометода зависит от следующих факторов:
1.требуемый уровень точности;
2.технические возможности приемника и наличие соответствующего программного
обеспечения;
3.характер окружающей местности и метеоусловия (радиопомехи, рельеф, гроза);
4.наличие ограничений на переезд между наблюдаемыми пунктами и расстояние
между ними;
5.конфигурация спутниковой системы и количество наблюдаемых спутников,
наличие средств связи.
Для решения различных задач:
1. определения точных координат отдельных точек,
2. последовательных измерений местоположения множества точек,
3. непрерывных координатных определений в процессе движения автомобиля и др.
7.
Существует два основных режима определения координат с использованиемGPS аппаратуры.
1. Абсолютный – это когда координаты GPS приёмника вычисляются относительно
абсолютных координат спутников на любой момент измерений кодовым способом.
Механизм измерения таков: на спутнике и на приёмной GPS системе по заданному
алгоритму формируется псевдослучайный кодовый сигнал, в заданные промежутки
времени строго синхронно со спутников сигнал в форме электромагнитной волны
отправляется на землю, при поступлении на приёмную антенну программа фиксирует
время прихода и считывает время выхода, таким образом, по скорости прохождения пути
определяется расстояние. Ключевым условием при этом является точность
синхронизации атомных часов на спутнике, и наличие единовременного поступления на
антенну сигнала от четырёх спутников, для коррекции асинхронности часов на спутнике и
GPS приёмнике. Однако в результате неизбежного возникновения различных ошибок –
точности и синхронности часов, задержки в движении электромагнитной волны, т.е.
отклонение от скорости света, не точная информация о моментальных координатах
спутников, нестабильные условия приёма на антенне и др. не позволяют гарантировать
при кодовом способе точность получаемых координат лучше пяти – десяти метров. Этот
режим определения координат в основном применяется в навигации и для любительского
использования в бытовых GPS системах. Преимуществом является быстрота получаемых
данных.
8.
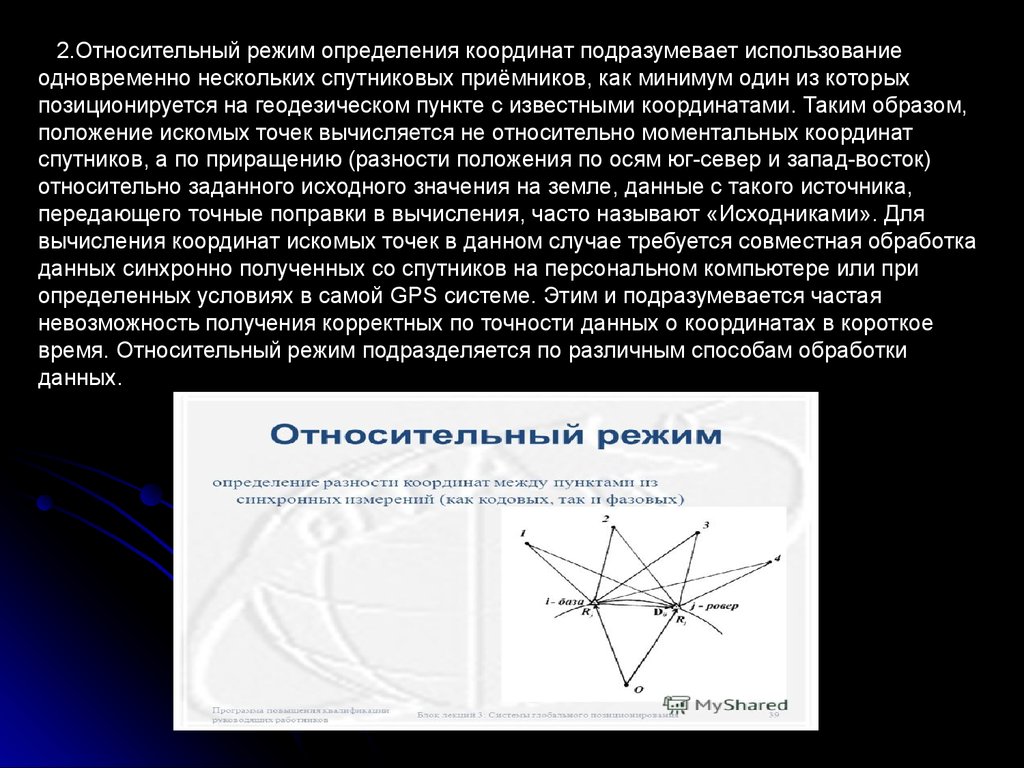
2.Относительный режим определения координат подразумевает использованиеодновременно нескольких спутниковых приёмников, как минимум один из которых
позиционируется на геодезическом пункте с известными координатами. Таким образом,
положение искомых точек вычисляется не относительно моментальных координат
спутников, а по приращению (разности положения по осям юг-север и запад-восток)
относительно заданного исходного значения на земле, данные с такого источника,
передающего точные поправки в вычисления, часто называют «Исходниками». Для
вычисления координат искомых точек в данном случае требуется совместная обработка
данных синхронно полученных со спутников на персональном компьютере или при
определенных условиях в самой GPS системе. Этим и подразумевается частая
невозможность получения корректных по точности данных о координатах в короткое
время. Относительный режим подразделяется по различным способам обработки
данных.
9.
В зависимости от поставленной задачи, требуемойточности, площади работ применяют следующие
виды съемки:
• Статика
• Быстрая статика
• Кинематика «Stop & go»
• Кинематика
• Кинематика в реальном времени (RTK)
10.
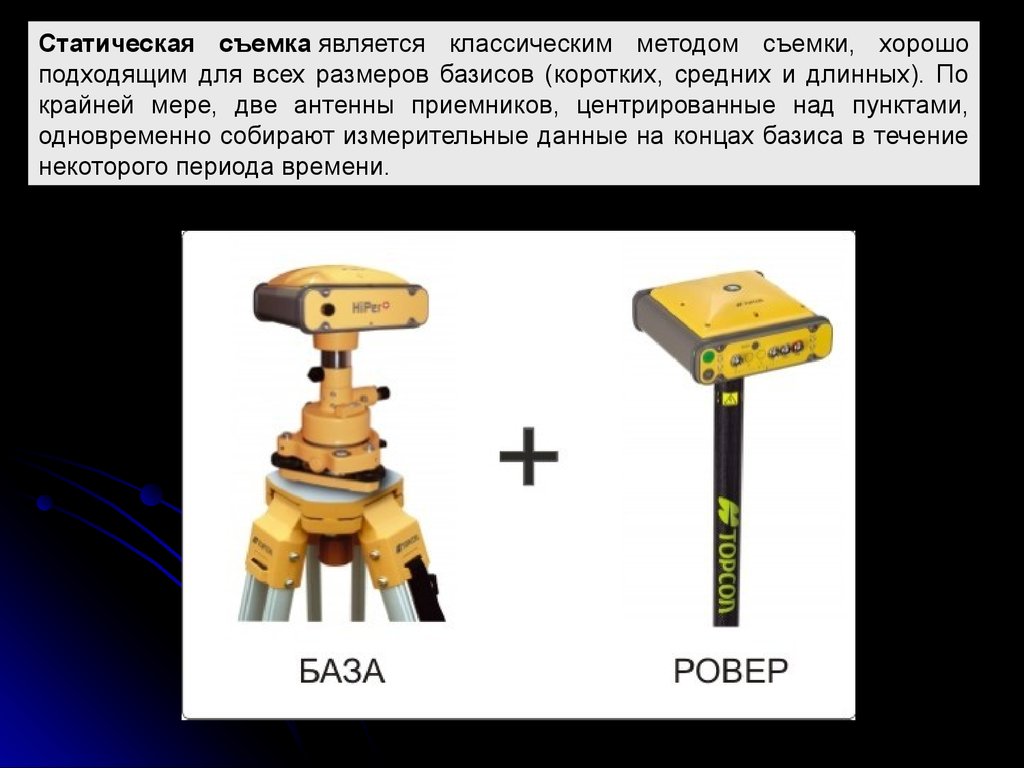
Статическая съемка является классическим методом съемки, хорошоподходящим для всех размеров базисов (коротких, средних и длинных). По
крайней мере, две антенны приемников, центрированные над пунктами,
одновременно собирают измерительные данные на концах базиса в течение
некоторого периода времени.
11.
Эти два приемника должны одновременно отслеживать четыре (или более)спутника, записывать данные с одинаковым периодом и иметь
одинаковые значения угла предельного возвышения.
Продолжительность сеанса измерений может варьироваться от
нескольких минут до нескольких часов. Оптимальная
продолжительность сессии обсервации определяется опытным путем
и зависит от следующих факторов:
• Длины измеряемой базовой линии.
• Количества спутников в поле зрения.
• Геометрического фактора (Dilution of Precision, DOP).
• Расположения антенны.
• Уровня активности ионосферы.
• Типа используемых приемников.
• Требований по точности.
• Необходимости разрешения неоднозначности фазы несущей.
12.
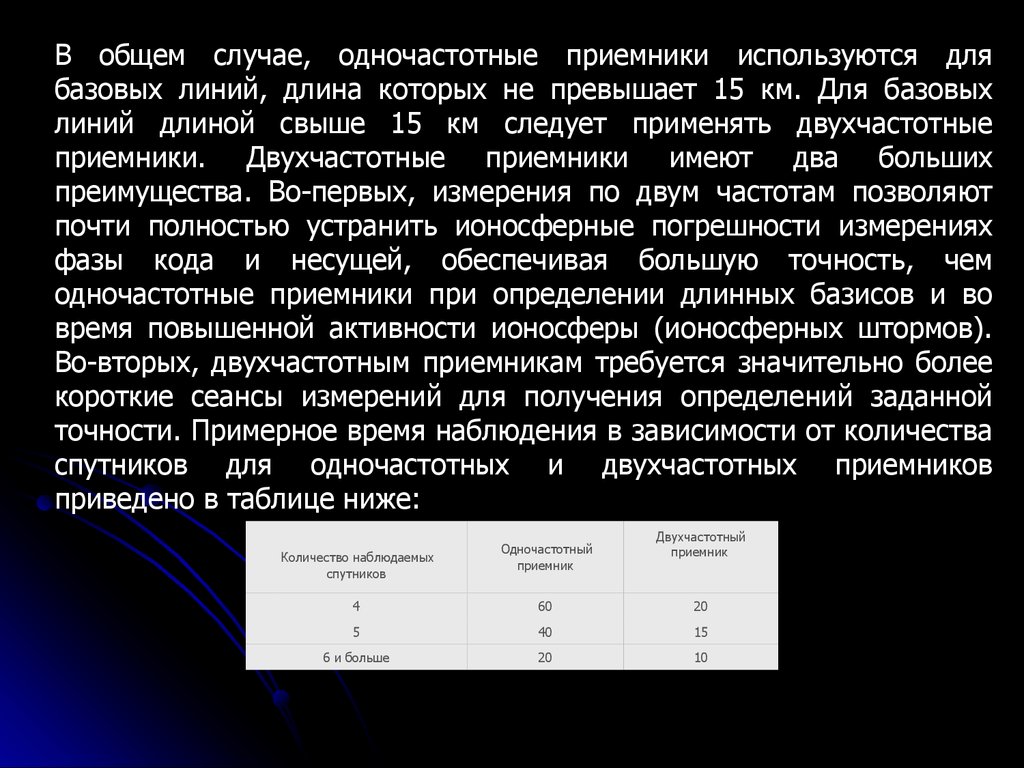
В общем случае, одночастотные приемники используются длябазовых линий, длина которых не превышает 15 км. Для базовых
линий длиной свыше 15 км следует применять двухчастотные
приемники. Двухчастотные приемники имеют два больших
преимущества. Во-первых, измерения по двум частотам позволяют
почти полностью устранить ионосферные погрешности измерениях
фазы кода и несущей, обеспечивая большую точность, чем
одночастотные приемники при определении длинных базисов и во
время повышенной активности ионосферы (ионосферных штормов).
Во-вторых, двухчастотным приемникам требуется значительно более
короткие сеансы измерений для получения определений заданной
точности. Примерное время наблюдения в зависимости от количества
спутников для одночастотных и двухчастотных приемников
приведено в таблице ниже:
Количество наблюдаемых
спутников
Одночастотный
приемник
Двухчастотный
приемник
4
60
20
5
40
15
6 и больше
20
10
13.
Съемка в режиме Быстрая статика отличается только тем, чтовремя съемки одной точки уменьшается до 10-15 минут.
Режимы измерений «стою-иду» (stop & go) и кинематический
(Kinematic) позволяют быстро отнаблюдать большое количество
точек, но требуют, чтобы приемник удерживал захват спутников в
течение всего времени перемещения между точками. На первой
точке необходимо находиться до тех пор, пока не будет собрано
достаточное количество измерений, чтобы разрешить
неоднозначность (период инициализации). После инициализации
приемник может перемещаться между точками до тех пор, пока
поддерживается захват наблюдаемых спутников. Если захват
спутников нарушен, то оператор должен снова оставаться в
стационарном положении до тех пор, пока снова не будет собрано
достаточного для разрешения неоднозначности количества данных.
14.
Режим измерений «стою-иду» (stop & go) является идеальным длямалых площадей, на которых точки наблюдений располагаются
рядом друг с другом и на которых точки наблюдений располагаются
рядом друг с другом и на которых отсутствуют препятствия для
прохождения радиосигналов от спутников. В этом режиме, как
правило, необходимо использовать полевой контроллер для
переключения между режимами «stop» и «go», а так же для
контроля процесса съемки.
15.
Кинематический режим измерений (Kinematic) используется приопределении траектории движущегося приемника относительно
другого неподвижного спутникового приемника. Местоположения
точек вычисляются с заранее установленными интервалами
времени. Кинематический режим является идеальным при
отслеживании траектории движущихся транспортных средств
(например, при профилировании дорог), движущихся судов, при
определении местоположений вынесенных в открытое море
платформ и при позиционировании летящих самолетов.
16.
При использовании режима Кинематическая съемка в реальномвремени (RTK) дифференциальные поправки передаются от базового
приемника одному или нескольким подвижным приемникам с тем,
чтобы они производили местоопределение в режиме реального
времени. В этом режиме необходимо, чтобы базовый приемник имел
встроенный или внешний УКВ либо GSM модем для передачи поправок
на подвижный приемник, который, в свою очередь, тоже должен иметь
соответствующий модем для приема этих поправок. Метод RTK
является самым быстрым методом съемки спутниковыми приемниками,
но менее точным. Он идеально подходит для топографической съемки,
межевания земель, выноса точек в натуру.
17.
Спасибо за внимание!Презентацию подготовил: Крылов М.С.