



")






 Электроника
ЭлектроникаПохожие презентации:
. Автоматизированное управление ХТС. Лекция 3")









Объекты управления и их основные свойства. Автоматизированное управление ХТС Лекция 4
1. Объекты управления и их основные свойства: ёмкость, самовыравнивание, запаздывание. Методы определения свойств объектов
Автоматизированное управление ХТСЛекция 4
Объекты управления и их основные свойства: ёмкость, самовыравнивание,
запаздывание. Методы определения свойств объектов управления.
Свойства объектов управления.
При всем разнообразии объектов управления в химической технологии наиболее часто
встречающиеся из них могут быть разделены на сравнительно небольшое число типов,
обладающих похожими динамическими характеристиками и основными свойствами: емкостью,
способностью к самовыравниванию, запаздыванием.
Слайд 4.1
2.
Автоматизированное управление ХТСЛекция 4
Емкость объектов управления
• Под емкостью объекта (аккумулирующей способностью) обычно понимают его способность
накапливать или сохранять вещество или энергию. Накопление вещества или энергии возможно
благодаря тому, что в каждом объекте имеется сопротивление выходу потоку вещества или энергии.
Слайд 4.2
3.
Автоматизированное управление ХТСЛекция 4
• Объекты управления по числу емкостей подразделяются на одноемкостные и многоемкостные.
Одноемкостный объект управления состоит из одного сопротивления стоку (расходу) вещества или
энергии и одной емкости. К одноемкостным объектам относятся резервуары и аппараты, в которых
регулируется уровень жидкости; аппараты, в которых регулируется давление газа или пара;
теплообменники смесительного типа с непосредственным контактом теплоносителя и нагреваемого (или
охлаждаемого) вещества; участки трубопроводов, на которых регулируется давление или расход, и др.
• Многоемкостные объекты состоят из двух или более емкостей, последовательно соединенных и
разделенных сопротивлениями. Большинство промышленных объектов управления (ректификационные и
абсорбционные колонны, теплообменники, сложные гидравлические системы и др.) являются
многоемкостными объектами.
Слайд 4.3
4.
Автоматизированное управление ХТСЛекция 4
Примеры одноемкостного (а), двухъемкостного (б) , многоемкостного (в) объектов
Слайд 4.4
5.
Автоматизированное управление ХТСЛекция 4
Самовыравнивание объектов управления
Состояние объекта может быть нарушено в результате изменения материальных или
энергетических потоков (притока или стока), т. е. нанесением на объект возмущающих воздействий.
При этом выходные величины будут увеличиваться или уменьшаться в зависимости от того, что
окажется больше — приход или расход. По способности восстанавливать равновесное состояние
после нанесения на объект возмущающего воздействия объекты делят на нейтральные, устойчивые,
неустойчивые.
Слайд 4.5
6.
Автоматизированное управление ХТСЛекция 4
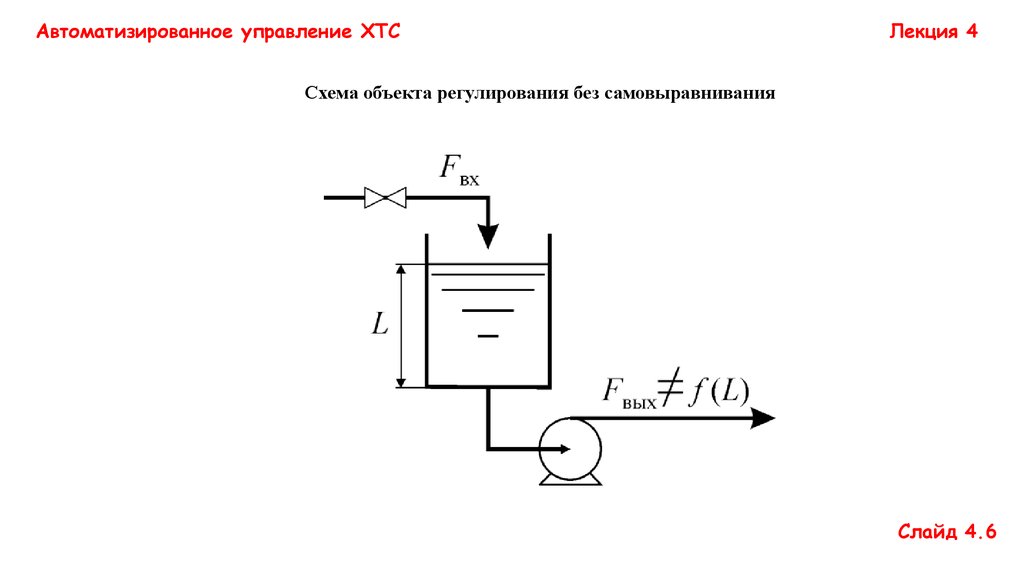
Схема объекта регулирования без самовыравнивания
Слайд 4.6
7.
Автоматизированное управление ХТСЛекция 4
Поведение объекта регулирования без самовыравнивания при
ступенчатом возмущающем воздействии
а – изменение расхода жидкости, б – изменение уровня
Слайд 4.7
8.
Автоматизированное управление ХТСЛекция 4
Способность объекта прийти после нанесения возмущающего воздействия в новое установившееся
состояние
без
вмешательства
управляющего
устройства
называется
самовыравниванием
(саморегулированием).
Схема объекта с самовыравнивание на стоке
Слайд 4.8
9.
Автоматизированное управление ХТСЛекция 4
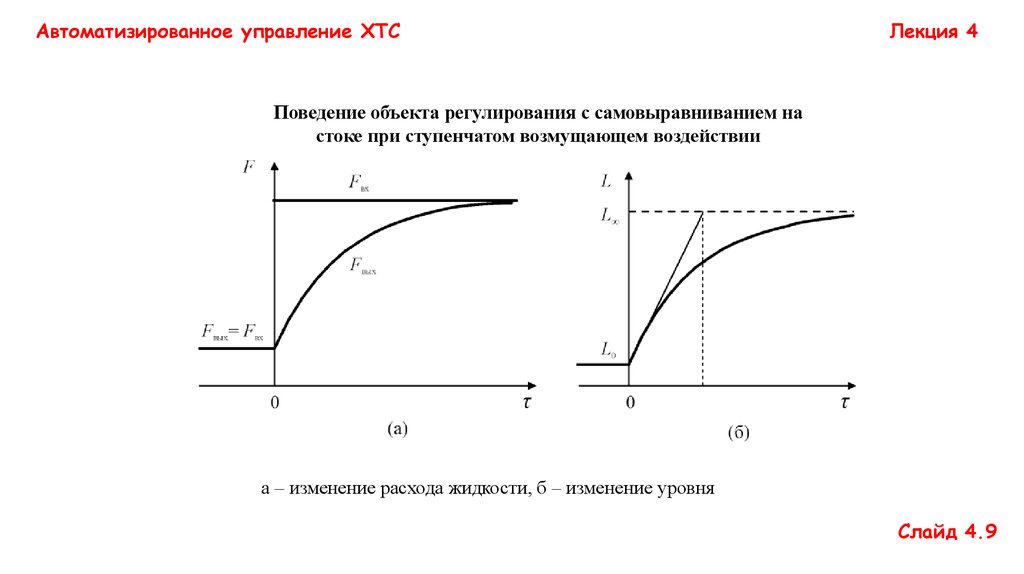
Поведение объекта регулирования с самовыравниванием на
стоке при ступенчатом возмущающем воздействии
а – изменение расхода жидкости, б – изменение уровня
Слайд 4.9
10.
Автоматизированное управление ХТСЛекция 4
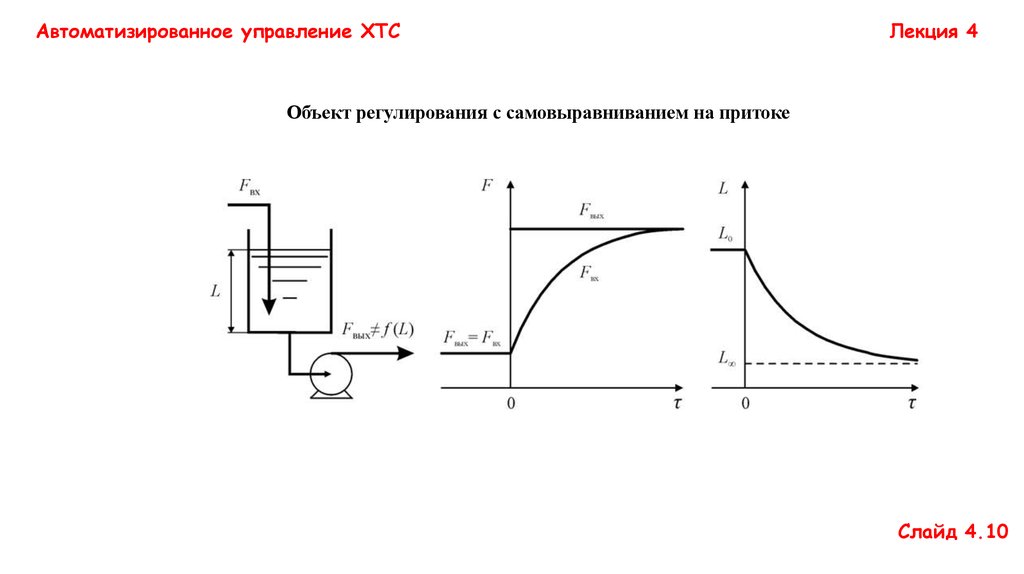
Объект регулирования с самовыравниванием на притоке
Слайд 4.10
11. Объекты с отрицательным самовыравниванием (неустойчивые)
Автоматизированное управление ХТСЛекция 4
Объекты с отрицательным самовыравниванием (неустойчивые)
В объектах с отрицательным самовыравниванием (неустойчивых объектах) изменение выходного
параметра, вызванное возмущающим воздействием, приводит к еще большему неравенству между
притоком и стоком вещества или энергии, что в свою очередь вызывает дальнейшее изменение выходной
величины с постепенно увеличивающейся скоростью.
Структурная схема неустойчивого объекта регулирования
Слайд 4.11
12. Переходные характеристики объектов регулирования
Автоматизированное управление ХТСЛекция 4
Переходные характеристики объектов регулирования
1, 2, 3 – устойчивые объекты, 4 – нейтральный объект, 5 – неустойчивый объект
Слайд 4.12
13.
Автоматизированное управление ХТСЛекция 4
Запаздывание. Транспортное запаздывание.
Свойство объектов, проявляющееся в том, что между моментом нарушения равновесия
(входным воздействием) и началом изменения выходной величины проходит некоторое время, называют
запаздыванием, которое затрудняет регулирование процесса, и с ним нельзя не считаться. Во многих
системах автоматического управления (регулирования) приходится иметь дело со значительным
запаздыванием, возникающим из-за транспортировки вещества, энергии через трубопроводы или иные
элементы оборудования. Запаздывание такого типа носит название транспортного запаздывания.
Слайд 4.13
14.
Автоматизированное управление ХТСЛекция 4
Схема объекта с транспортным запаздыванием
1 – шибер дозировки сыпучего материала, 2 – ленточный транспортер
Слайд 4.14
15.
Автоматизированное управление ХТСЛекция 4
Переходные характеристики
Звено первого порядка с запаздыванием
Звено второго порядка с запаздыванием
Слайд 4.15
16.
Автоматизированное управление ХТСЛекция 4
Переходное запаздывание
В многоемкостных объектах переходное запаздывание возникает при преодолении потоком вещества
или энергии сопротивлений, разделяющих гидравлические, тепловые и другие емкости объекта.
а – переходные характеристики устойчивых объектов. 1 –
нулевого порядка, 2 – первого порядка (одноемкостного),
3 – второго порядка (двухъемкостного), 4 – третьего
порядка (трехъемкостного)
б – структурная схема трехъемкостного объекта
Слайд 4.16
17.
Автоматизированное управление ХТСЛекция 4
Методы определения свойств объектов управления
Экспериментальное определение переходной характеристики реактора
а – схемам установки, б – ступенчатое изменение расхода компонента А (входное воздействие), в –
изменение концентрации продукты С (переходная характеристика)
Слайд 4.17
18.
Автоматизированное управление ХТСЛекция 4
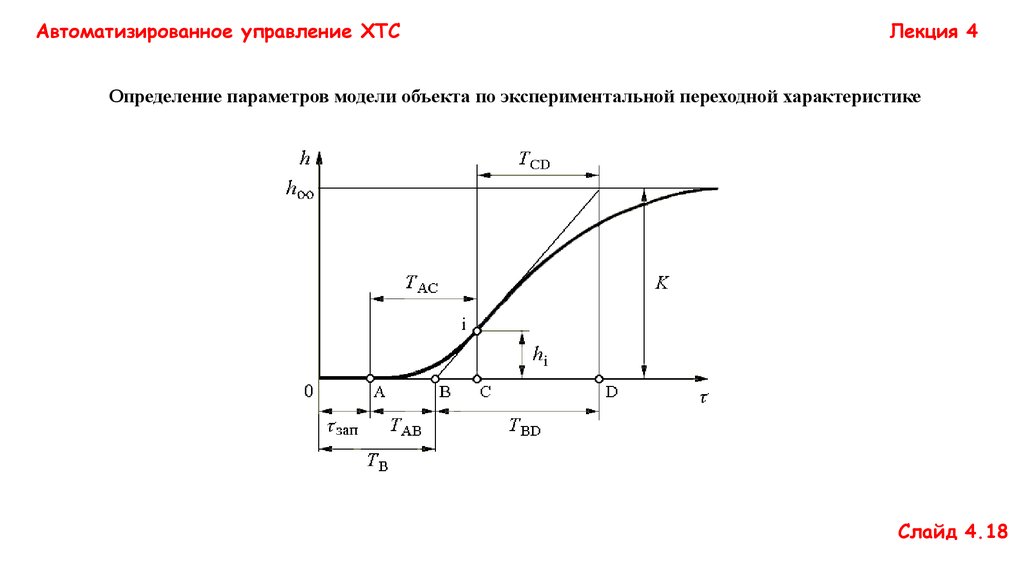
Определение параметров модели объекта по экспериментальной переходной характеристике
Слайд 4.18
19.
Автоматизированное управление ХТСЛекция 4
Номограмма для определения параметров модели объекта
Слайд 4.19