



")



 Физика
Физика Электроника
ЭлектроникаПохожие презентации:









")
Характеристика технологических процессов сельскохозяйственного производства. Классификация систем автоматического регулирования
1. Автоматизация технологических процессов
Модуль 2. Лекция 1. Характеристикатехнологических процессов
сельскохозяйственного производства.
Классификация систем автоматического
регулирования
2. План
1.2.
3.
Информационные параметры САУ
Технологические установки как объекты
автоматизации
Идентификация объектов автоматизации
18.12.2019
АТП Кафедра АСУП БГАТУ
2
3. Информационные параметры САУ
XДатчики
входов
Контролируемый
параметр
Датчики
состояния
Управляеобъекта
мые входы
H
Объект
Uo
Исполнительные
механизмы
Оператор
H
U
Cx
Устройство
управления
Y
Ck
H
Командные
аппараты
Cy
Z
18.12.2019
АТП Кафедра АСУП БГАТУ
3
4. Технологические установки как ОА
Могут быть:5.
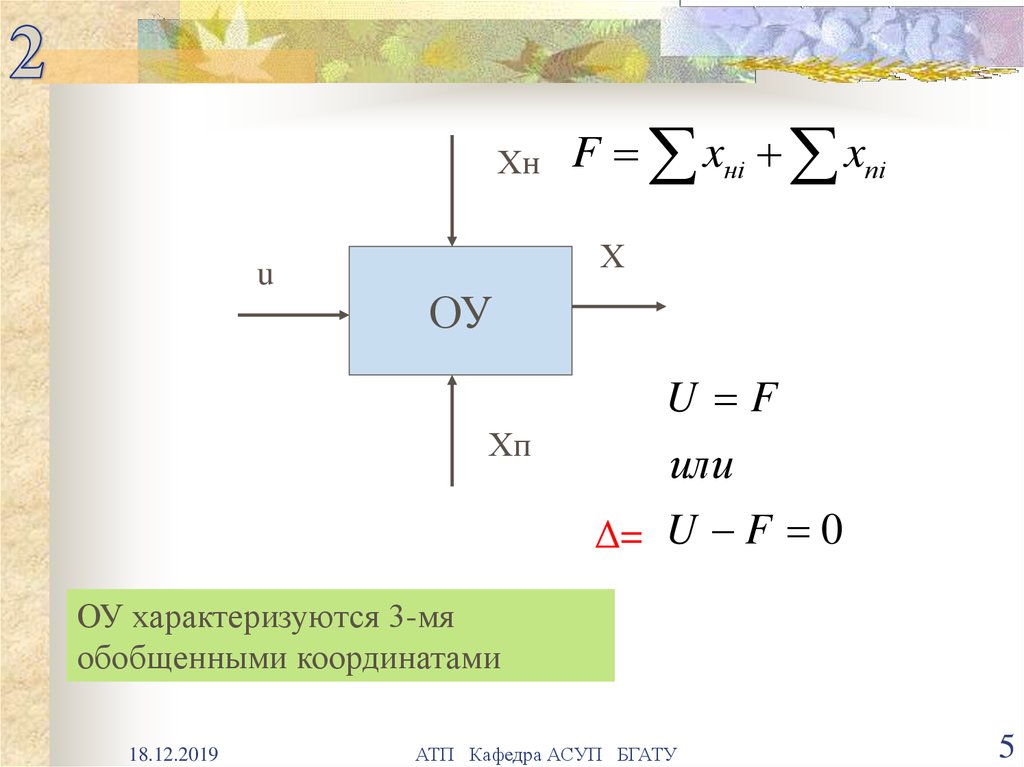
Хнu
F xнi xпi
Х
ОУ
U F
Хп
или
Δ= U F 0
ОУ характеризуются 3-мя
обобщенными координатами
18.12.2019
АТП Кафедра АСУП БГАТУ
5
6. Статическая характеристика – это зависимость между выходной координатой Х и результирующим значением входной координаты (U+F)
приустановившихся режимах
Динамическая
2
характеристика
Х
отражает реакцию1 объекта по
выходной координате х=f(y) на
изменение
входного
воздействия
y,
то3 есть
представляет собой функцию
х=f(t) при
Y
y x0 10 (t )
18.12.2019
АТП Кафедра АСУП БГАТУ
6
7. Получение математического описания объекта управления, в определенном смысле математической модели, по реализации его входных и
выходныхсигналов, называют его
идентификацией
u
18.12.2019
x
АТП Кафедра АСУП БГАТУ
W(P)=…
7
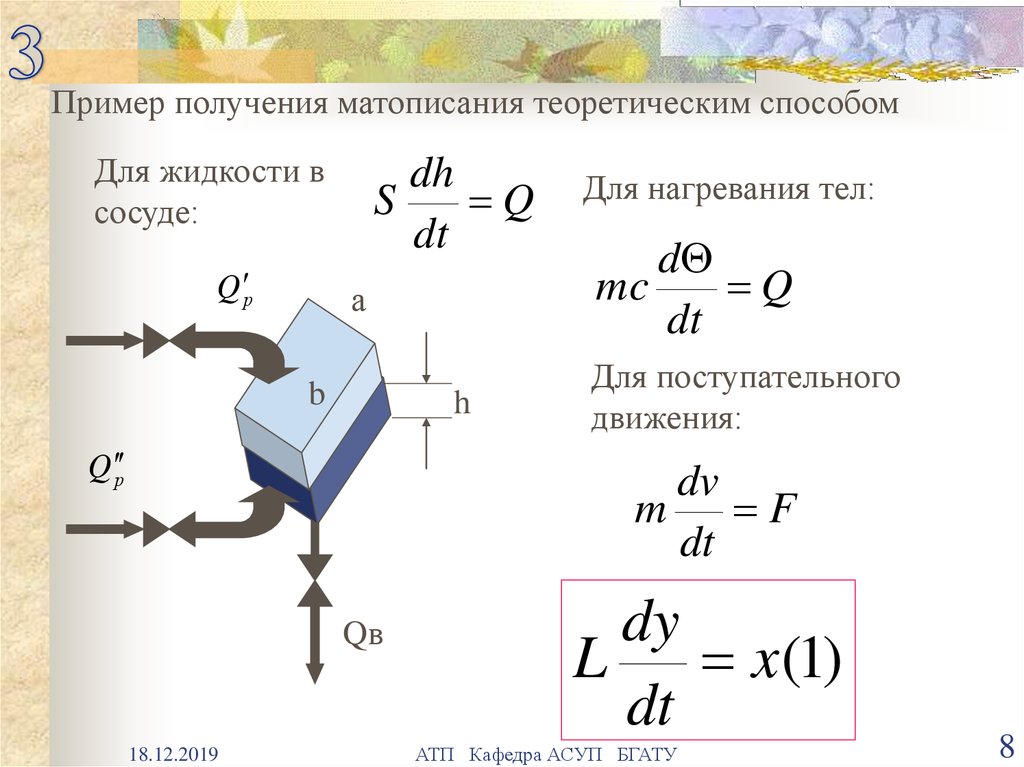
8.
Пример получения матописания теоретическим способомДля жидкости в
сосуде:
Q р
dh
S
Q
dt
а
b
h
Q р
Для нагревания тел:
d
mc
Q
dt
Для поступательного
движения:
dv
m F
dt
Qв
18.12.2019
dy
L
x(1)
dt
АТП Кафедра АСУП БГАТУ
8
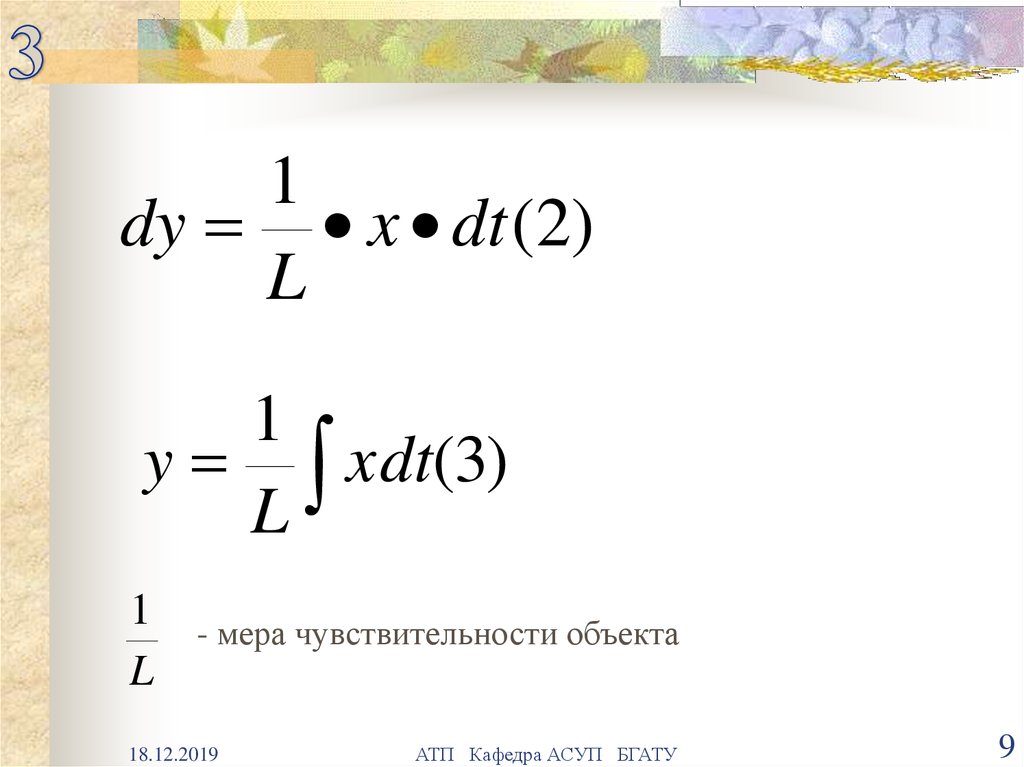
9.
1dy x dt (2)
L
1
y xdt(3)
L
1
L
- мера чувствительности объекта
18.12.2019
АТП Кафедра АСУП БГАТУ
9
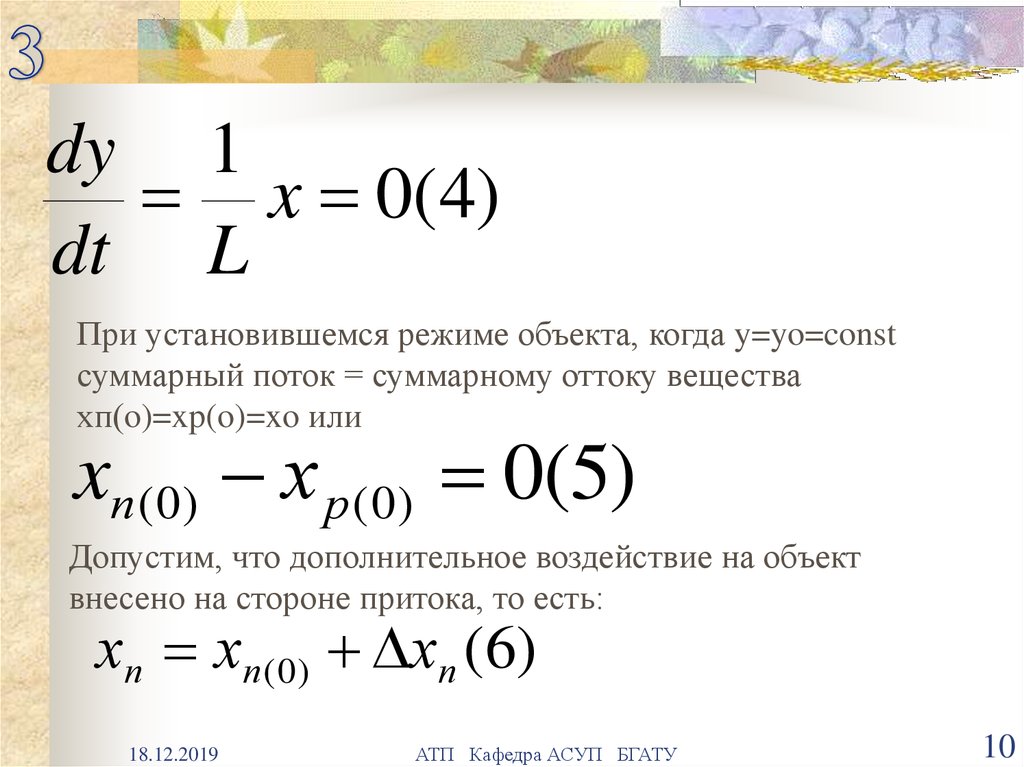
10.
dy 1x 0(4)
dt L
При установившемся режиме объекта, когда y=yo=const
суммарный поток = суммарному оттоку вещества
хп(o)=xp(o)=xo или
xп ( 0) х р ( 0) 0(5)
Допустим, что дополнительное воздействие на объект
внесено на стороне притока, то есть:
хп хп ( 0) хп (6)
18.12.2019
АТП Кафедра АСУП БГАТУ
10
11.
dxпхп хп ( 0 ) (
) 0 y xп (7)
dy
dx р
х р х р (0) (
) 0 y
dy
dx p
dxп
dy
L xп (0) (
)0 y xп х р ( 0) (
)0 y(8)
dt
dy
dy
dx p
dxп
dy
L [(
)0 (
)0 ] y xп (9)
dt
dy
dy
18.12.2019
АТП Кафедра АСУП БГАТУ
11
12.
y, y y 0
y0
х п
, х х0 х п ( 0 ) х р ( 0 )
х0
dx p
dxп
d
Ly0
[(
)0 (
) 0 ] y0 x0 (10)
dt
dy
dy
или
dx p
y0 d y0 dxп
L
[(
)0 (
) 0 ] (11)
x0 dt x0 dy
dy
18.12.2019
АТП Кафедра АСУП БГАТУ
12
13.
y0L
x0
- время, необходимое для заполнения
емкости при полной нагрузке, называется
временем астатического разгона объекта Tа
x0
1
Ta y0 L
- скорость разгона при полной
нагрузке
dx p
y0 dxп
[(
)0 (
)0 ]
x0 dy
dy
d
Ta
(12)
dt
или
Ta d
1
/ / dt
/ /
18.12.2019
- коэффициент статизма
или самовыравнивания
объекта
Ta
L
T
dx p
dxп
/ /
(
)0 (
)0
dy
dy
АТП Кафедра АСУП БГАТУ
13
14.
1/ /
k
1
y0
dx0
dхп
[(
) (
)0 ]
x0 dy 0
dy
- коэффициент передачи
d
T
k , (13)
dt
k
W ( P)
TP 1
Решение :
0
(1 e
18.12.2019
Ta
t
), (14)
АТП Кафедра АСУП БГАТУ
14
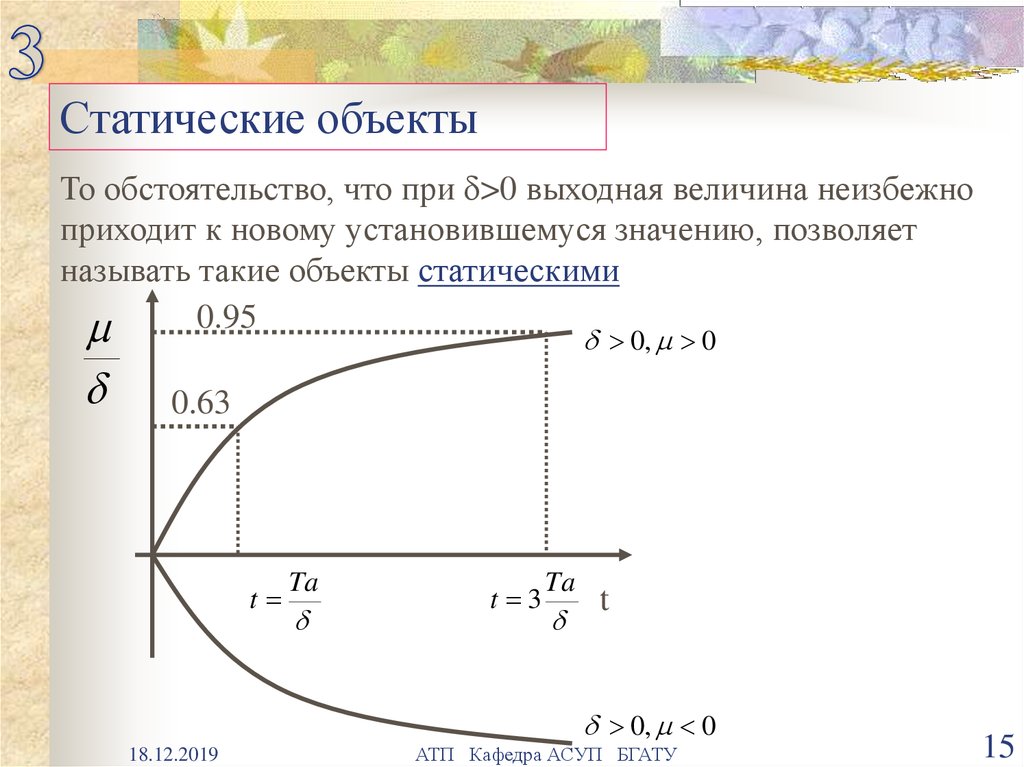
15.
Статические объектыТо обстоятельство, что при >0 выходная величина неизбежно
приходит к новому установившемуся значению, позволяет
называть такие объекты статическими
0.95
0, 0
0.63
t
Ta
t 3
Ta
t
0, 0
18.12.2019
АТП Кафедра АСУП БГАТУ
15
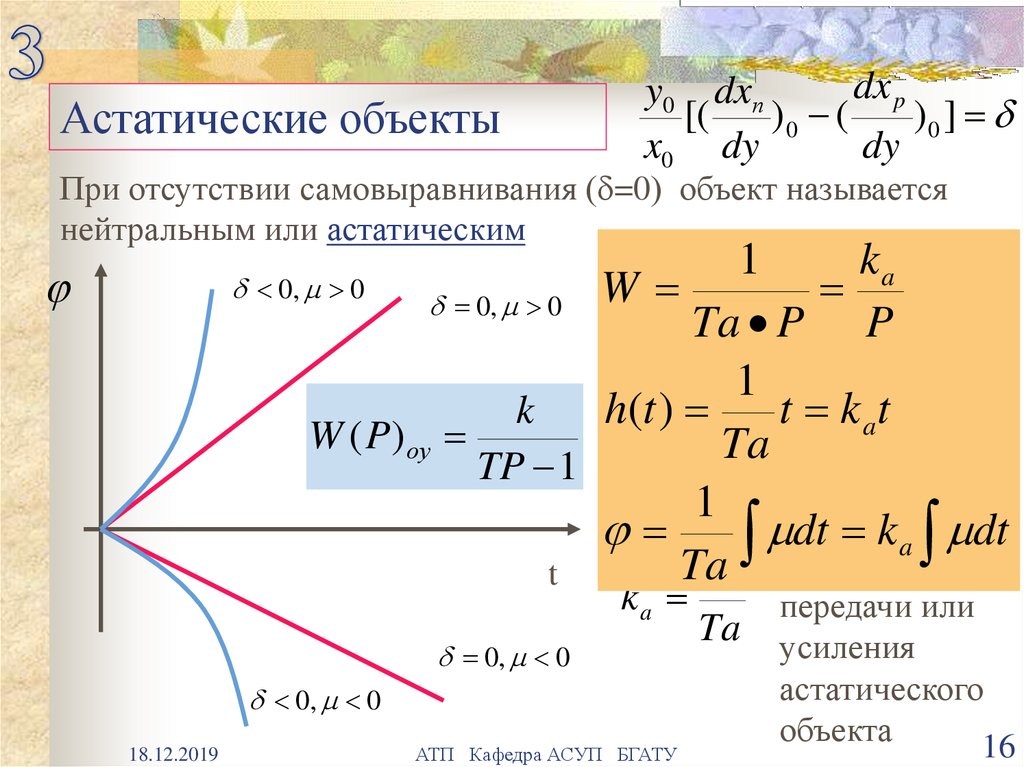
16.
Астатические объектыdx p
y0 dxп
[(
)0 (
)0 ]
x0 dy
dy
При отсутствии самовыравнивания ( =0) объект называется
нейтральным или астатическим
1 Tа dk a ,
0, 0
0, 0 W
Ta P dtP
1 или
h(t )
t kat
k
W ( P) оу
d
Ta
TP 1
ka
1
dt
dt k a dt
Ta1 - коэффициент
t
ka
0, 0
0, 0
18.12.2019
АТП Кафедра АСУП БГАТУ
Ta
передачи или
усиления
астатического
объекта
16
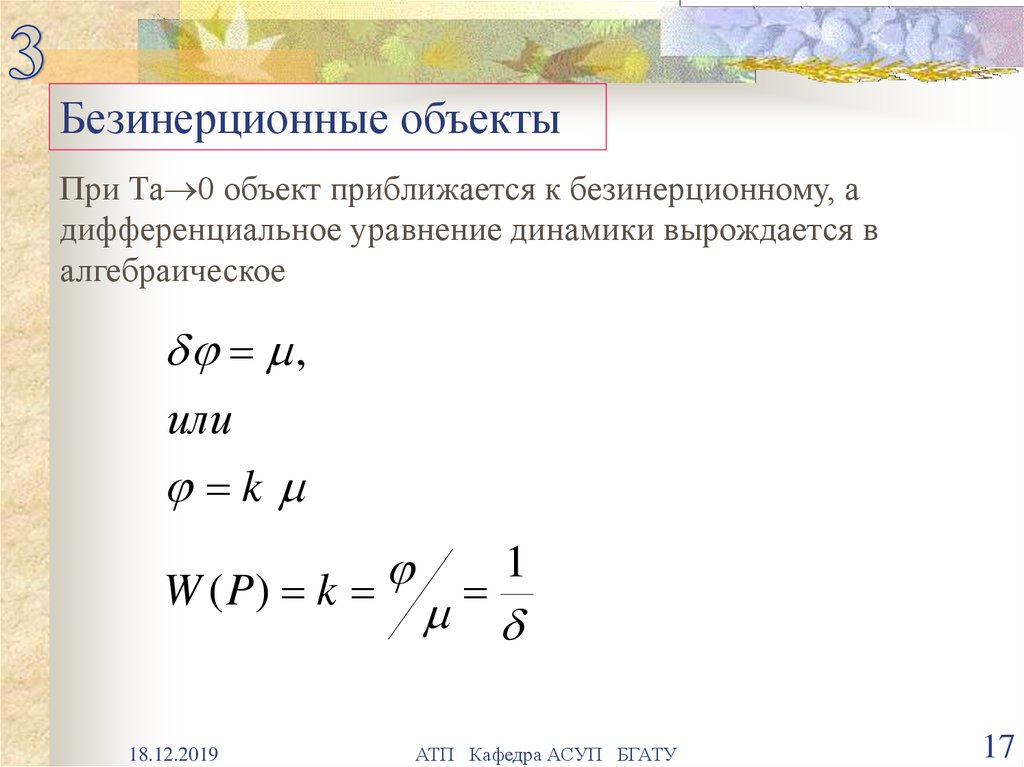
17.
Безинерционные объектыПри Та 0 объект приближается к безинерционному, а
дифференциальное уравнение динамики вырождается в
алгебраическое
,
или
k
W ( P) k
18.12.2019
1
АТП Кафедра АСУП БГАТУ
17
18.
Многоемкостные объектыпI рп
или
y I ( 0 ) dxпI
yп ( 0 ) dx рп
(
)0
(
)0
xI ( 0 ) dy I
xп ( 0 ) dyп
k
W ( P) 2 2
T01P T02 P 1
18.12.2019
АТП Кафедра АСУП БГАТУ
18
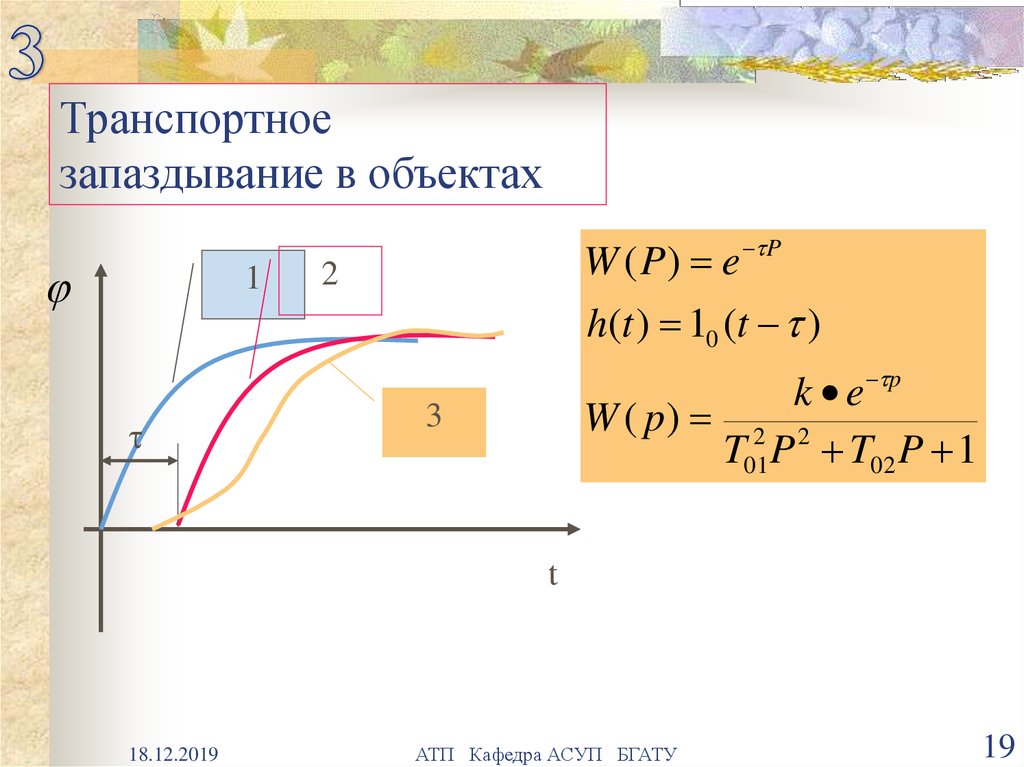
19.
Транспортноезапаздывание в объектах
1
W ( P ) e P
2
h(t ) 10 (t )
k e p
W ( p) 2 2
T01P T02 P 1
3
t
18.12.2019
АТП Кафедра АСУП БГАТУ
19
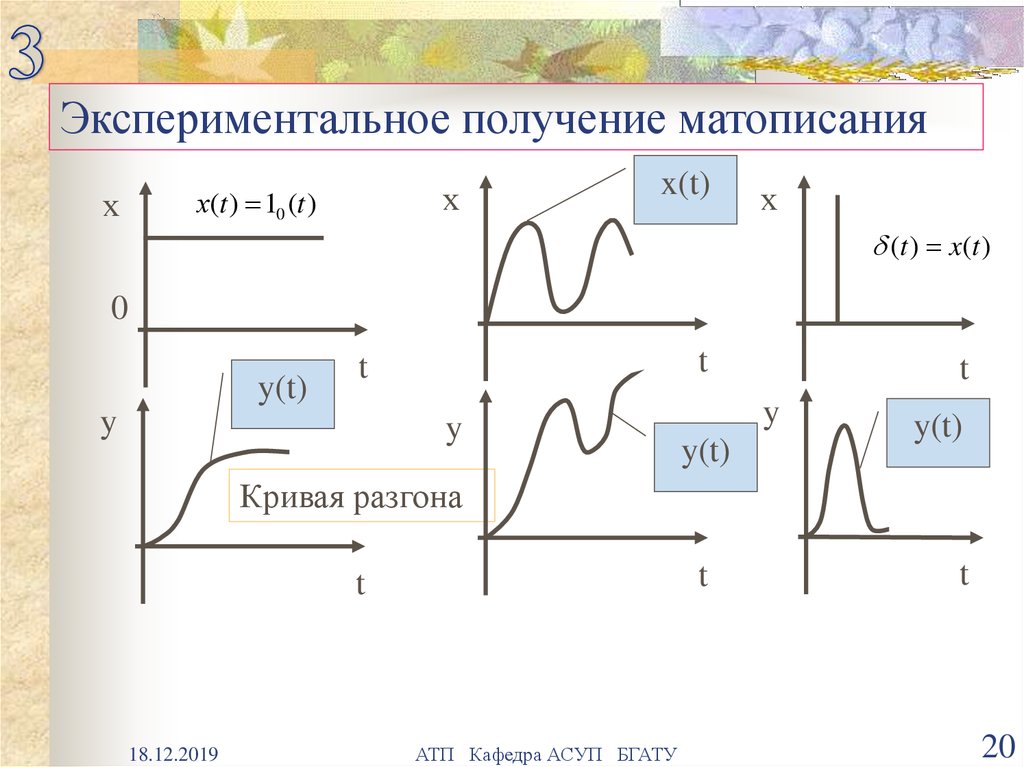
20.
Экспериментальное получение матописаниях
х
х(t ) 10 (t )
x(t)
х
(t ) x(t )
0
y(t)
t
t
y
y
t
y
y(t)
y(t)
Кривая разгона
t
t
18.12.2019
АТП Кафедра АСУП БГАТУ
t
20
21.
Экспериментальное получение матописания1. Находится экспериментальная переходная функция ОУ
2. По ее виду определяется наиболее близко соответствующая
ей передаточная функция
3. В результате графоаналитической обработки переходной
функции определяются численные значения параметров
передаточной функции
4. По полученной передаточной функции рассчитывается
теоретическая переходная функция. Если она достаточно
близко апроксимирует экспериментальную кривую
найденная передаточная функция принимается в качестве
матмодели ОУ. В противном случае необходимо подбирать
передаточную функцию, дающую лучшие совпадения
расчетной и экспериментальной переходной функции
18.12.2019
АТП Кафедра АСУП БГАТУ
21
22.
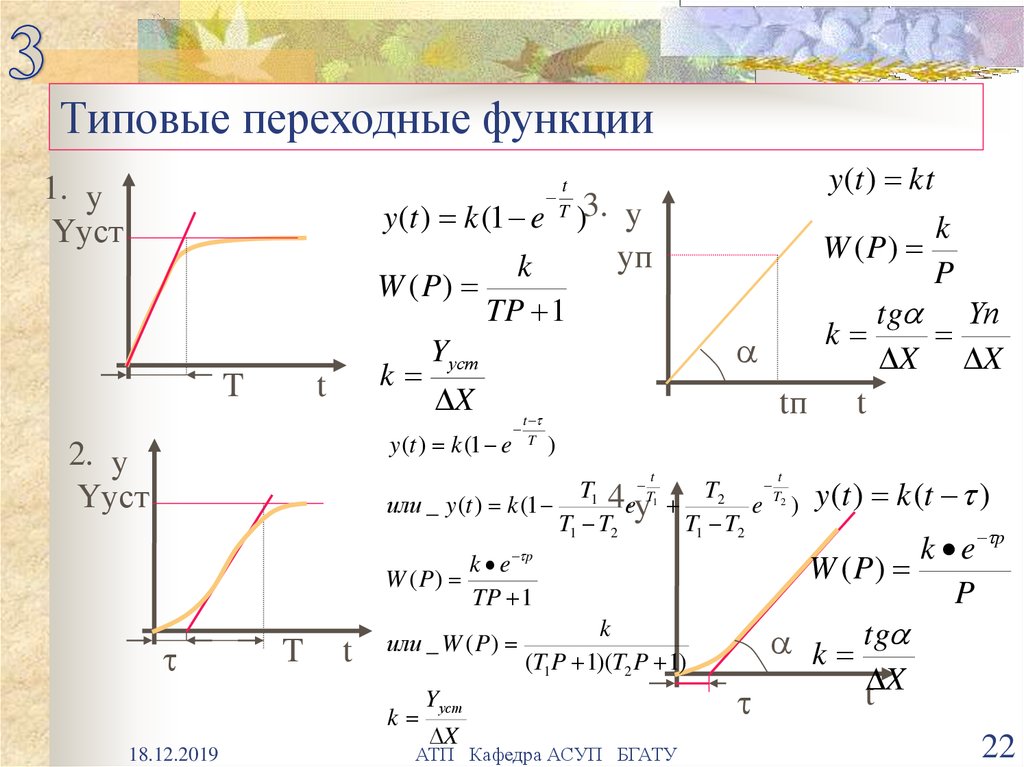
Типовые переходные функции1. y
Yуст
y (t ) kt
t
T
y (t ) k (1 e )3. y
T
k
W ( P)
TP 1
Yуст
k
X
t
t
y (t ) k (1 e
2. y
Yуст
T
W ( P)
yп
k
tп
t
t
T
t
k
18.12.2019
p
k e
TP 1
или _ W ( P )
k
(T1 P 1)(T2 P 1)
Yуст
X
tg Yп
X X
t
)
T1 4. T1
T2
или _ y (t ) k (1
ey
e T2 )
T1 T2
T1 T2
W ( P)
k
P
АТП Кафедра АСУП БГАТУ
y (t ) k (t )
k e p
W ( P)
P
k tg
t X
22