







 микродвигатели")


 Электроника
ЭлектроникаПохожие презентации:




")





Микродвигатели. Универсальные коллекторные микродвигатели
1. Микродвигатели
2. Микродвигатели
3. Универсальные коллекторные микродвигатели
• Универсальными коллекторными микродвигателями называют микродвигатели, которыемогут работать как от сети постоянного тока, так и от однофазной сети переменного тока. В
настоящее время универсальные коллекторные микродвигатели выполняют только с
последовательным возбуждением.
1. При питании двигателя от сети переменного напряжения ток якоря и поток возбуждения
изменяются по синусоидальному закону:
где i и Im– мгновенное и амплитудное значения тока;β– сдвиг по фазе между потоком возбуждения и
током в якоре; φи Фm– мгновенное и амплитудное значения потока;ω1– угловая частота тока.
4.
• 2. Характеристики универсального коллекторного микродвигателя при питании от сетипеременного тока несколько хуже, чем при питании от сети постоянного тока. Причина
расхождения характеристик состоит в том, что при переменном токе на ток и его фазу
существенное влияние оказывают индуктивные сопротивления обмоток якоря и
возбуждения.
3. При работе универсального коллекторного микродвигателя от сети переменного тока
существенно ухудшается коммутация и усиливается искрение под щетками. Это объясняется
тем, что коммутирующая катушка в данном случае пронизывается пульсирующим
магнитным потоком возбуждения и в ней наводится трансформаторная эдс.
Универсальные коллекторные микродвигатели довольно широко распространены
благодаря тому, что они:
• 1) работают от источников как постоянного, так и переменного тока;
• 2) при работе от любого из источников позволяют просто, плавно и широко регулировать
угловую скорость ротора изменением подводимого к двигателю напряжения и
шунтированием якоря или обмотки возбуждения активным сопротивлением;
• 3) позволяют получать на промышленной частоте весьма высокую угловую скорость ротора
(до 2000 рад/с), недостижимую при применении синхронных и асинхронных двигателей
промышленной частоты без повышающего редуктора.
5. Двухфазные асинхронные микродвигатели
По сравнению с асинхронными микродвигателями общего применения исполнительныемикродвигатели имеют повышенное активное сопротивление ротора. Это связано с
требованиями обеспечения устойчивой работы исполнительных микродвигателей во всем рабочем диапазоне угловых скоростей (скольжение s= 0÷1) и исключения параметрического
самохода.
В зависимости от конструкции ротора различают три основных типа исполнительных
асинхронных микродвигателей: с короткозамкнутым ротором типа «беличья клетка», с полым
немагнитным и полым ферромагнитным роторами.
Исполнительные асинхронные микродвигатели с ротором типа «беличья клетка» имеют такое
же устройство, как и трехфазный асинхронный двигатель с аналогичным ротором. Отличие
состоит только в том, что в настоящее время их выпускают в основном так называемой
сквозной конструкции.
6.
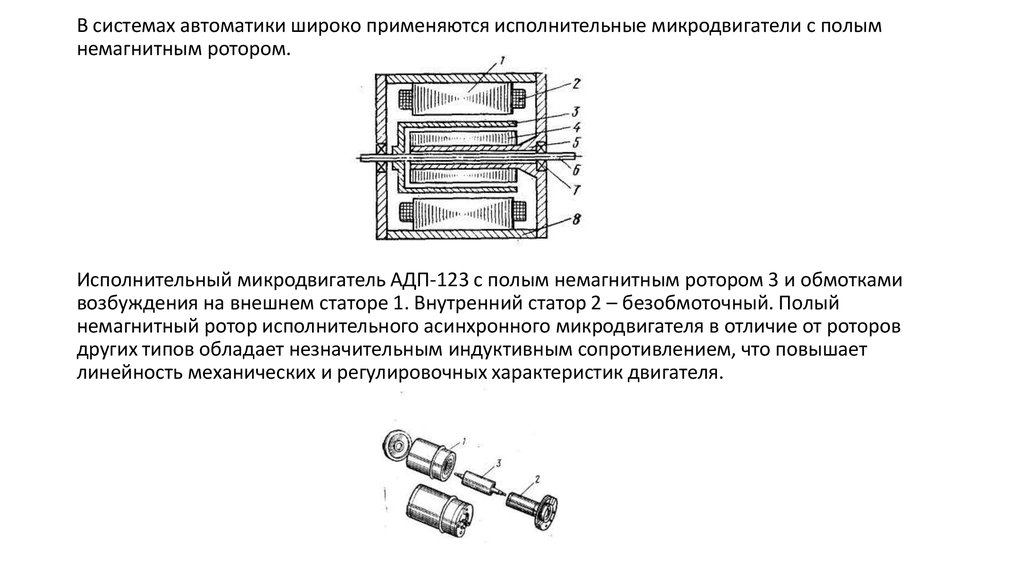
В системах автоматики широко применяются исполнительные микродвигатели с полымнемагнитным ротором.
Исполнительный микродвигатель АДП-123 с полым немагнитным ротором 3 и обмотками
возбуждения на внешнем статоре 1. Внутренний статор 2 – безобмоточный. Полый
немагнитный ротор исполнительного асинхронного микродвигателя в отличие от роторов
других типов обладает незначительным индуктивным сопротивлением, что повышает
линейность механических и регулировочных характеристик двигателя.
7.
• Гладкая цилиндрическая поверхность полого немагнитного ротора способствует снижениюуровня шумов, создаваемых двигателем. Отсутствие радиальных сил притяжения полого
немагнитного ротора к статору, уменьшение массы ротора и соответственно момента
трения в подшипниках обеспечивают уменьшение напряжения трогания.
• Недостатком микродвигателя с полым немагнитным ротором является большой
немагнитный зазор. Из-за большого немагнитного зазора между внешним и внутренним
статорами, составляющего 0,5 – 1,5 мм, эти двигатели имеют значительный
намагничивающий ток (0,8 – 0,9 от номинального) и низкий коэффициент мощности.
Микродвигатели с полым немагнитным ротором менее надежны при высоких
температурах, вибрации и ударах, так как вероятность деформации полого немагнитного
ротора в указанных условиях выше, чем ротора типа «беличья клетка».
8. Микродвигатели с расщепленными экранированными полюсами
• Наиболее простыми однофазными двигателями переменного тока являются микродвигатели срасщепленными экранированными полюсами (рис. 2.19, а) в асинхронном и синхронном исполнении.
Статор 1 такого двигателя явнополюсный и состоит из двух пакетов электротехнической стали. На
статоре имеется однофазная обмотка возбуждения 2. На каждом из полюсов 3 находится продольный
паз, в котором размещается одна из сторон короткозамкнутых витков 4, охватывающих и
экранирующих часть (от 1/5до1/2полюсной дуги) полюса. В расточке полюсов помещается ротор 5
двигателя.
Векторная диаграмма микродвигателя.
Конструкция ротора зависит от типа микродвигателя. В двигателях асинхронного исполнения ротор
типа «беличья клетка», полый немагнитный или ферромагнитный. При синхронном варианте ротор
может быть с постоянным магнитным (активный), из магнитотвердого материала (гистерезисный) или
с переменным вдоль окружности магнитным сопротивлением (реактивный).
9.
• Существенным преимуществом однофазных микродвигателей с расщепленными полюсами кромепростоты конструкции и небольшой стоимости является их надежная работа при частых пусках и
остановах под напряжением. Это объясняется тем, что основными потерями в двигателе являются
электрические потери в короткозамкнутых витках. Следовательно, полные потери в двигателе
практически не меняются от режима холостого хода до короткого замыкания (остановки ротора при
напряжении на зажимах обмотки возбуждения) и не происходит недопустимого перегрева обмотки
возбуждения.
• Один из основных недостатков описываемых микродвигателей состоит в том, что вследствие
существенной эллиптичности магнитного поля они развивают незначительный пусковой момент.
10. Синхронные микродвигатели с постоянными магнитами на роторе
• В синхронных микродвигателях с постоянными магнитами наиболее распространенными являютсяроторы с радиальным (а) и аксиальным (б) расположением постоянных магнитов и короткозамкнутой
обмотки.
Ротор состоит из двух основных частей:
• а) постоянных магнитов 1, создающих магнитный поток возбуждения ротора и обеспечивающих
возникновение электромагнитного момента в синхронном режиме;
• б) короткозамкнутой обмотки типа «беличья клетка» 3, уложенной в сердечник 2 из
электротехнической стали и обеспечивающей возникновение электромагнитного момента в процессе
асинхронного пуска.
Электромагнитный момент создается в результате взаимодействия вращающегося поля статора с полем
возбуждения ротора, которые вращаются с одинаковой угловой скоростью, равной угловой скорости
ротора.
11.
Принцип работы синхронного микродвигателя основан на способности обмотки статора создаватьвращающееся магнитное поле.
У синхронных микродвигателей с постоянными магнитами применяют асинхронный метод пуска, т.е. в
процессе разгона ротора до угловой скорости, близкой к синхронной, двигатель работает как
асинхронный. Вращающееся магнитное поле статора во взаимодействии с токами, наведенными этим
полем в короткозамкнутой обмотке ротора, создает асинхронный момент Ма.
Особенность пуска таких микродвигателей по сравнению с двигателями с электромагнитным
возбуждением заключается в том, что он происходит при наличии потока возбуждения ротора. Этот
поток при вращении ротора наводит в обмотках статора э.д.с., частота которой не равна частоте
напряжения питания. Под действием э.д.с. в цепи обмоток статора проходят токи, которые во
взаимодействии с вызвавшим их потоком ротора создают тормозной момент Μт, направленный
встречно к асинхронному вращающему моменту Ma.
12. Гистерезисные микродвигатели
Синхронным гистерезисным называют микродвигатель, вращающий момент которого возникает за счетгистерезиса при перемагничивании ротора.
Силы взаимодействия элементарных магнитиков, например M1иM2, с потоком статора Fэм направлены
вдоль этого потока и вращающего момента не создают. При перемещении потока статора в положение Б
в том же направлении будут поворачиваться и элементарные магнитики (рис. 2.35, б). Однако
вследствие явления гистерезисного запаздывания магнитикиM1иM2не повернутся на тот же угол, что и
поток Ф1и между ними образуется угол гистерезисного запаздывания γг. После этого силы
взаимодействия Fэм будут иметь тангенциальные составляющие Ft, которые и создадут гистерезисный
момент асинхронного режима Mг.а.
13. Возникающий гистерезисный момент пропорционален модулю векторного произведения пространственных векторов магнитного потока
Возникающий гистерезисный момент пропорционален модулю векторного произведенияпространственных векторов магнитного потока ротора Ф2, образованного элементарными магнитиками,
и м.д.с. статора F1, которые вращаются с одинаковой угловой скоростью со сдвигом на угол γг:
14. Шаговые (импульсные) микродвигатели
Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, у которых питаниефаз обмотки якоря осуществляется путем подачи импульсов напряжения от какого-либо (например,
электронного) коммутатора.
15.
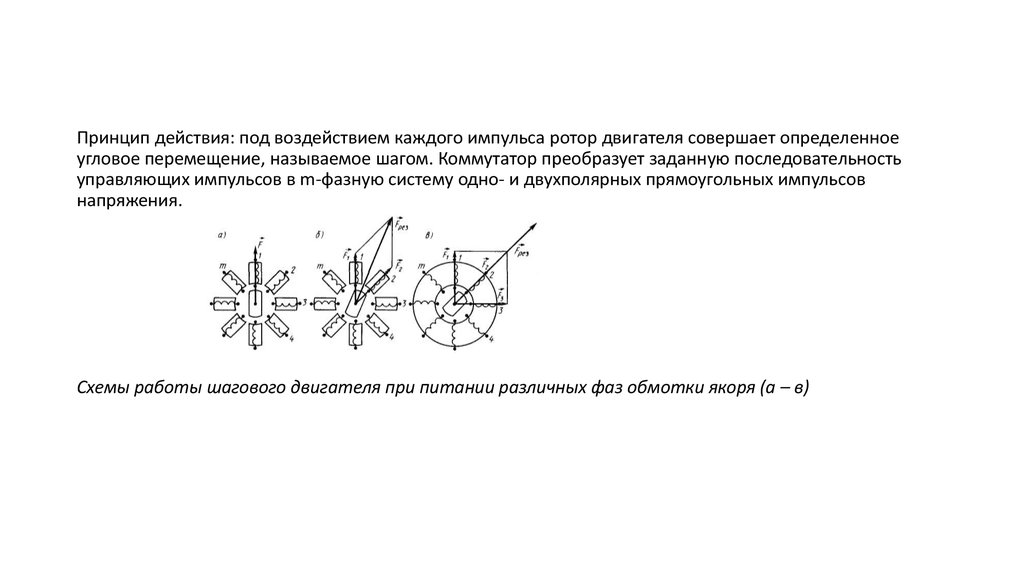
Принцип действия: под воздействием каждого импульса ротор двигателя совершает определенноеугловое перемещение, называемое шагом. Коммутатор преобразует заданную последовательность
управляющих импульсов в m-фазную систему одно- и двухполярных прямоугольных импульсов
напряжения.
Схемы работы шагового двигателя при питании различных фаз обмотки якоря (а – в)
16. Лазерный микродвигатель
Для прецизионного управления малыми космическими аппаратами массой около 1 кг требуетсясоздать микродвигатели, производящие импульсы тяги на уровне 10 -9 Н·с.
Задача по разработке микродвигателя для наноспутников может быть успешно решена с
использованием явления лазерной абляции (испарения под действием излучения) благодаря высокой
стабильности и эффективности современных импульсных твердотельных лазеров. Короткая
длительность лазерного импульса в сочетании с высокой плотностью энерговыделения на поверхности
мишени позволяют генерировать плазменный сгусток микроскопического размера с высокой скоростью
истечения плазмы и практически полным отсутствием капельной фракции.
В основе лазерно-плазменного двигателя лежит явление светоабляционного давления. Давление в
плазме, создаваемой при лазерной абляции, приводит к высоким скоростям истечения вещества.
17.
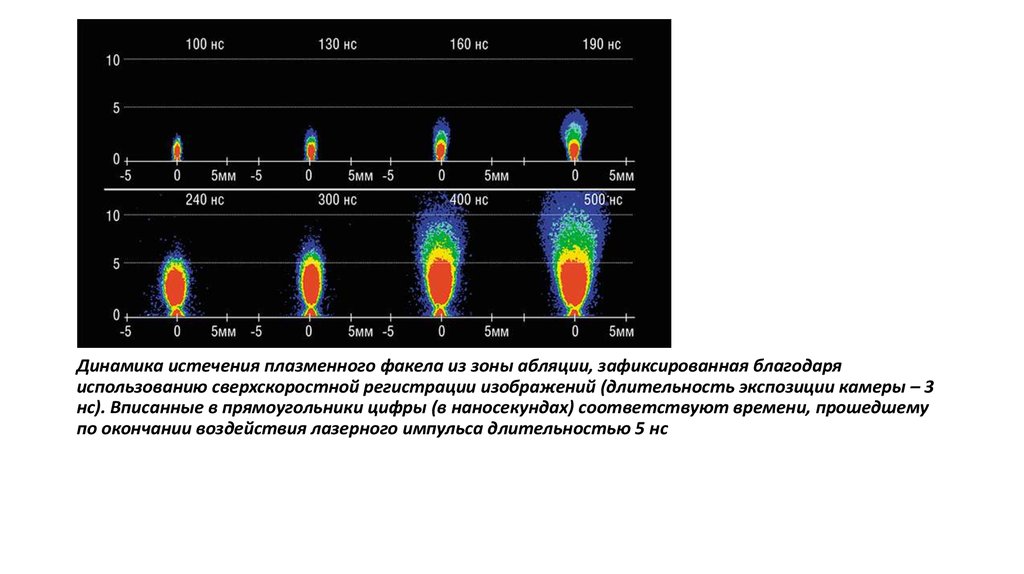
Динамика истечения плазменного факела из зоны абляции, зафиксированная благодаряиспользованию сверхскоростной регистрации изображений (длительность экспозиции камеры – 3
нс). Вписанные в прямоугольники цифры (в наносекундах) соответствуют времени, прошедшему
по окончании воздействия лазерного импульса длительностью 5 нс
18. Лазерное зажигание
Использование лазерно-плазменного двигателя особенно привлекательно в качестве системыуправления ориентацией малых (размером с яблоко и меньше) космических аппаратов. При этом для
работы микродвигателя достаточно единственного лазера с разводкой лазерного излучения к мишенносопловым узлам с помощью элементов волоконной оптики. Такая конструкция позволяет существенно
снизить весогабаритные и энергетические характеристики двигательной установки спутника.