






 Электроника
ЭлектроникаПохожие презентации:










Микропроцессорные средства управления. Цифровые дифференциальные защиты
1. Микропроцессорные средства управления
А.Н. КозловЦифровые дифференциальные
защиты.
2.
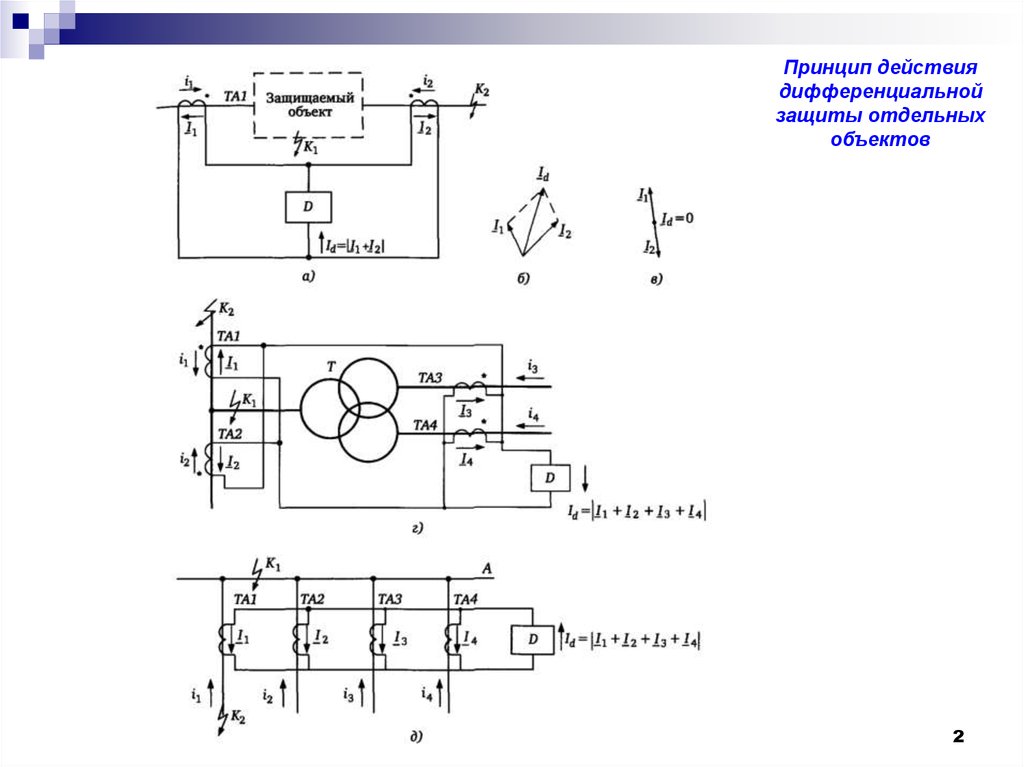
Принцип действиядифференциальной
защиты отдельных
объектов
2
3.
|Σḻ| - дифференциальный ток(модуль суммы векторов
токов) - Id;
Σ|ḻ| - тормозной ток
(сумма модулей векторов
токов) - Is;
БС – блок сравнения.
3
4.
КЗ в зоне защитыТоки совпадают по фазе,
тогда
Id=|İ1+İ2|=3;
Is=|İ1|+|İ2|=3.
Внешнее КЗ
Токи противоположны по фазе,
тогда
Id=|İ′1-İ′2|=0;
Is=|İ′1|+|İ′2|=2,4.
4
5.
КЗ в зоне защитыТоки совпадают по фазе,
тогда
Id=|İ1+İ2|=3;
Is=|İ1|+|İ2|=3.
Точка а при КЗ в зоне
имеет координаты (3, 3)
и лежит в области
срабатывания
Область
срабатывания
Область
торможения
Внешнее КЗ
Токи противоположны по фазе,
тогда
Id=|İ′1-İ′2|=0;
Is=|İ′1|+|İ′2|=2,4.
Точка b при внешнем КЗ
имеет координаты (2,4, 0) и
находится в области
торможения
Для надежного
срабатывания защиты
характеристика 1 всегда
должна располагаться
ниже прямой с наклоном
45°, т.е. k =Id / Is < 1.
5
6.
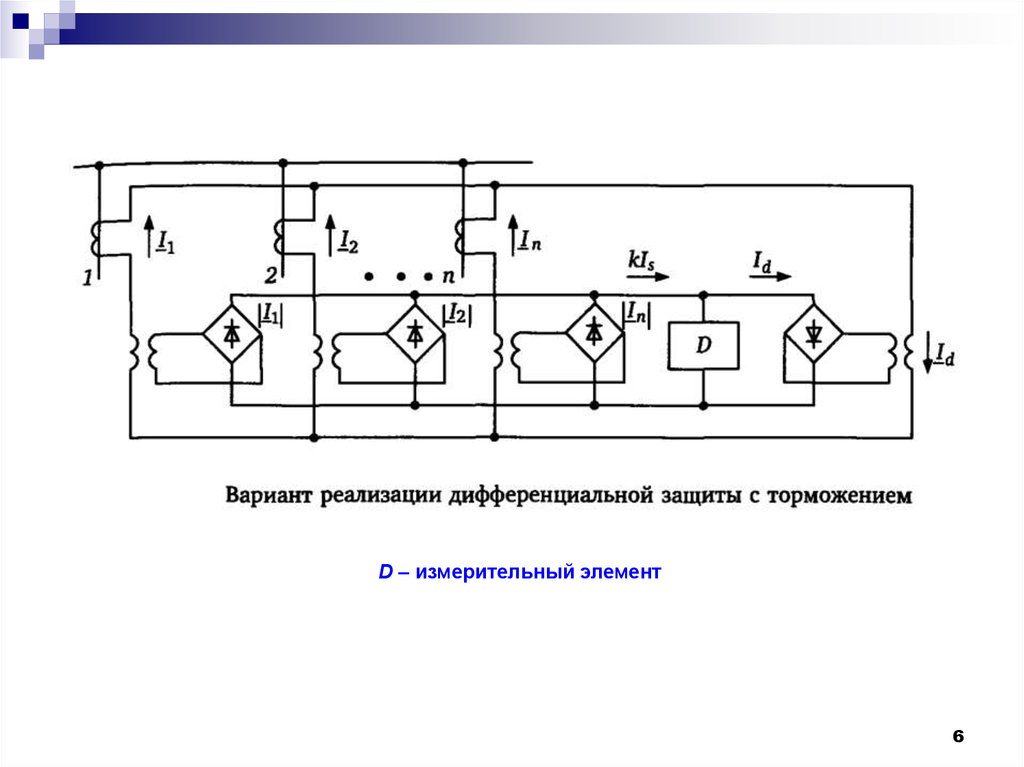
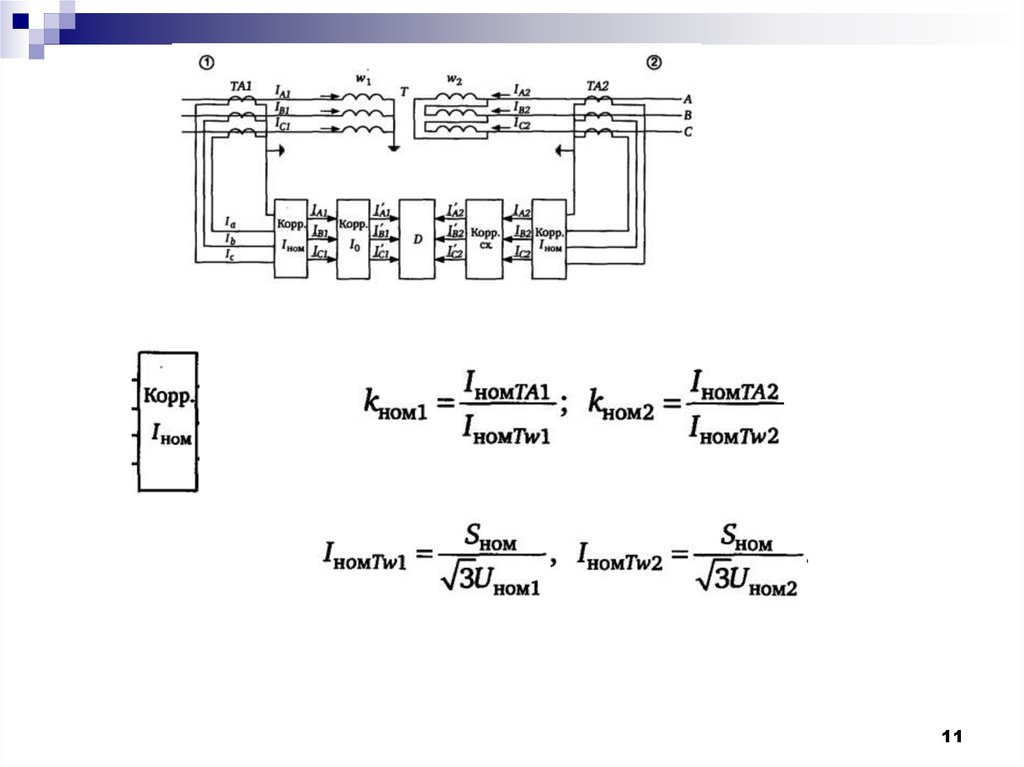
D – измерительный элемент6
7.
78.
89.
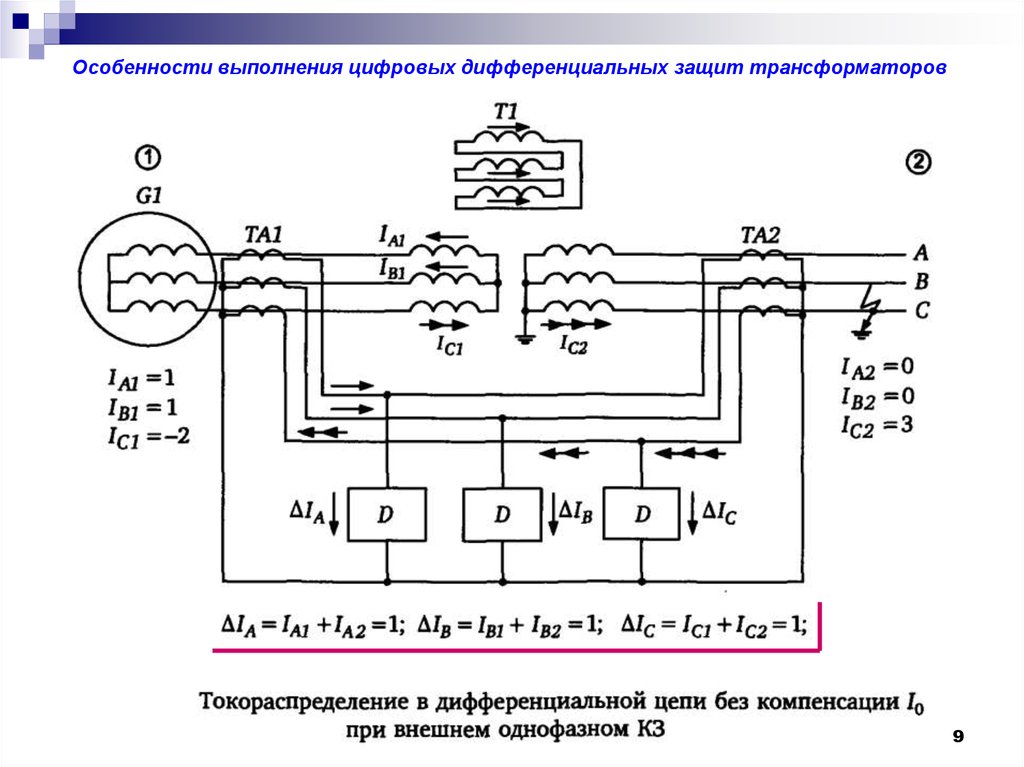
Особенности выполнения цифровых дифференциальных защит трансформаторов9