
 Промышленность
ПромышленностьПохожие презентации:






")



Контроль объектов авиационного оборудования в условиях априорной неопределенности диагностических моделей. Тема 5
1.
Тема 5. КОНТРОЛЬ ОБЪЕКТОВ АВИАЦИОННОГООБОРУДОВАНИЯ В УСЛОВИЯХ АПРИОРНОЙ
НЕОПРЕДЕЛЕННОСТИ ДИАГНОСТИЧЕСКИХ
МОДЕЛЕЙ
5.1 Виды неопределенностей диагностических
моделей динамических систем (ДС)
2.
– Структурная неопределенность возникает в тех случаях, когда невсе параметры, характеризующие функционирование ДС,
включаются в вектор состояния;
– параметрическая неопределенность возникает в тех случаях, когда
параметры диагностической модели не соответствуют реальным
процессам, протекающим в ДС;
– статистическая неопределенность возникает в тех случаях, когда
законы распределений возмущений и шумов, принятые в
диагностической модели, не соответствуют реальным.
3.
Для компенсации (парирования) неопределенностейдиагностических моделей ОК применяют следующие подходы:
робастные;
адаптивные;
гарантирующие;
подходы, учитывающие нечеткость описания
• диагностических моделей и допусков на контролируемые
параметры;
комбинированные подходы.
Применительно к системам контроля на основе оценивающих
фильтров реализация указанных подходов возможна с применением
следующих технологий.
4.
• Робастные подходы обеспечивают нечувствительностьалгоритмов контроля к малым отклонениям от априорных
предположений о параметрах диагностической модели;
• Адаптивные подходы предусматривают настройку параметров
диагностической модели заданной структуры для обеспечения
требуемой достоверности контроля.
• Гарантирующие подходы ограничивают ошибки контроля в
установленных пределах независимо от вида неопределенности.
• Подходы, учитывающие нечеткое описание диагностических
моделей, опираются на применение функций принадлежности,
отражающие степень доверия к диагностическим параметрам и
принимаемым решениям.
• Комбинированные подходы.
5. 5.2 Постановка и решение задачи оценивания параметров состояния ДС в условиях априорной неопределенности
6.
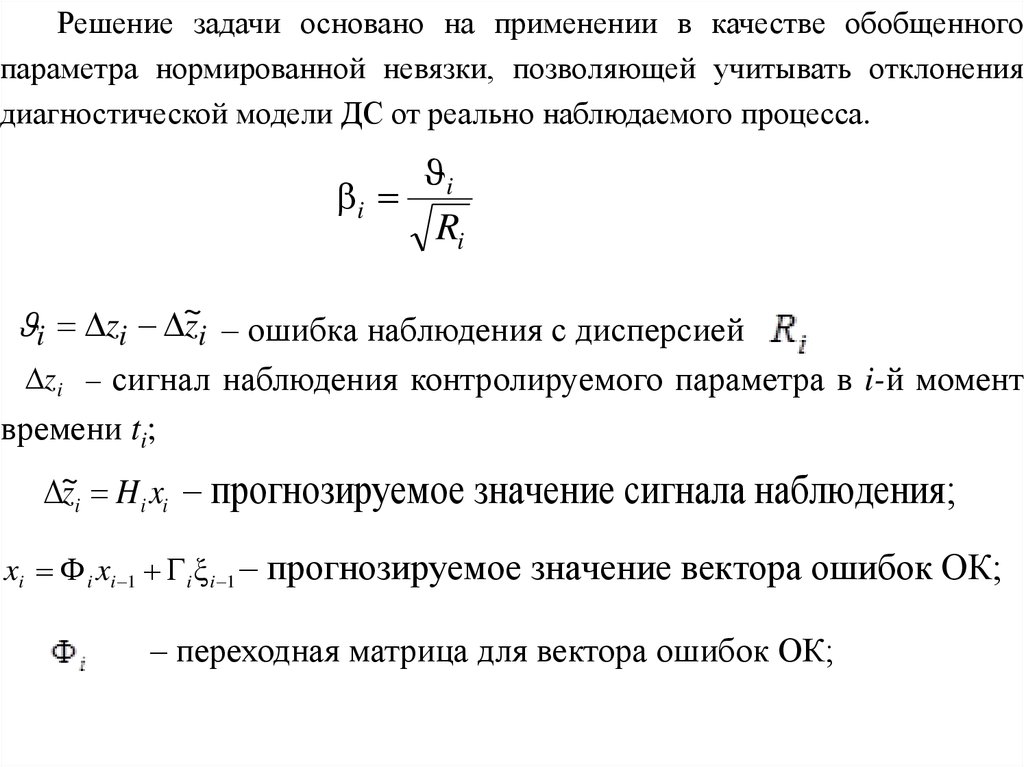
Решение задачи основано на применении в качестве обобщенногопараметра нормированной невязки, позволяющей учитывать отклонения
диагностической модели ДС от реально наблюдаемого процесса.
i
i
Ri
i zi ~zi – ошибка наблюдения с дисперсией
zi – сигнал наблюдения контролируемого параметра в i-й момент
времени ti;
~z H x
i
i i
– прогнозируемое значение сигнала наблюдения;
xi Ф i xi 1 Г i ξ i 1 – прогнозируемое значение вектора ошибок ОК;
– переходная матрица для вектора ошибок ОК;
7.
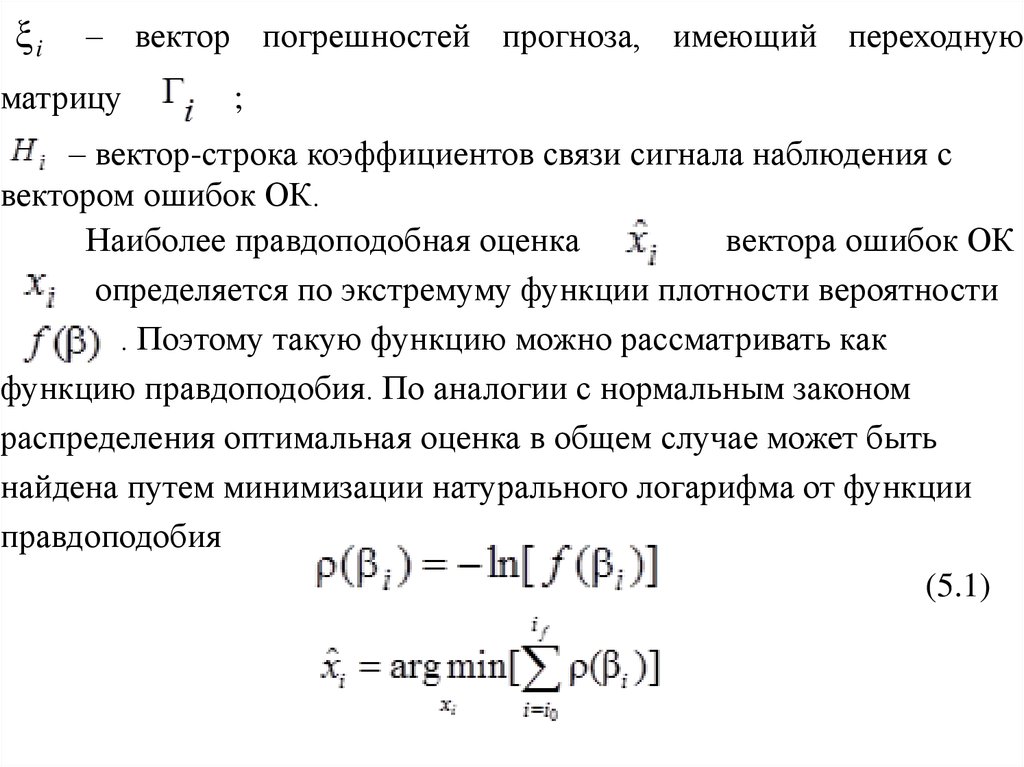
i– вектор погрешностей прогноза, имеющий переходную
матрицу
;
– вектор-строка коэффициентов связи сигнала наблюдения с
вектором ошибок ОК.
Наиболее правдоподобная оценка
вектора ошибок ОК
определяется по экстремуму функции плотности вероятности
. Поэтому такую функцию можно рассматривать как
функцию правдоподобия. По аналогии с нормальным законом
распределения оптимальная оценка в общем случае может быть
найдена путем минимизации натурального логарифма от функции
правдоподобия
(5.1)
8.
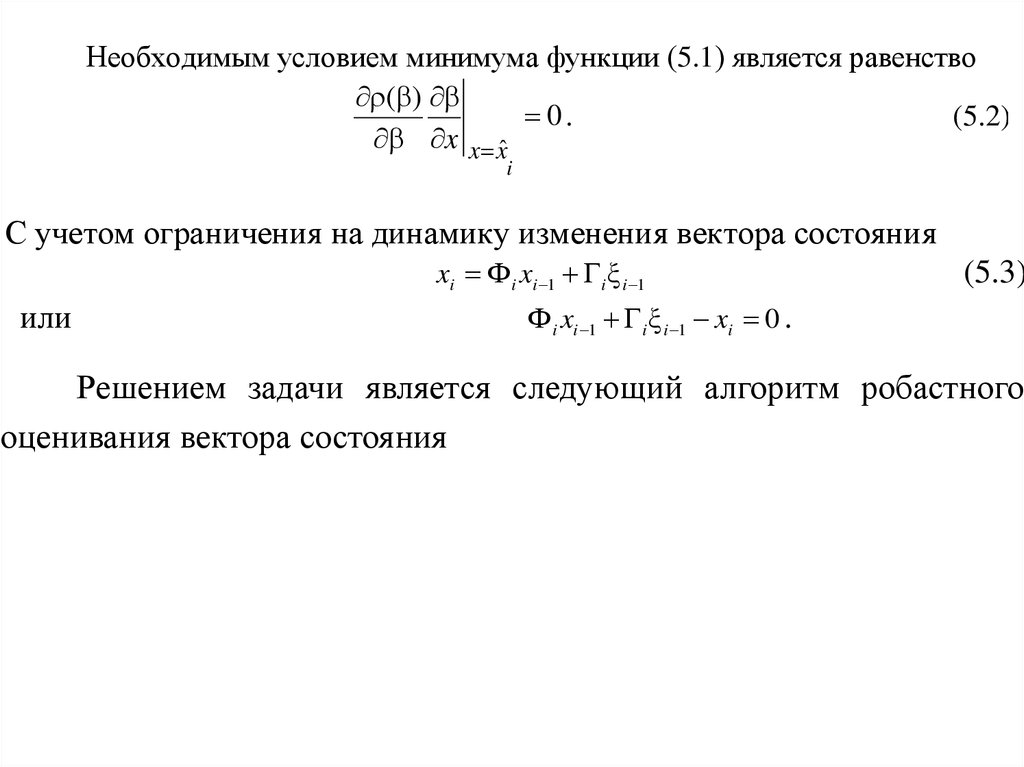
Необходимым условием минимума функции (5.1) является равенство( )
0.
(5.2)
x x xˆ
i
С учетом ограничения на динамику изменения вектора состояния
xi Ф i xi 1 Г i ξ i 1
или
(5.3)
Ф i xi 1 Г i ξ i 1 xi 0 .
Решением задачи является следующий алгоритм робастного
оценивания вектора состояния
9.
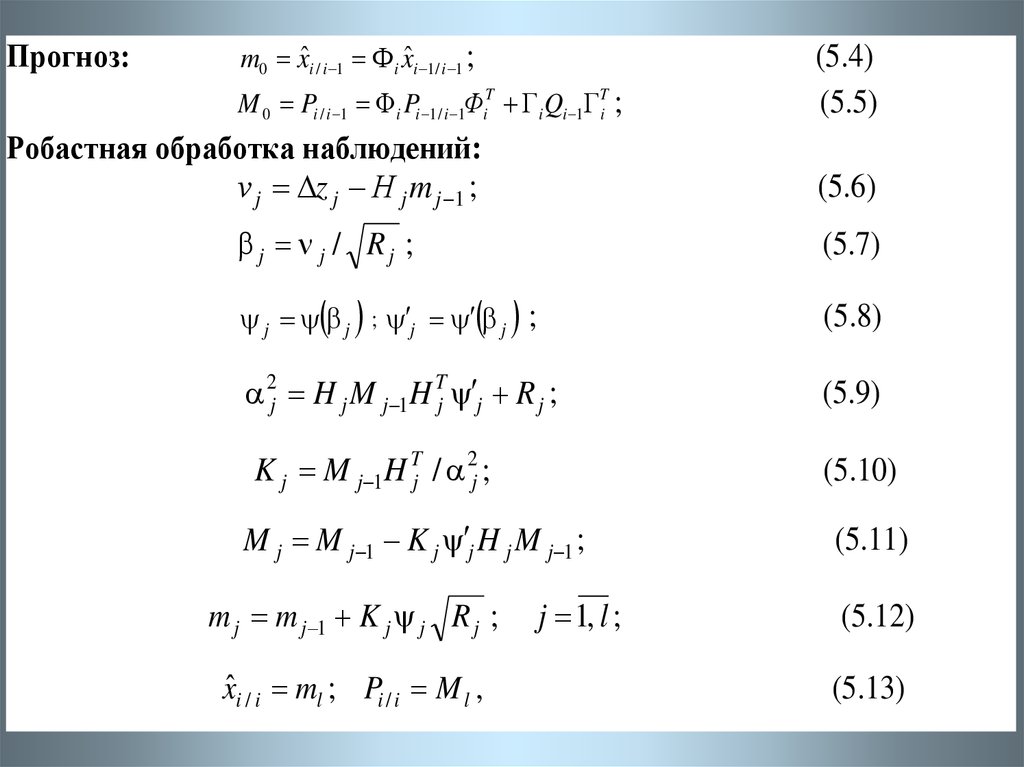
Прогноз:m0 xˆi / i 1 Фi xˆi 1/ i 1 ;
M 0 Pi / i 1 Φ i Pi 1 / i 1ΦiT Γ i Qi 1ΓTi ;
Робастная обработка наблюдений:
ν j z j Н j m j 1 ;
(5.4)
(5.5)
(5.6)
j j / Rj ;
(5.7)
j j ; j j ;
(5.8)
2j H j M j 1H Tj j R j ;
(5.9)
K j M j 1H Tj / 2j ;
(5.10)
M j M j 1 K j j H j M j 1 ;
m j m j 1 K j j R j ;
xˆi / i ml ; Pi / i M l ,
j 1, l ;
(5.11)
(5.12)
(5.13)
10.
гдеM j ; Pi / i – значения ковариационных матриц ошибок оценивания после
обработки соответственно j-го элемента и всего вектора наблюдений zi
размерности l 1; Фi , Γi – переходные матрицы для вектора ошибок и
возмущений ОК соответственно; H i [ H1T H 2T H Tj H lT ]T – матрица связи
вектора наблюдений zi с вектором ошибок ОК; H j – вектор-строка
коэффициентов связи j-го элемента z j вектора наблюдений zi с вектором
ошибок xi ; R j – дисперсия ошибки j-го наблюдения.
( )
( ) ,
В алгоритме (5.4) - (5.13) функция ( ) и ее производная ( ) позволяют
учитывать отклонение параметров диагностической модели от априорно
предполагаемых при оценке состояния ОК.