












 приемники")









 География
География Строительство
СтроительствоПохожие презентации:
")

")






")
Нивелиры. Гидростатические нивелиры, оптические нивелиры, цифровые нивелиры, лазерные нивелиры (построители плоскости)
1. Нивелиры
Гидростатические нивелиры, оптические нивелиры, цифровыенивелиры, лазерные нивелиры (построители плоскости)
2. Гидростатический нивелир
Применение:• Производство и контроль выполнения строительных и ремонтных работ .
• Контроль динамических процессов (в том числе непрерывный
автоматический контроль)
Преимущества:
• Простота в использовании
• Нет необходимости в прямой видимости
• Относительно невысокая цена
Недостатки:
• Низкая точность (простые модели)
3. Оптические нивелиры
Основной прибор для нивелирования.Применение:
• Строительство, дорожное строительство
• Развитие сетей ГГС
Преимущества:
• Простота
• Надежность
• Широкий диапазон точностей
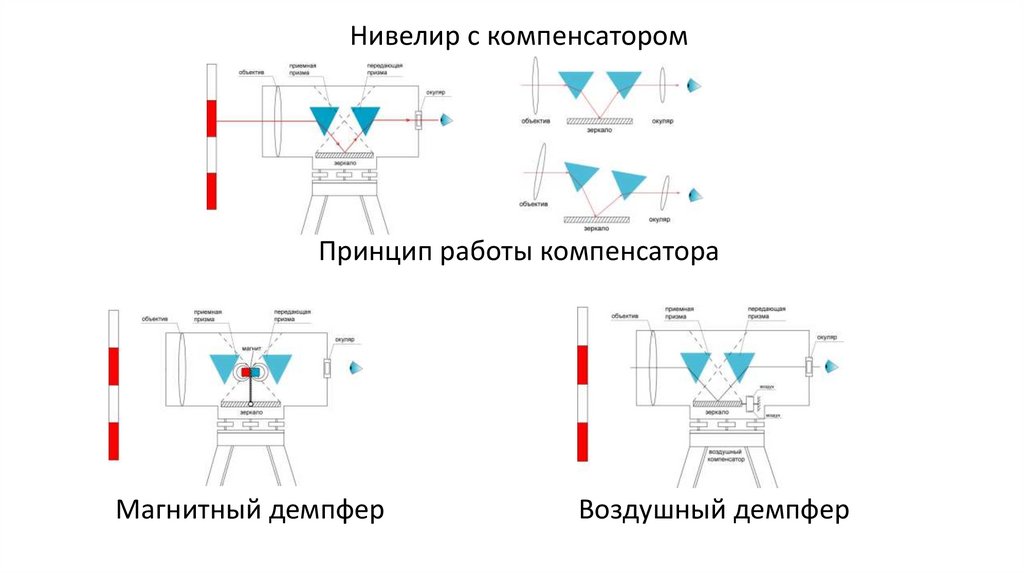
4.
Нивелир с компенсаторомПринцип работы компенсатора
Магнитный демпфер
Воздушный демпфер
5. Цифровые нивелиры
Преимущества• Высокие показатели скорости выполнения работ
• Измерения превышения (и расстояния) нажатием кнопки
• Наличие встроенной памяти (нет необходимости ведения журнала)
• Возможность получения результатов уравнивания сразу
Недостатки
• Цена
• Работа с штрих-кодовыми рейками
6. Лазерные нивелиры
Широкий спектр применения на стройплощадке .Позиционные нивелиры
Преимущества
• Самовыравнивающейся уровень
• Возможность работы в одиночку
• Визуальное обнаружение плоскости
• Дальность работы до 900 метров
Недостатки
• Сложно обнаружить луч при сильном освещении
Ротационные нивелиры
7.
8.
Управление техникой GNSS или тахеометр9. Тахеометры, теодолиты
• Тахеометр – измерение углов и расстояний(вычисление координат и горизонтального
проложения)
• Теодолит – измерение углов…
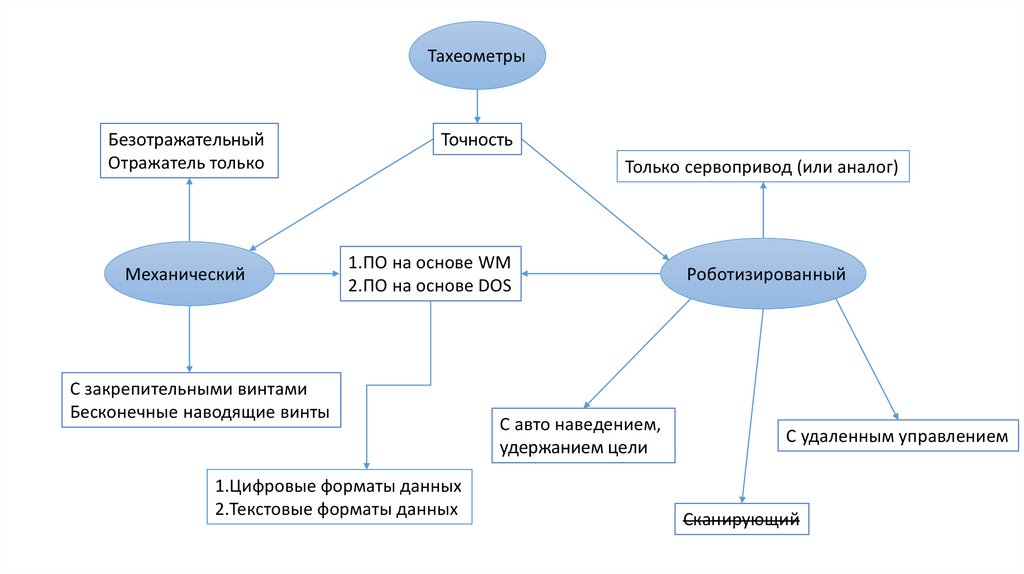
10.
ТахеометрыБезотражательный
Отражатель только
Механический
Точность
Только сервопривод (или аналог)
1.ПО на основе WM
2.ПО на основе DOS
С закрепительными винтами
Бесконечные наводящие винты
1.Цифровые форматы данных
2.Текстовые форматы данных
С авто наведением,
удержанием цели
Роботизированный
С удаленным управлением
Сканирующий
11. Дальномер фазовый и импульсный
Импульсный дальномер – с помощью излучателя и приемника определяетвремя прохождения луча до объекта.
Фазовый дальномер – определение разности фаз выпущенного и
принятого модулированного сигнала.
12.
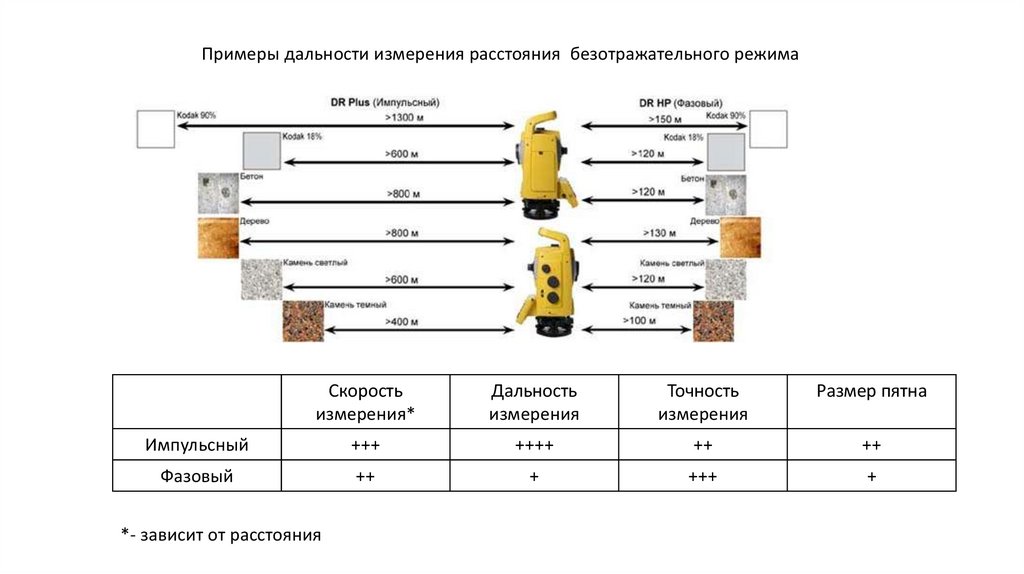
Примеры дальности измерения расстояния безотражательного режимаСкорость
измерения*
Дальность
измерения
Точность
измерения
Размер пятна
Импульсный
+++
++++
++
++
Фазовый
++
+
+++
+
*- зависит от расстояния
13. Контроллеры тахеометров разных платформ
На базе ОСDOS
НА базе ОС
WM
Энергопотребление
+
++
Функционал
++
++++
Коммуникации
+
+++
«Надежность»
+++
+
14. Роботизированные тахеометры
Роботизированный тахеометр – разновидность тахеометра,вращение которого осуществляется с помощью встроенных
сервоприводов (или аналогов).
• Высокая скорость вращения
• Автоматическое наведение на отражатель
• Захват и удержание отражателя
• Возможность работы одному исполнителю
• Возможность автоматического сбора данных
(сканирование)
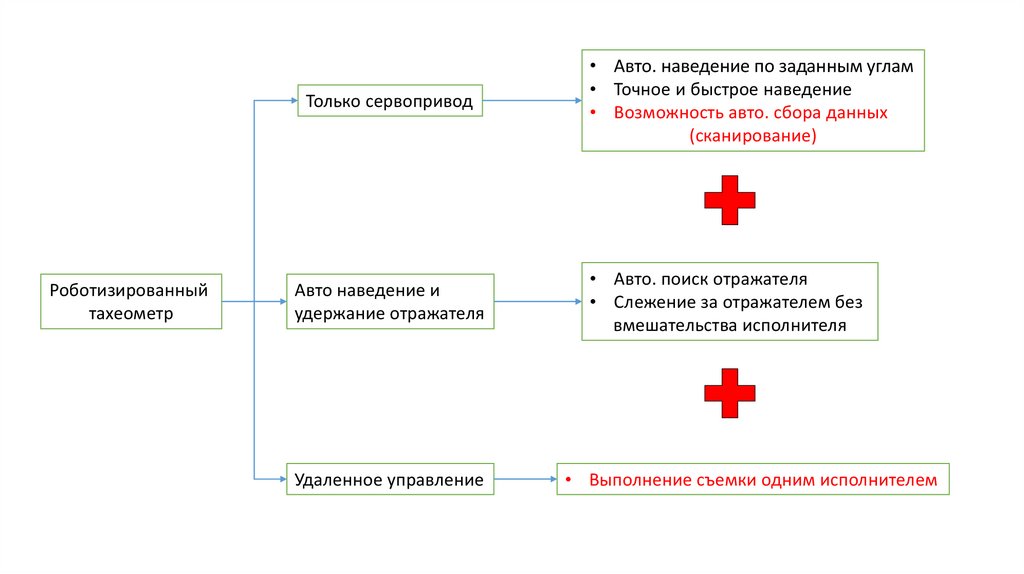
15.
Только сервоприводРоботизированный
тахеометр
Авто наведение и
удержание отражателя
Удаленное управление
• Авто. наведение по заданным углам
• Точное и быстрое наведение
• Возможность авто. сбора данных
(сканирование)
• Авто. поиск отражателя
• Слежение за отражателем без
вмешательства исполнителя
• Выполнение съемки одним исполнителем
16.
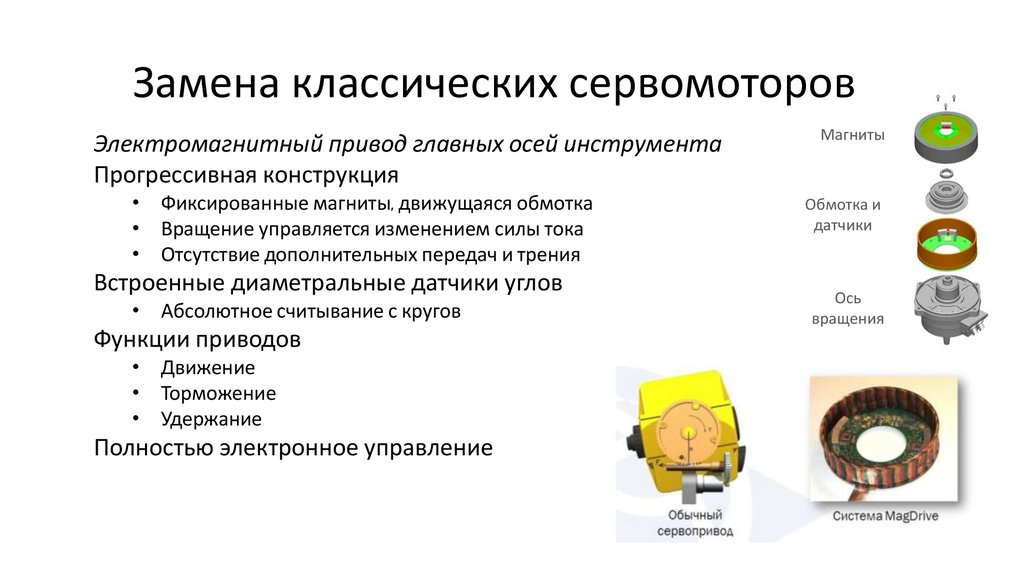
Замена классических сервомоторовЭлектромагнитный привод главных осей инструмента
Прогрессивная конструкция
• Фиксированные магниты, движущаяся обмотка
• Вращение управляется изменением силы тока
• Отсутствие дополнительных передач и трения
Встроенные диаметральные датчики углов
• Абсолютное считывание с кругов
Функции приводов
• Движение
• Торможение
• Удержание
Полностью электронное управление
Магниты
Обмотка и
датчики
Ось
вращения
17.
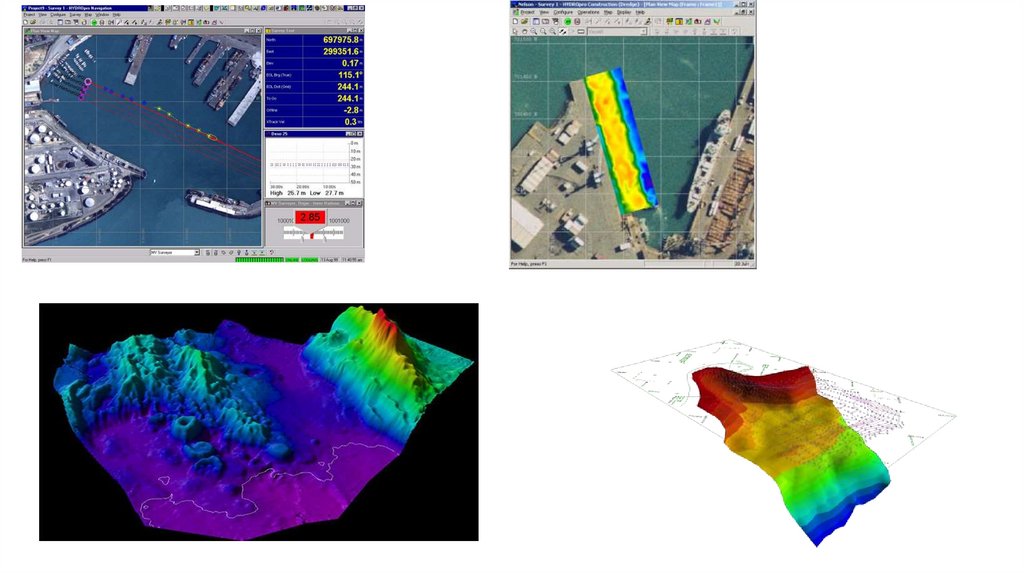
3D сканеры3D сканер – прибор для измерения вертикальных горизонтальных углов и расстояний, но в отличии
от тахеометра способен собирать миллионы точек в минуту против десятков у тахеометров.
• Высокая скорость сбора данных
• Высокая точность и кучность сбора данных
• Автоматическое создание 3D модели объекта
18. Сферы применения
▪ Геодезия– Земельный кадастр
– Инжиниринг
▪ Картография
▪ Архитектура
▪ Криминалистика и
общественная безопасность
▪ Строительные подрядчики
19.
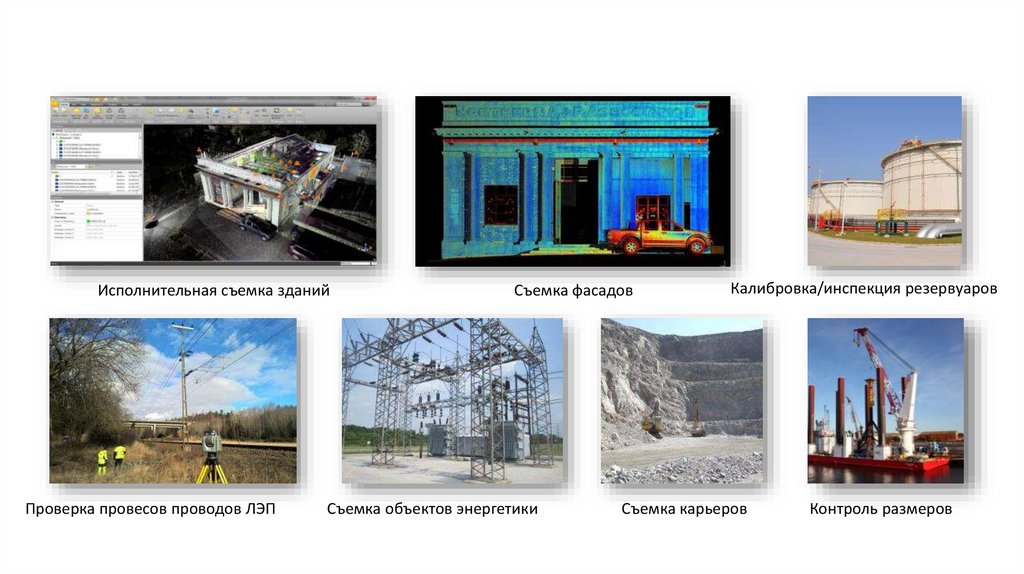
Исполнительная съемка зданийПроверка провесов проводов ЛЭП
Съемка фасадов
Съемка объектов энергетики
Калибровка/инспекция резервуаров
Съемка карьеров
Контроль размеров
20.
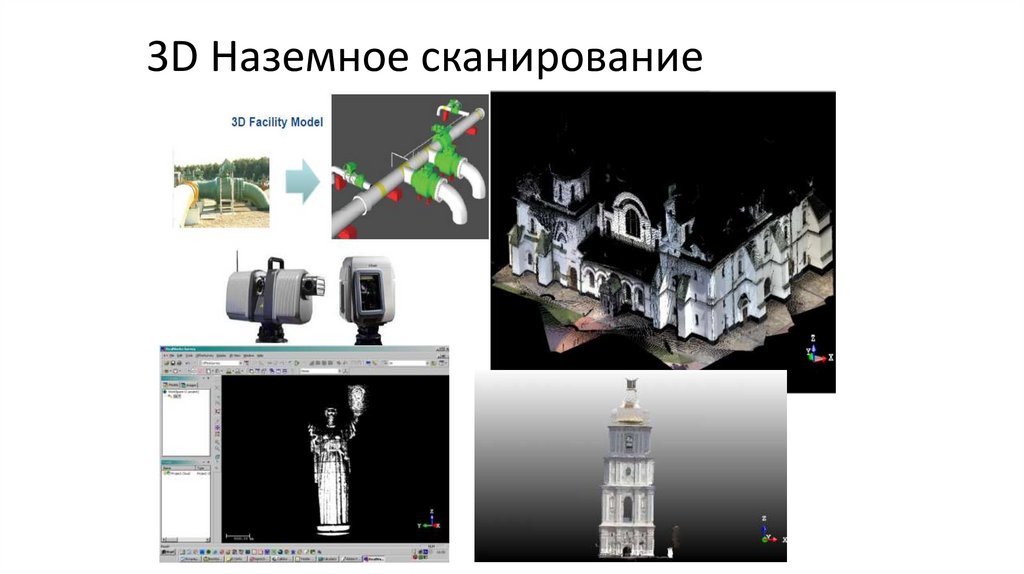
3D Наземное сканирование21.
3D Наземные мобильное сканирование22. GNSS (GPS) приемники
GPS (Global Positioning System, рус. глобальная система позиционирования) – спутниковаянавигационная система для определения координат, времени. Первая и единственная полноценно
функционирующая система.
• ГЛОНАСС – Российский аналог GPS
• GALILEO – Европейский аналог GPS
• BEIDOU – Китайский аналог GPS, включает геостационарные спутники для покрытия территории Китая
GNSS (Global Navigation Satellite Systems, рус. глобальная система спутниковой навигации ) –
совокупность всех систем навигации, включая геостационарные системы.
23. Принцип работы, фазовый метод
Статика, PPKRTK
RTCM (Radio Technical Commission for Maritime Services рус.
радиотехническая комиссия морских сервисов) – организация занимающаяся
стандартизацией радиотехнических средств морской навигации,
связи и родственных технологий.
NTRIP (Networked Transport of RTCM via Internet Protocol рус сетевая передача RTCM
через интернет) – ПО для размножения потоков данных и их администрирование
24. Статика или РРК с временной базовой станцией
RTK с временной базовой станциейRTK с перманентной базовой станцией
410-470 МГц
Ровер
Ровер
База
База + модем
(радио)
Ровер
Ровер
Internet
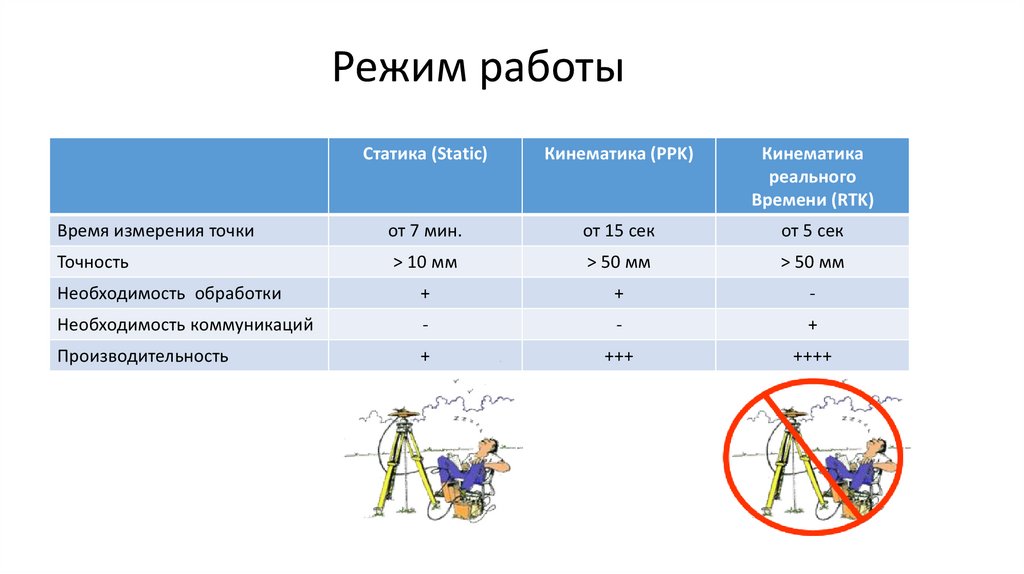
25.
Режим работыСтатика (Static)
Кинематика (PPK)
Кинематика
реального
Времени (RTK)
Время измерения точки
от 7 мин.
от 15 сек
от 5 сек
Точность
> 10 мм
> 50 мм
> 50 мм
Необходимость обработки
+
+
-
Необходимость коммуникаций
-
-
+
Производительность
+
+++
++++
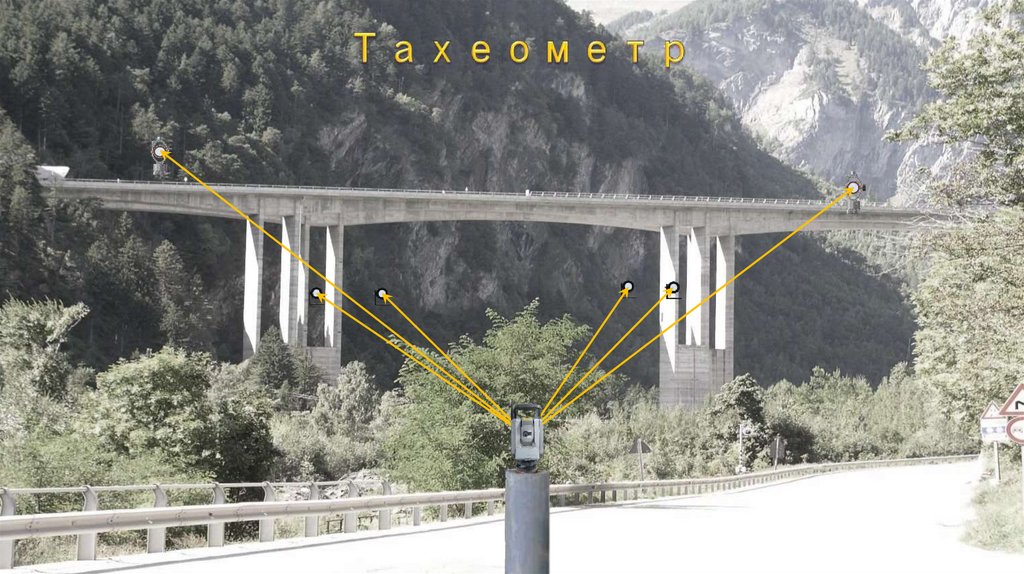
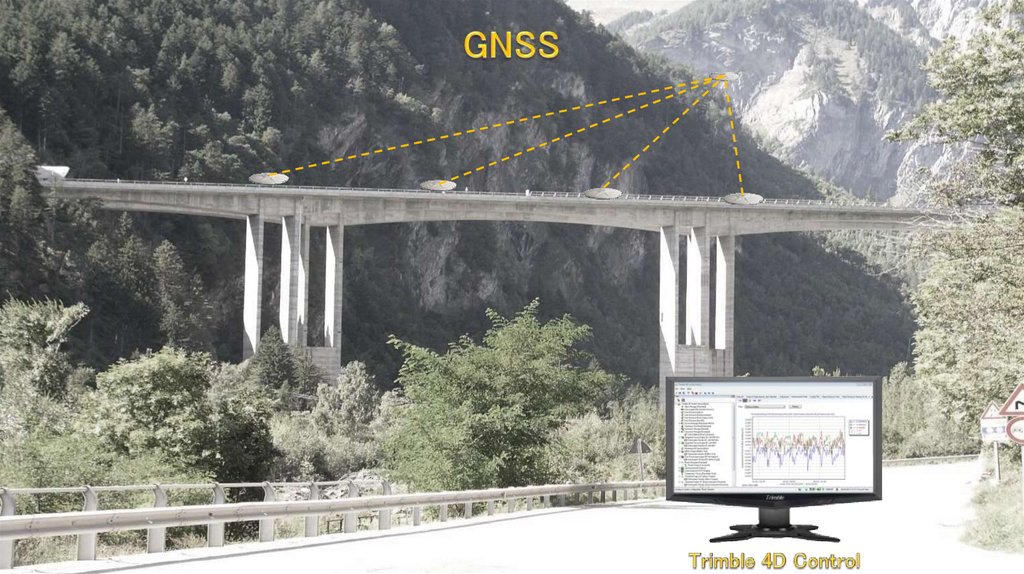
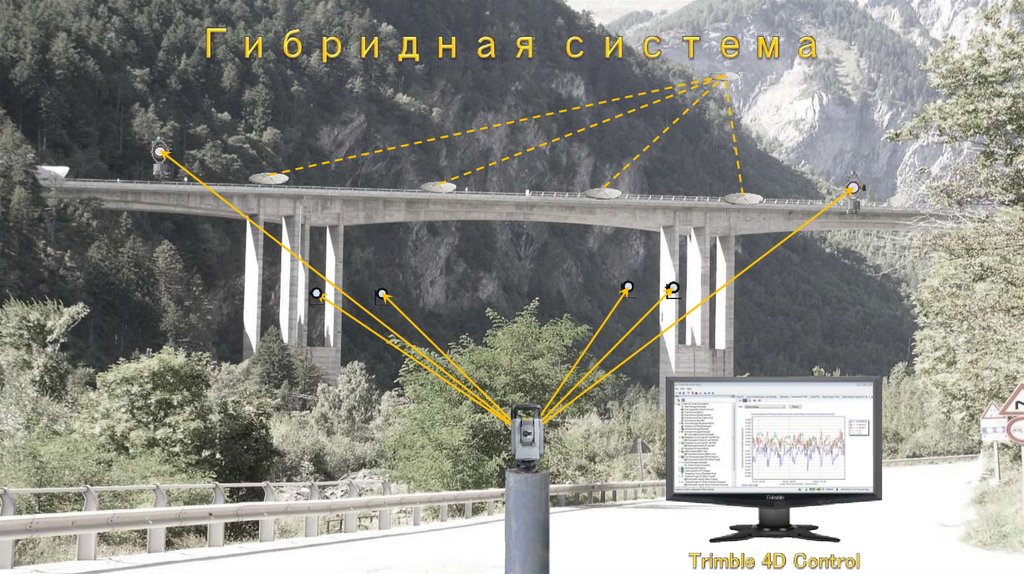
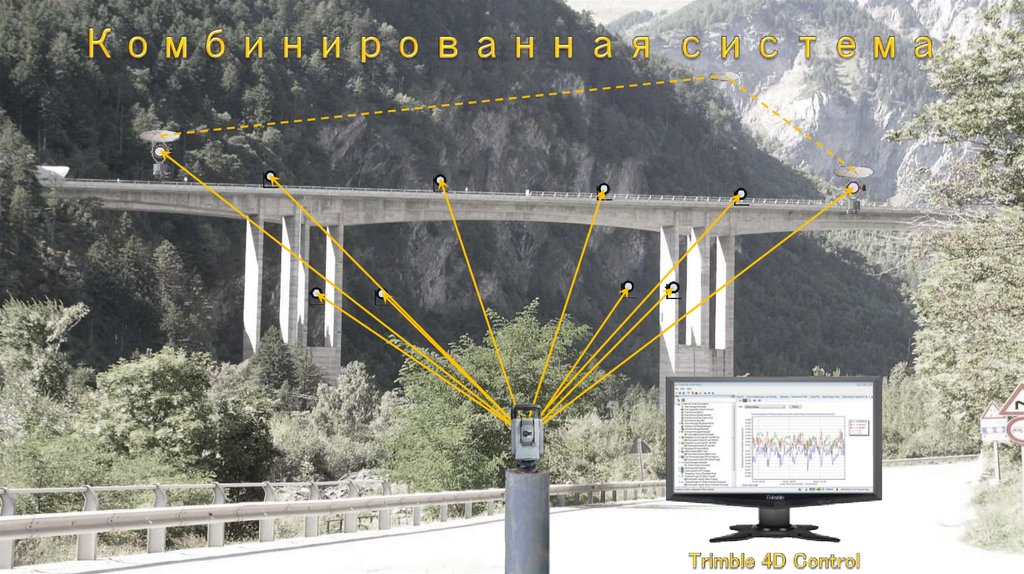
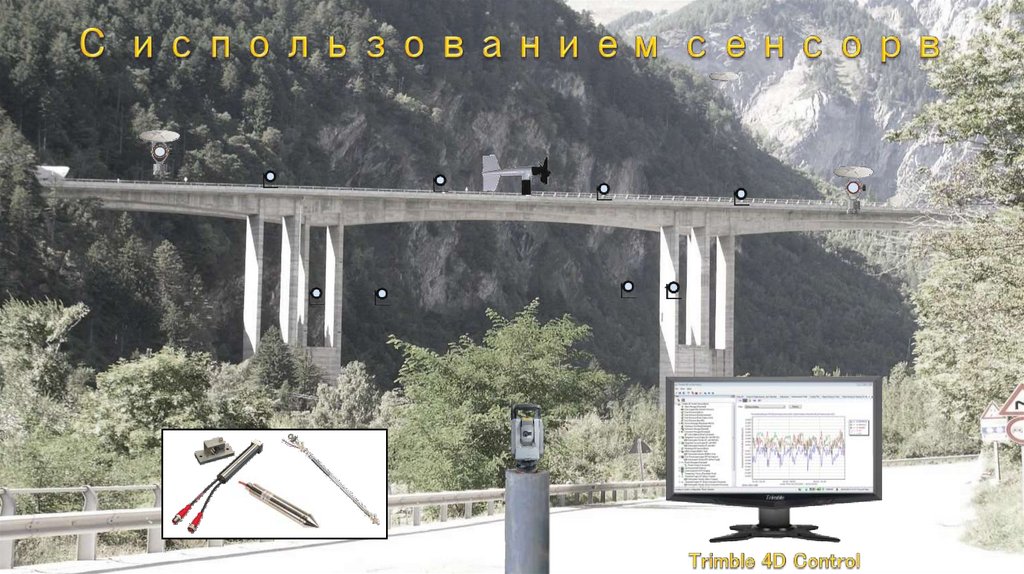
26. Мониторинг
Для решения задач мониторинга используют:• Высокоточные нивелиры (>1 мм/км дв.хода)
• Высокоточные тахеометры (>2”, >2+2 ppm)
• GNSS оборудование CORS (8+1ppm)
• Датчики наклона, барометры, экстензометры, датчики трещин,
тензодатчик
• Метеостанции
27.
28.
29.
30.
31.
32. Обработка данных
• Сигнал тревоги при необходимости
• Прогнозирование изменений и их учет
Визуализация измерений
Передача данных в онлайн режиме
Полная автономность
Доступ к данным через интернет
33. Центральный вокзал Цюрих, Швейцария
Оптическиймониторинг в
реальном
времени
34. Дюссельдорф, Германия
35.
Подземное сканированиеПоиск подземных объектов, коммуникаций, полостей
Для данных работ используют:
• Георадары
• Трассоискатели
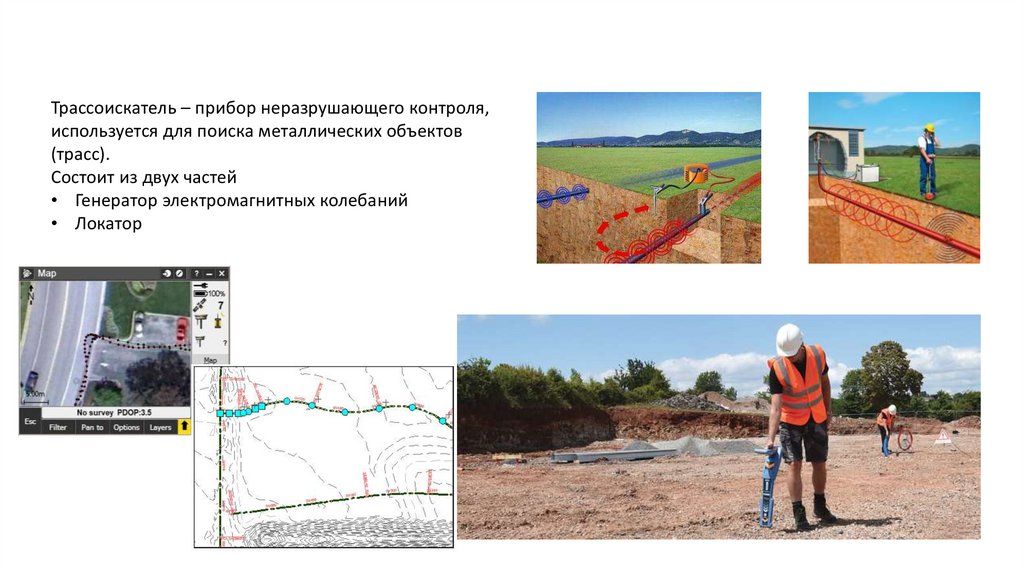
36.
Трассоискатель – прибор неразрушающего контроля,используется для поиска металлических объектов
(трасс).
Состоит из двух частей
• Генератор электромагнитных колебаний
• Локатор
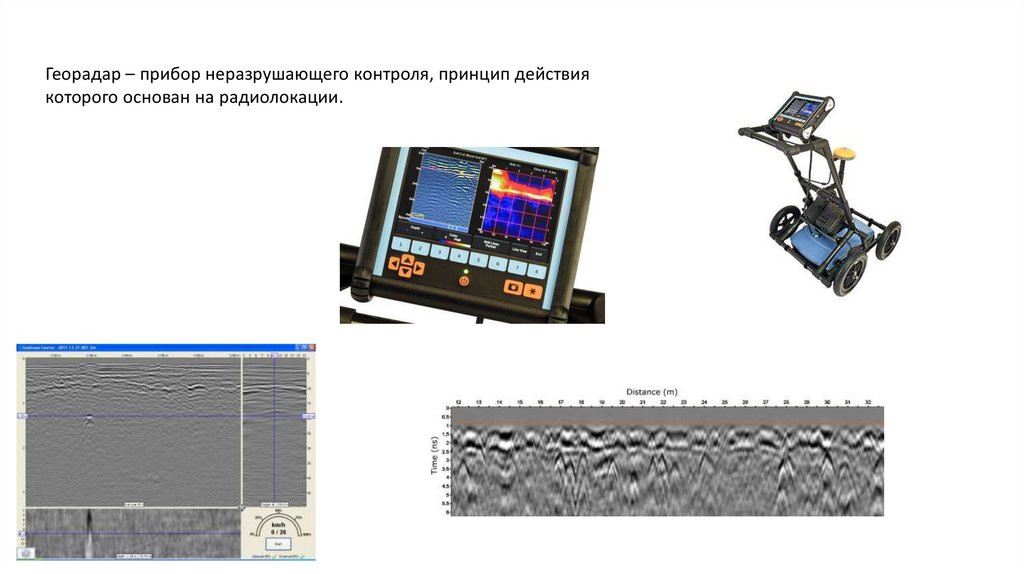
37.
Георадар – прибор неразрушающего контроля, принцип действиякоторого основан на радиолокации.
38.
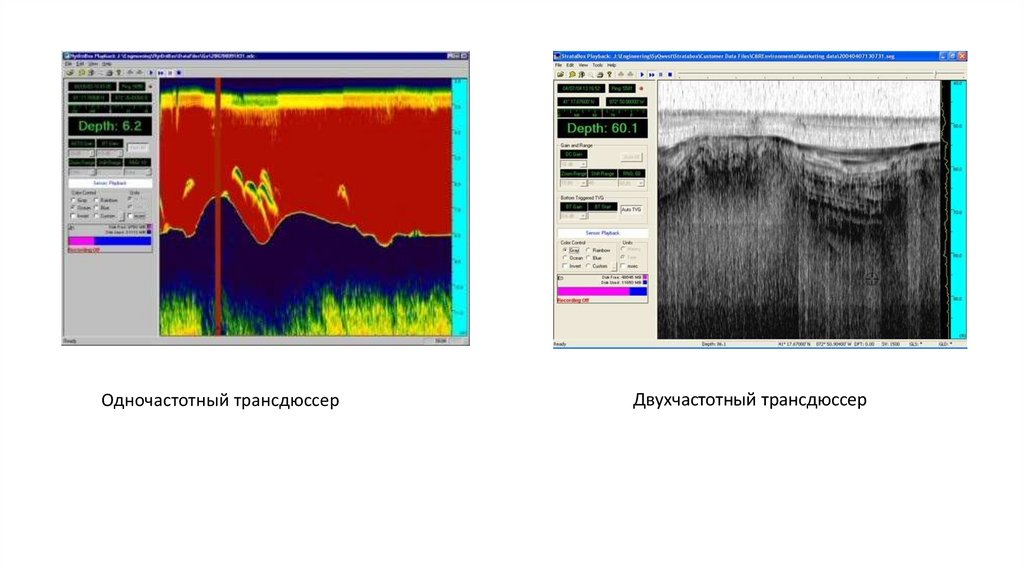
Съемка дна с помощью эхолотаЭхолот (гидролокатор) – прибор генерирующий звуковые
импульсы для измерения расстояний под водой.
Измерение глубины от 30 см до 800 м
Измерение глубины с частотой 10-100 Гц
Двух частотные трансдюссеры
Объединение с GNSS в единую систему
Передача и запись данных на ПК
39.
NMEA 0183 (от «National Marine Electronics Association») — стандарт определяющий текстовый протоколсвязи морского (как правило, навигационного) оборудования (или оборудования, используемого в поездах)
между собой.
Формат dbs, глубина ниже поверхности.
$ S D D B S , x x x . x , f , x x x . x x , M , x x . x , F где x x x . x = feet (f) x x x . x x = meters (M) x x . x = fathoms (F)
Формат GGA, координаты время и качество
40.
Одночастотный трансдюссерДвухчастотный трансдюссер