





























































































































































































 Электроника
Электроника Промышленность
ПромышленностьПохожие презентации:









")
Переходные режимы в электроприводах. Автоматическое управление электроприводами в релейно-контакторных схемах
1.
Переходные режимы в электроприводах. Автоматическоеуправление
электроприводами в релейно-контакторных схемах
2.
IE Rя
U
Rд1
KM 1
M
LM
Принципиальная схема прямого пуска двигателя
постоянного тока независимого возбуждения
3.
ωω0
ωу
0
Iс
I кз
I
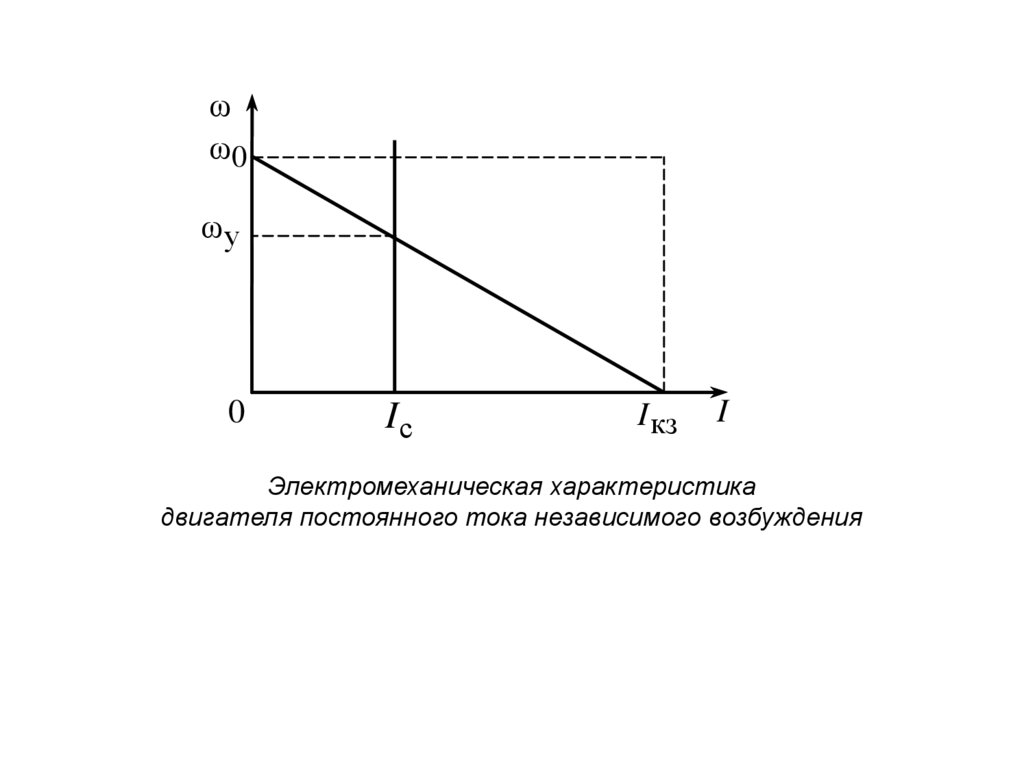
Электромеханическая характеристика
двигателя постоянного тока независимого возбуждения
4.
05%
2
1
0
Tм
2Tм
3Tм
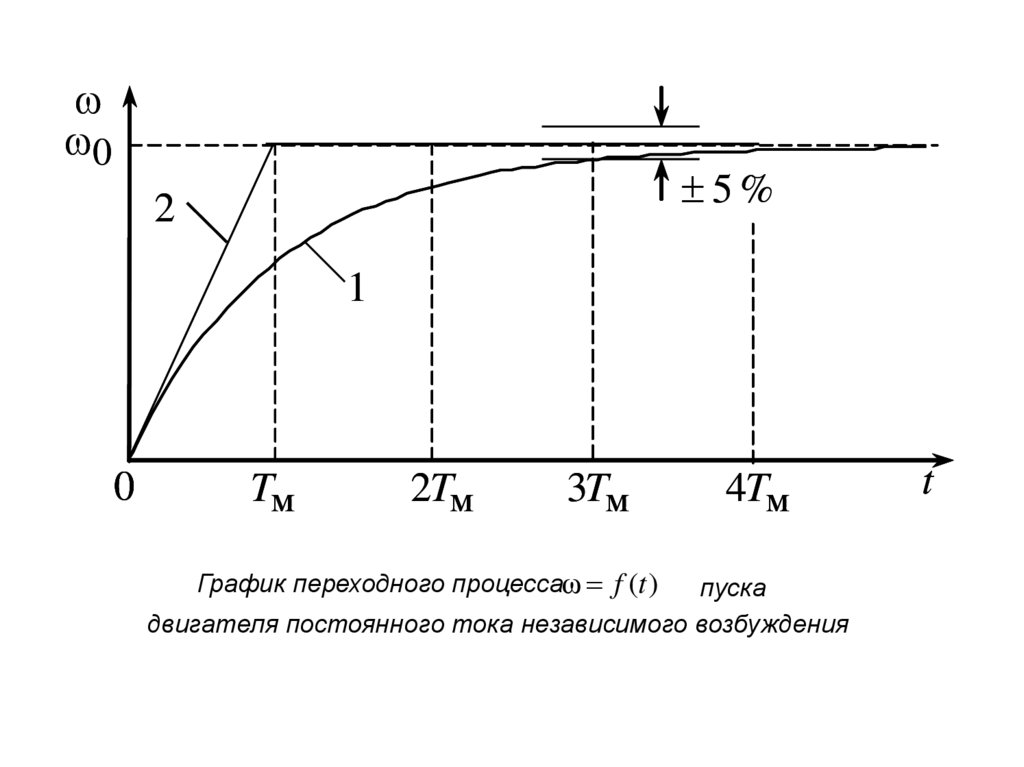
График переходного процессаω f (t )
4Tм
пуска
двигателя постоянного тока независимого возбуждения
t
5.
II кз
I f (t )
0
Tм
2Tм
3Tм
4Tм
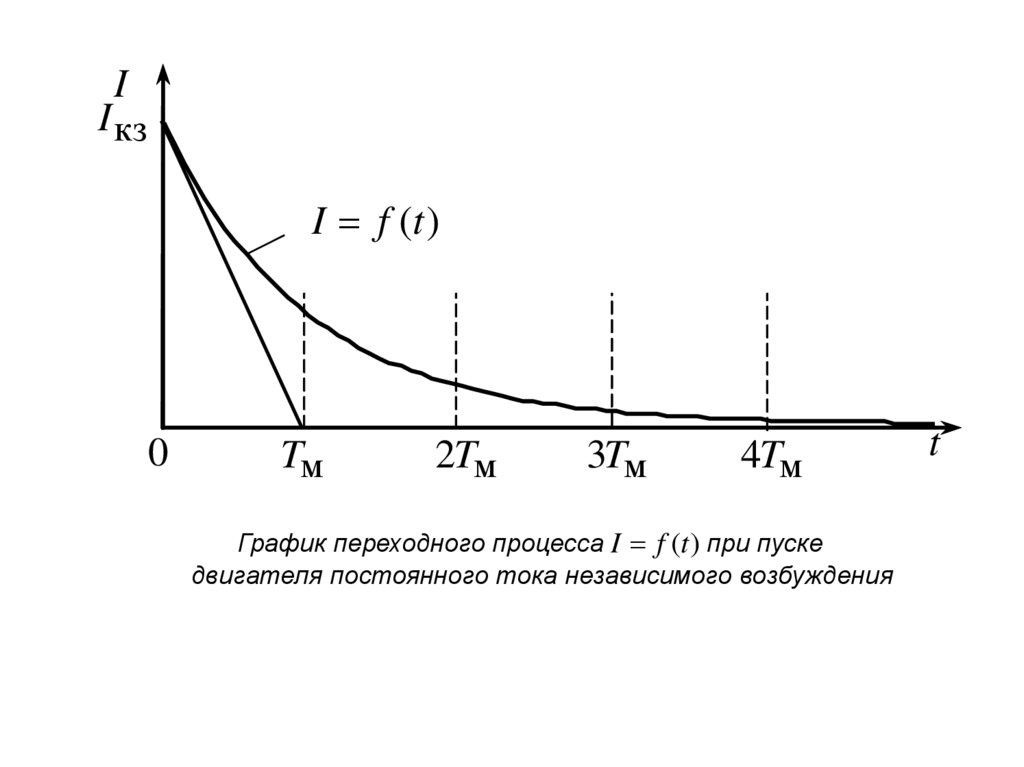
График переходного процесса I f (t ) при пуске
двигателя постоянного тока независимого возбуждения
t
6.
URя
M
LM
KM1 KM 2
KM
Rд1
Rд2
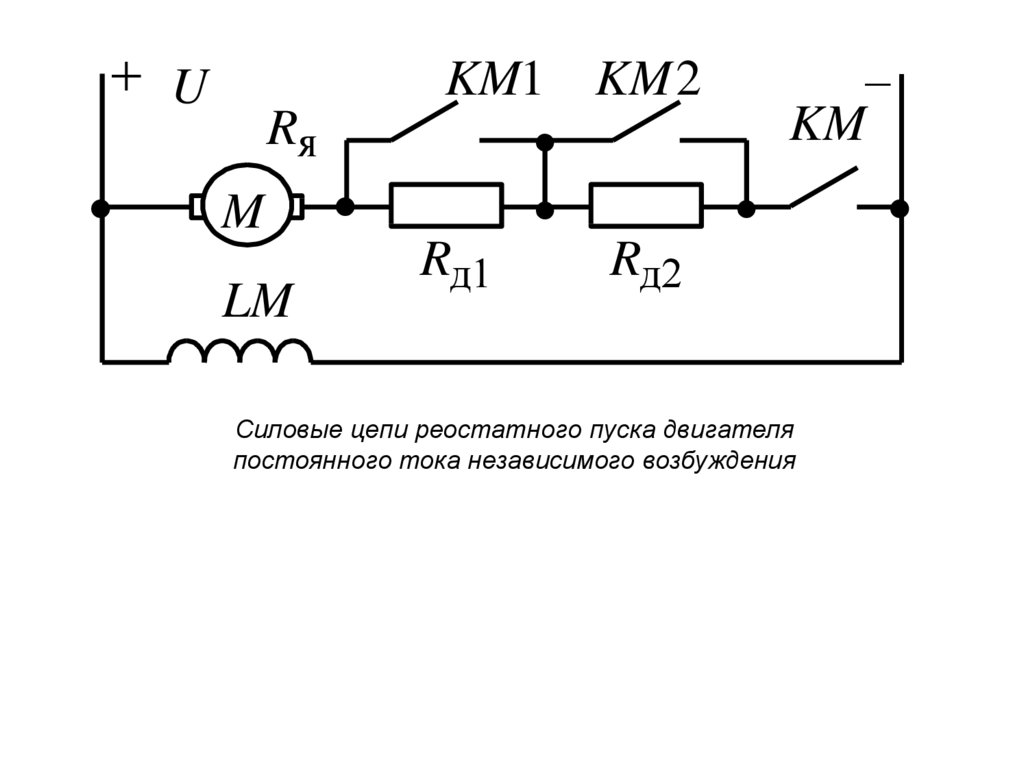
Силовые цепи реостатного пуска двигателя
постоянного тока независимого возбуждения
7.
0у3
у2
у1
3
п2
п1
2
1
Iс
I пер
I доп
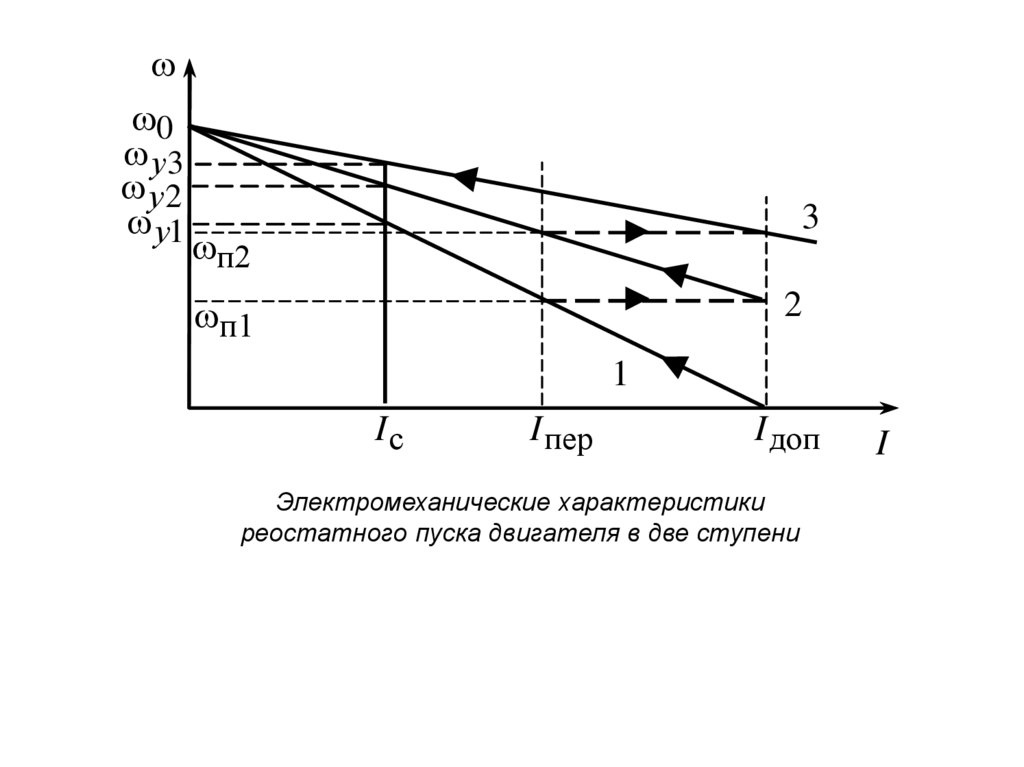
Электромеханические характеристики
реостатного пуска двигателя в две ступени
I
8.
, If (t )
I доп
п2
I пер
п1
I f (t )
t1
t2
t
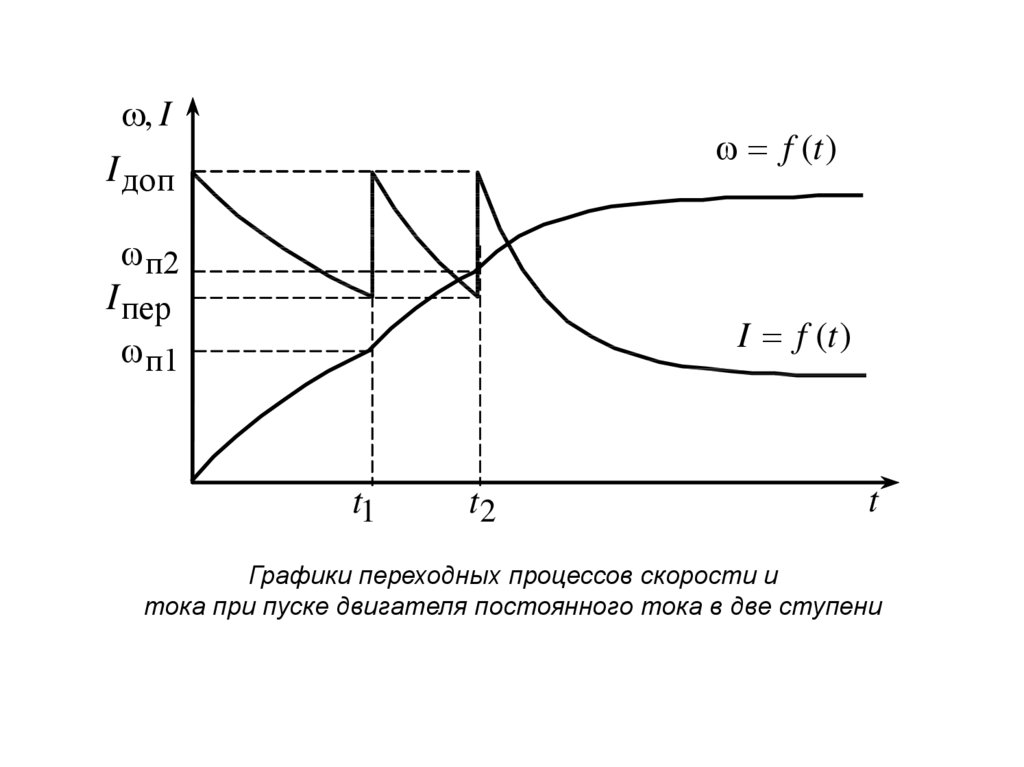
Графики переходных процессов скорости и
тока при пуске двигателя постоянного тока в две ступени
9.
LMRя
M
U
KM 2 KM 1
KM
Rд2
Rд1
KM 1
KM 2
SB 2
SB1
KM
KM
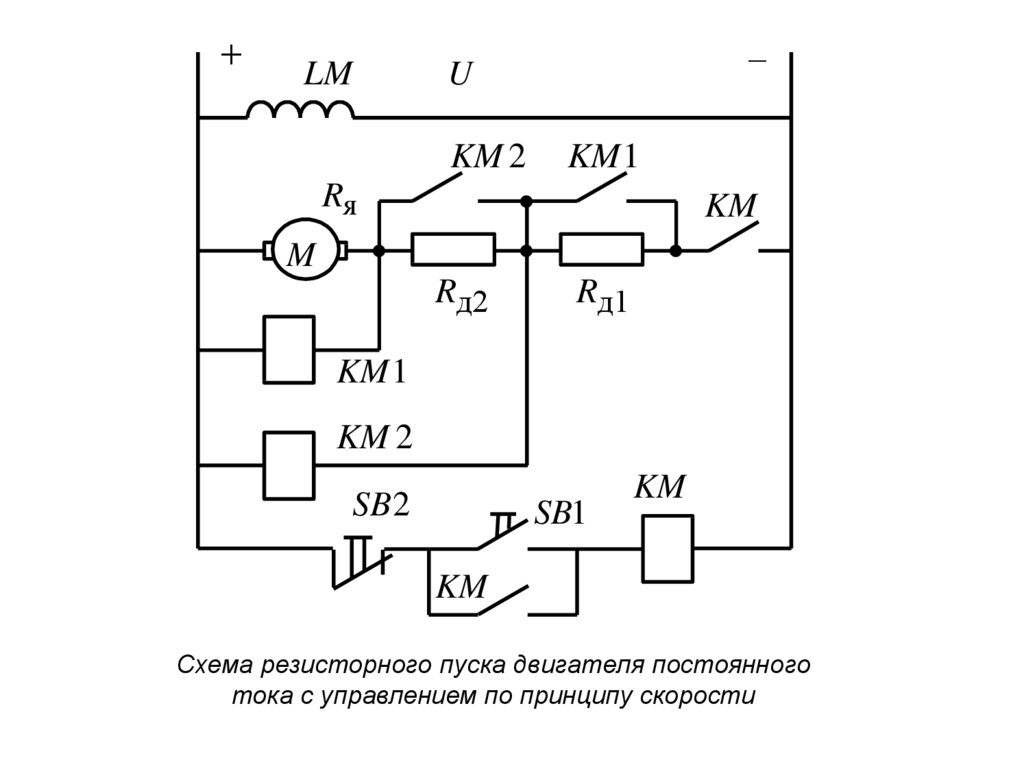
Схема резисторного пуска двигателя постоянного
тока с управлением по принципу скорости
10.
LMRя
M
U
KM 2 KM 1
KM
Rд2
Rд1
SB 2
KM
KT 2
SB1
KT 1
KM
KM
KM 1
KT 1
KM
KT 2
KM 2
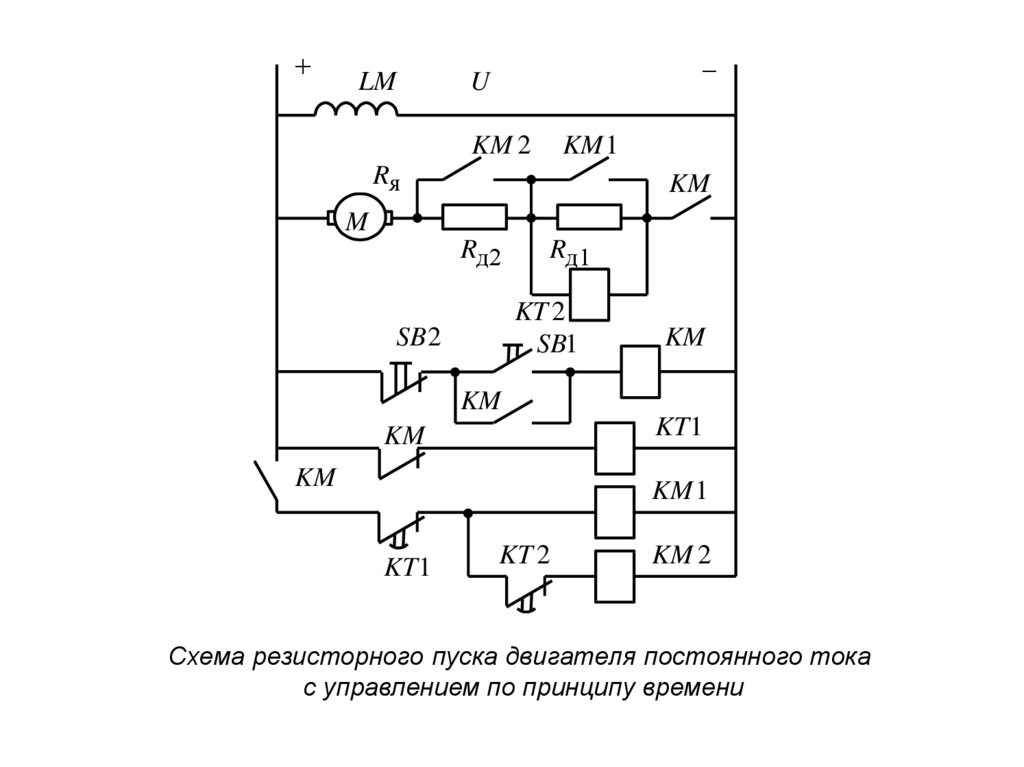
Схема резисторного пуска двигателя постоянного тока
с управлением по принципу времени
11.
LMU
KM 1 KA2
KM 2
Rя
M
KA1 KM
Rд2
Rд1
KV1
KV 2
SB2
KV1
KV 2
SB1
KM
KM 1
KA2
KA1
KM 1
KM 2
KM
KM 1
KM 2
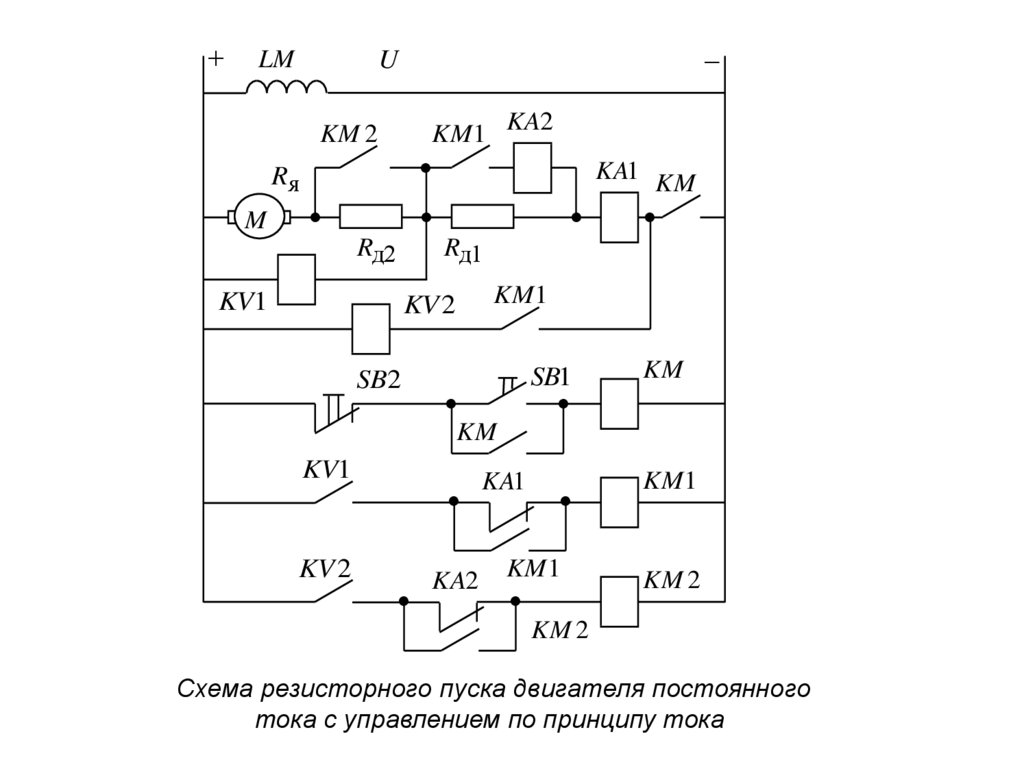
Схема резисторного пуска двигателя постоянного
тока с управлением по принципу тока
12. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.1. Общие сведенияРис. 3.1. Электрические преобразователи
Имея на входе переменное напряжение неизменных амплитуды и частоты, электрический
преобразователь может преобразовать его как в переменное напряжение той же частоты, но
другой амплитуды, так и в переменное напряжение с другими амплитудой и частотой. В первом
случае электрический преобразователь называют преобразователем напряжения (ПН), во
втором – преобразователем частоты (ПЧ).
13. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.1. Общие сведенияРис. 3.1. Электрические преобразователи
Электрический преобразователь может выполнять функцию выпрямителя, т.е. преобразовывать
переменное напряжение в постоянное, либо инвертора –
преобразовывать постоянное
напряжение в переменное, если источник энергии находится на стороне постоянного напряжения.
14. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.2 Управляемые выпрямителиРис. 3.2. Нулевые схемы выпрямления
Существуют различные схемы управляемых выпрямителей на тиристорах, отличающиеся
числом фаз источника переменного напряжения, способом соединения тиристоров, подключения
нагрузки (с неизменным направлением тока в ней или с возможностью его изменения) и т.п.
15. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.2 Управляемые выпрямителиРис. 3.3. Трехфазная нулевая схема с трансформатором (а) и
диаграмма фазных ЭДС (б)
16. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.2 Управляемые выпрямителиРассмотрим три случая:
- нагрузку в виде активного сопротивления R;
- нагрузку R – L;
- нагрузку в виде ЭДС (Е) и достаточно большой индуктивности (L).
Работа управляемого выпрямителя (нулевая схема)
на активное сопротивление
Рис. 3.4. Диаграммы
основных величин в
трехфазной нулевой
схеме
17. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.2 Управляемые выпрямителиРабота управляемого выпрямителя (нулевая схема)
на активное сопротивление
Рис. 3.5. Нулевая схема с
секционированной вторичной
обмоткой трансформатора
18. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.2 Управляемые выпрямителиРабота управляемого выпрямителя (нулевая схема)
на активное сопротивление
Ed Ed 0 cos
Рис. 3.6. Диаграмма
основных величин в
трехфазной
нулевой схеме, нагруженной активным сопротивлением и 0
(3.2-1)
Рис. 3.7. Диаграмма
основных величин в
трехфазной нулевой
схеме при нагрузке
R-Lи 0
19. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.2 Управляемые выпрямителиEd Ed 0 cos
(3.2-1)
Рис. 3.8. Диаграммы
основных величин в
трехфазной нулевой
схеме при нагрузке
R—L—E и 0
20. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.2 Управляемые выпрямителиПри больших α (малых β) возникает опасность опрокидывания инвертора, когда нарушаются
условия закрывания тиристора в конце интервала его проводимости.
В рассматриваемом идеализированном случае эта аварийная ситуация (все тиристоры открыты)
соответствует α = 180° (β = 0), реальные же схемы, когда коммутация тока от тиристора к тиристору
происходит не мгновенно, обычно уже не работают при углах α, превышающих 150°.
Основной недостаток нулевых схем выпрямления – высокие пульсации выпрямленного напряжения.
Уменьшить пульсации возможно в мостовых схемах выпрямления, являющихся сочетанием двух
нулевых (рис. 3.9, а), в одной из которых соединены катоды, в другой – аноды; нагрузка включается
между этими общими точками, т.е. специальный вывод нулевой точки уже не требуется.
21. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.2 Управляемые выпрямителиРис. 3.9. Мостовая схема выпрямления
(3.2-1)
22. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.2 Управляемые выпрямителиРис. 3.10. Диаграмма
основных величин в
мостовой cхеме с
нагрузкой R—L—E
(выпрямительный
режим)
23. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.2 Управляемые выпрямителиРис. 3.11. Диаграммы
основных величин в
мостовой схеме с
нагрузкой R—L—Е
(инверторный режим)
24. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.3. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫf < fc /2
Рис. 3.12. Преобразователь частоты с непосредственной связью
25. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.3. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫАвтономный инвертор напряжения (АИН):
Рис. 5.16. Преобразователь частоты с явно выраженным звеном
постоянного тока
26. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.3. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫАвтономный инвертор напряжения (АИН):
Рис. 3.14. Автономный инвертор напряжения с нагрузкой R –L
27. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.3. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫАвтономные инверторы тока (АИТ):
Рис.3.15. Автономный инвертор тока
28. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.4. ИМПУЛЬСНЫЕ ПРЕОБРАЗОВАТЕЛИРис. 3.16. Схема и диаграммы
основных величин импульсного
преобразователя
29. 3. ЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
3.4. ИМПУЛЬСНЫЕ ПРЕОБРАЗОВАТЕЛИU ср
En t1
T
Еп
(3.2-2)
T
1
I ср i(t ) dt
T0
(3.2-3)
T
(3.2-4)
1 2
I
i (t ) dt
T0
30. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.1. Характеристики асинхронной машиныU 1л
А
В
R1
I1
С
I
&I 1
X1
I`2
X
E`2
~ Uф
R
X`2
R `2
S
M
`
I& 2
R 2д
R 2д
Рис. 5.1
Рис. 4.1
M
R 2д
Рис. 3.2
R1 – активное сопротивление фазы обмотки статора ;
X1 – индуктивное сопротивление фазы обмотки статора;
R’2 – приведенное активное сопротивление фазы обмотки ротора;
X’2 – приведенное индуктивное сопротивление фазы обмотки ротора;
R’д2 - добавочное приведенное активное сопротивление обмотки ротора;
R2 R2 R2д приведенное суммарное активное сопротивление цепи
фазы ротора;
X1 X 2 X к – индуктивное фазное сопротивление короткого замыкания;
31. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.1. Характеристики асинхронной машиныСкольжение асинхронного двигателя:
S
0
2 f1
pn
0
0
(5.1-1)
- угловая скорость вращающегося магнитного поля
(синхронная скорость),
где: f1 - частота питающего напряжения;
pn - количество пар полюсов.
0 (1 S )
- угловая скорость вращения ротора АД.
(5.1-2)
Уравнение электромеханической характеристики АД:
I 2
Uф
2
R
R1 2 X 1 X 2
S
2
Uф
2
R
R1 2 X k2
S
(5.1-3)
32. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.1. Характеристики асинхронной машиныТок обмотки фазы статора АД:
I1 I 2 I
S
S1
0
(5.1-4)
1
0
I1
I`2
1 0
I 0 I
I кз
I
Рис. 3.3
I max I` ; I1
2
33. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.1. Характеристики асинхронной машиныУравнение механической характеристики АД:
M
3 U ф2 R2
R
0 S R1 2
S
2
2
Xк
(5.1-5)
Момент критический (max):
Mк
3 U ф2
2 0 R1 R X
2
1
2
к
(5.1-6)
Скольжение критическое:
Sк
R2
R X
2
1
2
к
(5.1-7)
34. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.1. Характеристики асинхронной машиныУравнение механической характеристики АД (Уравнение Клосса):
R
2M к 1 1 Sк
R2
M
S S к 2 R1
Sк
Sк S R2
(5.1-8)
Как правило R1 мало и формулы для расчета упрощаются:
M
2M к
S Sк
Sк S
(5.1-9)
M к 3U ф2 /( 2 0 X к )
(5.1-10)
R
Sк 2
Xк
(5.1-11)
35. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.1. Характеристики асинхронной машиныS ω
-
+
Sk ген
w0
0
Sk дв
- M1
1
0
M
- M к ген
M
кз
-
+
S
ω
Рис. 5.4.
M к дв
36. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.1. Характеристики асинхронной машиныАД может работать в следующих режимах:
1.
2.
3.
4.
5.
6.
Режим холостого хода: S=0; ω = ω0.
Режим короткого замыкания (пусковой режим): S=1; ω = 0.
Двигательный режим: 0<S<1; 0< ω< ω0;
Генераторный (рекуперативный) режим: S < 0; ω > ω0.
Генераторный (противовключение) режим S > 1; ω < 0
Генераторный (независимо от сети) режим, который
называется режимом динамического торможения. В этом
режиме обмотка статора АД отключается от сети
трехфазного переменного тока и две фазы обмотки статора
подключаются к источнику постоянного тока.
2
Sк Sн м м 1
(5.1-12)
M M к / M н
(5.1-13)
37. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.1. Характеристики асинхронной машиныПорядок расчета механической характеристики АД по заданным каталожным данным:
Pн , n н , м ,
1. Определяются угловые скорости поля статора
0
2 f1
pn
(5.1-14)
2. Определяется номинальный момент АД:
3. Скольжение АД в номинальном режиме:
f1,
pn
0 и ротора номинальном режиме н:
2 nн
н
(5.1-15)
60
Mн
Sн
Pн
н
0 н
н
(5.1-16)
(5.1-17)
38. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.1. Характеристики асинхронной машиныM к м М н
4. Момент критический:
(5.1-18)
2
Sк Sн м м 1
5. Скольжение критическое:
6. Механическая характеристика:
M
(5.1-19)
2M к
S Sк
Sк S
(5.1-20)
S
0
Sн
S к
1
Mн
M к .з .
Рис. 5.6
Mк
M
39. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.2. Регулирование скорости, тока и момента АДс помощью резисторов в цепях ротора
3U ф ( R2 R2 д )
2
M
~
R2 R2 д
2
Xк
0 S R1
S
S
0
0
R 2д 2 R 2д 1 0
а
b
R 2д 0
c
M
Sк.ест
R 2д
d
R 2д1
S к.иск
1 0
Рис.
Рис.5.7
3.6
(5.1-21)
2
R 2д 2
e
M н M п M п1
Рис.
Рис. 5.8
3.7
M к М п2
40. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.2. Регулирование скорости, тока и момента АДс помощью резисторов в цепях ротора
~
S
0
0
а
b
Mк
R 2д 0
2
2 0 R1 R12 X к
(5.1-22)
c
M
Sк.ест
R 2д
d
R 2д1
S к.иск
1 0
Рис. 3.6
R 2д 2 R 2д 1 0
3U ф
Sк
R 2д 2
e
M н M п M п1
M к М п2
R2 R2 д
R1 X к
2
(5.1-23)
2
Рис. 3.7
3U ф ( R2 R2 д )
2
M п М к.з
S
R2 д Rр к.иск 1
Sк.ест
(5.1-24)
E2к Sн
3 I 2н
(5.1-26)
0 ( R1 R2 R2 д ) 2 Х к 2
(5.1-25)
Rр
.
41. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.2. Регулирование скорости, тока и момента АДс помощью резисторов в цепях ротора
R2д1 R2 ном
R2д 2 R2 ном
Rр R2 ном
R2ном
E2k
bc
,
ae
bd
,
ae
ab
,
ae
E2k
3 I 2н
(5.1-27)
(5.1-28)
(5.1-29)
(5.1-30)
- ЭДС ротора при S = 1
S
R2 ди Rр иск 1
Sест
(5.1-31)
42. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.3. Регулирование координат АД резисторами в цепи статораS
0
R1д
R1д
R1д
0
R 1д1
R 1д 2
R 1д 0
S к.ест
M
M п2
1 0
M п1
M к2
Рис. 5.9
Рис.
3.8
М
Mп
M к1
Рис.
Рис. 5.10
3.9
M к .ест
43. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.3. Регулирование координат АД резисторами в цепи статора01
S
N
2 f1
pп1
N
S
02
N
S
N
2 f 2
pп 2
N
S
2н
1к
1н
2к
I
1н
а
2к
1к
2н
I
б
Рис. 5.11
Рис. 3.10
2н
1н
I
в
2к
44. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.2. Регулирование скорости, тока и момента АД
с помощью резисторов в цепях ротора
3U ф ( R2 R2 д )
2
M
~
R2 R2 д
2
Xк
0 S R1
S
S
0
0
R 2д 2 R 2д 1 0
а
b
R 2д 0
c
M
Sк.ест
R 2д
d
R 2д1
S к.иск
1 0
Рис.
Рис.5.7
3.6
(5.1-21)
2
R 2д 2
e
M н M п M п1
Рис.
Рис. 5.8
3.7
M к М п2
45. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.2. Регулирование скорости, тока и момента АД
с помощью резисторов в цепях ротора
~
S
0
0
а
b
Mк
R 2д 0
2
2 0 R1 R12 X к
(5.1-22)
c
M
Sк.ест
R 2д
d
R 2д1
S к.иск
1 0
Рис. 3.6
R 2д 2 R 2д 1 0
3U ф
Sк
R 2д 2
e
M н M п M п1
M к М п2
R2 R2 д
R1 X к
2
(5.1-23)
2
Рис. 3.7
3U ф ( R2 R2 д )
2
M п М к.з
S
R2 д Rр к.иск 1
Sк.ест
(5.1-24)
E2к Sн
3 I 2н
(5.1-26)
0 ( R1 R2 R2 д ) 2 Х к 2
(5.1-25)
Rр
.
46. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.2. Регулирование скорости, тока и момента АД
с помощью резисторов в цепях ротора
R2д1 R2 ном
R2д 2 R2 ном
Rр R2 ном
R2ном
E2k
bc
,
ae
bd
,
ae
ab
,
ae
E2k
3 I 2н
(5.1-27)
(5.1-28)
(5.1-29)
(5.1-30)
- ЭДС ротора при S = 1
S
R2 ди Rр иск 1
Sест
(5.1-31)
47. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.3. Регулирование координат АД резисторами в цепи статора
S
0
R1д
R1д
R1д
0
R 1д1
R 1д 2
R 1д 0
S к.ест
M
M п2
1 0
M п1
M к2
Рис. 5.9
Рис.
3.8
М
Mп
M к1
Рис.
Рис. 5.10
3.9
M к .ест
48. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.4. Регулирование скорости АД изменением числа пар полюсов
01
S
N
2 f1
pп1
N
S
02
N
S
N
2 f 2
pп 2
N
S
2н
1к
1н
2к
I
1н
а
2к
1к
2н
I
б
Рис. 5.11
Рис. 3.10
2н
1н
I
в
2к
49. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.4. Регулирование скорости АД изменением числа пар полюсов
01
2 f1
pп1
02
~
~
~
A
U1 f1
A
1н
2к
1к
2н
B
2к
1к
2н
2н
1к
2к
1н
C
B
C
1н
2 f 2
pп 2
1н
1к
2н
2к
P=1
P=2
01 0
Рис.5.12
02 2 0
50. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.4. Регулирование скорости АД изменением числа пар полюсов
~
~
~
A
U1 f1
A
C
1н
2к
1к
2н
B
2к
1к
2н
2н
1к
2к
1н
2н
P1 3U1н I1н Cos 1
(5.1-32)
3U1’
2 I1н Cos 1н 3,46U1н I1н Cos 1
3
(5.1-33)
P1 /
1н
1к
C
B
1н
2к
При этом при увеличении 0 в два раза, критический
и пусковой моменты уменьшаются в 2 раза.
02
01
P2
P1 2 P2
М
Рис. 3.12
Регулирование при постоянной
мощности
51. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.4. Регулирование скорости АД изменением числа пар полюсов
A
C
B
1
н
1
н
12
к н
1
к
2
н
2
2
к 2к
к
0
2
0
1
2
1
н
к
При переключении со звезды на
двойную звезду скорость и
потребляемая мощность
увеличивается в 2 раза.
P2
P1 2P2
М
1
н
Регулирование осуществляется
при постоянном моменте.
Рис. 5.14
(5.1-33)
52. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.5 Регулирование координат электропривода в системе
преобразователь напряжения – двигатель
3U1ф R2
2
M
Преобразователь
напряжения
R
0 S R1 2
S
2
2
Xk
(5.1-34)
Uрег
Mк
М
R 2д
Рис. 5.16
Рис. 3.15
Sк
3U ф
2
2 0 ( R1 R1 X к )
2
R2
R12 X к 2
2
(5.1-35)
(5.1-36)
53. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.5 Регулирование координат электропривода в системе
преобразователь напряжения – двигатель
Преобразователь
напряжения
S
0
Uрег
Sк
Uн
0,4Uн
0,6U н 0,8U н
М
R 2д
Мс
Рис. 5.16
Рис. 3.15
Рис. 5.17
М
54.
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.5 Регулирование координат электропривода в системе
преобразователь напряжения – двигатель
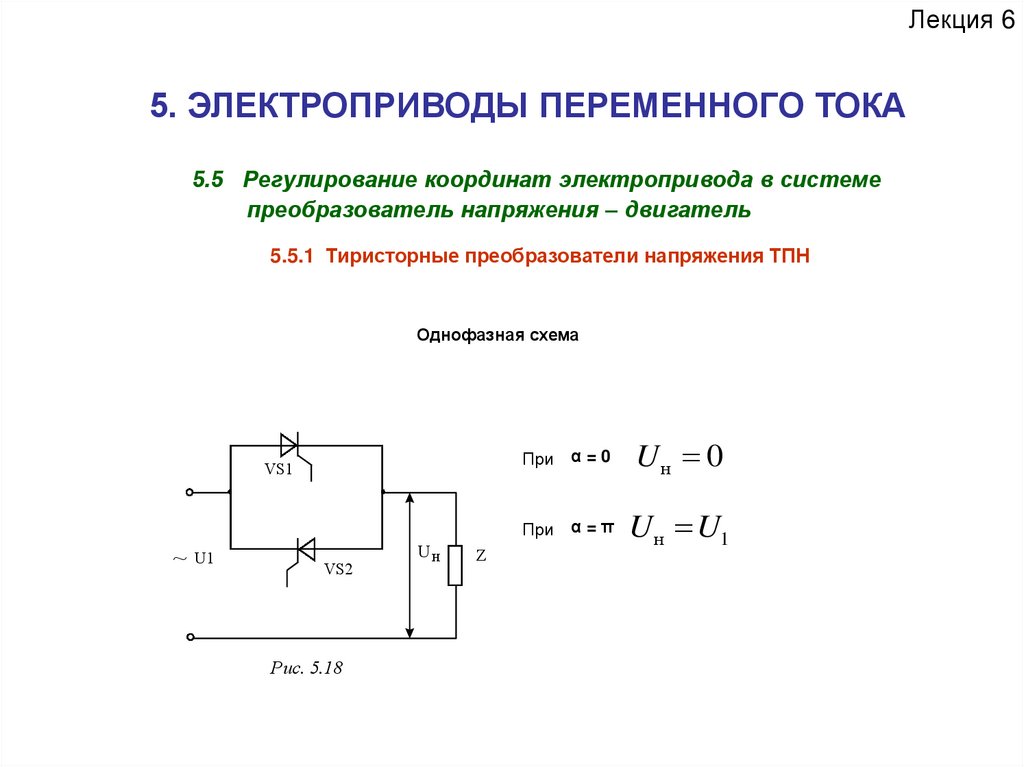
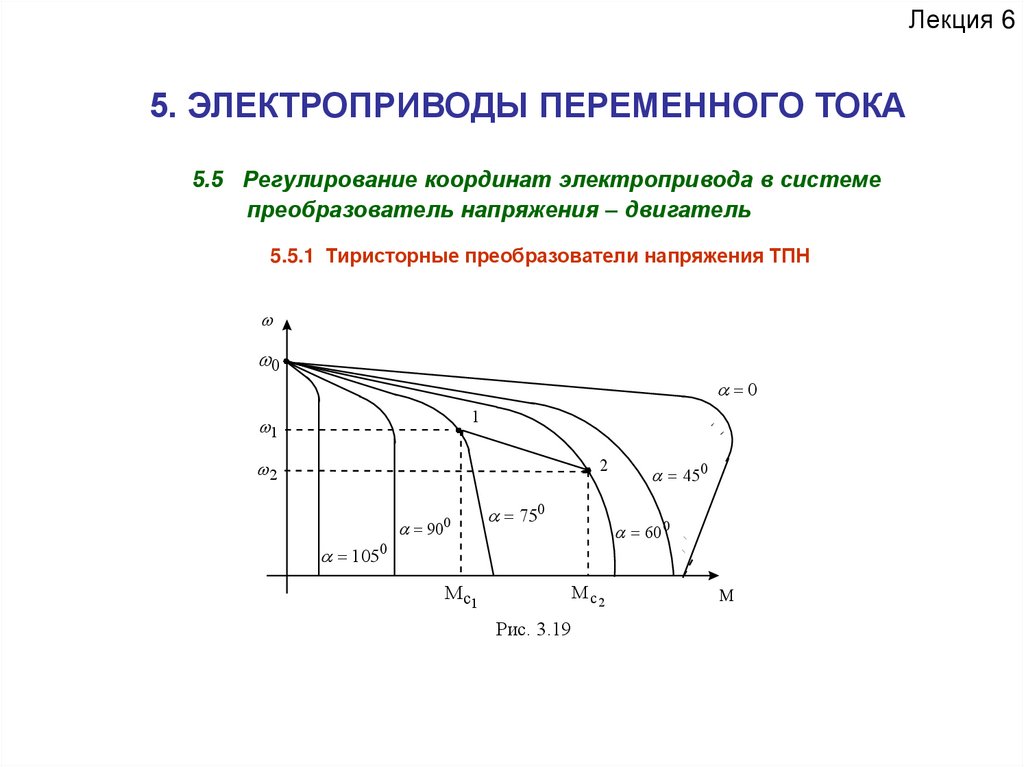
5.5.1 Тиристорные преобразователи напряжения ТПН
Однофазная схема
VS1
~
U1
VS2
Рис.5.18
3.17
Рис.
Uн
Z
При α = 0
Uн 0
При α = π
U н U1
55.
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.5 Регулирование координат электропривода в системе
преобразователь напряжения – двигатель
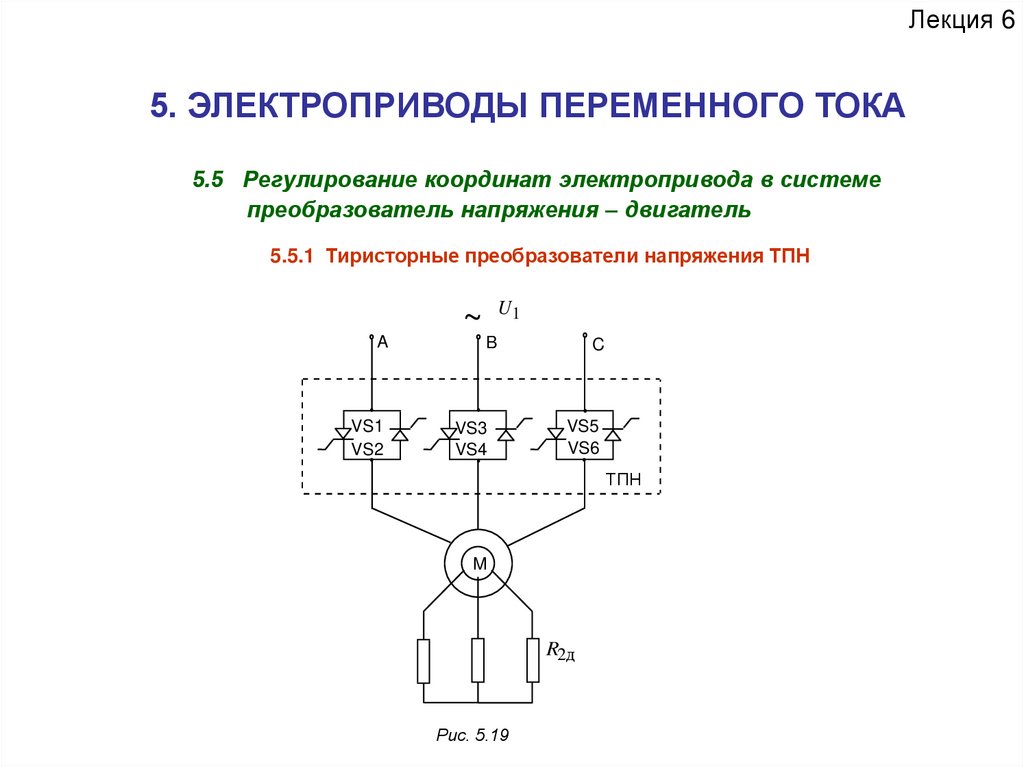
5.5.1 Тиристорные преобразователи напряжения ТПН
A
VS1
VS2
U1
~
B
VS3
VS4
C
VS5
VS6
ТПН
M
R2д
Рис. 5.19
56.
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.5 Регулирование координат электропривода в системе
преобразователь напряжения – двигатель
5.5.1 Тиристорные преобразователи напряжения ТПН
0
0
1
1
2
2
900
750
60 0
1050
M c1
Mc2
Рис. 3.19
45 0
М
57.
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.5 Регулирование координат электропривода в системе
преобразователь напряжения – двигатель
5.5.1 Тиристорные преобразователи напряжения ТПН
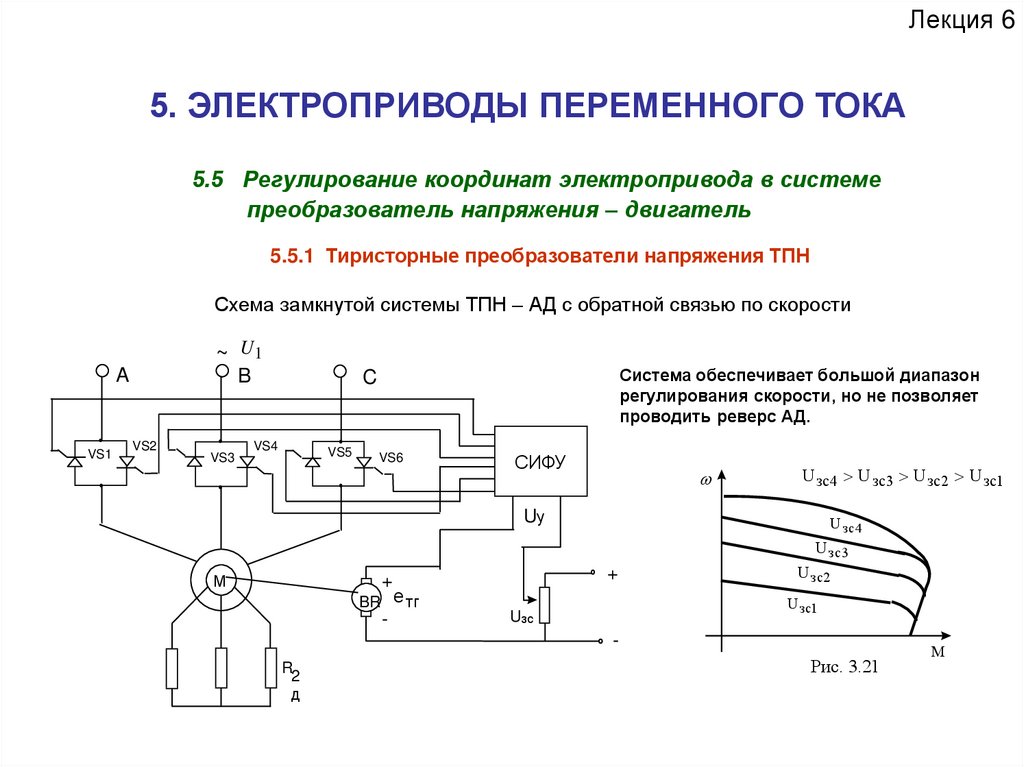
Схема замкнутой системы ТПН – АД с обратной связью по скорости
~ U1
A
VS1
B
VS2
VS3
Система обеспечивает большой диапазон
регулирования скорости, но не позволяет
проводить реверс АД.
C
VS4
VS5
VS6
CИФУ
U зс4 U зс 3 U зс 2 U зс1
Uу
U зс4
U зс3
М
+
+
BR е тг
-
U зс2
U зс1
Uзс
R2
д
Рис. 3.21
М
58.
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.5 Регулирование координат электропривода в системе
преобразователь напряжения – двигатель
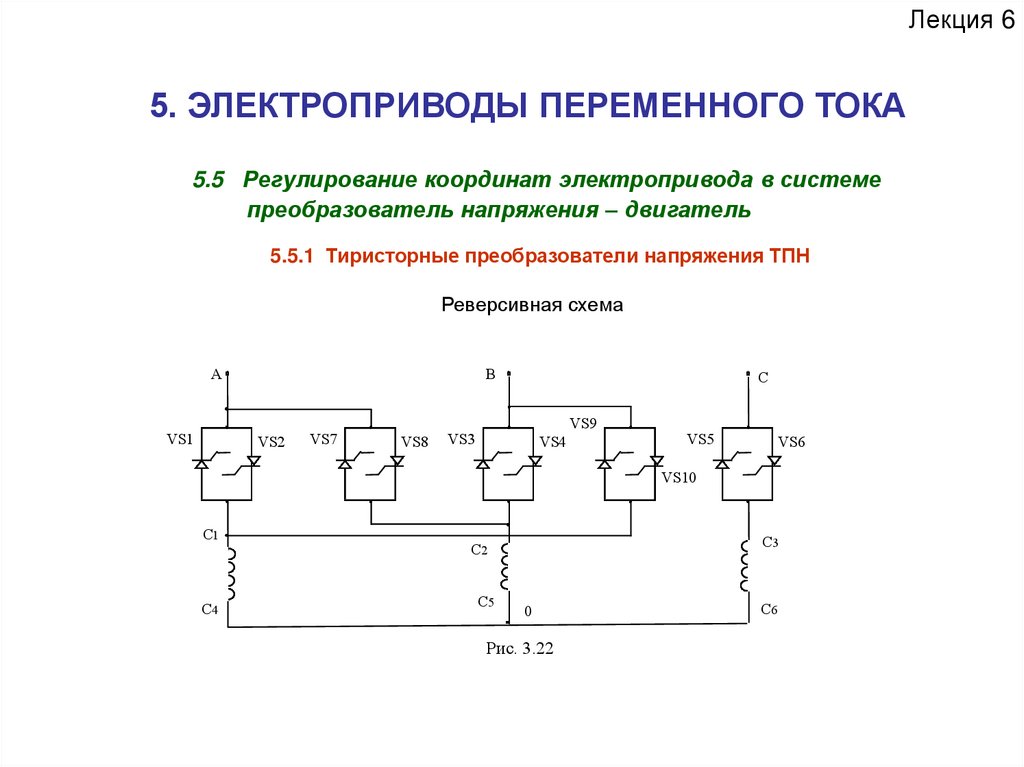
5.5.1 Тиристорные преобразователи напряжения ТПН
Реверсивная схема
A
VS1
B
VS2
VS7
VS8
C
VS9
VS3
VS4
VS5
VS6
VS10
C1
C4
C3
C2
C5
0
Рис. 3.22
C6
59.
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.5 Регулирование координат электропривода в системе
преобразователь напряжения – двигатель
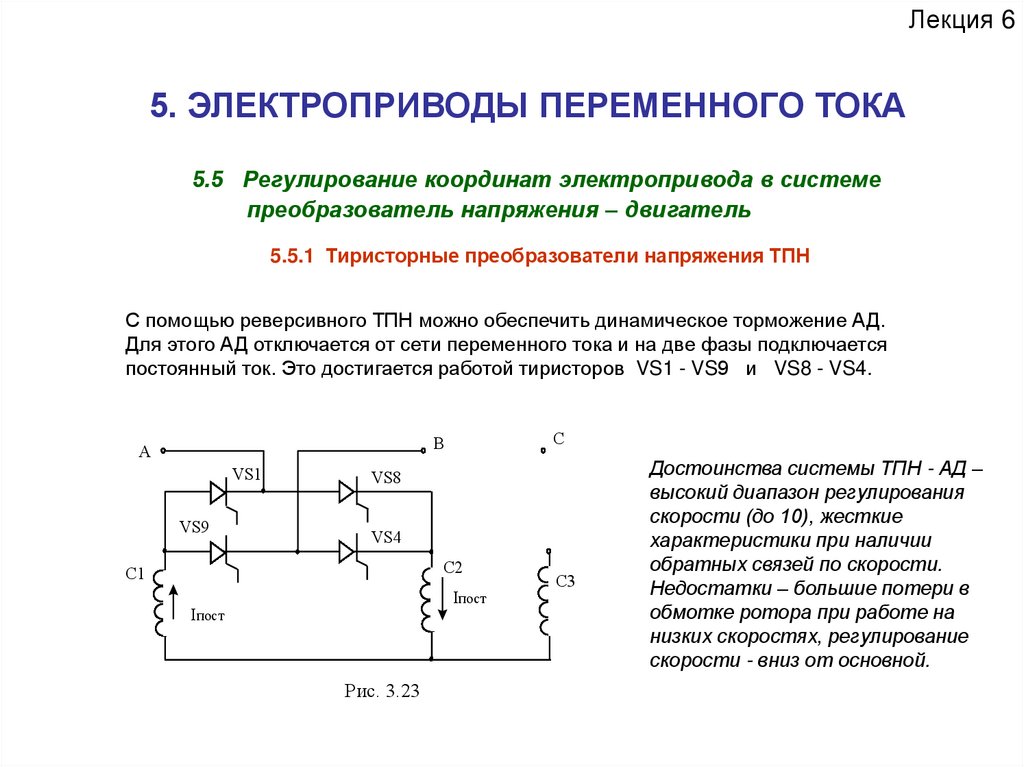
5.5.1 Тиристорные преобразователи напряжения ТПН
С помощью реверсивного ТПН можно обеспечить динамическое торможение АД.
Для этого АД отключается от сети переменного тока и на две фазы подключается
постоянный ток. Это достигается работой тиристоров VS1 - VS9 и VS8 - VS4.
С
B
A
VS1
VS9
VS8
VS4
С2
С1
Iпост
Iпост
Рис. 3.23
С3
Достоинства системы ТПН - АД –
высокий диапазон регулирования
скорости (до 10), жесткие
характеристики при наличии
обратных связей по скорости.
Недостатки – большие потери в
обмотке ротора при работе на
низких скоростях, регулирование
скорости - вниз от основной.
60.
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.5 Регулирование координат электропривода в системе
преобразователь напряжения – двигатель
5.5.1 Тиристорные преобразователи напряжения ТПН
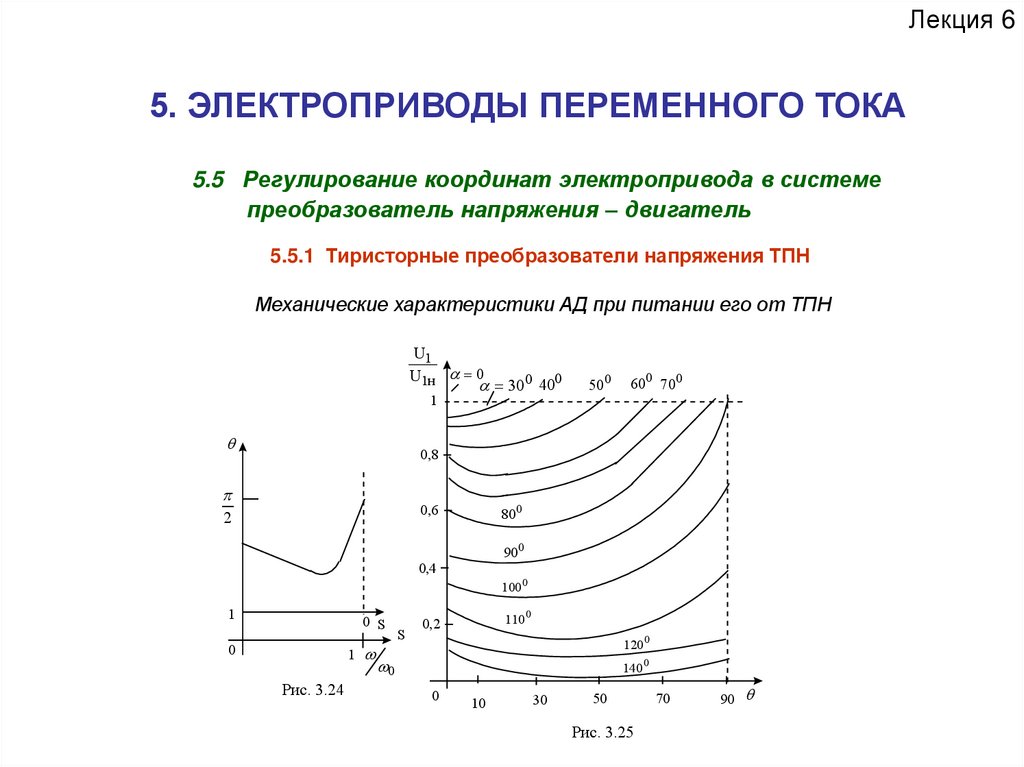
Механические характеристики АД при питании его от ТПН
2
U
M ( S ) 1 M гр ( S )
U1 ном
М гр (S )
U1
(5.1-37)
- момент на граничной характеристике при скольжении S, соответствующий углу управления
тиристоров α = 0.
- 1-я гармоника напряжения.
U1 зависит от угла управления α и угла нагрузки :
arctg
X дв.э , Rдв.э
X дв.э
Rдв.э
- эквивалентные сопротивления фазы статора.
(5.1-38)
61.
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.5 Регулирование координат электропривода в системе
преобразователь напряжения – двигатель
5.5.1 Тиристорные преобразователи напряжения ТПН
Механические характеристики АД при питании его от ТПН
U1
U1н 0
1
30 0 400
50 0
600 700
0,8
0,6
2
80 0
900
0,4
100 0
1
0 S
0
1
Рис. 3.24
S
110 0
0,2
120 0
0
140 0
0
10
30
50
Рис. 3.25
70
90
62.
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6
Регулирование координат электропривода в системе
преобразователь частоты - двигатель (ПЧ-АД)
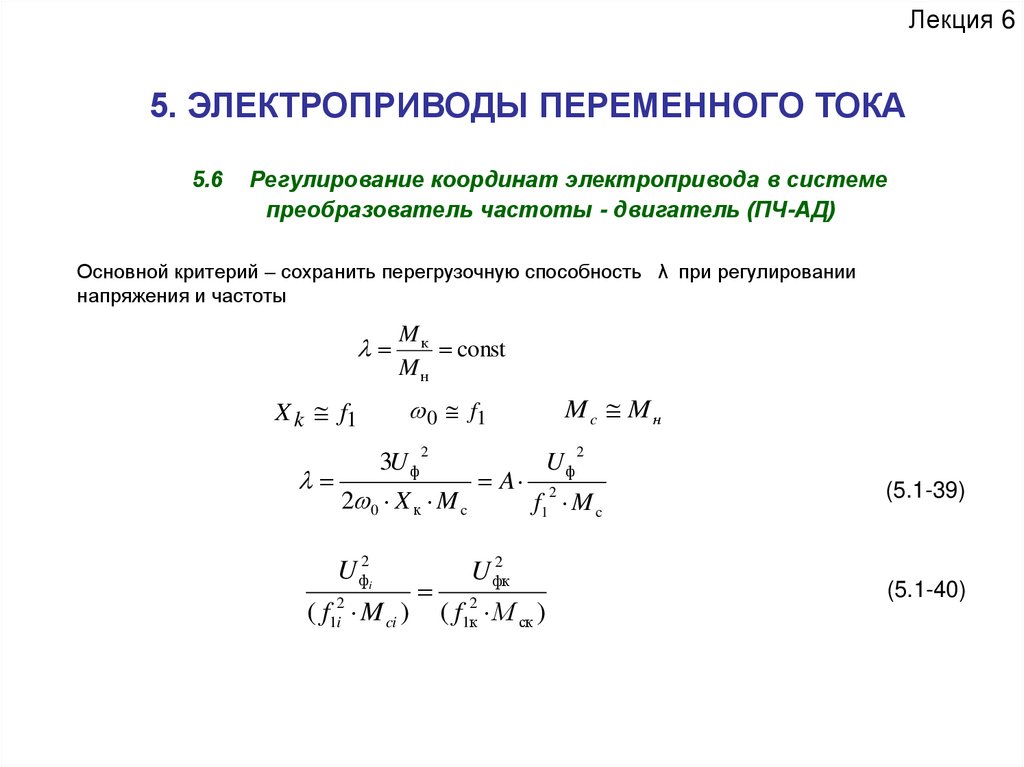
Основной критерий – сохранить перегрузочную способность λ при регулировании
напряжения и частоты
X k f1
Mк
const
Mн
3U ф
2
A
2 0 X к M c
U ф2i
( f M ci )
2
1i
Mc Mн
0 f1
Uф
f1 M c
2
U фк
( f М ск )
2
1к
2
2
(5.1-39)
(5.1-40)
63.
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6
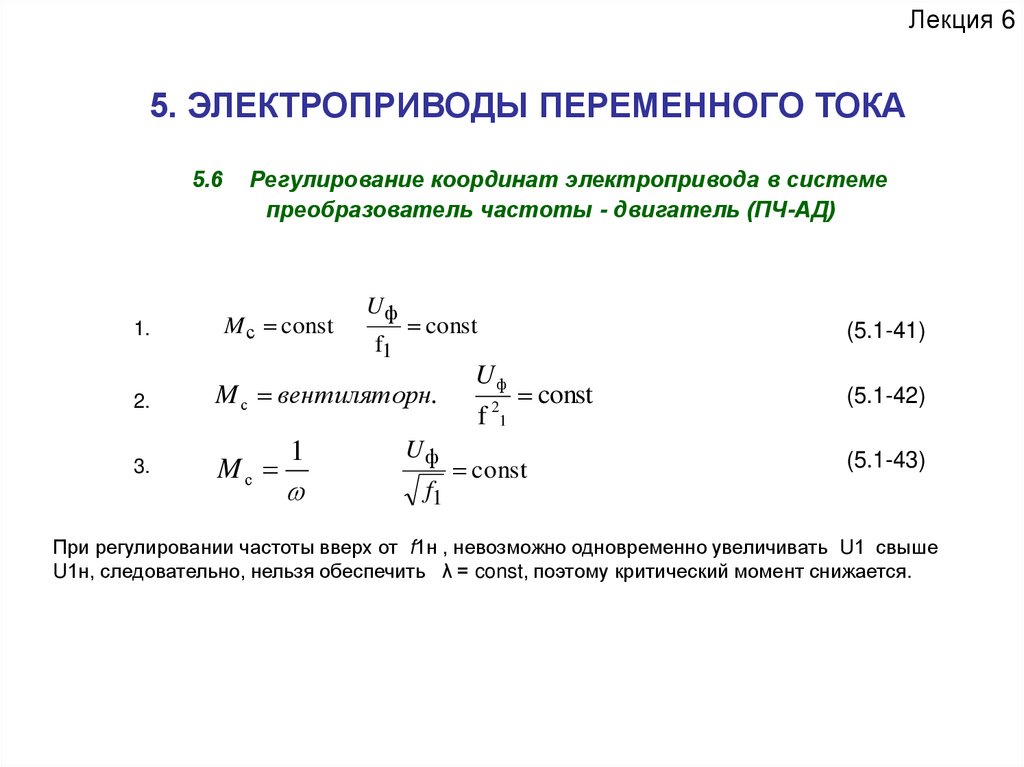
1.
2.
3.
Регулирование координат электропривода в системе
преобразователь частоты - двигатель (ПЧ-АД)
M с const
Uф
f1
const
M с вентиляторн.
Mс
1
Uф
f1
(5.1-41)
Uф
f
2
1
const
const
(5.1-42)
(5.1-43)
При регулировании частоты вверх от f1н , невозможно одновременно увеличивать U1 свыше
U1н, следовательно, нельзя обеспечить λ = const, поэтому критический момент снижается.
64.
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6
Регулирование координат электропривода в системе
преобразователь частоты - двигатель (ПЧ-АД)
При малых f1 сопротивление R1 становится
сравнимым с X 2 f L
U1 U1н ;
1
f var
f15
f14
0e
f11
02
f12
f13
03
Mк
Рис. 5.27
M
f11 f1н
01
U
ф
const
f
1
02
03
1
f1н
0e
fном
01
1
f12
f13
Mk
Рис. 3.26
M
65.
Лекция 65. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6
Регулирование координат электропривода в системе
преобразователь частоты - двигатель (ПЧ-АД)
I
+
-
в.гпт
I
ОВГ
е.дпт
I в.сг
ОВД
ОВСГ
АД
ГПТ
U 1р ег
ДПТ
~
СГ
f 1р ег
АД
АД
АД
66. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6 Регулирование координат электропривода в
системе преобразователь частоты - двигатель (ПЧ-АД)
Преобразователи частоты и напряжения делятся на:
1) электромашинные ( вращающиеся);
2) статические преобразователи.
I
+
-
в.гпт
I е.дпт
ОВГ
I в.сг
ОВД
ОВСГ
АД
ГПТ
U 1ре
ДПТ
~
г
f 1рег
СГ
АД
АД
АД
67. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6 Регулирование координат электропривода в
системе преобразователь частоты - двигатель (ПЧ-АД)
Электромашинные преобразователи частоты:
Основной недостаток данного способа является двойное преобразование энергии:
(переменного тока в постоянный ток, затем в переменный ток регулируемый), что
приводит к большим потерям и обеспечивает низкий КПД системы, громоздкость,
шум и механическую инерционность.
Статические преобразователи делятся на 2 группы:
1. ПЧ без звена постоянного тока с непосредственной связью питающей сети с
нагрузкой.
2. ПЧ с промежуточным звеном постоянного тока (двухзвенные ПЧ).
5.6.1 ПЧ без звена постоянного тока
Блок-схема ПЧ без звена постоянного тока состоит из:
CЧ – силовая часть;
СУ – схема управления.
СЧ состоит из тиристоров и согласующих трансформаторов.
68. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.1 ПЧ без звена постоянного тока
Сигнал
управления
СУ
ПЧ
СЧ
M
U рег
f рег
Рис.
3.28
Рис. 5.30
Электрическая схема ПЧ содержит III группы тиристоров, в каждой группе по 6
тиристоров: три из которых подключены анодами, три - катодами к фазам вторичной
обмотки трансформатора Т. Каждая фаза работает независимо, подключение фазы АД
производится между фазой и нулевым проводом (нулевая схема).
69. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекци 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.1 ПЧ без звена постоянного тока
T
~
U1
f1
Ua
Uв
Uc
VS1 VS2 VS3
VS4 VS5 VS6
U рег
f рег
I
Za
II
III
Zb
Zc
70. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.1 ПЧ без звена постоянного тока
U1
T1
Ua
t5
t1
t2
t3
Ub
Uc
t6
t7
t
t4
a
Uрег
t п
T1/3
T1/2
t
T рег
б
Uрег
t
в
(5.1-21)
71. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.1 ПЧ без звена постоянного токаU1
T1
Ua
t5
t1
t2
t3
Ub
Uc
t6
t7
Если подать в момент t1 импульс на VS1 (в момент
открытия) в t2 на VS2, в t3 на VS3, то на Za
приложено выпрямленное напряжение с пульсациями -U
t
t4
a
Uрег
t п
T1/3
T1/2
t
T рег
б
Uрег
t
в
Если снять импульсы и подать в t5 на VS6, в t6
на VS4, в t7 на VS5
на Za будет приложено
пульсирующее напряжение обратной полярности - U
На нагрузке Zа образуется напряжение переменного тока с
периодом Трег и частотой
f рег
Т рег
Т
T
1 h 1
2
2
3
где h = 0, 1, 2, 3 ....
za
(5.1-45)
1
f1
Т рег
Т рег Т1 (3 2h) / 3
(5.1-44)
(5.1-46)
число открываемых тиристоров в группе за вычетом одного
za
72. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.1 ПЧ без звена постоянного токаU1
T1
Ua
t5
t1
t2
t3
Для трехфазной сети:
Ub
Uc
t6
t7
f рег
t
t4
1
Т рег
3 f1
3 2h
(5.1-47)
a
Uрег
Для m-фазной сети:
t п
T1/3
T1/2
f р ег m1 f1 /( m1 2h)
t
T рег
б
Uрег
(5.1-48)
в
t
h=
2
3
4
5
6
7
8
fРЕГ =
21,4 Гц
16,7
13,6
11,5
10
8,8
7,9 Гц
f рег
t п
m1 f1
m1 2h tп f1
(5.1-49)
- время паузы между включением полярных подгрупп тиристоров
73. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.1 ПЧ без звена постоянного токаU1
T1
Ua
t5
t1
t2
t3
Ub
Uc
t6
t7
Действующее
значение
регулируемого
напряжения зависит от угла управления - α
t
t4
a
Uрег
2m1 U ф sin
t п
T1/3
T1/2
t
T рег
U рег
б
Uрег
t
в
U рег. max 2
m1
sin
m1
m1
cos
(5.1-50)
U ф
(5.1-51)
Недостатки схемы:
1. Наличие нулевого провода;
2. Регулирование частоты вниз от частоты сети.
74. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.2 ПЧ с промежуточным звеном постоянного токаБлок схема:
УВ – управляемый выпрямитель;
УИ – управляемый инвертор;
СУУВ – схема управления УВ;
СУУИ – схема управления УИ.
~
~
~ U1
f1
ПЧ
СУУВ
УВ
+ E0
Uу
-
УИ
СУУИ
МД
~
Рис. 5.33
f р ег
U р ег
75. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.2 ПЧ с промежуточным звеном постоянного тока~
~
~ U1
1
f
СУУВ
УВ
+ E
U у
СУУИ
П
Ч
+
E0
0-
УИ
VS1
VS4
VS3
VS6
УИ
VS5
VS2
-
f р ег
М
U
~ р ег
Д
Рис. 5.33
IA
I
ZA в
I
ZB с
ZC
Рис. 5.34
3.32
Рис.
Продолжительность включения тиристоров:
1
Tрег
2
(5.1-52)
1
3
Tрег
(5.1-53)
76. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.2 ПЧ с промежуточным звеном постоянного токаTрег
1
Tрег 600
6
2
(5.1-54)
В каждый момент открыто три тиристора.
I
+
E0
VS1
A
I
УИ
VS5
VS3
II III IV V V!
I
VS1
II III
VS1
VS4
VS4
t
VS2
VS6
I
-
B
VS3
IA
ZA
Iв
ZB
Iс
VS6
VS6
t
ZC
I
Рис. 3.32
Рис.
5.34
VS3
C
VS5
VS5
VS2
VS2
Рис. 5.35
3.33
Рис.
t
77. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.2 ПЧ с промежуточным звеном постоянного тока
I
A
I
II III IV V V!
I
VS1
II III
VS1
VS4
I
t
VS3
VS3
VS6
I
Фазные токи, протекающие через Zа, Zв, Zс , представлены
на диаграмме рис. 5.35. На интервалах I, II, III токи проходят
через сопротивления Zа, Zв, Zс, как это показано на рис. 5.36,
и создают падения напряжения E0/3 или 2E0/3.
B
VS6
t
C
VS5
VS5
VS2
VS2
t
Рис. 3.33
ZA
Рис. 5.35
ZВ
ZВ
IA
0
Ic ZC
E0 / 3
+
ZA
IВ
2E 0 / 3
E0
На интервале I
0
IA
Ic
+
IA
ZC
E0
На интервале II
Рис.5.36
3.34
Рис.
IВ
IВ
E0 / 3
2E 0 / 3
-
ZA
-
ZC
ZВ
E0 / 3
+
Ic
2E 0 / 3
E0
На интервале III
-
78. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.2 ПЧ с промежуточным звеном постоянного тока
2E0 / 3
UA
IA
I
II
III IV
V VI VII
VS1
E0 / 3
Tрег
IX
VS1
t
VIII
t
VS4
IB
UB
VS3
t
UC
VS6
VS5
VS2
VS2
Tрег
Рис. 3.34
Рис.Рис.
5.373.35
t
VS6
IC
t
VS3
Рис. 3.34
Рис. 3.36
Рис. 5.38
t
79. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.2 ПЧ с промежуточным звеном постоянного тока
Tрег
(5.1-55)
3
В каждый момент открыто два тиристора.
UA
E0 / 2
t
UB
t
UC
t
Tрег
Рис.
Рис.3.36
5.39
Рис.
3.37
80. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.3 ПЧ с промежуточным звеном постоянного тока и АИН
L0
VS3
VS1
VS10
VS12
VD7
VS8
VD9
VD11
U1
VD3
VD1
~
E
F1
0
M
~
L
VS9
VS11
VD5
C0
VD4
VS7
VS5
VD8
VD10
VD6
VD2
C
VD12
VS2
VS4
VS6
Рис. 5.40
На выходе установлен конденсатор большой емкости, тогда АИН имеет жесткую
внешнюю характеристику, т.е. с изменением тока нагрузки напряжение не
изменяется. При использовании АИН управляющими воздействиями на АД является
частота и напряжение.
Для получения жестких статических и динамических характеристик электропривода с
АИН применяются обратные связи по скорости, магнитному потоку или их
сочетание.
81. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.4 ПЧ с промежуточным звеном постоянного тока и АИТ
L
VS1
VS11
АИТ
УВ
~
VS9
VS7
VS5
VS3
VD1
VD2
ДС
VD3
M
U 1, f 1
~
VD5
VD4
VS4
С
VS2
VS6
VS10
1442443
ДТ
VS8
VS1
2
144
42444
3
СУВ
U
VD6
СУИ
U s
+
Uт
Р
Т
ФП
Рис.
5.41
U
+
Ub
УО
U з. .
с
82. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.4 ПЧ с промежуточным звеном постоянного тока и АИТ
СУВ – схема управления тиристороами УВ;
СУИ – схема управления тиристорами АИТ;
РТ – регулятор тока статора;
ДТ – датчик тока статора;
ДС – датчик скорости;
УО – усилитель-ограничитель;
ФП – функциональный преобразователь.
U З.С.
– задающий сигнал: определяет частоту переключения тиристоров АИТ VS7 - VS12 и
частоту тока статора АД.
U b U з.с U
b
f2
f1 ном
- напряжение, пропорциональное относительной частоте ротора β.
(5.1-56)
b
f1
f1 ном
S
(5.1-57)
83. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.4 ПЧ с промежуточным звеном постоянного тока и АИТ
При перегрузке или резких изменениях U з.с
УО входит в зону ограничения
выходного сигнала U b = const, ограничивая ток. Двигатель работает при любой
скорости в этом режиме при постоянных значениях тока и абсолютного скольжения, то
есть механическая характеристика становится абсолютно мягкой
0
Uз.с1
U з .с 2 U з .с 1
U з.с 3 U з.с 2
U з.с 0
0
U з.с 4
U з.с 5
Рис.
Рис.5.42
3.40
M
84. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.4 ПЧ с промежуточным звеном постоянного тока и АИТ
В ПЧ со звеном постоянного тока используются инверторы с широтно-импульсной
модуляцией (ШИМ), которые позволяют широкое регулирование напряжения и
частоты и обеспечивают выходной ток синусоидальной формы. При использовании
инверторов с ШИМ в схеме ПЧ может быть применен неуправляемый выпрямитель.
В этих ПЧ используются также широтно-импульсные регуляторы напряжения (ШИР),
которые устанавливаются между источником постоянного тока и инвертором.
L1
VS1
+
E0
-
+
VD
L2
С
VS2
Uн
Рис.5.43
3.41
Рис.
VS1 - основной тиристор,
VS2 - вспомогательный тиристор;
L1 - ограничивающий реактор;
L2-С - коммутирующий контур.
85. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.4 ПЧ с промежуточным звеном постоянного тока
В ПЧ со звеном постоянного тока используются инверторы с широтно-импульсной
модуляцией (ШИМ), которые позволяют широкое регулирование напряжения и
частоты и обеспечивают выходной ток синусоидальной формы. При использовании
инверторов с ШИМ в схеме ПЧ может быть применен неуправляемый выпрямитель.
В этих ПЧ используются также широтно-импульсные регуляторы напряжения (ШИР),
которые устанавливаются между источником постоянного тока и инвертором.
L1
VS1
+
E0
-
+
VD
L2
С
Рис. 5.43
Рис. 3.41
VS2
Uн
-
VS1 - основной тиристор,
VS2 - вспомогательный тиристор;
L1 - ограничивающий реактор;
L2-С - коммутирующий контур.
86. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6 Регулирование координат электропривода в
системе преобразователь частоты - двигатель (ПЧ-АД)
Преобразователи частоты и напряжения делятся на:
1) электромашинные ( вращающиеся);
2) статические преобразователи.
I
+
-
в.гпт
I е.дпт
ОВГ
I в.сг
ОВД
ОВСГ
АД
ГПТ
U 1ре
ДПТ
~
г
f 1рег
СГ
АД
АД
АД
87. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6 Регулирование координат электропривода в
системе преобразователь частоты - двигатель (ПЧ-АД)
Электромашинные преобразователи частоты:
Основной недостаток данного способа является двойное преобразование энергии:
(переменного тока в постоянный ток, затем в переменный ток регулируемый), что
приводит к большим потерям и обеспечивает низкий КПД системы, громоздкость,
шум и механическую инерционность.
Статические преобразователи делятся на 2 группы:
1. ПЧ без звена постоянного тока с непосредственной связью питающей сети с
нагрузкой.
2. ПЧ с промежуточным звеном постоянного тока (двухзвенные ПЧ).
5.6.1 ПЧ без звена постоянного тока
Блок-схема ПЧ без звена постоянного тока состоит из:
CЧ – силовая часть;
СУ – схема управления.
СЧ состоит из тиристоров и согласующих трансформаторов.
88. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.1 ПЧ без звена постоянного тока
Сигнал
управления
СУ
ПЧ
СЧ
M
U рег
f рег
Рис.
3.28
Рис. 5.30
Электрическая схема ПЧ содержит III группы тиристоров, в каждой группе по 6
тиристоров: три из которых подключены анодами, три - катодами к фазам вторичной
обмотки трансформатора Т. Каждая фаза работает независимо, подключение фазы АД
производится между фазой и нулевым проводом (нулевая схема).
89. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.1 ПЧ без звена постоянного тока
T
~
U1
f1
Ua
Uв
Uc
VS1 VS2 VS3
VS4 VS5 VS6
U рег
f рег
I
Za
II
III
Zb
Zc
90. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.1 ПЧ без звена постоянного тока
U1
T1
Ua
t5
t1
t2
t3
Ub
Uc
t6
t7
t
t4
a
Uрег
t п
T1/3
T1/2
t
T рег
б
Uрег
t
в
(5.1-21)
91. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.1 ПЧ без звена постоянного тока
U1
T1
Ua
t5
t1
t2
t3
Ub
Uc
t6
t7
Если подать в момент t1 импульс на VS1 (в момент
открытия) в t2 на VS2, в t3 на VS3, то на Za
приложено выпрямленное напряжение с пульсациями -U
t
t4
a
Uрег
t п
T1/3
T1/2
t
T рег
б
Uрег
t
в
Если снять импульсы и подать в t5 на VS6, в t6
на VS4, в t7 на VS5
на Za будет приложено
пульсирующее напряжение обратной полярности - U
На нагрузке Zа образуется напряжение переменного тока с
периодом Трег и частотой
f рег
Т рег
Т
T
1 h 1
2
2
3
где h = 0, 1, 2, 3 ....
za
(5.1-45)
1
f1
Т рег
Т рег Т1 (3 2h) / 3
(5.1-44)
(5.1-46)
число открываемых тиристоров в группе за вычетом одного
za
92. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.1 ПЧ без звена постоянного тока
U1
T1
Ua
t5
t1
t2
t3
Для трехфазной сети:
Ub
Uc
t6
t7
f рег
t
t4
1
Т рег
3 f1
3 2h
(5.1-47)
a
Uрег
Для m-фазной сети:
t п
T1/3
T1/2
f р ег m1 f1 /( m1 2h)
t
T рег
б
Uрег
(5.1-48)
в
t
h=
2
3
4
5
6
7
8
fРЕГ =
21,4 Гц
16,7
13,6
11,5
10
8,8
7,9 Гц
f рег
t п
m1 f1
m1 2h tп f1
(5.1-49)
- время паузы между включением полярных подгрупп тиристоров
93. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.1 ПЧ без звена постоянного тока
U1
T1
Ua
t5
t1
t2
t3
Ub
Uc
t6
t7
Действующее
значение
регулируемого
напряжения зависит от угла управления - α
t
t4
a
Uрег
2m1 U ф sin
t п
T1/3
T1/2
t
T рег
U рег
б
Uрег
t
в
U рег. max 2
m1
sin
m1
m1
cos
(5.1-50)
U ф
(5.1-51)
Недостатки схемы:
1. Наличие нулевого провода;
2. Регулирование частоты вниз от частоты сети.
94. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.2 ПЧ с промежуточным звеном постоянного тока
Блок схема:
УВ – управляемый выпрямитель;
УИ – управляемый инвертор;
СУУВ – схема управления УВ;
СУУИ – схема управления УИ.
~
~
~ U1
f1
ПЧ
СУУВ
УВ
+ E0
Uу
-
УИ
СУУИ
МД
~
Рис. 5.33
f р ег
U р ег
95. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.2 ПЧ с промежуточным звеном постоянного тока
~
~
~ U1
1
f
СУУВ
УВ
+ E
U у
СУУИ
П
Ч
+
E0
0-
УИ
VS1
VS4
VS3
VS6
УИ
VS5
VS2
-
f р ег
М
U
~ р ег
Д
Рис. 5.33
IA
I
ZA в
I
ZB с
ZC
Рис. 5.34
3.32
Рис.
Продолжительность включения тиристоров:
1
Tрег
2
(5.1-52)
1
3
Tрег
(5.1-53)
96. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.2 ПЧ с промежуточным звеном постоянного тока
Tрег
1
Tрег 600
6
2
(5.1-54)
В каждый момент открыто три тиристора.
I
+
E0
VS1
A
I
УИ
VS5
VS3
II III IV V V!
I
VS1
II III
VS1
VS4
VS4
t
VS2
VS6
I
-
B
VS3
IA
ZA
Iв
ZB
Iс
VS6
VS6
t
ZC
I
Рис. 3.32
Рис.
5.34
VS3
C
VS5
VS5
VS2
VS2
Рис. 5.35
3.33
Рис.
t
97. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.2 ПЧ с промежуточным звеном постоянного тока
I
A
I
II III IV V V!
I
VS1
II III
VS1
VS4
I
t
VS3
VS3
VS6
I
Фазные токи, протекающие через Zа, Zв, Zс , представлены
на диаграмме рис. 5.35. На интервалах I, II, III токи проходят
через сопротивления Zа, Zв, Zс, как это показано на рис. 5.36,
и создают падения напряжения E0/3 или 2E0/3.
B
VS6
t
C
VS5
VS5
VS2
VS2
t
Рис. 3.33
ZA
Рис. 5.35
ZВ
ZВ
IA
0
Ic ZC
E0 / 3
+
ZA
IВ
2E 0 / 3
E0
На интервале I
0
IA
Ic
+
IA
ZC
E0
На интервале II
Рис.5.36
3.34
Рис.
IВ
IВ
E0 / 3
2E 0 / 3
-
ZA
-
ZC
ZВ
E0 / 3
+
Ic
2E 0 / 3
E0
На интервале III
-
98. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.2 ПЧ с промежуточным звеном постоянного тока
2E0 / 3
UA
IA
I
II
III IV
V VI VII
VS1
E0 / 3
Tрег
IX
VS1
t
VIII
t
VS4
IB
UB
VS3
t
UC
VS6
VS5
VS2
VS2
Tрег
Рис. 3.34
Рис.Рис.
5.373.35
t
VS6
IC
t
VS3
Рис. 3.34
Рис. 3.36
Рис. 5.38
t
99. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.2 ПЧ с промежуточным звеном постоянного тока
Tрег
(5.1-55)
3
В каждый момент открыто два тиристора.
UA
E0 / 2
t
UB
t
UC
t
Tрег
Рис.
Рис.3.36
5.39
Рис.
3.37
100. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.3 ПЧ с промежуточным звеном постоянного тока и АИН
L0
VS3
VS1
VS10
VS12
VD7
VS8
VD9
VD11
U1
VD3
VD1
~
E
F1
0
M
~
L
VS9
VS11
VD5
C0
VD4
VS7
VS5
VD8
VD10
VD6
VD2
C
VD12
VS2
VS4
VS6
Рис. 5.40
На выходе установлен конденсатор большой емкости, тогда АИН имеет жесткую
внешнюю характеристику, т.е. с изменением тока нагрузки напряжение не
изменяется. При использовании АИН управляющими воздействиями на АД является
частота и напряжение.
Для получения жестких статических и динамических характеристик электропривода с
АИН применяются обратные связи по скорости, магнитному потоку или их
сочетание.
101. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.4 ПЧ с промежуточным звеном постоянного тока и АИТ
L
VS1
VS11
АИТ
УВ
~
VS9
VS7
VS5
VS3
VD1
VD2
ДС
VD3
M
U 1, f 1
~
VD5
VD4
VS4
С
VS2
VS6
VS10
1442443
ДТ
VS8
VS1
2
144
42444
3
СУВ
U
VD6
СУИ
U s
+
Uт
Р
Т
ФП
Рис.
5.41
U
+
Ub
УО
U з. .
с
102. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.4 ПЧ с промежуточным звеном постоянного тока и АИТ
СУВ – схема управления тиристороами УВ;
СУИ – схема управления тиристорами АИТ;
РТ – регулятор тока статора;
ДТ – датчик тока статора;
ДС – датчик скорости;
УО – усилитель-ограничитель;
ФП – функциональный преобразователь.
U З.С.
– задающий сигнал: определяет частоту переключения тиристоров АИТ VS7 - VS12 и
частоту тока статора АД.
U b U з.с U
b
f2
f1 ном
- напряжение, пропорциональное относительной частоте ротора β.
(5.1-56)
b
f1
f1 ном
S
(5.1-57)
103. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.4 ПЧ с промежуточным звеном постоянного тока и АИТ
При перегрузке или резких изменениях U з.с
УО входит в зону ограничения
выходного сигнала U b = const, ограничивая ток. Двигатель работает при любой
скорости в этом режиме при постоянных значениях тока и абсолютного скольжения, то
есть механическая характеристика становится абсолютно мягкой
0
Uз.с1
U з .с 2 U з .с 1
U з.с 3 U з.с 2
U з.с 0
0
U з.с 4
U з.с 5
Рис.
Рис.5.42
3.40
M
104. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.4 ПЧ с промежуточным звеном постоянного тока и АИТ
В ПЧ со звеном постоянного тока используются инверторы с широтно-импульсной
модуляцией (ШИМ), которые позволяют широкое регулирование напряжения и
частоты и обеспечивают выходной ток синусоидальной формы. При использовании
инверторов с ШИМ в схеме ПЧ может быть применен неуправляемый выпрямитель.
В этих ПЧ используются также широтно-импульсные регуляторы напряжения (ШИР),
которые устанавливаются между источником постоянного тока и инвертором.
L1
VS1
+
E0
-
+
VD
L2
С
VS2
Uн
Рис.5.43
3.41
Рис.
VS1 - основной тиристор,
VS2 - вспомогательный тиристор;
L1 - ограничивающий реактор;
L2-С - коммутирующий контур.
105. 5. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Лекция 75. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
5.6.4 ПЧ с промежуточным звеном постоянного тока
В ПЧ со звеном постоянного тока используются инверторы с широтно-импульсной
модуляцией (ШИМ), которые позволяют широкое регулирование напряжения и
частоты и обеспечивают выходной ток синусоидальной формы. При использовании
инверторов с ШИМ в схеме ПЧ может быть применен неуправляемый выпрямитель.
В этих ПЧ используются также широтно-импульсные регуляторы напряжения (ШИР),
которые устанавливаются между источником постоянного тока и инвертором.
L1
VS1
+
E0
-
+
VD
L2
С
Рис. 5.43
Рис. 3.41
VS2
Uн
-
VS1 - основной тиристор,
VS2 - вспомогательный тиристор;
L1 - ограничивающий реактор;
L2-С - коммутирующий контур.
106. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
b
iв
Uв
оя
дп
ДП
iя
Uя
Рис. 4.1
КО
107. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
b
iв
M K Ф iя
Uв
оя
дп
ДП
iя
КО
K
Pп N
2 a
(4.1-1)
- Конструктивный коэффициент
Uя
E K Ф
U i R Lв diв ;
в
dt
в
L di
U я iя Rя я я dt ;
M K Ф iя .
(4.1-2)
(4.1-3)
108. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
b
iя
iв
Uв
оя
дп
ДП
КО
М
К Ф
(4.1-4)
iя
Uя
Uя
М
L
dM
Rя я
К Ф
К Ф
К Ф dt
(4.1-5)
R
Uя
L
dM
2 я 2 М 2 я 2
К Ф К Ф
К Ф dt
(4.1-6)
R
Uя
L
di
я iя я я
К Ф К Ф
К Ф dt
(4.1-7)
109. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
b
При постоянном токе Iя и потоке Ф:
iв
Uв
оя
дп
ДП
КО
dM diя
0
dt
dt
(4.1-8)
Rя
Uя
I
К Ф К Ф
(4.1-9)
Rя
Uя
2 2 M
К Ф К Ф
(4.1-10)
iя
Uя
0
1) при Iя = 0, М = 0:
2) при Iя = IКЗ, когда 0 :
0
Uя
К Ф
I кз
Uя
;
Rя
(4.1-11)
M кз К Ф
Uя
К Ф I к.з .(4.1-12)
Rя
110. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
b
iв
Uв
оя
дп
ДП
КО
0
iя
f (M )
Uя
f (I )
Мкз
Iкз
М
I
Рис.4.2.
U я К 2 Ф2
M K Ф
Rя
Rя
(4.1-13)
dM
К 2 Ф2
b ст
d
Rя
(4.1-14)
111. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
b
Статическая механическая характеристика:
iв
Uв
оя
дп
ДП
КО
iя
M b ( 0 )
(4.1-15)
M M кз b
(4.1-16)
Статическая электромеханическая характеристика:
Uя
Rя
0
Iя
КФ
I я I кз
U
0 я
К Ф
(4.1-19)
К 2 Ф2
b ст
Rя
(4.1-17)
К Ф
Rя
(4.1-20)
(4.1-18)
Tя
Lя
Rя
(4.1-21)
112. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
Структурную схему двигателя постоянного тока независимого
возбуждения:
b
iв
Uв
оя
дп
ДП
КО
iя
Uя
Uя
1
КФ
0
bс
т яР
1 Т
М
Рис.4.3.
b дин ( p)
b ст
M ( p)
( p)
(1 Tя p)
(4.1-23)
4.2. Режимы работы ДПТ независимого возбуждения
R Rя Rд
(4.1-24)
Rя rоя rд.п rк.о rщ
(4.1-25)
113. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
rоя
- активное сопротивление обмотки якоря;
rд.п
rк.о
rщ
- активное сопротивление обмотки добав. полюсов;
- активное сопротивление компенсационной обмотки;
- активное сопротивление щеточного контакта.
Rов
+
Rв
iв
Lов
Lя
M
Я
I
Rя
Rд
Е
+
Рис.4.4.
U
-
114. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
Уравнения механической и электромеханической характеристик:
Rов
+
Rв
iв
Lов
U
M R
0
К Ф ( К Ф) 2
U
I R
0
К Ф К Ф
Lя
M
Я
I
Rя
Rд
Е
+
U
-
Способы регулирования координат ( , I, M, ) электропривода:
а) изменением сопротивления в цепи якоря;
б) изменением тока возбуждения и, как следствие, магнитного потока Ф;
в) изменением величины подводимого к якорю напряжения.
(4.1-26)
(4.1-27)
115. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
Rов
+
Rв
Lя
M
Я
I
B`
Rя
B
-
Rд
A`
U
I, M
C
0
Е
+
0
A
iв
Lов
I
II
-
0
III
IV
Рис. 4.5
116. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
II
A
0
B`
B I, C
M
0
A`
III
I
- 0
IV
1. Режим холостого хода ДПТ. Точка А или А` при различной
полярности приложенного к якорю напряжения характеризуется
следующими параметрами:
i = 0, M = 0, = 0 . Двигатель не получает электрической
энергии из сети, за исключением потерь на возбуждение и на
трение, и не отдает механической энергии.
2. Двигательный режим имеет место на участке АВ (вращение
вперед), или А`В` (вращение назад), где скорость и момент М
совпадают по направлению. В этом режиме U E ; 0 0;
ток якоря I совпадает по направлению с U и направлен против Е,
электрическая энергия поступает из сети, а механическая
отдается с вала двигателя рабочей машине.
3. Режим короткого замыкания ДПТ. Точка В или B` на характеристиках (рис. 4.5) имеет
следующие параметры: = 0; Е = 0; I = IКЗ = U/R. Электрическая энергия, потребляемая из
сети, рассеивается в виде тепла на сопротивлениях в цепи якоря. Механическая энергия не
отдается рабочей машине.
117. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
II
A
0
B`
B I, C
M
0
A`
III
I
- 0
IV
4. Генераторный режим работы ДПТ параллельно с сетью,
который называется режимом рекуперативного торможения,
имеет место во втором и четвертом квадрантах механических
характеристик. В этом случае скорость больше скорости
холостого хода 0 как для вращения вперед, так и назад. ЭДС
становится больше приложенного к якорю напряжения, I и М
изменяют свое направление на противоположное.
5. Генераторный режим последовательно с сетью, который
называется режимом торможения противо-включением,
имеет место при < 0 (участок В и С или B`С`). В этом
режиме ЭДС совпадает по направлению с напряжением и ДПТ
оказывается включенным последовательно с сетью, ток
совпадает по направлению с Е и U и определяется
I
U E
R
(4.1-28)
118. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
II
A
0
B`
B I, C
M
0
A`
III
I
- 0
6. Режим генератора независимо от сети, который
называется режимом динамического торможения, имеет
место, когда якорная цепь отключена от сети ( U = 0) и замкнута
накоротко или на добавочное сопротивление. Ток якоря I
протекает под дейстивием Е и совпадает по направлению.
При пуске ДПТ:
IV
= 0;
I
Е = 0, тогда
Iдоп = (2-2,5) Iн
U
I кз
R
(4.1-29)
Ограничение Iкз:
Rд
U
I доп
Rя
(4.1-30)
119. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
0
M
н
1
3
I доп
2
4 0
Iн
I2
M
I
0
Рис. 4.6
При динамическом торможении:
Rд 2
E
I доп
Rя
U
I доп
Rя
(4.1-31)
120. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
0
M
При реверсе двигателя, или торможении противовключением
осуществляется изменение полярности напряжения на якоре с
одновременным включением в цепь якоря резистора Rд3 .
н
1
3
I доп
40
2
Iн
I2
M
I
Rд3
U E
2 U
Rя
Rя
I доп
I доп
(4.1-32)
0
4.3. Расчет регулировочных (добавочных) сопротивлений
резисторов
Расчет при пуске, регулировании скорости и торможении ДПТ может производиться
следующими методами:
1. По допустимому току якоря, как показано в п. 4.2.
2. Методом отрезков.
3. Методом пропорций.
121. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.3. Расчет регулировочных (добавочных) сопротивлений
резисторов
Метод отрезков:
0
h
a
1
н
b
Rя
2
g
c
и
Rя +Rд1
f
4
3
d
e
Iн
0
M
I
Рис. 4.7
U
Rн н
Iн
(4.1-33)
ab
Rя Rн
ad
Rд 2 Rн
fg
eh
(4.1-34)
(4.1-36)
Rд1 Rн
bc
ad
(4.1-35)
122. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.3. Расчет регулировочных (добавочных) сопротивлений
резисторов
Метод пропорций:
а
0
Rд = 0
н
ест
Rя
иск Rя Rд
(4.1-37)
Rд1
Rд2
е
Iн
I2
Rд3 I
иск
Rд Rя
1
ест
I доп
Rя 0,5 Rн (1 н )
(4.1-38)
(4.1-39)
Рис. 4.8
I R I
m lg 2 / я доп
I доп U н
(4.1-40)
123. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.4. Регулирование скорости ДПТ независимого возбуждения
изменением магнитного потока
U
R
I
К Ф
К Ф
02
02
Ф2
Ф2
01
Ф1
Фн
0е
0е
Ф1
Фн
M
I
I кз
M кз2
Рис. 4.9
M доп К Ф доп I н
(4.1-42)
01
M к.з. К Ф I к.з
(4.1-41)
Фи Фн
M кз1
M кз
Рис. 4.10
н
и
Pн M н н Pи M доп и const
124. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
U Eп I Rп
Eп
Е
Kп п
Uу
Rп
Кп
П
Uп
U
E
I
М
Рис. 4.11
Rя
K п U у
К Ф
K п U у
К Ф
I
M
(4.1-43)
(4.1-44)
Rя RП
0
K Ф
(4.1-45)
Rя RП
0
( К Ф) 2
(4.1-46)
125. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
Eп
Rп
Кп
П
Uп
0ест
01
Eп2
I
0
U
- 01
E
I
М
Rя
ест
Eп1 U н
- 0ест
Рис. 4.12
Eп 0
M
Eп2
Eп1 U н
126. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
Eп
Rп
Кп
П
Uп
0ест
01
Eп2
I
0
U
- 01
E
I
М
Rя
ест
Eп1 U н
- 0ест
Eп 0
M
Eп2
Eп1 U н
Рис. 4.12
К недостаткам системы Г-Д можно отнести большие установленную мощность и габариты,
повышенные шум, инерционность и эксплуатационные затраты.
127. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
~
~
~
I
M
G
Uрег
i вг
ОВГ
+
-
Рис. 4.13
M
i вд
ОВД
М
128. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
~
ТР
+
VS1
M
ОВД
VS2
L
U у
СИФУ
Рис. 4.14
Eп
Emax m
sin
m
cos Eср.0 cos
Еср.0 – ЭДС преобразователя при = 0
(4.1-47)
129. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
~
0 Eср
ТР
0
+
M
VS1
L
Uу
СИФУ
ОВД
-
cos
К Ф
(4.1-48)
VS2
Eср 0 Cos / К Ф I ( Rн Rп ) / К Ф
(4.1-49)
Ec р 0Cos / K Ф M ( RН RП ) /( К Ф)2
(4.1-50)
R п Х т m / 2 R т R L
Хт , Rт – приведенные ко вторичной обмотке индуктивное и активное сопротивления
обмотки трансформатора;
RL – активное сопротивление сглаживающего реактора.
(4.1-51)
130. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
=0
30 0
А
60 0
90 0
120 0
150 0
180 0
Рис. 4.15
I(M)
131. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
~
Мостовой нереверсивный тиристорный
преобразователь
ТР
VS1
VS4
VS2
VS5
VS3
VS6
L
Iв
Д
OB
Рис. 4.16
132. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
~
a
ТР
VS1
VS2
VS3
VS4
L1
VS5
Рис. 4.17 Схемы электропривода ТП-Д с
реверсивным ТП с нулевым выводом ( а
– перекрестная,
b
– встречнопараллельная)
VS6
L2
L
М
+
ОВД
-
~
b
ТР
+
VS1
VS4
ОВД
VS2
VS3
VS5
-
VS6
L1
L2
L
М
Рис. 2.19
133. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
b
iв
Uв
оя
дп
ДП
iя
Uя
Рис. 4.1
КО
134. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
b
iв
M K Ф iя
Uв
оя
дп
ДП
iя
КО
K
Pп N
2 a
(4.1-1)
- Конструктивный коэффициент
Uя
E K Ф
U i R Lв diв ;
в
dt
в
L di
U я iя Rя я я dt ;
M K Ф iя .
(4.1-2)
(4.1-3)
135. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
b
iя
iв
Uв
оя
дп
ДП
КО
М
К Ф
(4.1-4)
iя
Uя
Uя
М
L
dM
Rя я
К Ф
К Ф
К Ф dt
(4.1-5)
R
Uя
L
dM
2 я 2 М 2 я 2
К Ф К Ф
К Ф dt
(4.1-6)
R
Uя
L
di
я iя я я
К Ф К Ф
К Ф dt
(4.1-7)
136. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
b
При постоянном токе Iя и потоке Ф:
iв
Uв
оя
дп
ДП
КО
dM diя
0
dt
dt
(4.1-8)
Rя
Uя
I
К Ф К Ф
(4.1-9)
Rя
Uя
2 2 M
К Ф К Ф
(4.1-10)
iя
Uя
0
1) при Iя = 0, М = 0:
2) при Iя = IКЗ, когда 0 :
0
Uя
К Ф
I кз
Uя
;
Rя
(4.1-11)
M кз К Ф
Uя
К Ф I к.з .(4.1-12)
Rя
137. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
b
iв
Uв
оя
дп
ДП
КО
0
iя
f (M )
Uя
f (I )
Мкз
Iкз
М
I
Рис.4.2.
U я К 2 Ф2
M K Ф
Rя
Rя
(4.1-13)
dM
К 2 Ф2
b ст
d
Rя
(4.1-14)
138. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
b
Статическая механическая характеристика:
iв
Uв
оя
дп
ДП
КО
iя
M b ( 0 )
(4.1-15)
M M кз b
(4.1-16)
Статическая электромеханическая характеристика:
Uя
Rя
0
Iя
КФ
I я I кз
U
0 я
К Ф
(4.1-19)
К 2 Ф2
b ст
Rя
(4.1-17)
К Ф
Rя
(4.1-20)
(4.1-18)
Tя
Lя
Rя
(4.1-21)
139. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.1. Принцип действия двигателя независимого возбуждения
Структурную схему двигателя постоянного тока независимого
возбуждения:
b
iв
Uв
оя
дп
ДП
КО
iя
Uя
Uя
1
КФ
0
bс
т яР
1 Т
М
Рис.4.3.
b дин ( p)
b ст
M ( p)
( p)
(1 Tя p)
(4.1-23)
4.2. Режимы работы ДПТ независимого возбуждения
R Rя Rд
(4.1-24)
Rя rоя rд.п rк.о rщ
(4.1-25)
140. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
rоя
- активное сопротивление обмотки якоря;
rд.п
rк.о
rщ
- активное сопротивление обмотки добав. полюсов;
- активное сопротивление компенсационной обмотки;
- активное сопротивление щеточного контакта.
Rов
+
Rв
iв
Lов
Lя
M
Я
I
Rя
Rд
Е
+
Рис.4.4.
U
-
141. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
Уравнения механической и электромеханической характеристик:
Rов
+
Rв
iв
Lов
U
M R
0
К Ф ( К Ф) 2
U
I R
0
К Ф К Ф
Lя
M
Я
I
Rя
Rд
Е
+
U
-
Способы регулирования координат ( , I, M, ) электропривода:
а) изменением сопротивления в цепи якоря;
б) изменением тока возбуждения и, как следствие, магнитного потока Ф;
в) изменением величины подводимого к якорю напряжения.
(4.1-26)
(4.1-27)
142. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
Rов
+
Rв
Lя
M
Я
I
B`
Rя
B
-
Rд
A`
U
I, M
C
0
Е
+
0
A
iв
Lов
I
II
-
0
III
IV
Рис. 4.5
143. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
II
A
0
B`
B I, C
M
0
A`
III
I
- 0
IV
1. Режим холостого хода ДПТ. Точка А или А` при различной
полярности приложенного к якорю напряжения характеризуется
следующими параметрами:
i = 0, M = 0, = 0 . Двигатель не получает электрической
энергии из сети, за исключением потерь на возбуждение и на
трение, и не отдает механической энергии.
2. Двигательный режим имеет место на участке АВ (вращение
вперед), или А`В` (вращение назад), где скорость и момент М
совпадают по направлению. В этом режиме U E ; 0 0;
ток якоря I совпадает по направлению с U и направлен против Е,
электрическая энергия поступает из сети, а механическая
отдается с вала двигателя рабочей машине.
3. Режим короткого замыкания ДПТ. Точка В или B` на характеристиках (рис. 4.5) имеет
следующие параметры: = 0; Е = 0; I = IКЗ = U/R. Электрическая энергия, потребляемая из
сети, рассеивается в виде тепла на сопротивлениях в цепи якоря. Механическая энергия не
отдается рабочей машине.
144. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
II
A
0
B`
B I, C
M
0
A`
III
I
- 0
IV
4. Генераторный режим работы ДПТ параллельно с сетью,
который называется режимом рекуперативного торможения,
имеет место во втором и четвертом квадрантах механических
характеристик. В этом случае скорость больше скорости
холостого хода 0 как для вращения вперед, так и назад. ЭДС
становится больше приложенного к якорю напряжения, I и М
изменяют свое направление на противоположное.
5. Генераторный режим последовательно с сетью, который
называется режимом торможения противо-включением,
имеет место при < 0 (участок В и С или B`С`). В этом
режиме ЭДС совпадает по направлению с напряжением и ДПТ
оказывается включенным последовательно с сетью, ток
совпадает по направлению с Е и U и определяется
I
U E
R
(4.1-28)
145. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
II
A
0
B`
B I, C
M
0
A`
III
I
- 0
6. Режим генератора независимо от сети, который
называется режимом динамического торможения, имеет
место, когда якорная цепь отключена от сети ( U = 0) и замкнута
накоротко или на добавочное сопротивление. Ток якоря I
протекает под дейстивием Е и совпадает по направлению.
При пуске ДПТ:
IV
= 0;
I
Е = 0, тогда
Iдоп = (2-2,5) Iн
U
I кз
R
(4.1-29)
Ограничение Iкз:
Rд
U
I доп
Rя
(4.1-30)
146. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
0
M
н
1
3
I доп
2
4 0
Iн
I2
M
I
0
Рис. 4.6
При динамическом торможении:
Rд 2
E
I доп
Rя
U
I доп
Rя
(4.1-31)
147. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.2. Режимы работы ДПТ независимого возбуждения
0
M
При реверсе двигателя, или торможении противовключением
осуществляется изменение полярности напряжения на якоре с
одновременным включением в цепь якоря резистора Rд3 .
н
1
3
I доп
40
2
Iн
I2
M
I
Rд3
U E
2 U
Rя
Rя
I доп
I доп
(4.1-32)
0
4.3. Расчет регулировочных (добавочных) сопротивлений
резисторов
Расчет при пуске, регулировании скорости и торможении ДПТ может производиться
следующими методами:
1. По допустимому току якоря, как показано в п. 4.2.
2. Методом отрезков.
3. Методом пропорций.
148. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.3. Расчет регулировочных (добавочных) сопротивлений
резисторов
Метод отрезков:
0
h
a
1
н
b
Rя
2
g
c
и
Rя +Rд1
f
4
3
d
e
Iн
0
M
I
Рис. 4.7
U
Rн н
Iн
(4.1-33)
ab
Rя Rн
ad
Rд 2 Rн
fg
eh
(4.1-34)
(4.1-36)
Rд1 Rн
bc
ad
(4.1-35)
149. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.3. Расчет регулировочных (добавочных) сопротивлений
резисторов
Метод пропорций:
а
0
Rд = 0
н
ест
Rя
иск Rя Rд
(4.1-37)
Rд1
Rд2
е
Iн
I2
Rд3 I
иск
Rд Rя
1
ест
I доп
Rя 0,5 Rн (1 н )
(4.1-38)
(4.1-39)
Рис. 4.8
I R I
m lg 2 / я доп
I доп U н
(4.1-40)
150. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.4. Регулирование скорости ДПТ независимого возбуждения
изменением магнитного потока
U
R
I
К Ф
К Ф
02
02
Ф2
Ф2
01
Ф1
Фн
0е
0е
Ф1
Фн
M
I
I кз
M кз2
Рис. 4.9
M доп К Ф доп I н
(4.1-42)
01
M к.з. К Ф I к.з
(4.1-41)
Фи Фн
M кз1
M кз
Рис. 4.10
н
и
Pн M н н Pи M доп и const
151. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
U Eп I Rп
Eп
Е
Kп п
Uу
Rп
Кп
П
Uп
U
E
I
М
Рис. 4.11
Rя
K п U у
К Ф
K п U у
К Ф
I
M
(4.1-43)
(4.1-44)
Rя RП
0
K Ф
(4.1-45)
Rя RП
0
( К Ф) 2
(4.1-46)
152. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
Eп
Rп
Кп
П
Uп
0ест
01
Eп2
I
0
U
- 01
E
I
М
Rя
ест
Eп1 U н
- 0ест
Рис. 4.12
Eп 0
M
Eп2
Eп1 U н
153. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
Eп
Rп
Кп
П
Uп
0ест
01
Eп2
I
0
U
- 01
E
I
М
Rя
ест
Eп1 U н
- 0ест
Eп 0
M
Eп2
Eп1 U н
Рис. 4.12
К недостаткам системы Г-Д можно отнести большие установленную мощность и габариты,
повышенные шум, инерционность и эксплуатационные затраты.
154. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
~
~
~
I
M
G
Uрег
i вг
ОВГ
+
-
Рис. 4.13
M
i вд
ОВД
М
155. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
~
ТР
+
VS1
M
ОВД
VS2
L
U у
СИФУ
Рис. 4.14
Eп
Emax m
sin
m
cos Eср.0 cos
Еср.0 – ЭДС преобразователя при = 0
(4.1-47)
156. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
~
0 Eср
ТР
0
+
M
VS1
L
Uу
СИФУ
ОВД
-
cos
К Ф
(4.1-48)
VS2
Eср 0 Cos / К Ф I ( Rн Rп ) / К Ф
(4.1-49)
Ec р 0Cos / K Ф M ( RН RП ) /( К Ф)2
(4.1-50)
R п Х т m / 2 R т R L
Хт , Rт – приведенные ко вторичной обмотке индуктивное и активное сопротивления
обмотки трансформатора;
RL – активное сопротивление сглаживающего реактора.
(4.1-51)
157. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
=0
30 0
А
60 0
90 0
120 0
150 0
180 0
Рис. 4.15
I(M)
158. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 44. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбуждения
изменением подводимого к якорю напряжения
~
Мостовой нереверсивный тиристорный
преобразователь
ТР
VS1
VS4
VS2
VS5
VS3
VS6
L
Iв
Д
OB
Рис. 4.16
159. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.5 Регулирование координат ДПТ независимого возбужденияизменением подводимого к якорю напряжения
~
a
ТР
VS1
VS2
VS3
VS4
L1
VS5
Рис. 4.17 Схемы электропривода ТП-Д с
реверсивным ТП с нулевым выводом ( а
– перекрестная,
b
– встречнопараллельная)
VS6
L2
L
М
+
ОВД
-
~
b
ТР
+
VS1
VS4
ОВД
VS2
VS3
VS5
-
VS6
L1
L2
L
М
Рис. 2.19
160. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.6 Регулирование скорости ДПТ независимоговозбуждения шунтированием якоря
+
-
Rш
Rя
Iш
Е
М
Rп
I
Iп
Рис. 4.20
Уравнения для двух контуров:
U E I Rя I п Rп
(4.1-52)
U I ш Rш I п Rп
(4.1-53)
Iп I Iш
(4.1-54)
161. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.6 Регулирование скорости ДПТ независимоговозбуждения
шунтированием якоря
+
-
Rш
Rя
Iш
Е
М
I
Rп
Iп
Rя a Rп
a 0 I
К Ф
(4.1-55)
Rя a Rп
a 0 M
( К Ф) 2
(4.1-56)
a
Rш
Rш Rп
(4.1-57)
162. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.6 Регулирование скорости ДПТ независимого
возбуждения
шунтированием якоря
+
-
Rш
А1
0
Iш
01
Rя
02
Е
М
I
Rп
=0
Rп1
Rп2
I
Iп
I1
Рис. 4.21
ест. Rп
U
R ш1
Rп
М
Рис. 2.31
Rш = const, Rп = var.
Точка А1 соответствует режиму работы ДПТ, когда он не потребляет ток из сети
(двигатель работает в режиме динамического торможения с током I1)
163. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.6 Регулирование скорости ДПТ независимого
возбуждения
шунтированием якоря
+
-
Rш
Rш1
Iш
Rш2
ест
Rш
Rш = 0
Rя
Е
I1
М
I
I
M
Rп
Iп
Рис. 4.21
Рис. 2.32
B1
Rш = var, Rп = const.
Пересечение искусственных характеристик происходит в точке В1, которая
определяется током I1, проходящим через якорь двигателя.
I1
U
Rп
(4.1-58)
164. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.7 Импульсный способ регулирования координат ДПТ
4.7.1. Импульсное регулирование сопротивления в цепи якоря
К
+
Uв
+
-
g 1
1
3
Rд
U
0
ОВ
2
М
-
Используются два способа управления ключом К:
а) широтно-импульсное регулирование;
б) частотно-импульсное регулирование.
4
g 0 ,3
M(I)
0
Рис. 4.23
g 0 ,6
g 0
Рис. 4.24
165. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.7 Импульсный способ регулирования координат ДПТ
4.7.1. Импульсное регулирование сопротивления в цепи возбуждения
t
g з
Тк
tз
(t з t р )
+
U
М
Rд (1 g ) Rя
2
K Ф ( К Ф)
(4.1-59)
(4.1-60)
-
U
03
M
02
01
ест
К
+
ОВ
Rд
g 0
2
1
0
Рис. 4.25
g 1
M
166. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.7 Импульсный способ регулирования координат ДПТ
4.7.1. Импульсное регулирование шунтированием питающего напряжения
К
+
0
+
V
M
g 1
U=U н
g 0,6
ОВ
g 0 ,3
-
M
0
U=0
g 0
Рис. 4.26
1 g
гр 0 g 1
Tк
(4.1-61)
2Tя
g U
М Rя
К Ф ( К Ф) 2
I гр I кз
g (1 g )
2Т я
Тк
(4.1-63)
(4.1-62)
167. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного тока
последовательного возбуждения
+
U
E
Я
I
Rя
Rд
Rв
Рис.4.27.
Ф
Ф I
tg
I
Рис. 2.45
М К Ф I K I 2
I
M
K
168. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного тока
последовательного возбуждения
Ф
U
R
K I K
(4.1-64)
I
Рис. 2.45
U
R
K M K
(4.1-65)
I
M
I кз
a
М кз
a
Рис. 4.31
169. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного тока
последовательного возбуждения
а
R
K
U
R
0,
K I K
U
R
0,
K
K M
(4.1-66)
I к.з .
U
R
Mк.з
(4.1-67)
U2
2 K
R
(4.1-68)
ДПТ последовательного возбуждения не может работать в генераторном режиме
параллельно с сетью (в режиме рекуперативного торможения)
170. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного тока
последовательного возбуждения
н
н
Мн
М
0
U
K Ф ост
Iн
I
(4.1-69)
171. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного тока
последовательного возбуждения
4.8.1. Способы регулирования координат ДПТ последовательного
возбуждения
e
U
( R Rв )
I я
K Ф
К Ф
( Rя Rв Rд )
U
и
I
К Ф
К Ф
Rя Rв 0,75
Uн
(1 у ) 0,75 R (1 н )
Iн
U
Rд 1 иi Rя Rв
ei I i
(4.1-70)
(4.1-71)
(4.1-72)
(4.1-73)
172. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного тока
последовательного возбуждения
4.8.1. Способы регулирования координат ДПТ последовательного
возбуждения сопротивлением в цепи якоря
e 1
Rд = 0
и1
Rд1
e2
и2
ei
Rд2
I1
I2
Рис.
2.49
Рис.
4.34
Ii
I
173. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного тока
последовательного возбуждения
4.8.1. Способы регулирования координат ДПТ последовательного
возбуждения изменением потока возбуждения
+
-
U
Rш
E
Iш
M
I
Rш2
Rв
Rя
Iв
Рис. 4.36
R ш1
Rш
М
Рис.
Рис.4.37
2.52
174. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного тока
последовательного возбуждения
4.8.1. Способы регулирования координат ДПТ последовательного
возбуждения изменением напряжения на якоре
~
П
Uу
Uн
+
-
U
U1
U2
Rя
U3
M
Rв
М
I
Рис. 4.38
Рис. 4.39
175. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного токапоследовательного возбуждения
4.8.1. Способы регулирования координат ДПТ последовательного
возбуждения шунтированием якоря
Rш
Iп
Rя
+
M
Rв
I
Uн
Рис. 4.40
Rп
176. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного токапоследовательного возбуждения
4.8.1. Способы регулирования координат ДПТ последовательного
возбуждения шунтированием якоря
0
0
-I
U
Rш
I
Рис.
2.57
Рис.
4.41
- Mмакс
Рис.
Рис.4.42
2.58
М
177. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного токапоследовательного возбуждения
4.8.2. Торможение ДПТ последовательного возбуждения
Торможение противовключением (работа генератором последовательно с сетью)
1
2
а
b
Rд
с
Mc
0
Мк3
М
d
3
Рис.4.43
2.59
Рис.
178. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
Лекция 54. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного тока
последовательного возбуждения
4.8.2. Торможение ДПТ последовательного возбуждения
Динамическое торможение ДПТ последовательного возбуждения
+
U
ОВ
Rв
E
E
ОВ
M
M
а)
б)
Rд
Рис. 4.44
Rд
179. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного токапоследовательного возбуждения
4.8.2. Торможение ДПТ последовательного возбуждения
Динамическое торможение ДПТ последовательного возбуждения
R д 3 R д 2 R д1
R д3
R д 2 R д1
R д2
R д2
R д1
R д1
I, M
к1
к2
- I, - M
I, M
Рис.
4.46
Рис.
2.62
Рис.4.45
2.61
Рис.
180. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного токапоследовательного возбуждения
4.8.3. Особенности ДПТ смешанного возбуждения
+
-
U
ОВН
U
R
I
K Ф (I )
К Ф (I )
U
R
M
К Ф (I )
[ К Ф ( I )]2
E
(4.1-74)
ОВП
M
Rв
I
Рис. 4.47
Рис.
Rд
(4.1-75)
181. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного токапоследовательного возбуждения
4.8.3. Особенности ДПТ смешанного возбуждения
Ф
Ф овп
Ф овн
I1
I
Рис.
Рис.4.48
2.64
(4.1-75)
182. 4. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
4.8. Электропривод с двигателями постоянного токапоследовательного возбуждения
4.8.3. Особенности ДПТ смешанного возбуждения
0
0
I1
I
Рис.4.49
2.65
Рис.
- М макс
Рис.4.50
2.66
Рис.
М
(4.1-75)
183. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.1. Электропривод как управляемая электромеханическая система
Под управлением в электроприводе следует понимать
такую организацию преобразования электрической энергии в
механическую, при которой
обеспечивается необходимый
закон изменения во времени
регулируемых координат и,
следовательно,
реализуется
требуемый алгоритм функцинирования электропривода и
обслуживаемой им технологической установки. Управление
по основной регулируемой
координате называется одномерным, а по нескольким –
многомерным.
Рис. 6.1. Общая структура системы управления
электроприводом
184. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.1. Электропривод как управляемая электромеханическая система
Объекты управления в электроприводе – это совокупность элементов, входящих в
силовой канал электропривода: электрический, электромеханический, механический
преобразователи и рабочий орган.
Входные воздействия можно разделить на две группы: управляющие и возмущающие
воздействия, законы изменения которых определяются внешними факторами (момент
нагрузки на валу (Мс), напряжение питающей сети (Uc) и т.д.).
Процессом управления называется процесс формирования управляющих воздействий на
объект управления для реализации требуемого закона изменения выходных регулируемых
координат, а устройством управления – совокупность технических средств,
обеспечивающих процесс управления
Совокупность всех элементов информационного канала, участвующих в процессе
управления, называется системой управления электропривода: устройства
управления, устройства ввода команд оператора, устройства вывода информации о
состоянии привода и технологического процесса для контроля и принятия оператором
управленческих решений, информационно-измерительной системы и схем сопряжения
(интерфейса) устройства управления с вышеперечисленными устройствами.
185. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.1. Электропривод как управляемая электромеханическая система
Информационно-измерительная система (ИИС) включает в себя: датчики параметров сети
(напряжения, частоты и др.); датчики электрических переменных внутри и на выходных
зажимах электрических преобразователей (напряжения, тока, мощности и др.); датчики
электрических
и
электромагнитных
величин,
характеризующих
состояние
электромеханического преобразователя (напряжения, тока, потока и т.д.); датчики
механических переменных на валу двигателя и (или) рабочего органа (скорости, положения,
ускорения, момента, усилия); датчики параметров технологического процесса (температуры,
давления, расхода и т.д.). Датчиками это устройства, обеспечивающие преобразование
величин физических переменных в электрический сигнал. Идеальный датчик обеспечивает
линейность преобразования во всём диапазоне измеряемых переменных
Устройство управления на основе информации о значениях задающих воздействий и
информации, поступающей с объекта управления через ИИС о фактических значениях
координат, вырабатывает управляющие воздействия на объект управления. ИИС находится
на границе между силовым и информационным каналами электропривода, поэтому она, с
одной стороны, относится к системе управления, а с другой – к объекту управления.
186. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.1. Электропривод как управляемая электромеханическая система
Термины
«система
управления
электроприводом»
и
«система
управления электроприводами» будем
использовать для обозначения систем
управления
более
высокого
уровня,
относящихся
уже
не
к
отдельному
электроприводу,
а
к
технологической
установке в целом.
Рис 6.2. Электропривод как система
Система управления металлорежущего
станка
управляет
несколькими
подсистемами:
приводом
главного
движения,
подачи,
вспомогательным
оборудованием (насосом для подачи в зону
обработки
охлаждающей
жидкости,
устройствами
автоматической
смены
инструмента и др.).
187. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.1. Электропривод как управляемая электромеханическая система
Рис 6.3. Иерархия управления в
электроприводе по системе
преобразователь-двигатель
Принцип организации многоуровневых иерархических
систем управления иллюстрирует рис. 6.4. Все системы
более низкого уровня для системы управления верхнего
уровня рассматриваются в качестве объектов управления
третьего уровня, которые вырабатывают управляющие
воздействия для n подсистем (ПС) второго уровня,
устройство управления второго уровня – для k подсистем
первого уровня и т.д. В каждой подсистеме могут быть
свои локальные ИИС. Некоторые датчики (штриховые
линии на рис 6.4) могут использоваться системами
управления различных уровней одновременно.
Рис 6.4. Принцип организации многоуровневых систем
управления
188. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.2. Формирование статических характеристик
электропривода в замкнутой системе преобразователь – двигатель
6.2.1 Замкнутая система ТП-Д с отрицательной обратной связью по
скорости ДПТ
~
I
U зад.с.
U вх
U у
У
-
+ +
П
U
О M
В
М
с BR
-
ТГ
+
O
B
-
U тг g
Рис. 6.5
BR - датчик скорости - тахогенератор;
Uтг - сигнал обратной связи;
у- коэффициент обратной связи по скорости.
K п U у
К Ф
I ( Rя Rп )
0
К Ф
(6.1-1)
K п U у
К Ф
M ( Rя Rп )
0
( К Ф) 2
(6.1-2)
189. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.2. Формирование статических характеристик
электропривода в замкнутой системе преобразователь – двигатель
6.2.1 Замкнутая система ТП-Д с отрицательной обратной связью по
скорости ДПТ
U вх U зад.с. g
Kc
g K у Kп
С
U у K у U вх
(6.1-3)
K у К п U зс
С (1 К c )
K у К п U зс
С (1 К c )
I ( Rя Rп )
С (1 К c )
M ( Rя Rп )
С 2 (1 К c )
- коэффициент усиления системы
С = К*Фном
(6.1-4)
(6.1-5)
(6.1-6)
190. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.2. Формирование статических характеристик
электропривода в замкнутой системе преобразователь – двигатель
6.2.1 Замкнутая система ТП-Д с отрицательной обратной связью по
скорости ДПТ
01
Uзс.1
Uзс.2
1
} зам 2
3
Uзс.3
}
4
5
Uзс1 > Uзс2 > Uзс3
разомкн
I(M)
Ii (Mi)
Рис.
Рис. 2.23
6.6
раз I ( Rя Rп ) / C
замк I ( Rя Rп ) / C (1 Kc) раз /(1 K c )
(6.1-7)
(6.1-8)
191. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.2. Формирование статических характеристик
электропривода в замкнутой системе преобразователь – двигатель
6.2.1 Замкнутая система ТП-Д с отрицательной обратной связью по
скорости ДПТ
01
Uзс.1
1
} зам 2
Uзс.2
}
3
Uзс.3
4
5
Ii (Mi)
Рис.
Рис. 2.23
6.6
разомкн
I(M)
1. Если двигатель работает в установившемся
режиме со скоростью
и увеличится
Мс
нагрузки, то скорость уменьшится и уменьшится
сигнал обратной связи
Uтг. Это вызовет
увеличение Uу, следовательно, увеличится Епр ,
и скорость.
2. Если момент нагрузки уменьшится, скорость
увеличится и уменьшится Uвх = Uзад - g , Uу и
Епр, после чего уменьшится скорость. Таким
образом,
осуществляется
автоматическое
поддержание скорости при изменении
Мс
нагрузки.
192. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.2. Формирование статических характеристик
электропривода в замкнутой системе преобразователь – двигатель
6.2.2. Замкнутая система ТП-Д с отрицательной обратной связью по
напряжению ДПТ
~
I
U вх
Uзад.с.
Uвх
У
Uу
П
U
М
с
+
R
-
О
В
M
-
U ос
Рис. 6.7
U ос U
(6.1-9)
U вх U зад.с. U
(6.1-10)
193. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.2. Формирование статических характеристик
электропривода в замкнутой системе преобразователь – двигатель
6.2.2. Замкнутая система ТП-Д с отрицательной обратной связью по
напряжению ДПТ
K у K п U зад.с
С (1 К c )
K у K п U зад.с
С (1 К c )
Kc K у Kп
раз
I Rп Rя (1 K c )
С (1 К c )
(6.1-11)
M Rп Rя (1 K c )
С 2 (1 К c )
(6.1-12)
- общий коэффициент усиления системы
Rп
I Rя
1 K c
I ( Rя Rп )
з
С
C
(6.1-13)
194. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.2. Формирование статических характеристик
электропривода в замкнутой системе преобразователь – двигатель
6.2.2. Замкнутая система ТП-Д с отрицательной обратной связью по
напряжению ДПТ
ест.
Uзс.1
Uзс.2
1
2
3
4
Uзс.3
5
}
з
}
р
I(M)
Рис. 6.8
Рис.
2.25
При увеличении Мс на валу увеличивается ток якоря I, увеличивается внутреннее падение
напряжения в преобразователе, при этом снижается U на якоре ДПТ.
Тогда Uвх = Uзад.с. - U
увеличится и Uу увеличится, что приведет к росту ЭДС
преобразователя и увеличению U
на якоре двигателя. Происходит автоматическое
регулирование ЭДС преобразователем.
195. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.2. Формирование статических характеристик
электропривода в замкнутой системе преобразователь – двигатель
6.2.3. Замкнутая система ТП-Д с положительной обратной связью по току
якоря
~
I
Uзад.с.
Uвх
У
Uу
М
с
+
П
U
О
Rш В
M
-
+
U ос b I
Рис. 6.9
U ш I Rш I
(6.1-14)
U о.с b I
(6.1-15)
196. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.2. Формирование статических характеристик
электропривода в замкнутой системе преобразователь – двигатель
6.2.3. Замкнутая система ТП-Д с положительной обратной связью по току
якоря
U вх U зад.с b I
K у K п U зс
C
K у K п U зс
C
KC K у Kп b
I ( Rя Rп K C )
C
M ( Rя Rп K C )
C2
(6.1-16)
(6.1-17)
(6.1-18)
- общий коэффициент усиления системы
197. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.2. Формирование статических характеристик
электропривода в замкнутой системе преобразователь – двигатель
6.2.3. Замкнутая система ТП-Д с положительной обратной связью по току
якоря
01
c
п)<K
(Rя + R
2
(Rя + Rп)=Kc
(Rя
+
Рис.6.10
2.27
Рис.
1
4
Rп)>
Kc
3
I(M)
5
при Rя + Rп = Kc - абсолютно жесткая характеристика (линия 1),
при Rя + Rп < Kc - (линия 2) - жесткость характеристики положительна;
при Rя + Rп > Kc - (линия 3) - жесткость характеристики отрицательна
198. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.2. Формирование статических характеристик
электропривода в замкнутой системе преобразователь – двигатель
6.2.4. Регулирование (ограничение) тока и момента в замкнутой системе
ТП-Д с помощью нелинейной отрицательной обратной связи по току
~
I
+
U зад.с.
U
вх У
Uу
М
с
П
M
U
-
Rш
U` ос
-
bI U
ос
УТО
U ос
`
ОВ
Д
Uoc
Uо
п
Рис. 6.11
f (U о.с. )
U о.с
(6.1-19)
U о.с b I
(6.1-20)
199. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.2. Формирование статических характеристик
электропривода в замкнутой системе преобразователь – двигатель
6.2.4. Регулирование (ограничение) тока и момента в замкнутой системе
ТП-Д с помощью нелинейной отрицательной обратной связи по току
I
II
U ос 0
U ос 0
Uзс1
U оп b I отс b I
U ос 0
(6.1-21)
U оп b I отс b I
U ос 0
(6.1-22)
Uзс2
Uзс3
Iотс
Рис.6.12
2.29
Рис.
Iст
K у K п U зс
C
( I I отс ) ( Rя Rп K C )
С
(6.1-23)
I(M)
U з.с
I ст I отс K у K п
Rя Rп K C
(6.1-24)
200. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.3. Регулирование координат электропривода в замкнутой
системе источник тока - двигатель (ИТ-Д)
~U
-Ф1 -Ф2 -Ф3
Ф3 Ф2
Ф1
ИТ
I = const
I=cons
t
М
I
M
+
I
О
В
П
а)
б)
Рис. 6.13
Рис. 6.14
201. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.3. Регулирование координат электропривода в замкнутой
системе источник тока - двигатель (ИТ-Д)
~U
И
Т
I=cons
t
М
ЗП
С
М
У
М
У
+
ЗП
М
-
.
.
ОУм
Iм
ОУс I
c
Рис. 6.15
Iв
`
О
В
+
ВR
V
Обмотка управления ОУМ (обмотка
управления момента) и ОУС (обмотка
управления
скорости).
Последняя
включена в цепь нелинейной обратной
связи, которую образует тахогенератор
BR,
вентиль
V
и
задающий
потенциометр скорости ЗПС.
Вентиль V начинает пропускать Ic при
определенной
ЭДС
тахогенератора,
соответствующей скорости 1 . В этот
момент МДС магнитного усилителя
Fу Fм Fс
(6.1-25)
202. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.3. Регулирование координат электропривода в замкнутой
системе источник тока - двигатель (ИТ-Д)
Uзс
{
1
Uзс2
Uзс
Fc 0
1
Fc 0
3
Uзм 1
Uзм 2
Ф Iв
(6.1-26)
I в b Fу
(6.1-27)
Fс K о.с
(6.1-28)
Uзм 3
М
Рис.6.16
2.36
Рис.
Fм
М
К ос К ос b К I
(6.1-29)
203. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
Рассмотренные в (6.2, 6.3) системы управления относятся к классу систем стабилизации. Их
главный признак: неизменность задающего воздействия, точнее, более медленные
темпы изменения задания, по сравнению со временем его отработки.
В общем случае введение обратных
связей сопровождается включением
в состав устройства управления не
только
компараторов
(устройств
сравнения), но и регуляторов (Р) –
устройств, преобразующих сигнал
рассогласования в управляющее
воздействие
по
некоторому
алгоритму
Рис. 6.17. Замкнутая система управления с
регулятором
Примем регулятор интегральным с
передаточной функцией
Wр ( p ) 1 / Tи p
Tи
– постоянная интегрирования
(6.1-30)
204. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
Системы управления, в которых сигнал рассогласования при действии некоторого
возмущения равен нулю, называются астатическими по отношению к этому возмущению, в
противном случае – статическими.
6.4. Системы программного управления, следящие системы
Рис. 6.18. Структурная схема аналого-цифровой системы
управления цифровым регулятором положения
205. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.4. Системы программного управления, следящие системы
Рис. 6.18. Структурная схема аналого-цифровой системы
управления цифровым регулятором положения
Различают контурные и позиционные системы ЧПУ. Задача последних –
не
воспроизведение заданной траектории, как для контурных, а воспроизведение с
требуемой точностью лишь конечного положения рабочего органа (позиции).
Соответствующие электроприводы получили название контурных или позиционных.
206. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.4. Системы программного управления, следящие системы
Если задающее воздействие на объект управления меняется по заранее неизвестному
закону, а цель системы управления –
воспроизвести это воздействие с требуемой
точностью, то такая система управления называется следящей.
Если управление ведётся в различных законах изменения регулируемой координаты путём
формирования различных управляющих воздействий, то такое управление называется
многозонным (в частности, двухзонным). Пример: регулирование скорости в системе
преобразователь–двигатель вниз от основной посредством изменения напряжения на якоре
и вверх от основной посредством ослабления поля.
Если при управлении формируется сразу несколько управляющих воздействий, такое
управление называется векторным. Пример: регулирование скорости бесколлекторного
двигателя постоянного тока по каналам амплитуды и фазы вектора суммарного напряжения
(тока) статора. Фазовое управление при этом эквивалентно изменению угла коммутации
(аналог – сдвиг щёток с нейтрали в коллекторной машине постоянного тока).
В последние годы в связи с бурным развитием микропроцессорной техники получили
развитие
адаптивные
системы
управления.
Часть
из
них
являются
самонастраивающимися, т.е. такими, в которых параметры регуляторов автоматически
изменяются при изменении условий эксплуатации (нагрузки, момента инерции и др.), а часть
– самоорганизующимися, т.е. такими, в которых автоматически изменяются и структура
(алгоритм), и параметры регуляторов. Процесс адаптации происходит в три этапа:
идентификация объекта управления или системы управления в целом; расчёт параметров
регуляторов; настройка регуляторов и (или) изменение их структуры.
207. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.5. Общие принципы функционального построения и классификация
управляющих устройств
Математические модели устройств управления
Устройства управления делятся на два класса:
- аналоговые (непрерывные);
- дискретные.
АНАЛОГОВЫЕ УСТРОЙСТВА
Сигнал рассогласования:
u (t ) з (t ) ос (t )
Управляющее воздействие:
t
1
y (t ) kп u (t ) u (t )dt
Tи 0
где:
kп
- коэффициент передачи;
Ти – постоянная интегрирования.
Пропорционально-интегральный регулятор. Управляющий сигнал пропорционален
не только сигналу рассогласования, но и интегралу от него.
208. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.5. Общие принципы функционального построения и классификация
управляющих устройств
Математические модели устройств управления
t
x(t ) u (t )dt
0
dx(t )
u (t )
dt
1
y (t ) kп u (t )
x(t )
Tи
Рис. 6.19. Структурная схема
пропорционально-интегрального
аналогового регулятора
209. 6. ПРИНЦИПЫ УПРАВЛЕНИЯ В ЭЛЕКТРОПРИВОДЕ
Лекция 96. ПРИНЦИПЫ УПРАВЛЕНИЯ В
ЭЛЕКТРОПРИВОДЕ
6.5. Общие принципы функционального построения и классификация
управляющих устройств
Математические модели устройств управления
x(t ) A x(t ) B u (t )
y (t ) C x(t ) D u (t )
А 0;
В 1;
C kс Tи ;
D kп
Рис. 6.20. Упрощенная схема цифрового
устройства управления