







































 Промышленность
ПромышленностьПохожие презентации:





")




Автоматизация производства ИВТ
1. Автоматизация производства ИВТ
Лекция 11
2.
Производственный процесс ПП - целенаправленное,постадийное превращение исходного сырья и материалов в
готовый продукт заданного свойства и пригодный к
потреблению или к дальнейшей обработке.
Производственный процесс начинается с его проекта и
заканчивается на стыке производства и потребления, после
чего происходит расходование произведенной продукции.
Основные ПП - связанные непосредственно с превращением
предметов труда в готовую продукцию.
Вспомогательные ПП - способствуют течению основных
процессов.
Технологический процесс ТП - упорядоченная
последовательность взаимосвязанных действий,
выполняющихся с момента возникновения исходных данных
до получения требуемого результата.
2
3.
Различаются следующие типы производства:массовое
серийное
единичное
смешанное.
Серийное производство делится на:
мелкосерийное
среднесерийное
крупносерийное.
3
4. Особенности автоматизации в различных типах производств
45.
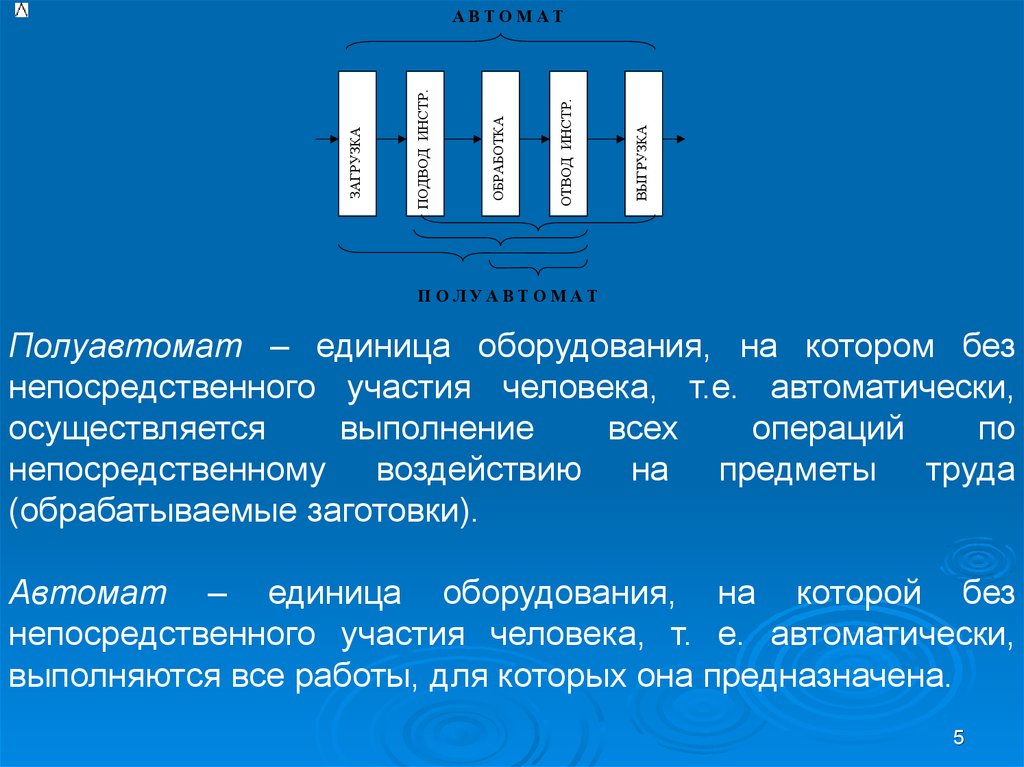
ВЫГРУЗКАОТВОД ИНСТР.
ОБРАБОТКА
ПОДВОД ИНСТР.
ЗАГРУЗКА
АВТОМАТ
ПОЛУАВТОМАТ
Полуавтомат – единица оборудования, на котором без
непосредственного участия человека, т.е. автоматически,
осуществляется
выполнение
всех
операций
по
непосредственному воздействию на предметы труда
(обрабатываемые заготовки).
Автомат – единица оборудования, на которой без
непосредственного участия человека, т. е. автоматически,
выполняются все работы, для которых она предназначена.
5
6.
Применение оборудованияЕдиничное, мелкое и среднесерийное производство –
механизированное и автоматизированное универсальное
оборудование с ручным управлением, оборудование с ЧПУ,
гибкие производственные модули (ГПМ), гибкие
производственные участки (ГПУ).
Крупносерийное и массовое производство –
специальные и агрегатные станки автоматические линии
(АЛ), автоматы и полуавтоматы, гибкие автоматические
линии (ГАЛ).
Сверхмассовое производство – автоматические
роторные линии и автоматические роторно- конвейерные
линии (АРКЛ).
6
7.
Цель автоматизации ТП и ПП- повышение производительности;
- повышение качества;
- улучшений условий труда.
7
8.
АВТОМАТИЗАЦИЯ ТПАвтоматизация загрузки и разгрузки
Автоматическое загрузочно-разгрузочное устройство
(АЗРУ)
- комплекс механизмов, обеспечивающих автоматическое
перемещение заготовок в нужный момент времени с данного
места хранения в рабочую зону станка и после завершения
операции обработки удаление обработанной детали
(полуфабриката) в заданное место хранения или
транспортирования.
8
9.
конструктивные узлы самой рабочей машины;самостоятельные независимые узлы;
приспособления.
Загрузочно-разгрузочные устройства относятся к группе
вспомогательных механизмов, так как сами не участвуют в
собственно технологическом процессе обработки (сборки), т.е.
в процессе изменения состояния предмета труда.
В зависимости от типа используемых заготовок
различают два способа загрузки или питания: непрерывный и
прерывистый или порционный.
9
10.
АЗРУ ДЛЯ НЕПРЕРЫВНОГО СПОСОБАПИТАНИЯ
По способу привода эти устройства могут выполняться:
с независимым (самостоятельным) приводом;
приводимыми от рабочего органа машины.
Блок-схема машины с независимым приводом
САУ
Д1
Д2
ИМ
Р
Р
АЗУ
РО
Привод автоматического загрузочного устройства (АЗУ) осуществляется от
своего двигателя Д1, а рабочих органов РО – от двигателя Д2. Для преобразования
движений служат в каждой ветви редукторы Р, которые управляются
исполнительным механизмом (ИМ). Синхронизация и выработка команд
управления осуществляются системой автоматического управления САУ всего
комплекса.
10
11.
Блок-схема АЗУ с приводом от рабочего органа машиныСАУ
Д
ИМ
Р
АЗУ
РО
Все механизмы работают от одного двигателя Д, который через редуктор Р
сообщает движение рабочему органу машины РО. Последний сообщает движение
собственно автоматическому загрузочному устройству АЗУ, осуществляющему
подачу материала в рабочую зону станка. Синхронизация движений, включение и
выключение РО и АЗУ, а иногда и общего двигателя Д, производятся
исполнительным механизмом ИМ, управляемым системой автоматического
управления САУ, содержащей программу управления и получающей информацию
от АЗУ и РО.
11
12.
По способу захвата эти устройства могут выполняться:крючковые;
клещевые или цанговые;
валиковые (валковые) или роликовые.
Крючковые подающие устройства используются обычно
для подачи ленточного или листового материала,
осуществляя захват материала за технологические или
рабочие отверстия или выступы, получаемые в процессе
обработки (чаще вырубки).
Клещевые или цанговые подающие устройства
характеризуются захватом и перемещением материала за
счет сил трения при возвратно-поступательном движении
механизма подачи.
Валиковые (валковые) или роликовые автоматические
загрузочные устройства осуществляют подачу в рабочую
зону периодическим вращением валиков или роликов.
12
13.
АЗРУ ДЛЯ ПОШТУЧНОГО СПОСОБАПИТАНИЯ
Устройства магазинного питания
Эти устройства осуществляют автоматическую подачу заготовок
предварительно ориентированных и уложенных в магазин вручную.
Иногда такие устройства называют полуавтоматическими.
для деталей сложной формы, автоматическое ориентирование
которых трудно осуществимо или не осуществимо вообще;
для деталей повышенной взаимосцепляемости из-за трудности
их разделения;
для деталей, которые могут быть повреждены (хрупкие,
высокоточные и т.п.) при засыпке их навалом;
при автоматизации загрузки рабочих машин, осуществляющих
длительный цикл обработки, когда применение более сложных и
более производительных бункерных загрузочных устройств
становится нецелесообразным.
13
14.
Состоит из следующих основных узлов:1) накопителя или собственно магазина;
2) отсекателя;
3) питателя;
4) блокирующего механизма;
5) привода загрузочного устройства.
Схема взаимодействия узлов магазинного загрузочного устройства
БЛОКИРУЮЩИЙ
МЕХАНИЗМ
НАКОПИТЕЛЬ
(МАГАЗИН)
ОТСЕКАТЕЛЬ
ПИТАТЕЛЬ
ПРИВОД
Четыре вида движения, или транспортирования, изделий:
1) самотечное – под действием силы тяжести;
2) принудительное – под действием приложенной внешней силы;
3) вибрационное – под действием инерционных сил;
4) комбинированное – сочетающее вышеназванные виды для использования их
различных преимуществ.
14
15.
Устройства бункерного питанияЗапас заготовок сосредотачивается в емкости (бункере)
беспорядочно (навалом).
БЗУ состоит из следующих основных узлов:
собственно бункера (емкости);
механизма захвата;
механизма ориентации;
предохранительного механизма;
магазина или накопителя;
отсекателя;
питателя;
привода.
15
16.
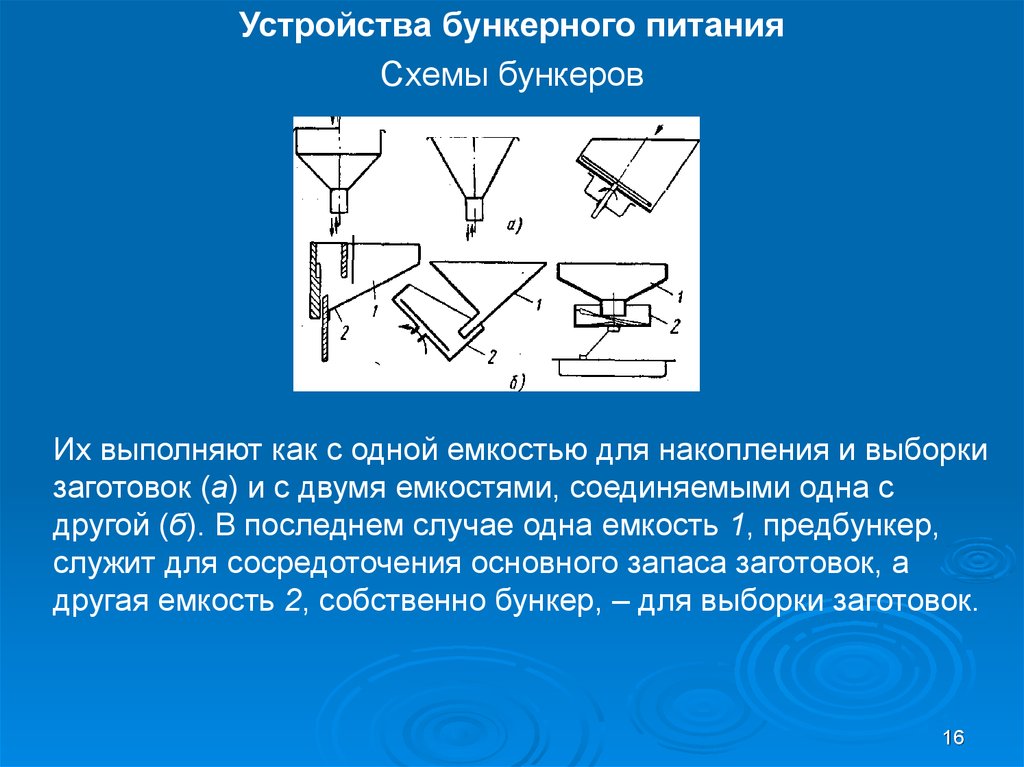
Устройства бункерного питанияСхемы бункеров
Их выполняют как с одной емкостью для накопления и выборки
заготовок (а) и с двумя емкостями, соединяемыми одна с
другой (б). В последнем случае одна емкость 1, предбункер,
служит для сосредоточения основного запаса заготовок, а
другая емкость 2, собственно бункер, – для выборки заготовок.
16
17.
Механизмы захватапредназначены для выборки находящихся в беспорядочном
состоянии заготовок из бункеров.
Разновидности крючковых и штыревых захватных
органов
Для выборки небольших колпачков крючки делают заодно с диском
(б); для цилиндрических колпачков и втулок выполняют с
поворотными крючками (в), которые захватывают заготовки при
тангенциальном расположении крючков 1, а выдают их в лоток при
радиальном расположении 2; для выборки стеклянных заготовок (г),
для низких колпачков (д) захватный орган в виде непрерывного ремня
1, на котором закреплены штыри 2,
17
18.
Разновидности крючковых и штыревых захватныхорганов
Для выборки заготовок со шляпками, шайб
Сечение качающегося сектора (а) , стенки 1 и 2 которого образуют щель. В
нижнем его положении заготовки западают в щель, а в верхнем
соскальзывают в лоток.
Форму и размеры щели выбирают в зависимости от конфигурации
заготовки (а, б, в).
Доска 1 (г), совершающая возвратно-поступательное движение. Верхний
торец доски 2 захватывает заготовки 3 в бункере и транспортирует их
вверх, где они скатываются и западают в щель лотка 4.
Захваты в виде лопастей 1, закрепленных на барабане 2, лоток 3 (д).
е - круговая щель 5, образованная дном бункера 4 и вращающимся диском
3, в которую западают заготовки 1, захватываются и транспортируются
18
подпружиненными собачками 2.
19.
Механизм ориентации и первичной ориентацииСечение качающегося сектора (а) , стенки 1 и 2 которого образуют щель. В
нижнем его положении заготовки западают в щель, а в верхнем
соскальзывают в лоток.
Форму и размеры щели выбирают в зависимости от конфигурации
заготовки (а, б, в).
Доска 1 (г), совершающая возвратно-поступательное движение. Верхний
торец доски 2 захватывает заготовки 3 в бункере и транспортирует их
вверх, где они скатываются и западают в щель лотка 4.
Захваты в виде лопастей 1, закрепленных на барабане 2, лоток 3 (д).
е - круговая щель 5, образованная дном бункера 4 и вращающимся диском
3, в которую западают заготовки 1, захватываются и транспортируются
19
подпружиненными собачками 2.
20.
Механизм ориентации и первичной ориентацииа, б, в, г, д - заготовки типа валиков и дисков;
е - заготовки типа втулок и валиков;
ж - заготовки типа дисков, пластин.
з - центробежных БЗУ.
20
21.
Вибрационные бункерные загрузочные устройства1 – чаша;
2 – спиральный лоток;
3 – днище чаши;
4 – подвески;
5 – основание;
6 – электромагнит;
7 – якорь;
8 – амортизатор;
9 – реостат.
1 – верхний башмак;
2 – пружины наклонные;
3 – электромагнит;
4 – подвески;
5 – нижний башмак;
6 – резиновая втулка;
7 – основание;
8 – плита;
9 – катушка;
10, 14 – якорь;
11 – днище;
12 – конус;
13 – чаша;
15 – прокладка.
21
22.
АВТОМАТИЧЕСКИЙ КОНТРОЛЬБез автоматизации контроля нельзя создать
автоматических линий, цехов и заводов, работающих
полностью по автоматическому циклу.
Погрешности
Систематические:
износ инструмента
Случайные:
погрешности оборудования
колебания режимов
погрешности инструмента
недостатки приспособления
неоднородность материала
ошибки рабочего
погрешности измерения
22
23.
Процесс контроля состоит из следующих этапов:- измерение контролируемого параметра (размер,
температура и т.п.);
2. - сравнение его с заданным значением;
3. - принятие решения о соответствии контролируемого
параметра заданному и выработка необходимой команды;
4. - реализация решения (команды) с помощью
соответствующего исполнительного органа.
1.
23
24.
Параметры контроля в производстве:линейные и реже угловые размеры обрабатываемых деталей;
геометрические параметры деталей, такие как прямолинейность,
перпендикулярность, соосность, конусность, огранка и т.п.;
качество обработанной поверхности – шероховатость и т.п.;
физические свойства обрабатываемых деталей:
механические – упругость, твердость, усталостная прочность;
магнитные – магнитное сопротивление, магнитная проницаемость,
коэрцитивная сила;
электрические – электросопротивление (электропровод-ность);
коррозионная стойкость;
и т.д.;
потребляемая мощность на технологический процесс;
параметры технологического процесса – усилия, давление, темп-ра;
экономические показатели – производительность, чистое время работы
машин, станков, оборудования.
24
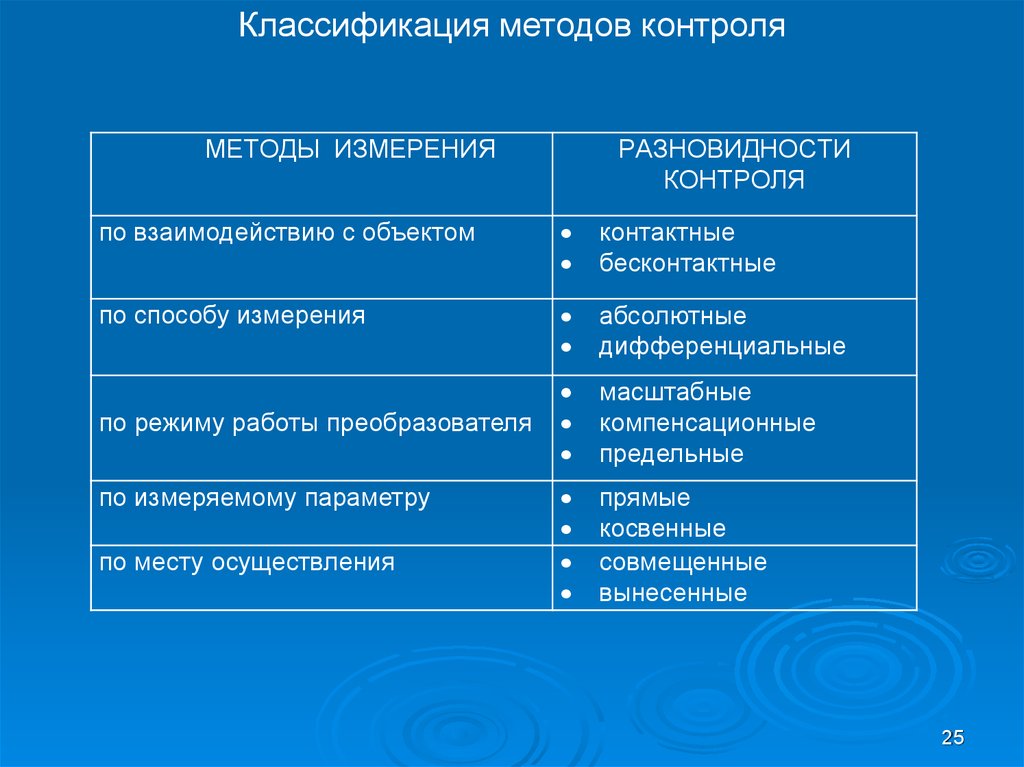
25.
Классификация методов контроляМЕТОДЫ ИЗМЕРЕНИЯ
РАЗНОВИДНОСТИ
КОНТРОЛЯ
по взаимодействию с объектом
контактные
бесконтактные
по способу измерения
абсолютные
дифференциальные
масштабные
компенсационные
предельные
прямые
косвенные
совмещенные
вынесенные
по режиму работы преобразователя
по измеряемому параметру
по месту осуществления
25
26.
Три метода измерения:масштабный
- выходной сигнал
пропорционален измеряемому параметру;
компенсационный - сравнение измеряемого параметра с
эталонным (чувствительный элемент датчика должен
зафиксировать равенство их величин);
предельный
уровень.
-. настраивается на необходимый
26
27.
ДАТЧИКИ- преобразуют измеряемые физические величины в сигналы,
удобные для дальнейшей передачи в измерительные или
управляющие устройства.
Датчики
Параметрические преобразуют контролируемую величину в
параметры электрической цепи: проводимость, индуктивность, емкость (потенциометрические, индуктивные, емкостные, тензометрические и др).
Генераторные преобразуют неэлектрическую энергию в
электрическую энергию (термоэлектрические, фотоэлектрические, пьезоэлектрические и тахометрические).
27
28.
Потенциометрические датчики- преобразуют измеряемые физические величины в сигналы,
удобные для дальнейшей передачи в измерительные или
управляющие устройства.
Потенциометрические преобразователи:
а – с угловым перемещением контакта;
б – с линейным перемещением контакта;
в – включенный по схеме делителя
напряжения.
28
29.
Индуктивные датчики- преобразуют малые линейные или угловые перемещения в
электрические сигналы. Принцип их действия основан на
зависимости индуктивного сопротивления катушки от изменения
зазора в магнитопроводе, от перемещения магнитопровода в
катушке или от изменения площади зазора.
а — с подвижным якорем; б — с перемещающимся сердечником;
в — с изменяющейся площадью зазора; г — дифференциальный.
1 – подвижный якорь; 2 – магнитопровод; 3 – катушка индуктивности;
δ – измениемый воздушный зазор (до 2 мм).
Недостатки: нереверсивность статической характеристики; небольшой диапазон перемещения якоря; наличие тока холостого хода; влияние колебаний амплитуды и частоты
напряжения питания.
29
30.
Дифференциальные индуктивныепреобразователи
- обладают более высокими точностью и чувствительностью.
Их статическая характеристика линейна и реверсивна.
Дифференциальный
трансформаторный
преобразователь
1 – стержень магнитопровода;
2 – первичная обмотка;
3 – вторичная обмотка;
4 – якорь.
Ферродинамический
преобразователь
1 – шихтованное ярмо;
2 – полюсные наконечники;
3 – сердечник;
4 – поворотная рамка;
5 – обмотка возбуждения.
30
31.
Емкостные датчики- преобразуют неэлектрические величины (перемещение, уровень
жидкости, влажность, усилие и т. д.) в изменение электрической
емкости.
а — с переменным расстоянием между пластинами;
б — с изменяемой площадью цилиндрический;
в — с изменяемой площадью плоский;
г — с изменением диэлектрической постоянной.
δ — перемещение; α—угол поворота пластин; h—высота уровня жидкости: Н — высота
пластин датчика
31
32.
Тензометрические датчики- изменение электрического сопротивления проводников при
упругих деформациях растяжения или сжатия.
ΔR = k∙ε∙R
ΔR — изменение электросопротивления;
k — коэффициент чувствительности (зависит от вида материала и технологии
изготовления преобразователя);
ε
— относительная деформация;
R —номинальное сопротивление датчика.
а – проволочные: 1 - проволока; 2 - подложка
из тонкой бумаги или лаковой пленки; 3 приваренные выводы.
б – с медными перемычками: 4 - тонкие
полоски медной фольги.
в – фольговые: напыление (фотолитография)
толщиной 4 ... 12 мкм.
32
33.
Фотоэлектрические датчики- фотоэлектрический эффект, т. е. они реагируют на
изменение светового потока.
а – с внешним фотоэффектом: 1 – катод; 2 – анод;
б – с внутренним фотоэффектом;
в - вентильные: 1 – пленка золота; 2 – запирающий слой; 3 – селеновый слой;
4 – стальная прокладка.
33
34.
ГПС (гибкая производственная система)– это автоматизированное производство,
построенное на современных технических
средствах.
Функционально элементы ГПС можно разделить на 2
группы.
1. производствено - технологические функциональные
элементы ГАП, составляющие производствено
технологическую часть ГПС;
2. электронно - вычислительные функциональные
элементы ГАП, составляющие информационно вычислительную и управляющую часть ГПС.
34
35.
ГПМ- это единица технологического оборудования с ЧПУ для производства изделий произвольной номенклатуры, автономно функционирующая и автоматическиосуществляющая все функции, связанные с изготовлением продукции и имеющая
возможность встраиваться в более сложную ГПС.
РТК- это совокупность единиц технологического оборудования (от 3-х до 10-ти
станков с ЧПУ), промышленных роботов и средств их оснащения (устройства накопления, ориентации, поштучной выдачи деталей и т. д.), автономно функционирующих и осуществляющих многократные циклы с автоматической переналадкой и
возможностью встраиваться в ГПС.
ГПК- это ГПС, состоящая из нескольких ГПМ или РТК и объединенная
автоматической системой управления (АСУ), автоматизированной транспортно складкой системой (АТСС), автономно функционирующая в течении заданного
времени и способная встраиваться в систему с более высоким уровнем автома35
тизации.
36.
ГАЛ- это ГПС, состоящая из нескольких ГПМ или РТК, объединенных АСУ, вкоторой
технологическое
оборудование
располагается
в
принятой
последовательности технологических операций вдоль АТНС (автоматизированной
транспортно - накопительной системы)
ГАУ- это ГПС, состоящая из нескольких ГПМ, РТК, ГАЛ и отдельных единиц
специального технологического оборудования, АТНС, объединенных АСУ в гибкий
участок, в котором предусмотрено изменение последовательности использования
оборудования в пределах заданного технологического маршрута.
ГАЦ- это ГПС, объединяющая ГАУ (или ГАЛ), вспомогательные участки и
отдельные ГПМ, РТК, АТСС и управляемая автоматизированной системой.
ГАЗ - это ГПС, состоящая из ГАЦ заготовительного производства, ГАЦ
обрабатывающих и сборочных стадий, автоматизированных складов материалов,
заготовок,
комплектующих
изделий,
готовых
деталей
и
изделий,
автоматизированной транспортной системы, объединенных АСУ.
36
37.
В ГПМ входят:1. специальное технологическое оборудование с ЧПУ (1-3 станка)
2. контрольно – измерительная аппаратура и установки
3. промышленные роботы и манипуляторы
4. средства автоматизации техпроцесса.
5. средства идентификации деталей, заготовок, оснастки и инструментов
Основные требования к ГПМ, работающим в режиме безлюдной технологии:
1. управление от ЭВМ
2. наличие магазина инструментов
3. наличие конвейера для сбора стружки
4. автоматический зажим и разжим заготовки в патроне станка
Дополнительные требования:
1. возможность автоматической переналадки патрона по программе
2. возможность регулировки силы зажима заготовки в зависимости от ее
жесткости.
37
38.
Основные понятия и определенияАвтоматика
наука,
которая
занимается
математическими моделями автоматических устройств, таких
как поведение выходного звена, в зависимости от изменения
состояния входного.
Автоматизация
–
комплекс
мероприятий
по
внедрению автоматизированных устройств в производстве.
Предмет автоматизации – совокупность различных
тенденций и методов внедрения автоматизированных
устройств взамен ручных.
Автоматизация – высшая стадия механизации.
Механизация – замена мускульного труда человека на
неживой труд источника движения.
38
39.
На долю человека при этом возлагаютследующие функции:
Наладка
Контроль
Управление
Автоматизация отличается от механизации
исключением человека из управления
39
40. Жизненный цикл изделия.
Пусть, за период существования изделия, напредприятии было выпущено:
b – партий изделия;
n- штук в каждой;
t1 – время, затраченное на механическую обработку одного
изделия;
t2 - время, затраченное на подготовку выпуска партии изделий
(установка или замена старого приспособления на новое,
ознакомление наладчика с чертежом и т.п.);
t3 - время, затраченное на проектирование данного изделия,
(конструкторский период, технологический период,
адаптационный период).
40
41.
Совокупные затраты времени по производству партиидеталей.
Тпарт =