




















 Программное обеспечение
Программное обеспечениеПохожие презентации:










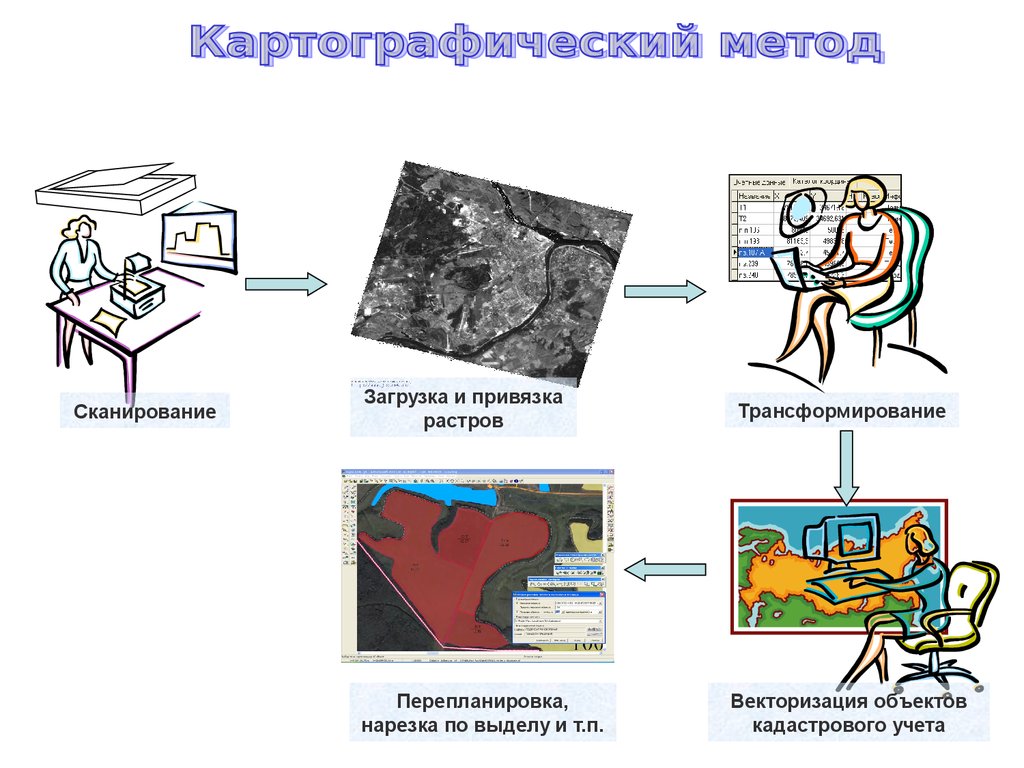
Картографический метод
1.
СканированиеЗагрузка и привязка
растров
Перепланировка,
нарезка по выделу и т.п.
Трансформирование
Векторизация объектов
кадастрового учета
2.
Получениеортофопланов
Векторизация
объектов
Перепланировка,
нарезка по выделу и т.п.
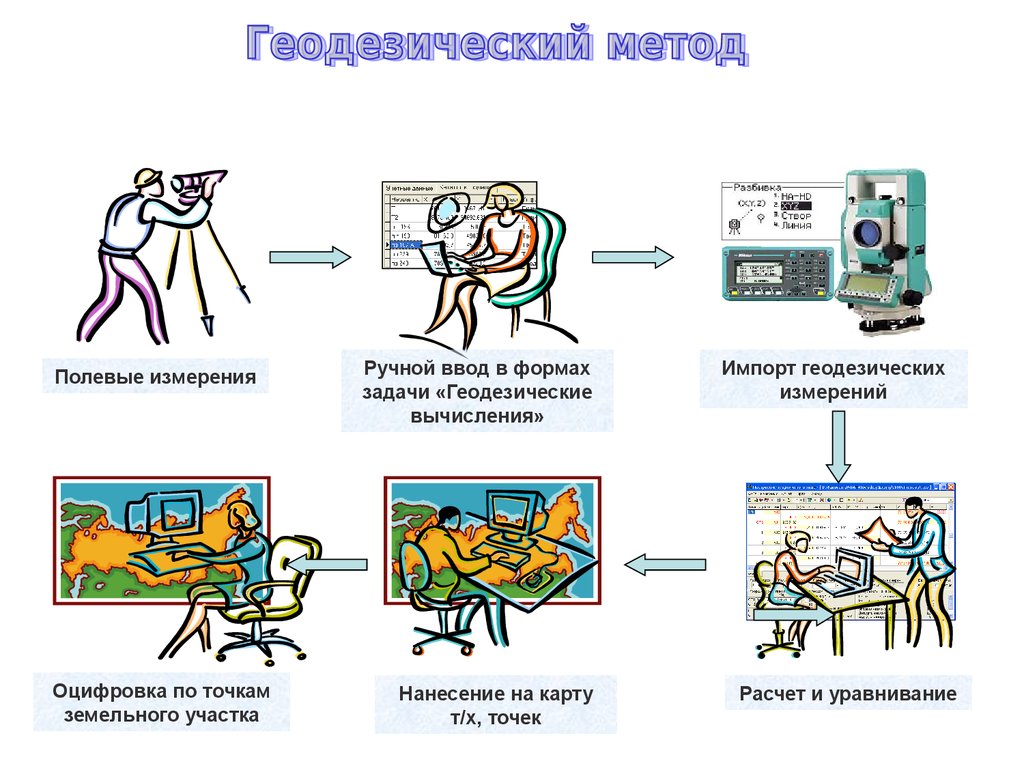
3.
Полевые измеренияОцифровка по точкам
земельного участка
Ручной ввод в формах
задачи «Геодезические
вычисления»
Нанесение на карту
т/х, точек
Импорт геодезических
измерений
Расчет и уравнивание
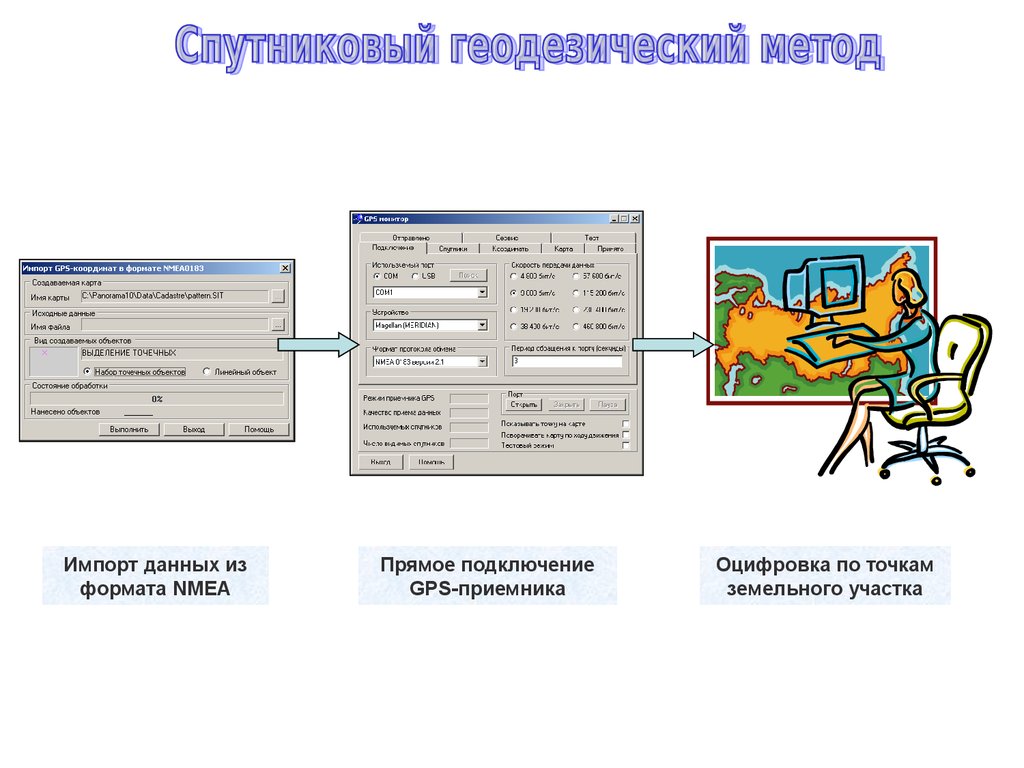
4.
Импорт данных изформата NMEA
Прямое подключение
GPS-приемника
Оцифровка по точкам
земельного участка
5.
Фотоснимки бывают трех видов:аэрофотоснимки
наземные фотоснимки
космические фотоснимки
Для получения снимков, кроме фотоаппаратов могут
применяться
съемочные
системы:
радиолокационные,
тепловые, сканерные и другие. Изображение этими системами
строится по другим законам, которые отличаются от законов
формирования
фотографического
(перспективного)
изображения
6.
Фотоснимки по своим геометрическим свойствам такжемогут отличаться друг от друга (бывают фотоснимки
центральной проекции, панорамные фотоснимки, щелевые
фотоснимки)
При этом употребление термина «фотоснимок», если не
уточняется, какой он проекции, означает, что его свойства
являются общими для всех видов фотоизображений,
независимо от того, чем они получены: АФА, космическим
фотоаппаратом или фототеодолитом. Следовательно, все
виды таких фотоснимков объединяет то, что их изображение
является центральной проекцией
Напомним, что изображение, полученное центральным
проектированием, называется перспективой. Перспектива на
плоскости называется линейной перспективой. Таким
образом, любой фотоснимок центральной проекции, является
линейной перспективой
7.
Фотограмметрическаяобработка
фотоснимков
предполагает
определение
координат точек местности и фотоснимков.
Применяемые при этом системы координат (СК)
зависят от решаемых задач
Следует иметь в виду, что в фотограмметрии
положение точек, как на местности, так и на фотоснимках
принято определять прямолинейными прямоугольными
координатами. В дальнейшем будем слово «прямолинейные»
опускать
8. Координаты точек местности и фотоснимка
Системы координат (СК) точек местностиТопографические карты
создаются в
проекции Гаусса и при этом используется
плоская прямоугольная система координат.
Высоты точек при этом измеряют в
Балтийской системе высот, началом которой
является нульпункт Кронштадского футштока.
В фотограмметрии плоские
прямоугольные координаты точек местности
и их
высоты объединяют в одну систему.
Называют такую СК (ОГХГYГZГ) геодезической.
Началом (ОГ) этой системы координат
является точка пересечения экватора и
осевого меридиана зоны, а ось ZГ направлена
перпендикулярно к плоскости ХГYГ таким
образом, чтобы система координат была
левой.
СК точек местности
x
Осевой
меридиан
y
Экватор
Плоская СК зоны
в проекции Гаусса
Zг
Хг
Yг
Ог
Геодезическая СК
А (Хг,Yг, Zг)
(x, y, H)
Zг
Хг
Yг
9.
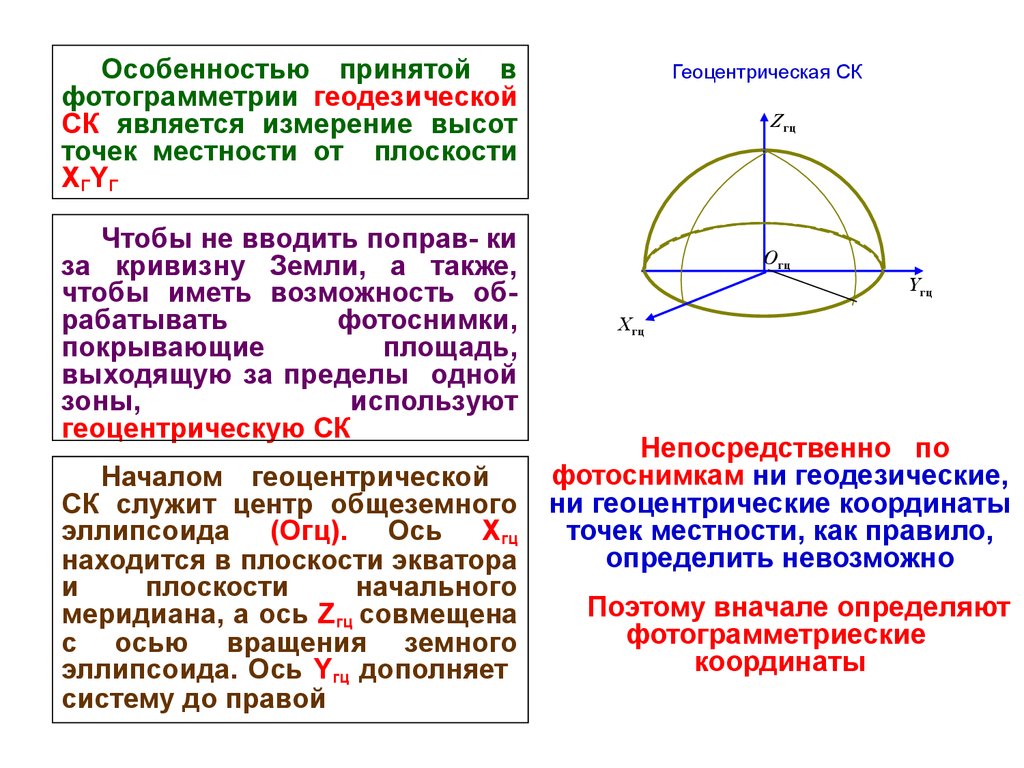
Особенностью принятой вфотограмметрии геодезической
СК является измерение высот
точек местности от плоскости
ХГYГ
Чтобы не вводить поправ- ки
за кривизну Земли, а также,
чтобы иметь возможность обрабатывать
фотоснимки,
покрывающие
площадь,
выходящую за пределы одной
зоны,
используют
геоцентрическую СК
Началом геоцентрической
СК служит центр общеземного
эллипсоида (Огц). Ось Xгц
находится в плоскости экватора
и
плоскости
начального
меридиана, а ось Zгц совмещена
с осью вращения земного
эллипсоида. Ось Yгц дополняет
систему до правой
Геоцентрическая СК
Zгц
Oгц
Yгц
Xгц
Непосредственно по
фотоснимкам ни геодезические,
ни геоцентрические координаты
точек местности, как правило,
определить невозможно
Поэтому вначале определяют
фотограмметриеские
координаты
10.
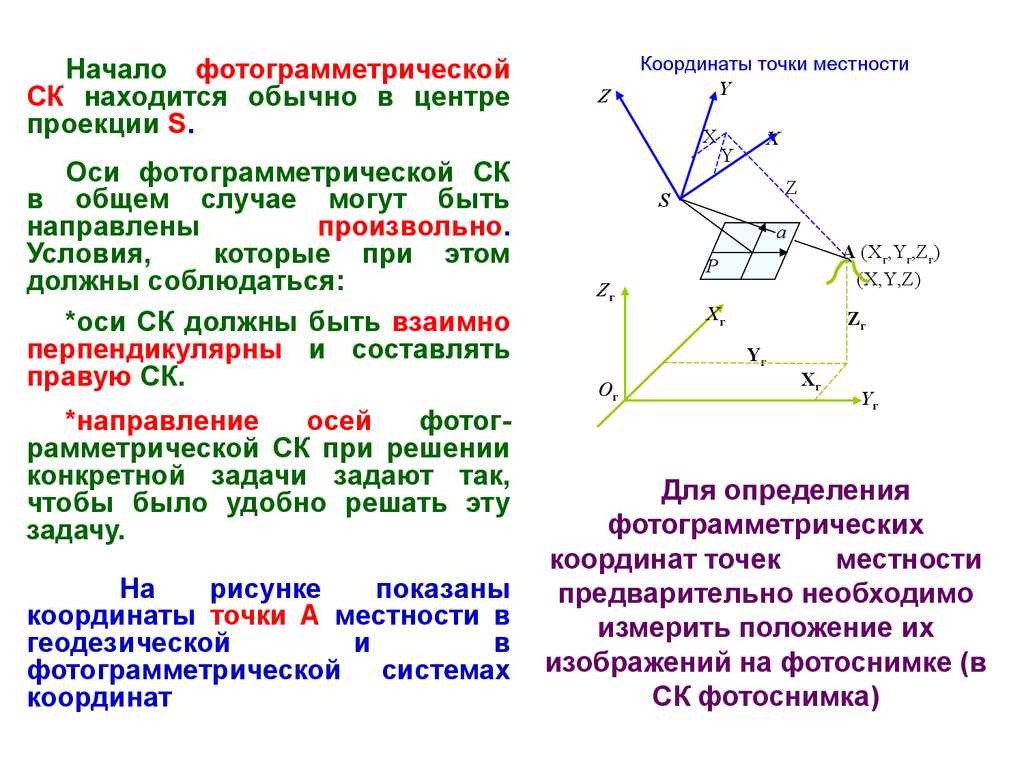
Начало фотограмметрическойСК находится обычно в центре
проекции S.
Оси фотограмметрической СК
в общем случае могут быть
направлены
произвольно.
Условия,
которые при этом
должны соблюдаться:
*оси СК должны быть взаимно
перпендикулярны и составлять
правую СК.
*направление
осей
фотограмметрической СК при решении
конкретной задачи задают так,
чтобы было удобно решать эту
задачу.
На
рисунке
показаны
координаты точки А местности в
геодезической
и
в
фотограмметрической системах
координат
Z
Координаты точки местности
Y
Х
X
Y
Z
S
а
А (Хг,Yг,Zг)
(Х,Y,Z)
Р
Zг
Xг
Zг
Yг
Ог
Хг
Yг
Для определения
фотограмметрических
координат точек
местности
предварительно необходимо
измерить положение их
изображений на фотоснимке (в
СК фотоснимка)
11.
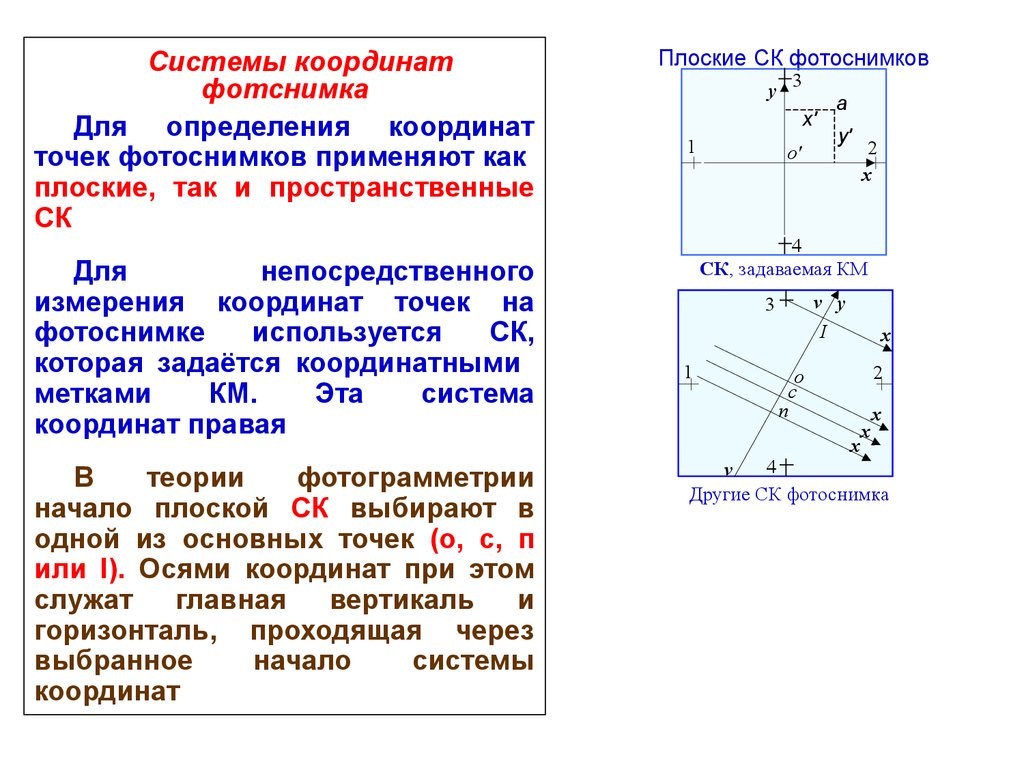
Системы координатфотснимка
Для определения координат
точек фотоснимков применяют как
плоские, так и пространственные
СК
Для
непосредственного
измерения координат точек на
фотоснимке
используется
СК,
которая задаётся координатными
метками
КМ.
Эта
система
координат правая
В
теории
фотограмметрии
начало плоской СК выбирают в
одной из основных точек (о, с, п
или I). Осями координат при этом
служат
главная
вертикаль
и
горизонталь, проходящая через
выбранное
начало
системы
координат
Плоские СК фотоснимков
y
3
х'
1
o'
а
у'
2
x
4
СК, задаваемая КМ
v y
I
3
1
x
2
o
c
n
x
x
x
4
v
Другие СК фотоснимка
12.
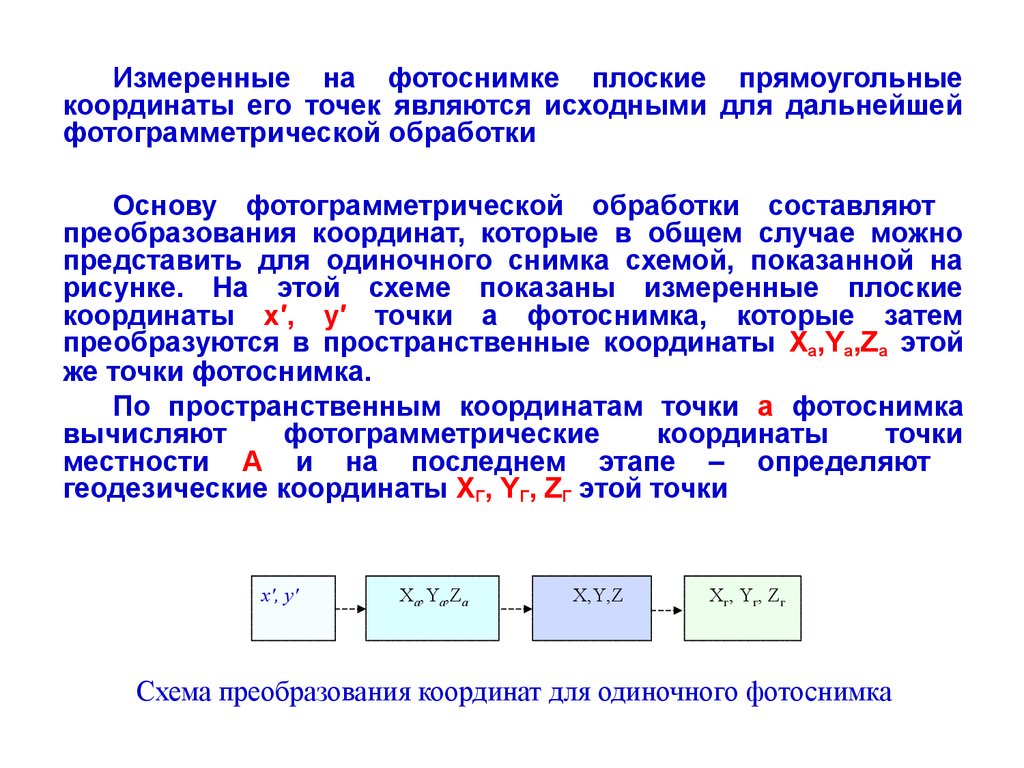
Измеренные на фотоснимке плоские прямоугольныекоординаты его точек являются исходными для дальнейшей
фотограмметрической обработки
Основу фотограмметрической обработки составляют
преобразования координат, которые в общем случае можно
представить для одиночного снимка схемой, показанной на
рисунке. На этой схеме показаны измеренные плоские
координаты x′, y′ точки а фотоснимка, которые затем
преобразуются в пространственные координаты Xа,Yа,Zа этой
же точки фотоснимка.
По пространственным координатам точки а фотоснимка
вычисляют
фотограмметрические
координаты
точки
местности А и на последнем этапе – определяют
геодезические координаты XГ, YГ, ZГ этой точки
x′, y′
Xа,Yа,Zа
X,Y,Z
Xг, Yг, Zг
Схема преобразования координат для одиночного фотоснимка
13.
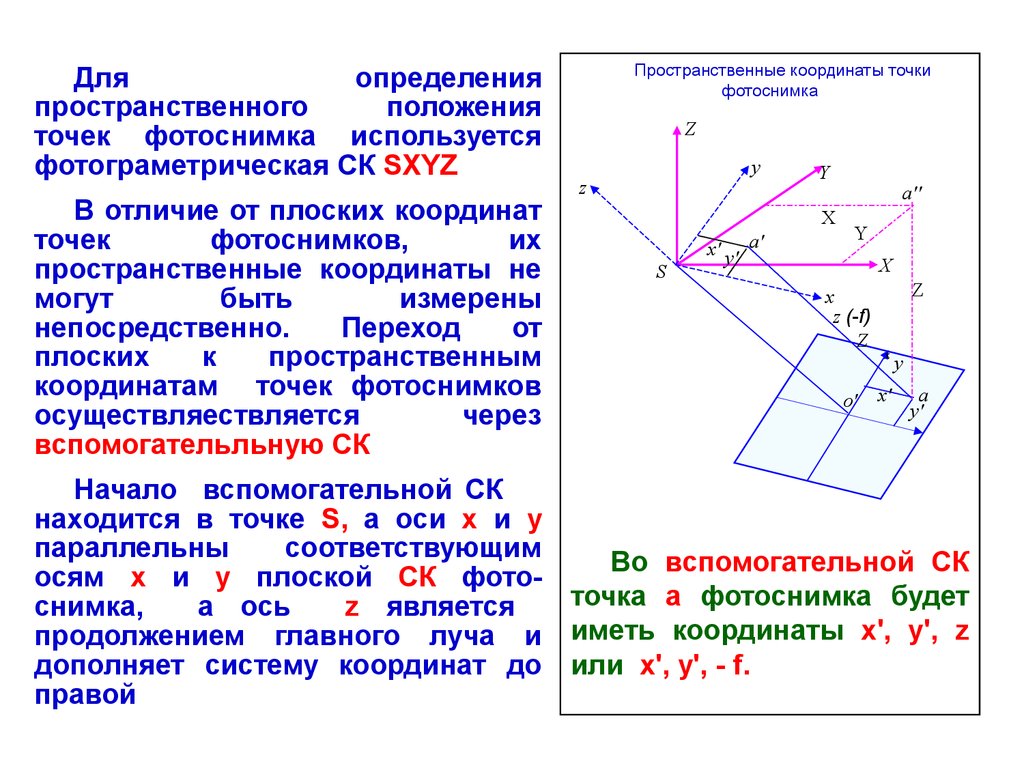
Дляопределения
пространственного
положения
точек фотоснимка используется
фотограметрическая СК SXYZ
В отличие от плоских координат
точек
фотоснимков,
их
пространственные координаты не
могут
быть
измерены
непосредственно.
Переход
от
плоских
к
пространственным
координатам точек фотоснимков
осуществляествляется
через
вспомогательльную СК
Пространственные координаты точки
фотоснимка
Z
y
z
Y
X
S
x′ y′ a′
a′′
Y
X
x
z (-f)
Z
o'
Z
x
x′
y
a
y′
Начало вспомогательной СК
находится в точке S, а оси х и у
параллельны
соответствующим
Во вспомогательной СК
осям х и у плоской СК фототочка а фотоснимка будет
снимка,
а ось
z является
продолжением главного луча и иметь координаты х', у', z
дополняет систему координат до или х', у', - f.
правой
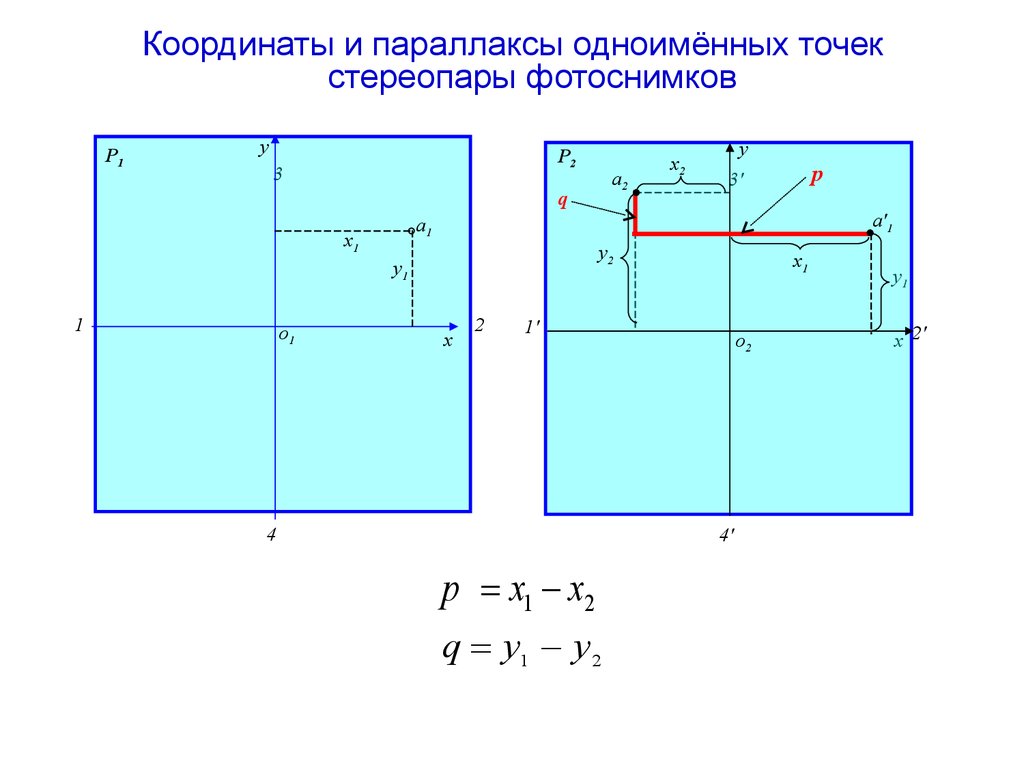
14. Координаты и параллаксы одноименных точек стереопары
На левом фотоснимке положениеточки а1 определяется координатами
х1,у1, на правом положение точки а2 –
координатами х2,у2.
Очевидно, что в общем случае
координаты одноименных точек не
равны, то есть х1 ≠ х2 и у1 ≠ у2.
Следовательно, на фотоснимках
стереопары существуют смещения
одноименных точек. Эти смещения
называют
параллаксами
(от
греческого слова parallaxis)
Смещение одноименных точек
параллельно
оси
абсцисс
называется
продольным
параллаксом, обозначим его буквой
р. Продольные параллаксы вызваны
перемещением центров проекций (из
точки S1 в точку S2)
Координаты и параллаксы одноимённых
точек стереопары фотоснимков
3
y
o1
1
3′
x1
а1
q
a2
y1
2 1′
x
y2 x2
y
p
o2
x1
a′1
y1
x 2′
Р2
Р1
4
4′
Смещение
одноименных
точек параллельно оси ординат
называется
поперечным
параллаксом - q. Он вызывается
взаимными углами наклона
2го фотоснимка и составляющими
базиса вдоль оси оринат и
аппликат.
15.
Координаты и параллаксы одноимённых точекстереопары фотоснимков
Р1
y
Р2
3
a2
q
p
3′
a′1
y2
y1
o1
y
а1
x1
1
x2
x
2
x1
1′
4
o2
4′
p x1 x2
q y1 y 2
y1
x 2′
16.
Для практического использования координатыточек местности должны быть определены в
геодезической
СК.
Решать
эту
задачу
непосредственно
по
фотоснимкам
не
представляется
возможным.
Поэтому
по
фотоснимкам
получают
положение
точек
местности
(модели)
относительно
фотограмметрической СК, а затем переходят к
геодезическим координатам. С этой целью по
фотоснимкам измеряют плоские координаты точек
фотоснимков, затем преобразовывают их в
пространственные координаты этих же точек, а
потом по ним определяют положение точек на
модели, то есть фотограмметрические координаты
точек местности
17. Элементы ориентирования фотоснимка
Положение фотоснимка вмомент
фотографирования
определяется его элементами
ориентирования (ЭО)
Различают
элементы
внутреннего
ориентирования
(ЭВнО) и элементы внешнего
ориентирования
(ЭВО)
фотоснимков
ЭВнО
фотоснимка
определяют положение центра
проекции
относительно
плоскости фотоснимка. К ним
относятся координаты хо,уо
главной точки и его фокусное
расстояние f
ЭВнО фотоснимка
S.
f
y
хо o
уо
o′
x
P
ЭВнО
позволяют
восстановить
связку
проектирующих
лучей.
Она
может
быть
подобной
и
преобразованной (изменяется
фокусное расстояние f)
18. ЭВО фотоснимка опреляют положение связки проектирующих лучей в момент фотографирования (определяют положение фотоснимка и его центра про
ЭВО фотоснимка опреляют положение связкипроектирующих лучей в момент
фотографирования (определяют положение
фотоснимка и его центра проекции) в
выбранной СК
19.
20. Цифровой фотоснимок и его атрибуты
Дискретизацию сигнала (фотоснимка)ΔD
l
можно интерпретировать как его разделение на элементарные участки пикселы. В пределах пиксела значение
Элементарный участок
оптической плотности всех точек фотоснимка – пиксел
принимается одинаковым.
Чёрно-белый фотоснимок
00010 00010
00001
00001
00001
«Пиксел» (pixel – сокращение от английских
слов «picture element»). Атрибутами пиксела
являются его плотность ΔD и размер (длина
стороны l).
Цифровой снимок – матрица,
элементами которой являются коды оптических
плотностей пикселов, т. е. D = [M×N].
...
...
00010
00010
0100
Графическая интерпретация
цифрового снимка
Атрибутами цифрового снимка являются:
• оптическая плотность каждого пиксела (задаётся в
явной форме);
• координаты пиксела (задаются неявно – номерами
строк и столбцов матрицы цифрового снимка);
• размер пиксела;
• количество разрядов кодирования (глубина цвета);
• формат и размер файла.
21. Фотограмметрические сканеры
Фотограмметрические сканеры выпускаются многими фирмами(Лейка, К.Цейсс, Интерграф и др.)
Фотограмметрический сканер
DSW-500 (LH Systems)
Фотограмметрический сканер
ДС-470-А. (Геосистема, Украина)
22.
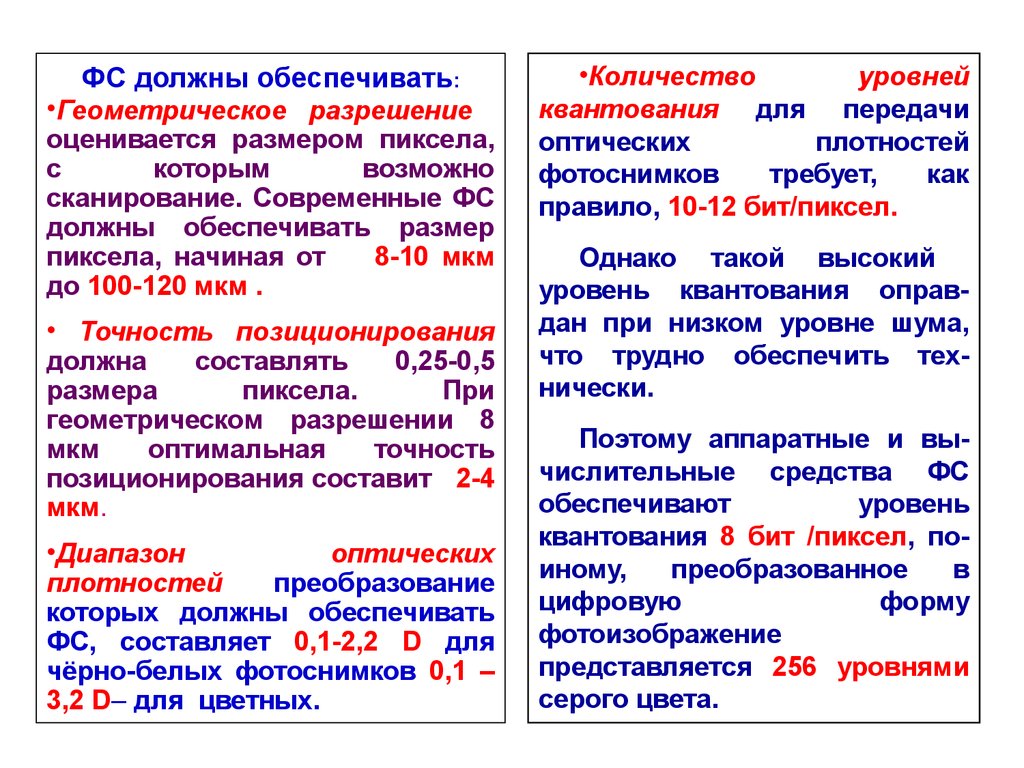
ФС должны обеспечивать:•Геометрическое разрешение
оценивается размером пиксела,
с
которым
возможно
сканирование. Современные ФС
должны обеспечивать размер
пиксела, начиная от
8-10 мкм
до 100-120 мкм .
• Точность позиционирования
должна
составлять
0,25-0,5
размера
пиксела.
При
геометрическом разрешении 8
мкм
оптимальная
точность
позиционирования составит 2-4
мкм.
•Диапазон
оптических
плотностей
преобразование
которых должны обеспечивать
ФС, составляет 0,1-2,2 D для
чёрно-белых фотоснимков 0,1 –
3,2 D– для цветных.
•Количество
уровней
квантования для передачи
оптических
плотностей
фотоснимков
требует,
как
правило, 10-12 бит/пиксел.
Однако такой высокий
уровень квантования оправдан при низком уровне шума,
что трудно обеспечить технически.
Поэтому аппаратные и вычислительные средства ФС
обеспечивают
уровень
квантования 8 бит /пиксел, поиному,
преобразованное
в
цифровую
форму
фотоизображение
представляется 256 уровнями
серого цвета.
23. Измерение цифровых снимков
Цифровыеизображения
снимков
хранятся
в
памяти
компьютера в виде прямоугольных
матриц.
Элементами матрицы, которая
которая имеет М строк и N
столбцов, являются оптические
плотности пикселов. Нумерация
строк
и
столбцов
матрицы
цифрового снимка начинается с 0.
Для измерения цифрового
снимка используется левая система
пиксельных
координат
охцуц,
начало которой находится в левом
верхнем углу цифрового снимка
Цифровой снимок
0
0
1
2
3
j
N-1
N
xц
d22
dij
i
M-1
M
j
Y
При
измерениях
используются
маркикурсоры. Они образуются из
пикселов цифрового снимка
ц
24. Цифровой фотоплан
Цифровой фотоплан – этоцифроровое
трансформированное
изображежение
созданное
по
перекрывающимся
исходным
фотоснимкам.
Цифровой фотоплан может
создаваться двумя методами:
из
трансформированных
изображений, созданных по каждому из
цифровых
перекрывающихся
фотоснимков;
у
Сущность создания цифрового
фотоплана (ЦФП) по первому методу
можно
проследить
на
рисунке.
Трансформированные снимки должны
иметь одинаковый размер пикселов.
Кроме того, координаты начал о1 и о2
координатных систем этих снимков
должны
быть
кратные
размеру
пиксела.
Снимок - 2
о2
К2
о1
К3
К4
К5
К6
• путём формирования фотоплана непосредственно в процессе трансформирования всех прекрывающихся фотоснимков.
К1
Цифровой фотоплан
К7
Снимок - 1
К8
Граничные
пикселы
х
Схема формирования цифрового
фотоплана
В зоне перекрытия снимков проводят линию пореза в виде полигональной линии с узлами Кi.
В каждой строке определяют
граничные пикселы, совмещённые с
линией пореза, а затем приступают к
формированию матрицы ЦФП .
25. Сущность, назначение и классификация фотограмметрических сетей и способов их построения
Фототриангуляция – это метод определения плановогоположения и высот точек местности по перекрывающимся
фотоснимкам
Основное назначение фототриангуляции – сгущение опорной
геодезической
сети
по
фотоснимкам.
Фототриангуляция
подразделяется на два вида:
плоскостную
пространственную
В плоскостной фототриангуляции определяют только плановые
координаты, в пространственной, кроме плановых координат,
определяют также и высоты точек местности
Пространственная фототриангуляция – это метод определения
постранственного положения точек местности по перекрывающимся
фотоснимкам, в основе которого лежит построение системы
треуольников
Наряду с термином «сеть фототриангуляции» используется другое
название этого понятия – «фотограмметрическая сеть»
26.
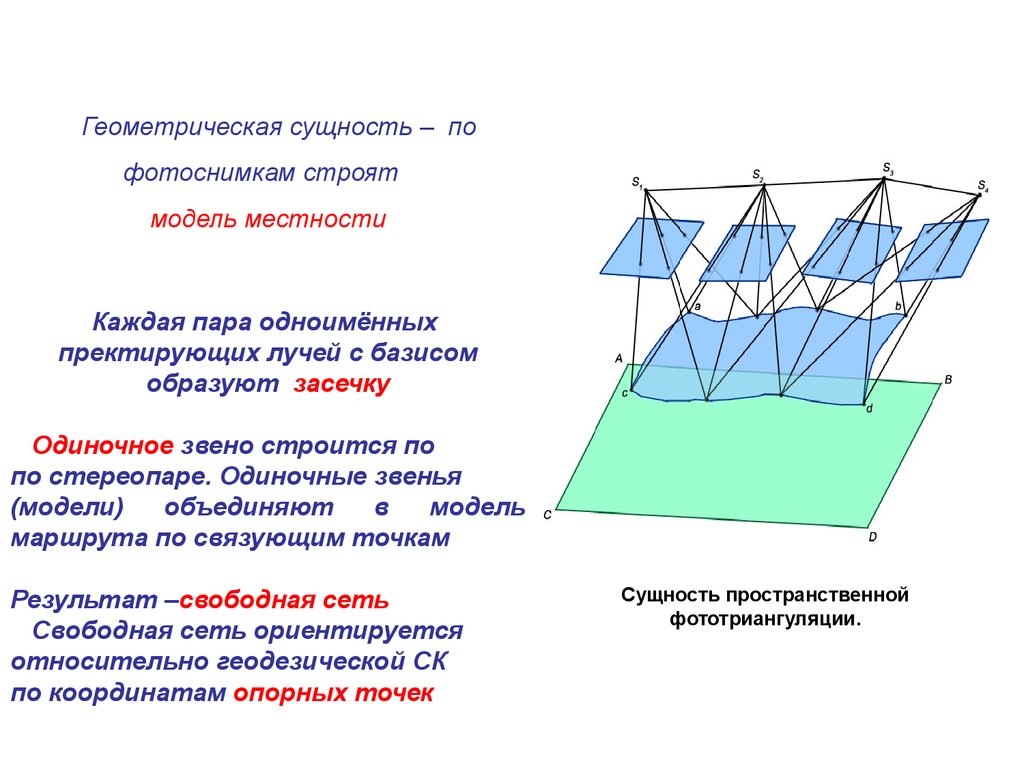
Геометрическая сущность – пофотоснимкам строят
модель местности
Каждая пара одноимённых
пректирующих лучей с базисом
образуют засечку
Одиночное звено строится по
по стереопаре. Одиночные звенья
(модели)
объединяют
в
модель
маршрута по связующим точкам
Результат –свободная сеть
Свободная сеть ориентируется
относительно геодезической СК
по координатам опорных точек
Сущность пространственной
фототриангуляции.
27.
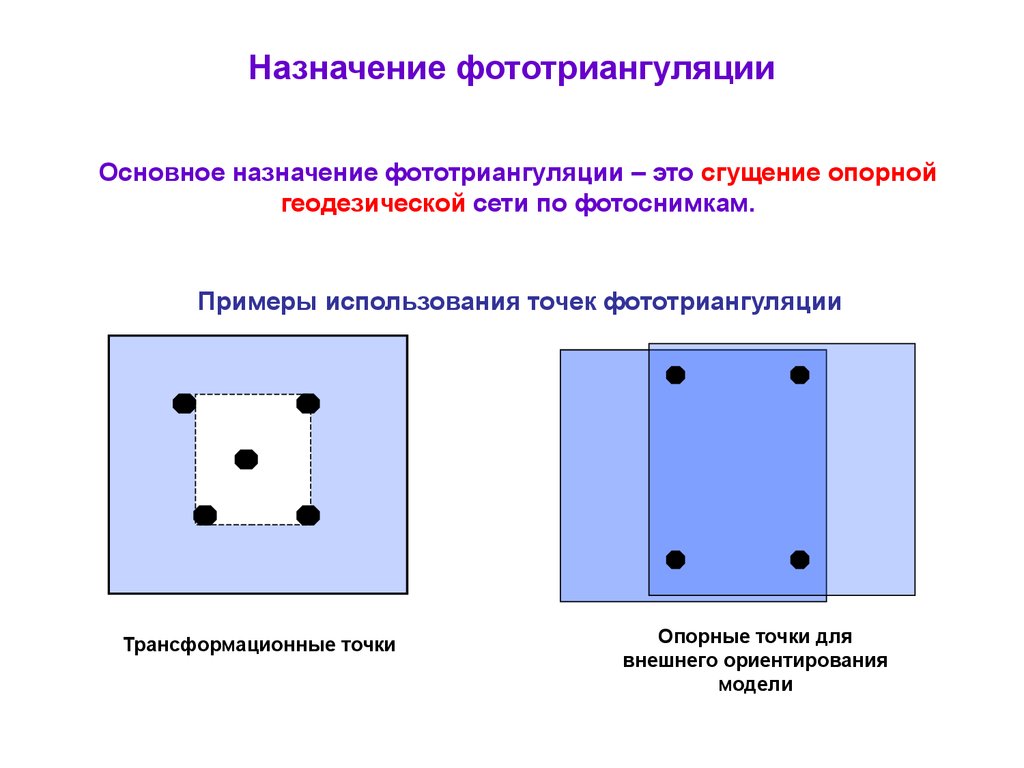
Назначение фототриангуляцииОсновное назначение фототриангуляции – это сгущение опорной
геодезической сети по фотоснимкам.
Примеры использования точек фототриангуляции
Трансформационные точки
Опорные точки для
внешнего ориентирования
модели
28.
При обновлении топографических и других видовкарт точки фотограмметрических сетей
используют:
для проверки их точности;
для трансформирования фотоснимков;
для переноса изменений на оригиналы карт.
Результаты
построения
фотограмметрических
используют при определении координат целей
Кроме того, фототриангуляцию применяют и для решения
многих нетопографических задач.
сетей
29. Классификация фотограмметрических сетей
Маршрутная фотограмметрическая сетьВариант обеспечения блочной сети опорными
точками:
– планово-высотные точки
–высотные точки
Каркасная и заполняющая
фотограмметрические сети
30.
определяют ЭВзО стереопары фотоснимковстроят модель местности
определяют по опорным точкам ЭВО модели (выполняют
внешнее ориентирование модели);
определяют геодезические координаты точек местности
31.
Фототриангуляция, как метод позволяет определять пофотоснимкам координаты точек местности. Поэтому она
используется для сгущения геодезической основы – создания
сети опорных точек (планово-высотной основы) карт и
фотодокументов.
Фототриангуляция
выполняется
в
камеральных условиях. Тем самым сокращаются затраты
времени на трудоёмкие и дорогостоящие полевые работы. Что
особенно важно для выполнения аэрофотогеодезических
работ на недоступные и труднодоступные территории
Различают два вида фототриангуляции: плоскостную и
пространственную.
Пространственная
фототриангуляция
(фотограмметрические сети) могут строится аналоговым или
аналитическим способом. В настоящее время используется
аналитическая фототриангуляция, теоретическую основу
которой составляют зависимости между координатами точек
местности и фотоснимков.
32.
Система цифровой фотограмметрии PHOTOMOD разработка российской компании Ракурс (г.Москва) ипредназначена для решения комплекса задач:
от
построения
и
уравнивания
сетей
фототриангуляции до создания цифровых карт,
цифровых моделей рельефа и ортофотопланов.
Система цифровой фотограмметрии PHOTOMOD
включает средства обработки аэрофотоснимков
наземных снимков и сканерных изображений
33.
Система цифровой фотограмметрииPHOTOMOD имеет модульную структуру и
включает модули:
«PHOTOMOD АТ» (Aerial triangulation), предназначенный для построения
маршрутных и блочных сетей пространственной фототриангуляции;
«PHOTOMOD Solver» выполняет уравнивание блока фототриангуляции
после сбора всех необходимых исходных данных. В результате
оказываются известными элементы внешнего ориентирования снимков,
которые используются в двух последующих модулях.
«PHOTOMOD
StereoDraw»
необходимый
для
создания
и
редактирования трехмерных векторных объектов (стереовекторизация).
«PHOTOMOD StereoVectOr» служит для параллельной работы с картой
формата «PHOTOMODVectOr в окнах «StereoDraw» (3D векторизация) и
«VectOr» (векторизация по ортофото и редактирование карт).
«PHOTOMOD DTM» обеспечивает создание цифровых моделей рельефа
(ЦМР), проведение горизонталей и их редактирование в стереорежиме.
«ScanCorrect» позволяет исправить геометрические искажения, вносимые
при сканировании снимков на планшетном полиграфическом сканере.
«PHOTOMOD Mosaik» служит для построения ортофотоплана
34.
Процесс составления плана или карты поцифровым снимкам состоит из 4 этапов:
формирование (цель этапа - сформировать блок снимков для
фототриангуляции);
измерение
(этап
необходим
для
построения
свободно
ориентированной модели);
уравнивание (внешнее ориентирование модели и вычисление
элементов ориентирования каждой стереопары);
обработка (используется для измерения снимков в моно или
стереорежиме при составлении плана или карты местности).
Стереоскопическая визуализация в системе осуществляется
анаглифическим методом или с помощью затворных очков.
Запускаются модули (для существующего или вновь создаваемого
проекта) из модуля «PHOTOMOD Montage Desktop».
35. Файл камеры
;PhINI3.5
[Camera]
Name="RC 20"
Type=4
Units=2
Focal=1.5340600000000001e+02
X0=-5.0000000000000001e-03
Y0=5.0000000000000001e-03
DistortionType=0
;PhINIend
36. каталог опорных точек v101 4970650.488 6444325.082 129.885 v102 4970155.633 6444294.034 127.164 v103 4970624.541 6443957.396 129.786 v104 4970226.294 6443947.075 129.643 v105 4970703.935 6443585.227 133.846 v106 4970296.416 6443635.036
каталогv101
v102
v103
v104
v105
v106
опорных
4970650.488
4970155.633
4970624.541
4970226.294
4970703.935
4970296.416
6444325.082
6444294.034
6443957.396
6443947.075
6443585.227
6443635.036
точек
129.885
127.164
129.786
129.643
133.846
135.225
37. Основные этапы обработки и анализа данных дистанционного зондирования Земли:
•Импорти
Отображение
–
представление
данных
(изображений), полученных непосредственно из их источника, в
удобном для пользователя наглядном виде без потерь и искажений;
•Радиометрическая коррекция и Улучшение – изменение
параметров изображения (яркость, контрастность, цветовой баланс,
фильтрация помех и т.д.), направленное на улучшение его читаемости
и облегчение дальнейшего анализа;
•Геометрическая коррекция:
Географическая привязка – идентификация участка земной
поверхности, отображённого на изображении, и присвоение каждой
точке изображения координат в соответствии с координатами данных
точек на местности;
Геометрическое
трансформирование
–
приведение
изображения к заданному масштабу и картографической проекции с
устранением смещений из-за выполнения съёмки с отклонением от
надира, рельефа местности, кривизны поверхности Земли и
геометрических искажений;
38. Основные этапы обработки и анализа данных дистанционного зондирования Земли:
•Тематическая обработкаКлассификация – распознавание на изображении участков,
соответствующих различным категориям объектов, и построение на
этой основе нового (тематического) изображения, на котором
объекты, принадлежащие к одной категории, отображаются
одинаково (одним цветом);
ГИС-анализ – анализ взаимного пространственного положения
различных объектов на изображениях и атрибутивной (описательной)
информации о них, производимой с целью решения разнообразных
прикладных задач;
Подготовка отчёта – создание качественных отчётных
информационных материалов, содержащих результаты обработки и
анализа данных и сопровождающихся необходимыми иллюстрациями,
пояснениями и т.д.;
39.
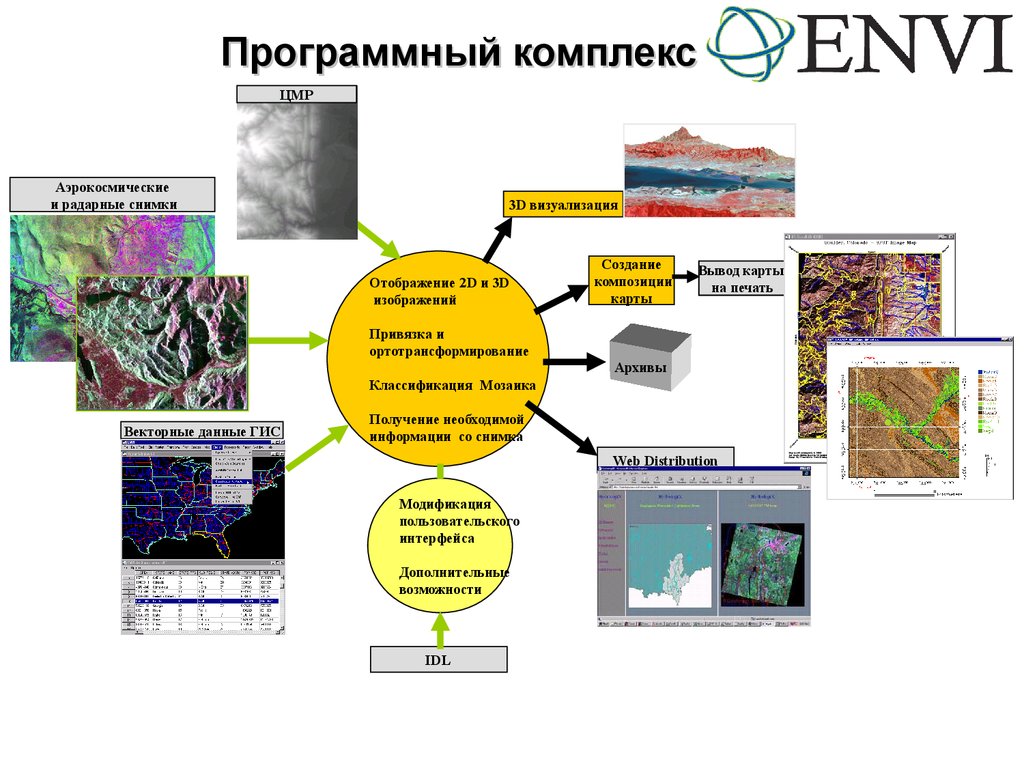
40.
Программный комплексЦМР
Аэрокосмические
и радарные снимки
3D визуализация
Отображение 2D и 3D
изображений
Создание
композиции
карты
Вывод карты
на печать
Привязка и
ортотрансформирование
Архивы
Классификация Мозаика
Векторные данные ГИС
Получение необходимой
информации со снимка
Web Distribution
Модификация
пользовательского
интерфейса
Дополнительные
возможности
IDL
41.
Программный комплексВекторный файл,
полученный при анализе
панхроматического снимка
с КА QuickBird
Пример выделения классов
при объектно-ориентированной
обработке данных
42. ДЕШИФРИРОВАНИЕ И ПЕРЕНОС РЕЗУЛЬТАТОВ ДЕШИФРИРОВАНИЯ НА КАРТОГРАФИЧЕСКУЮ ОСНОВУ СОЗДАНИЕ ОРИГИНАЛА СОСТАВЛЕНИЯ, ОРИГИНАЛА ОБНОВЛЕНИЯ
Изготовление оригиналов контуров выполняется, как правило, на участкиместности, на которые топографические карты данного масштаба создаются
впервые,
или
невозможно
выполнить
обновление
имеющихся
топографических карт (объем изменений местности и точность не
соответствует требованиям.
Создание оригиналов составления включает:
•Дешифрирование фотоснимков;
•Перенос результатов дешифрирования на картографическую основу;
•Определение числовых характеристик объектов местности.
43. ДЕШИФРИРОВАНИЕ И ПЕРЕНОС РЕЗУЛЬТАТОВ ДЕШИФРИРОВАНИЯ НА КАРТОГРАФИЧЕСКУЮ ОСНОВУ СОЗДАНИЕ ОРИГИНАЛА СОСТАВЛЕНИЯ, ОРИГИНАЛА ОБНОВЛЕНИЯ
Основой камерального дешифрирования фотоснимков является комплексноеиспользование прямых и косвенных дешифровочных признаков объектов
местности.
К прямым дешифровочным признакам относятся
форма, размеры, тон
изображения и тень объектов. К косвенным дешифровочным признакам - заранее
выявленные закономерности расположения и взаимной связи объектов. Прямые и
косвенные дешифровочные признаки изображаемых на карте объектов местности
выявляются на основе тщательного изучения эталонов дешифрирования и
описаний к ним, а также путем сопоставления фотоснимков с имеющимися
топографическими картами.
При камеральном дешифрировании рекомендуется сначала использовать прямые
признаки, а затем косвенные. Необходимо учитывать, что дешифровочные
признаки изменяются в зависимости от времени и условий аэрофотосъемки и
географических особенностей района. На плановом фотоснимке изображение
плоского горизонтального объекта местности практически соответствует
очертаниям этого объекта на местности. Изображения объектов на краях снимка
могут значительно искажаться.
44. ДЕШИФРИРОВАНИЕ И ПЕРЕНОС РЕЗУЛЬТАТОВ ДЕШИФРИРОВАНИЯ НА КАРТОГРАФИЧЕСКУЮ ОСНОВУ СОЗДАНИЕ ОРИГИНАЛА СОСТАВЛЕНИЯ, ОРИГИНАЛА ОБНОВЛЕНИЯ
Размер является основным критерием, позволяющим отличить объектыдруг от друга, если их форма примерно одинакова. Размер изображения объекта
зависит от масштаба фотоснимков
Тон изображения объектов на аэрофотоснимках зависит от отражательной
способности объектов, освещенности местности, светочувствительности
фотопленки и ее фотолабораторной обработки, времени
суток и года
производства съемки. Поэтому на фотоснимках различные объекты могут
изобразиться одинаковым тоном и, наоборот, одинаковые объекты могут иметь
различный тон изображения. Многие объекты имеют характерный тональный
рисунок, состоящий из чередования форм различного тона, или тональную
структуру изображения. Например, зернистой структурой изображается лес,
пятнистой - бугристая тундра, полосатой - огороды и т.д.
Тени объектов имеют существенное значение для камерального
дешифрирования высоких объектов и при рассматривании форм рельефа
45. ДЕШИФРИРОВАНИЕ И ПЕРЕНОС РЕЗУЛЬТАТОВ ДЕШИФРИРОВАНИЯ НА КАРТОГРАФИЧЕСКУЮ ОСНОВУ СОЗДАНИЕ ОРИГИНАЛА СОСТАВЛЕНИЯ, ОРИГИНАЛА ОБНОВЛЕНИЯ
Косвенные дешифровочные признаки позволяют делать заключениео существовании и характере одних
объектов по наличию и
особенностям
других.
Косвенные
дешифровочные
признаки
подразделяются на признаки взаимосвязи природных элементов
местности и признаки взаимосвязи элементов местности человеческой
деятельности
Камеральное дешифрирование снимков следует начинать с участков местности, на
которые имеются эталоны или снимки полевого дешифрирования, и с участков
наиболее обеспеченных картографическими и справочными материалами или
граничащих с ранее составленными листами карты.
46. ДЕШИФРИРОВАНИЕ И ПЕРЕНОС РЕЗУЛЬТАТОВ ДЕШИФРИРОВАНИЯ НА КАРТОГРАФИЧЕСКУЮ ОСНОВУ СОЗДАНИЕ ОРИГИНАЛА СОСТАВЛЕНИЯ, ОРИГИНАЛА ОБНОВЛЕНИЯ
Камеральное дешифрирование снимков следует начинать с участков местности,на которые имеются эталоны или снимки полевого дешифрирования, и с участков
наиболее обеспеченных картографическими и справочными материалами или
граничащих с ранее составленными листами карты
Последовательность дешифрирования:
гидрография и гидротехнические сооружения;
элементы рельефа не выражающиеся горизонталями;
населенные пункты, промышленные, сельскохозяйственные и социальнокультурные объекты;
ориентиры и отдельные постройки вне населенных пунктов;
дорожная сеть и дорожные сооружения;
линии электропередачи и связи;
растительный покров и грунты.