








 Электроника
ЭлектроникаПохожие презентации:










Пуск двигателя с фазным и короткозамкнутым ротором
1. Пуск двигателя с фазным и короткозамкнутым ротором
Департамент НПО и СПОТомский Промышленно Гуманитарный Колледж
Дисциплина: Электрические машины
Тема:
Пуск двигателя с фазным и
короткозамкнутым ротором
Выполнил: Студент 541 гр.
Ткаченко Егор
Проверил: Преподаватель
Неизвестных Л.Г.
Томск 2016
2. Двигатель с короткозамкнутым ротором
3. Устройство двигателя
1 — остов;2 — статор;
3 — ротор;
4 — стержни обмотки ротора;
5 — подшипниковый щит;
6 — вентиляционные лопатки
ротора;
7 — вентилятор;
8 — коробка выводов
4.
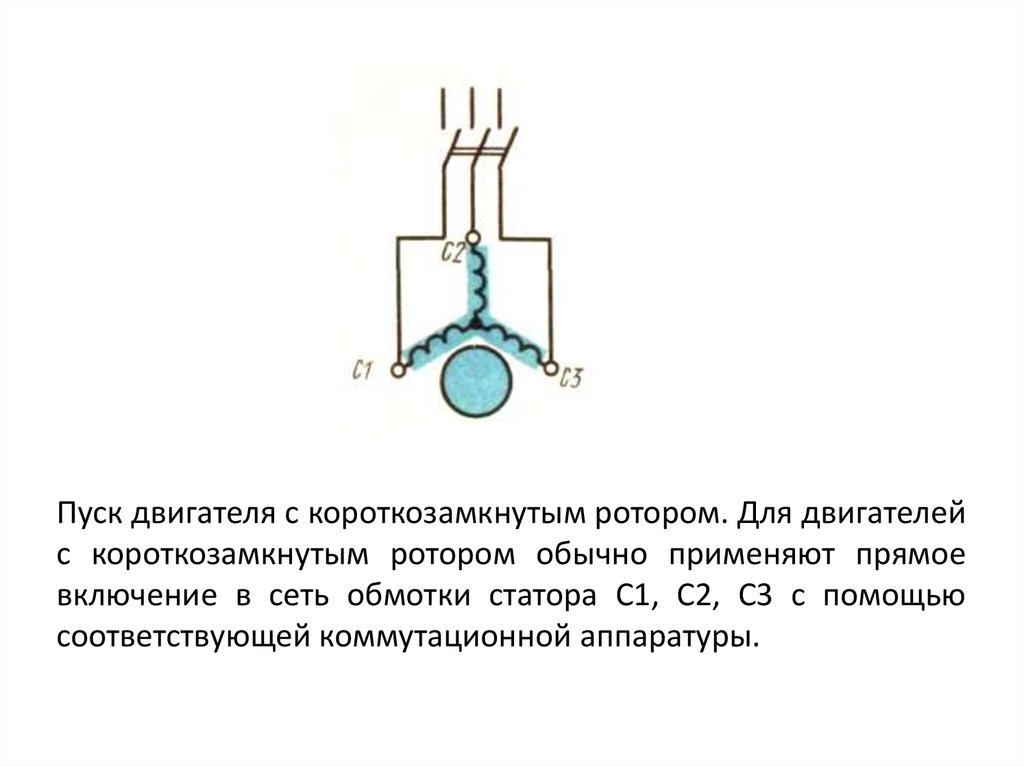
Пуск двигателя с короткозамкнутым ротором. Для двигателейс короткозамкнутым ротором обычно применяют прямое
включение в сеть обмотки статора С1, С2, С3 с помощью
соответствующей коммутационной аппаратуры.
5.
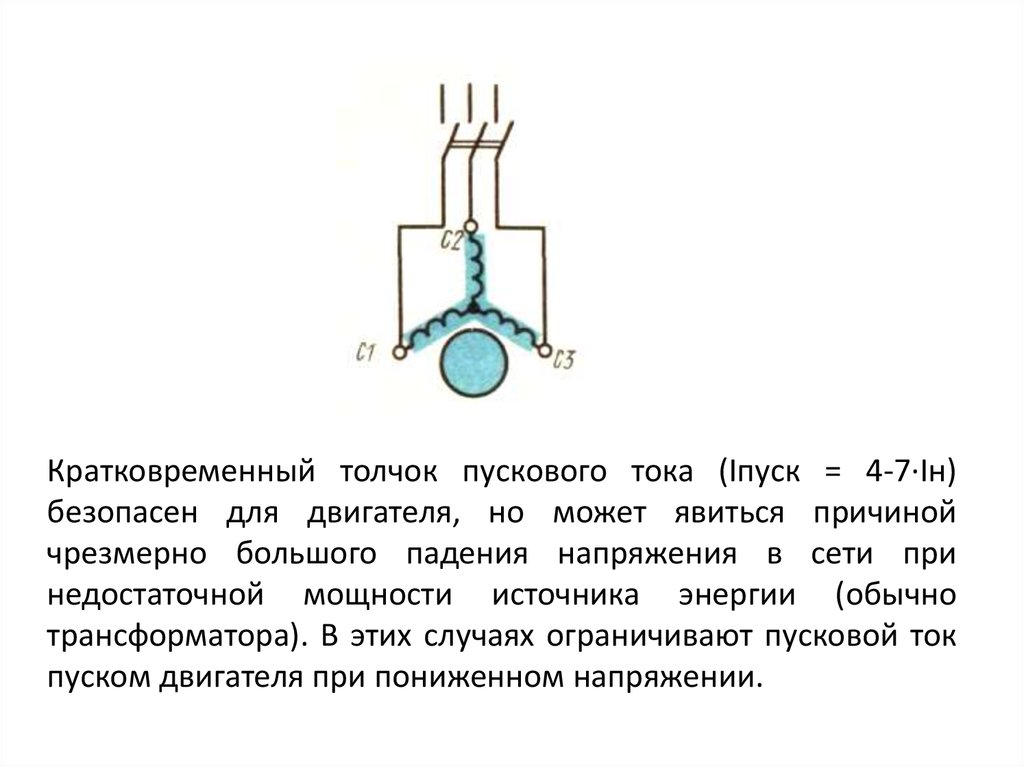
Кратковременный толчок пускового тока (Iпуск = 4-7·Iн)безопасен для двигателя, но может явиться причиной
чрезмерно большого падения напряжения в сети при
недостаточной мощности источника энергии (обычно
трансформатора). В этих случаях ограничивают пусковой ток
пуском двигателя при пониженном напряжении.
6.
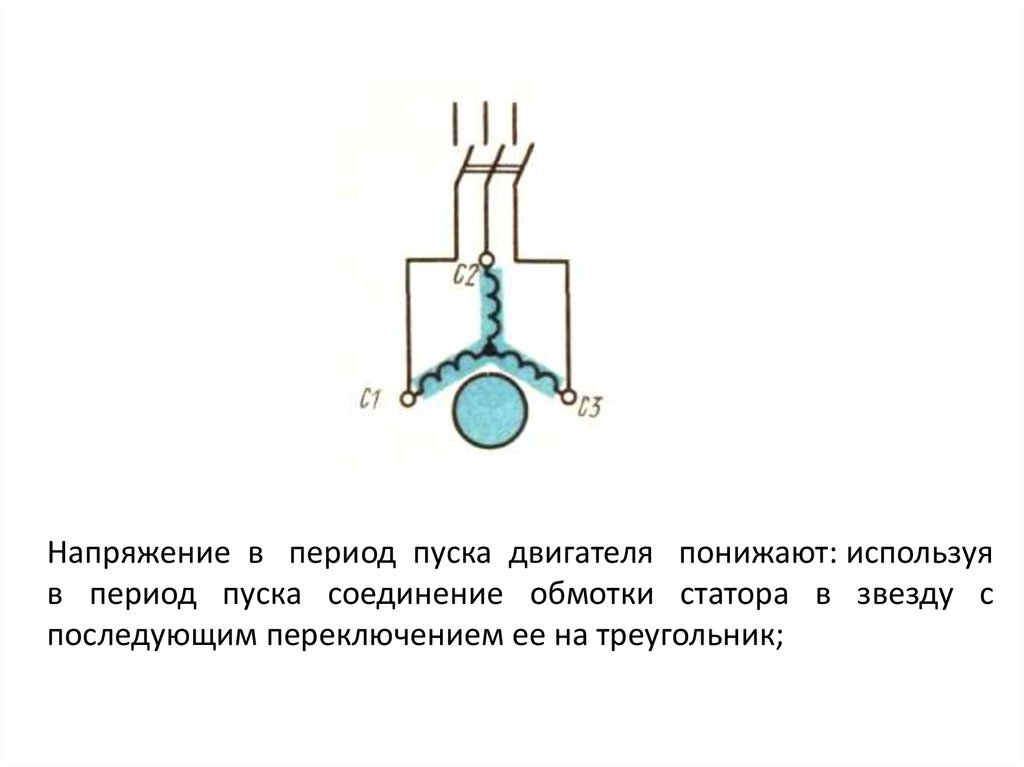
Напряжение в период пуска двигателя понижают: используяв период пуска соединение обмотки статора в звезду с
последующим переключением ее на треугольник;
7.
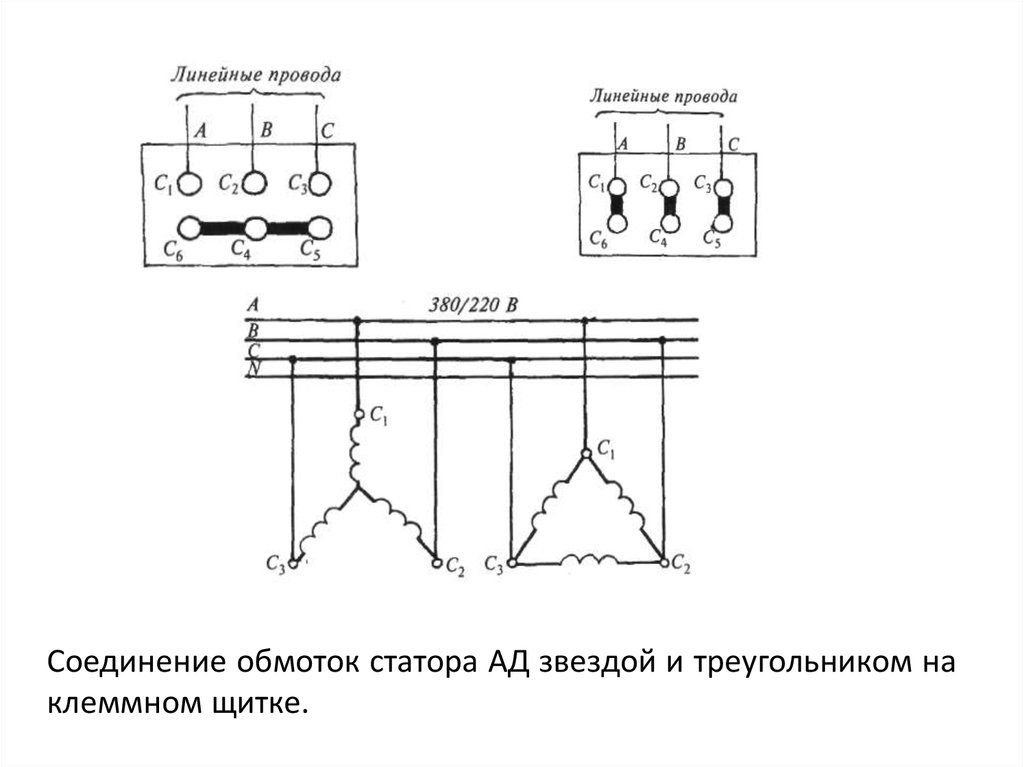
Соединение обмоток статора АД звездой и треугольником наклеммном щитке.
8.
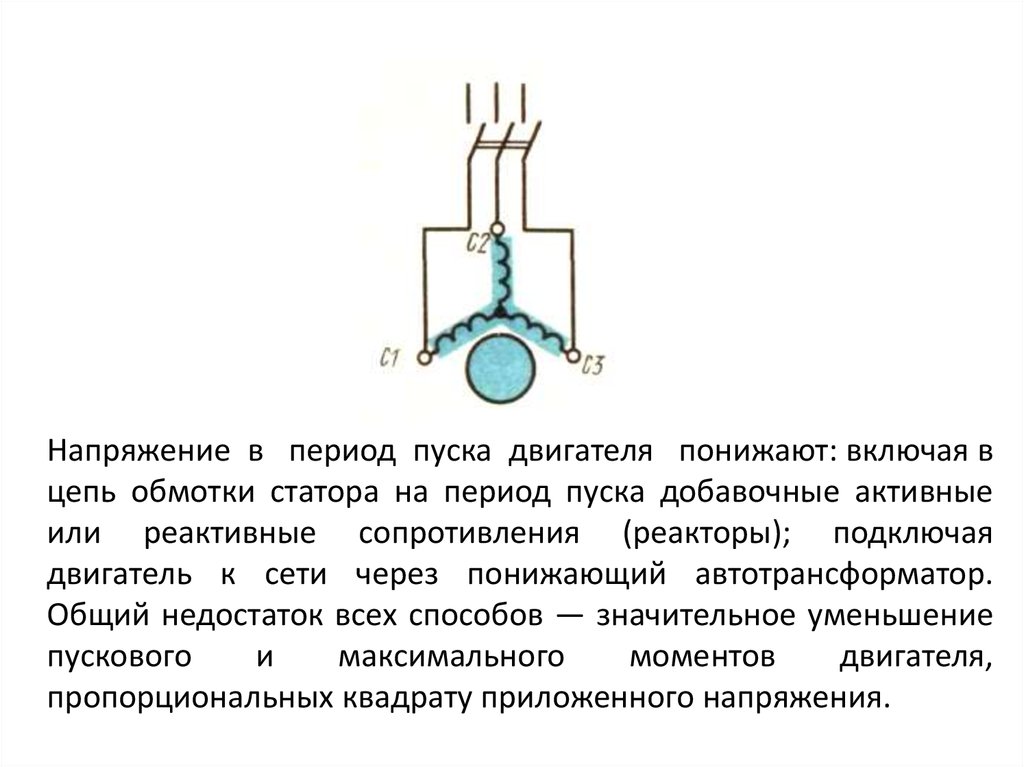
Напряжение в период пуска двигателя понижают: включая вцепь обмотки статора на период пуска добавочные активные
или реактивные сопротивления (реакторы); подключая
двигатель к сети через понижающий автотрансформатор.
Общий недостаток всех способов — значительное уменьшение
пускового
и
максимального
моментов
двигателя,
пропорциональных квадрату приложенного напряжения.
9. Двигатель с фазным ротором
10. Устройство двигателя
11.
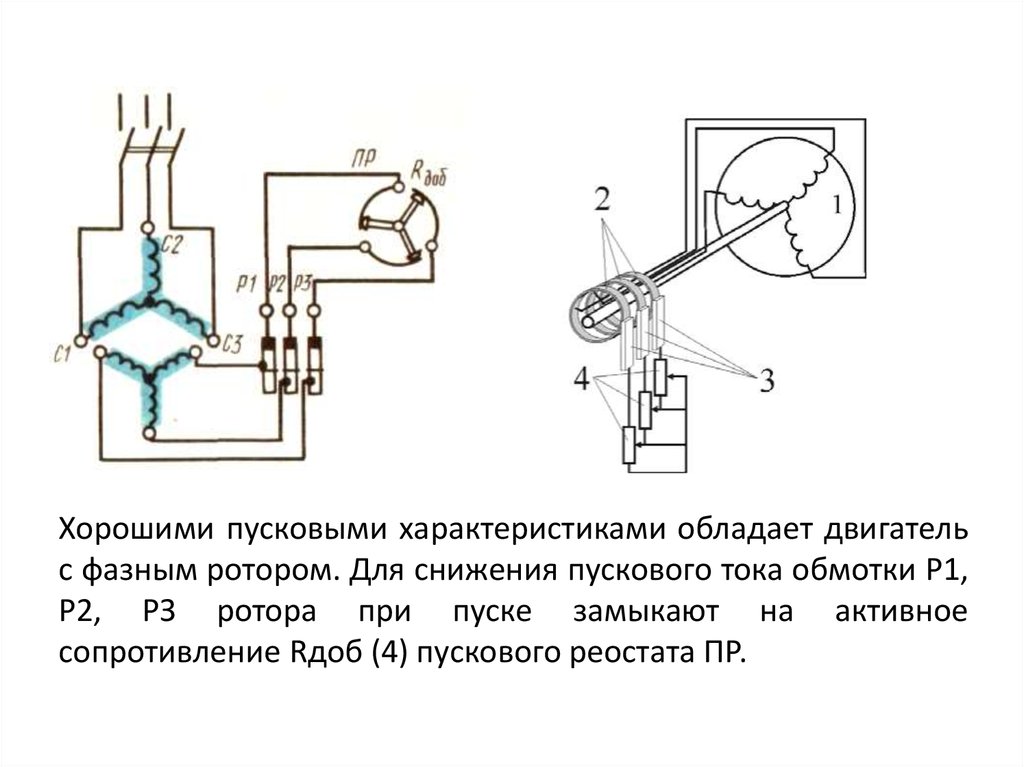
Хорошими пусковыми характеристиками обладает двигательс фазным ротором. Для снижения пускового тока обмотки Р1,
Р2, РЗ ротора при пуске замыкают на активное
сопротивление Rдoб (4) пускового реостата ПР.
12.
Частота вращения ротора асинхронного двигателяопределяется скоростью вращения магнитного поля:
Для ступенчатого изменения частоты вращения применяют
специальные двух-, трех- и четырехскоростные двигатели.
На их статоре размещают обмотки с различным числом,
полюсов.
13.
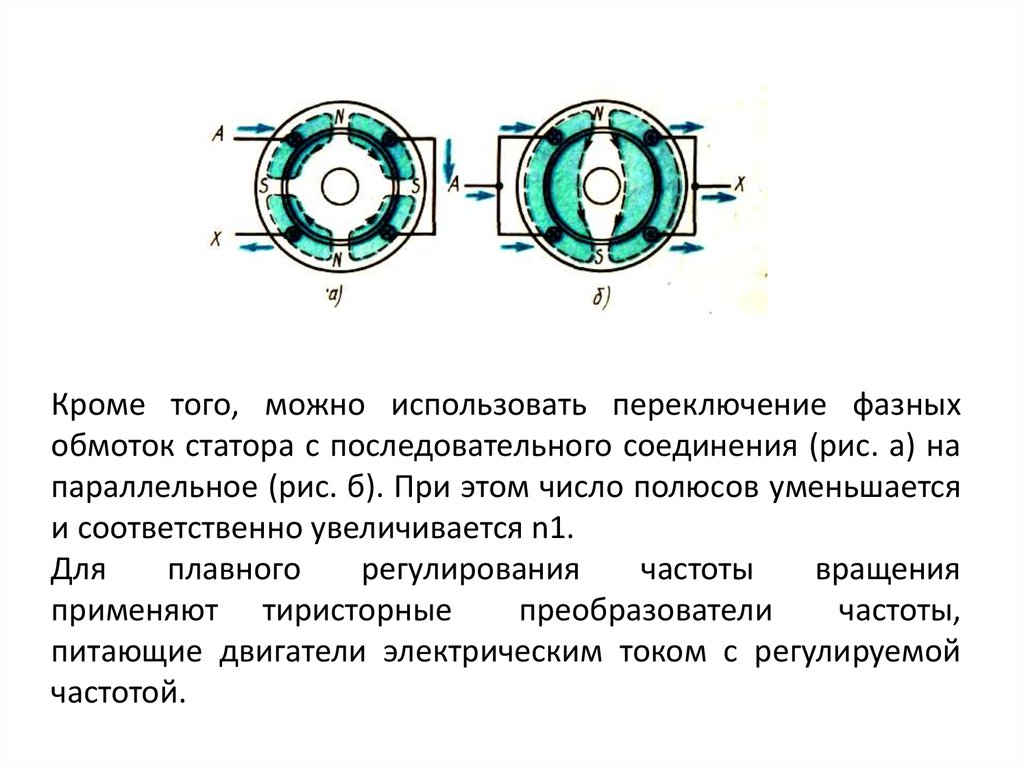
Кроме того, можно использовать переключение фазныхобмоток статора с последовательного соединения (рис. а) на
параллельное (рис. б). При этом число полюсов уменьшается
и соответственно увеличивается n1.
Для
плавного
регулирования
частоты
вращения
применяют тиристорные
преобразователи
частоты,
питающие двигатели электрическим током с регулируемой
частотой.
14.
В двигателях с фазным ротором для регулирования скоростипереключают ступени реостата, включенного в цепь ротора.
Двигатели работают в этих режимах сравнительно
кратковременно.
В
целом
такое
регулирование
неэкономично.
Торможение. При эксплуатации двигателей нередко
возникает необходимость их торможения (быстрый переход
от одного режима к другому, точная остановка и пр.).
15.
Торможение двигателя может быть механическимэлектрическим.
и
При механическом торможении электромагнит или пружины
воздействуют через тормозные колодки на шкив,
закрепленный на валу двигателя.
При электрическом торможении используют либо режим
противовключения, когда у работающего двигателя
переключением двух фаз меняется направление вращения
поля, либо режим динамического торможения, когда после
отключения двигателя от сети в обмотку статора
кратковременно подается постоянный ток.
16.
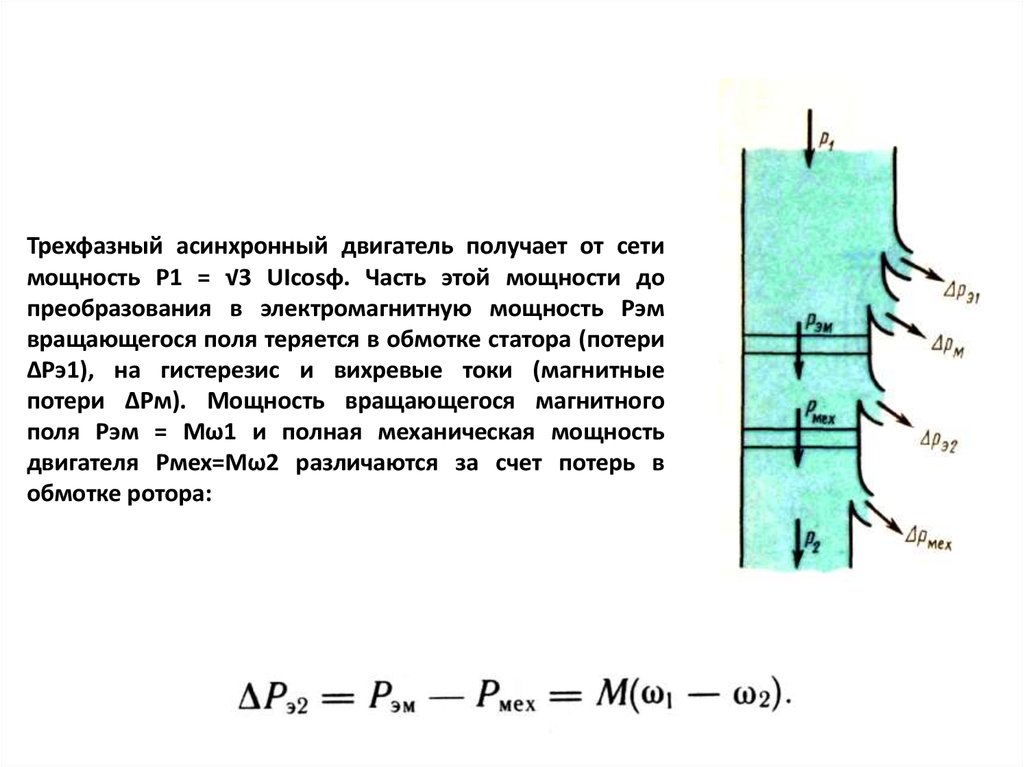
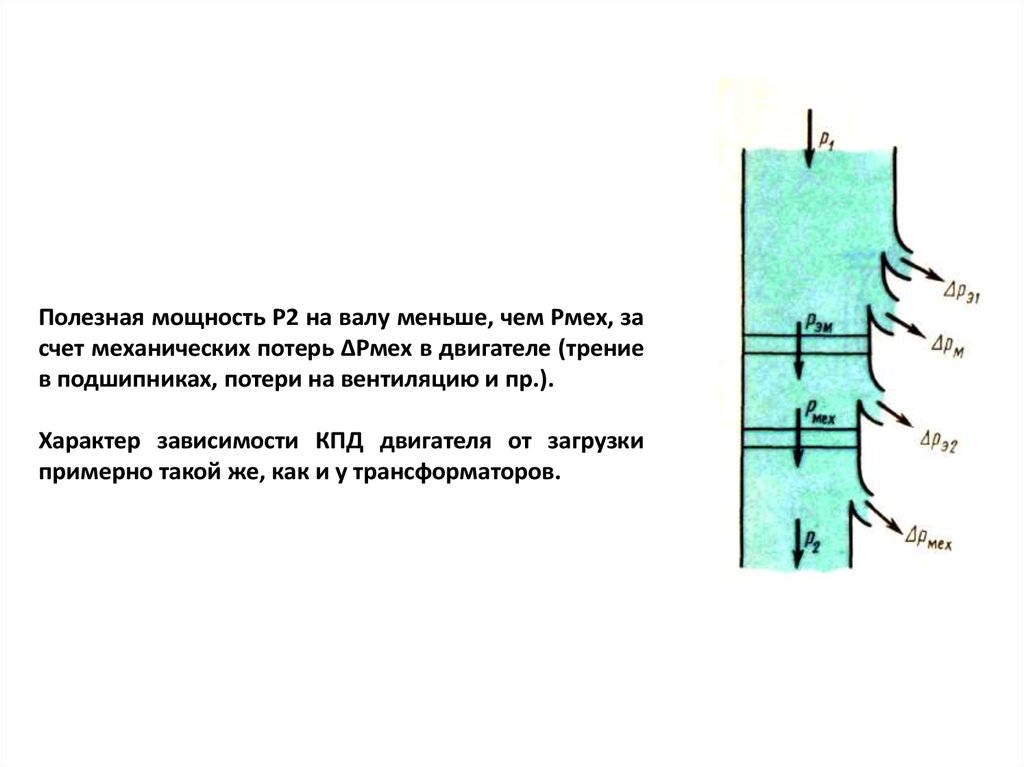
Трехфазный асинхронный двигатель получает от сетимощность P1 = √3 UIcosφ. Часть этой мощности до
преобразования в электромагнитную мощность Рэм
вращающегося поля теряется в обмотке статора (потери
ΔРэ1), на гистерезис и вихревые токи (магнитные
потери ΔPм). Мощность вращающегося магнитного
поля Рэм = Mω1 и полная механическая мощность
двигателя Pмex=Mω2 различаются за счет потерь в
обмотке ротора:
17.
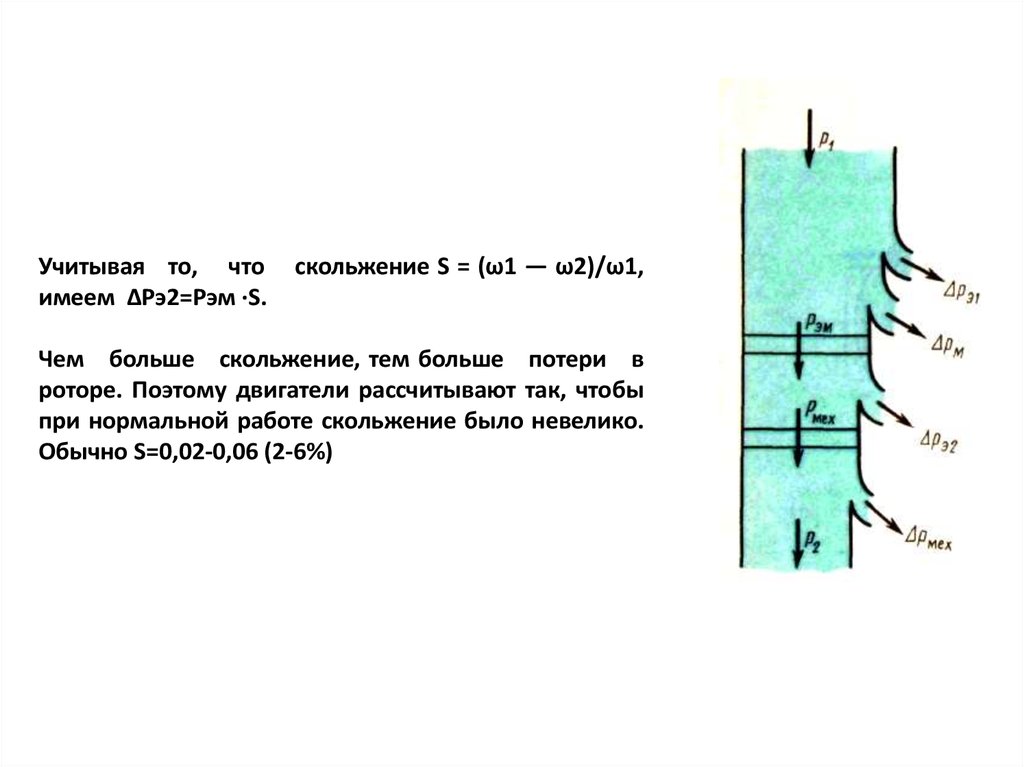
Учитывая то, чтоимеем ΔРэ2=Рэм ·S.
скольжение S = (ω1 — ω2)/ω1,
Чем больше скольжение, тем больше потери в
роторе. Поэтому двигатели рассчитывают так, чтобы
при нормальной работе скольжение было невелико.
Обычно S=0,02-0,06 (2-6%)
18.
Полезная мощность Р2 на валу меньше, чем Рмех, засчет механических потерь ΔРмех в двигателе (трение
в подшипниках, потери на вентиляцию и пр.).
Характер зависимости КПД двигателя от загрузки
примерно такой же, как и у трансформаторов.
19.
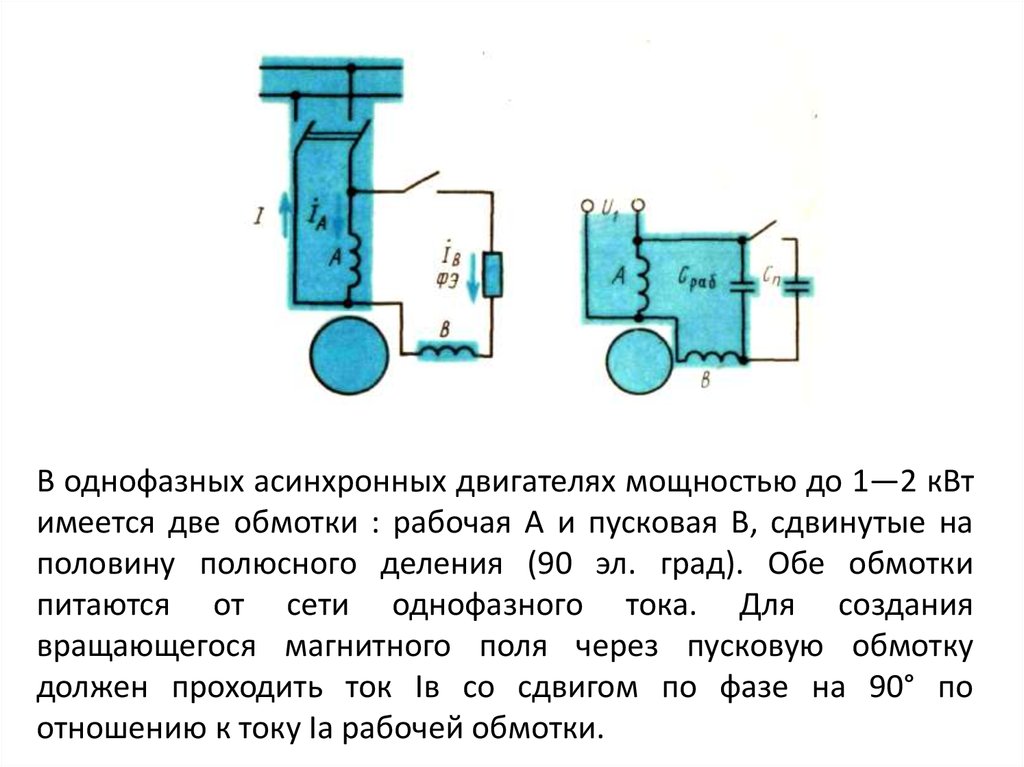
В однофазных асинхронных двигателях мощностью до 1—2 кВтимеется две обмотки : рабочая А и пусковая В, сдвинутые на
половину полюсного деления (90 эл. град). Обе обмотки
питаются от сети однофазного тока. Для создания
вращающегося магнитного поля через пусковую обмотку
должен проходить ток Iв со сдвигом по фазе на 90° по
отношению к току Iа рабочей обмотки.
20.
Это достигается включением в цепь пусковой обмоткифазосдвигающего элемента ФЭ: активного сопротивления
или емкости. После запуска двигателя пусковая обмотка
отключается. Движение поддерживается пульсирующим
полем рабочей обмотки.
21. Пусковые характеристики двигателя с фазным ротором
22. Схема соединения обмоток двигателя с фазным ротором
а – питающая сетьб - ротора
в - на доске
зажимов.
23. Пуск двигателя с фазным ротором: а - схема включения б - механические характеристики
Пуск двигателя с фазным ротором:а - схема включения
б - механические характеристики