


















 общепромышленных механизмов по типам электродвигателей:")














")























 Промышленность
ПромышленностьПохожие презентации:










Электрооборудование общепромышленных установок
1. Электрооборудование общепромышленных установок
Лекция 12. Классификация и обзор общепромышленных механизмов
• Наиболее важные классифицирующие признаки :–
–
–
–
назначение механизмов;
конструктивное исполнение;
область применения;
характеристика технологического процесса.
3. Классификация и обзор общепромышленных механизмов
• По назначению общепромышленные механизмыделятся на:
– подъёмно–транспортные;
– землеройные;
– машины для транспортировки жидкостей и
газов;
– машины для сжатия газов (турбомеханизмы);
- промышленные манипуляторы и роботы
4. По характеру технологического процесса
–установки непрерывного действия;–установки циклического действия.
5.
ОБЩЕПРОМЫШЛЕННЫЕ МЕХАНИЗМЫЦиклического действия
Механизмы
передвижения (поворота)
Непрерывного действия
Механизмы
подъема
(тяги)
ЦентробежКонвейеры
ные
механизмы
Поршневые
механизмы
Общепромышленные механизмы и технологические комплексы
6. По области применения
металлургические
горные
строительные машины
т. п.
7. Общепромышленные механизмы циклического действия
• подъемные краны,• одноковшовые экскаваторы,
• стационарные подъемники различных
конструкций и назначения,
• маятниковые канатные дороги,
• конвейеры циклического действия,
• различные манипуляторы,
• промышленные роботы.
8. Мостовой кран
1 — двигатель подъема; 2 - двигатель передвижения тележки; 3 — двигательпередвижения моста; 4 — гибкий кабель питания электроприводов тележки и
подъема
9.
Тележка с подъемнымэлектромагнитом (а) и эскиз
расположения оборудования на
грейферной тележке (б):
1 — двигатель передвижения тележки; 2 —
кабельный барабан; 3 — подъемный
электромагнит; 4 — двигатель подъемного
механизма; 5 — тормозные электромагниты;
6 — конечный выключатель подъема; 7, 8 —
двигатели подъема и закрывания грейфера
10. Внешний вид козлового крана
11. Внешний вид строительного башенного крана
12. Внешний вид портального крана
13. Наклонная и вертикальная подъемная установка
14. Общепромышленные механизмы непрерывного действия
Общепромышленные
механизмы непрерывного
действия
конвейеры эскалаторы,
кольцевые канатные дороги,
многокабинные подъёмники,
центробежные насосы,
вентиляторы,
компрессоры,
воздуходувки,
насосы
компрессоры поршневого типа
15. Ленточный конвейер
16. Подвесной цепной конвейер
17. Требования, предъявляемые к электроприводу промышленных механизмов
1. Обеспечение заданного технологическогопроцесса и требуемой производительности.
2. Обеспечение требуемых условий пуска и
торможения (в том числе по величине
ускорения) производственных механизмов, а
при необходимости - реверсирования и
регулирования скорости.
3. Ограничение перегрузок, динамических и
ударных.
4. Принцип управления электроприводом
(ручное, автоматическое, программное и т.п.).
18.
5. Требования по надежности, которые, какправило, отражаются в заданном времени
наработки на отказ.
6.
Требования
по
конструктивной
защищенности
электрооборудования
(степени
защиты
IP),
по
условиям
окружающей
среды,
климатическому
исполнению.
7. Экономические показатели; к которым
следует относить не только минимальную
стоимость электропривода, но и затраты
электроэнергии на его работу.
8. Экологические требования. К ним относят
уровень шума и ограничение влияния
электропривода
на
питающую
сеть,
связанное
с
мощностью
искажения,
вызванную высшими гармониками тока.
19. Общие вопросы электропривода промышленных механизмов
20. Основные системы электропривода (СЭП) общепромышленных механизмов по типам электродвигателей:
• СЭП с асинхронным двигателем с короткозамкнутым ротором;• СЭП с асинхронным двигателем с фазным ротором;
• СЭП с двигателем постоянного тока с независимым
возбуждением;
• СЭП с двигателем постоянного тока со смешанным
возбуждением;
• СЭП с двигателем постоянного тока с последовательным
возбуждением;
• СЭП с синхронным двигателем.
21. СЭП с асинхронным двигателем с короткозамкнутым ротором;
Механические характеристикиасинхронного
короткозамкнутого двигателя
Механические характеристики
асинхронного двигателя
при питании
от ТРН
Механические характеристики
двухскоростного
асинхронного двигателя
Механические характеристики
асинхронного двигателя
при питании
от преобразователя частоты
22. СЭП с асинхронным двигателем с фазным ротором
б)а) R
М
t
t
U1
Т
UD
-
+
t
U2
R
t
в)
Механические характеристики
асинхронного двигателя
с фазным ротором
C R3 +
VS1
+
U1
1
U2
VS2
2
М
Характеристики асинхронного двигателя
при широтно-импульсном регулировании
сопротивления цепи ротора
23. Асинхронно–вентильный каскад
24. СЭП с двигателем постоянного тока
Механические характеристики двигателяпостоянного
тока
независимого возбуждения
Механические характеристики двигателя
постоянного
тока последовательного
возбуждения
25. Упрощенная схема системы Г-Д
26. Упрощённая схема системы ТП-Д
27. СЭП с синхронным двигателем
Механические характеристики синхронногодвигателя
Блок-схема включения
синхронного двигателя
по схеме «вентильный двигатель»
Блок-схема НПЧ-СД
28. Исполнение электродвигателей общепромышленных механизмов
Нормальное
Краново-металлургическая серия (ПВ 15,25,40,60)
экскаваторные электродвигатели
Закрытого исполнения
3 группы:
1) закрытые невентилируемые;
2) закрытые вентилируемые (самовентилируемые или с принудительной вентиляцией);
3) герметичные, обеспечивающие непроникновение влаги внутрь при полном погружении
в воду.
• Взрывобезопасного исполнения
• защищённого исполнения
3 группы:
1) защищённый от случайного прикосновения к токоведущем частям и проникновения
посторонних тел внутрь двигателя;
2) защищённый от попадания капель воды сверху;
3) защищённый от дождя и брызг.
29. ЭЛЕКТРОПРИВОД НАСОСОВ, ВЕНТИЛЯТОРОВ, КОМПРЕССОРОВ
Общие сведения30. Основные особенности работы электроприводов
зависимость момента нагрузки имощности на валу от скорости
вращения;
2. длительный режим работы;
3. отсутствие реверсов и торможений;
4. ограниченный диапазон регулирования
скорости вращения;
5. отсутствие перегрузок.
1.
31. Назначение и устройство насосов, вентиляторов и компрессоров
32. конструктивное исполнение и устройство насосов, вентиляторов и компрессоров
33.
По конструктивному исполнению иустройству насосы, вентиляторы и
компрессоры имеет много общего, и
подразделяются на
• машины лопастного типа
• машины объемного типа
34. Лопастные машины
Наличие вращающегося рабочего колеса с лопастями является отли-чительнымпризнаком лопастных машин (в технической литературе такие машины часто
называют турбомеханизмами)
35.
36. Машины объемного типа (компрессоры)
37.
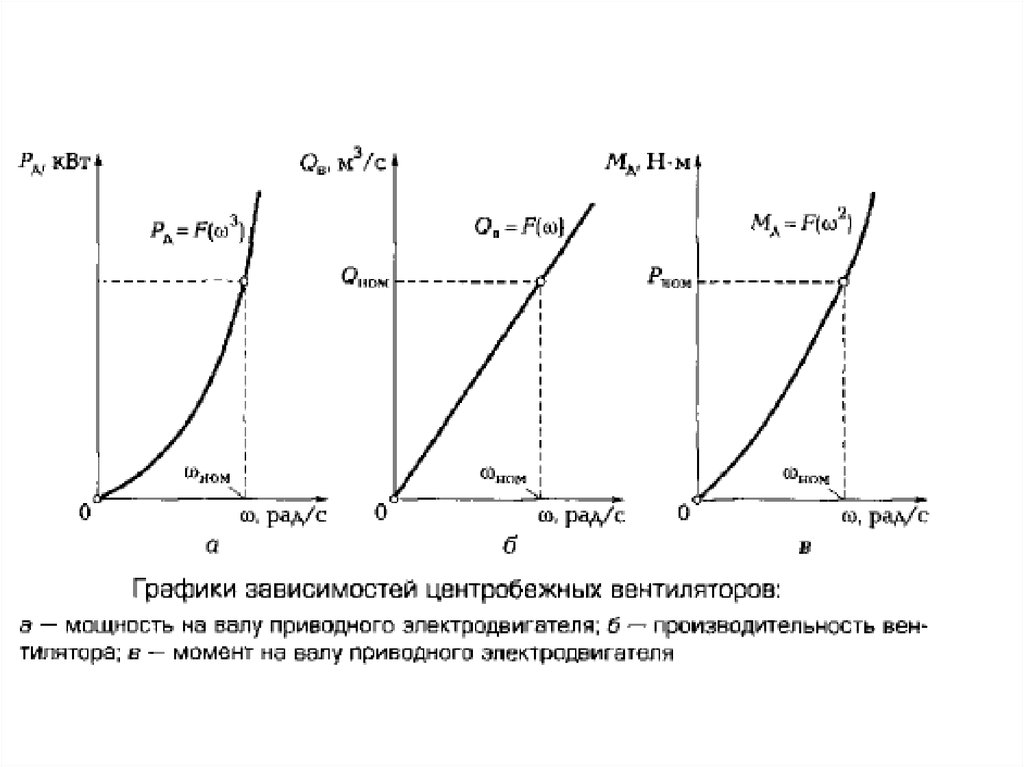
38. Характеристики лопастных насосов и вентиляторов
Системы электроприводанасосов, вентиляторов и
компрессов
Системы нерегулируемых электроприводов;
Системы регулируемых электроприводов.
39. Системы электропривода насосов, вентиляторов и компрессов
основными видами электроприводатурбомеханизмов являются
1. Асинхронные двигателя с короткозамкнутым ротором для мощности
порядка
до 250 кВт.
2. Синхронные высоковольтные приводы для нерегулируемых машин
мощностью выше 250 кВт.
3. Асинхронный двигатель по схеме асинхронно−вентильного каскада
для регулируемых турбомашин.
4. Асинхронно−синхронный привод турбомашин, для которых
достаточно двух ступеней регулирования скорости.
5. Синхронный двигатель с тиристорным управлением по схеме
вентильного двигателя для модернизации действующих установок без
замены двигателя.
40. основными видами электропривода турбомеханизмов являются
Системы нерегулируемыхэлектроприводов;
• Для нерегулируемых электроприводов большой мощности применяют, как правило, синхронные двигатели, так как они могут работать в
режиме компенсации реактивной мощности. Скорость такого
электроприво-да не регулируется, номинальная мощность привода
Pном ≤30МВт . При мощностях менее 1000 кВт и при отсутствии
требований по регулированию скорости вращения исполнительного
механизма используют в качестве исполнительного двигателя –
асинхронный двигатель с короткозамкнутым ротором.
41. Системы нерегулируемых электроприводов;
Синхронный электропривод турбомашин.Преимущества применения синхронного двигателя для привода
турбомашин.
1. Возможность регулирования реактивной мощности для компенсации
снижения cos(φ) из−за влияния на питающую сеть других
потребителей.
2. Наиболее высокий КПД из всех вращающихся электрических машин.
3. Строгое постоянство скорости во всём диапазоне регулирования
нагрузок.
4. Большая надёжность, чем у асинхронных машин постоянного тока.
5. Положительное влияние на энергосистему в плане стабилизации
напряжения.
6. Важным преимуществом синхронного двигателя является
отсутствие ограничения по мощности в единице.
42. Синхронный электропривод турбомашин.
Системы регулируемых электроприводов.Возможность синхронного двигателя
регулировать реактивную мощность в
питающей сети наилучшим образом
реализуется в схеме с тиристорным
возбудителем, включённым в систему
регулирования
43. Возможность синхронного двигателя регулировать реактивную мощность в питающей сети наилучшим образом реализуется в схеме с
Синхронно–асинхронныйпривод турбомашин
44. Синхронно–асинхронный привод турбомашин
Асинхронно−вентильныйкаскад
Асинхронно−вентильный каскад применяется не только для
турбомеханизмов, но и для других механизмов с соответствующими
требованиями к электроприводу. Одним из способов регулирования
скорости асинхронного двигателя является введение в цепь ротора
добавочной ЭДС от постороннего источника. Таким источником может
быть электрическая машина или вентильный преобразователь.
В схеме вентильно−машинного каскада в роторную цепь асинхронного
двигателя включён неуправляемый выпрямитель UD, который питает
якорную цепь двигателя постоянного тока М2. Вал машины
постоянного тока соединён с валом синхронного генератора СГ.
Магнитный поток машины постоянного тока регулируется, энергия
скольжения превращается в механическую на валу машины
постоянного тока, а затем при помощи синхронного генератора
возвращается в сеть
45. Асинхронно−вентильный каскад
Схема подключения синхронного двигателя в режиме«вентильного двигателя»
Конструктивно вентильный двигатель переставляет собой синхронную машину с возбуждением
постоянного тока. Статор синхронного двигателя подключён к сети через вентильный преобразователь,
состоящий из двух комплектов вентилей. Первая группа вентилей Ud представляет собой регулируемый
выпрямитель. ЭДС на его выходе определяется величиной Uy на входе СИФУ1. Вторая группа вентилей
Uz работает как тиристорный коммутатор, управляемый датчиком углового положения ротора через
СИФУ2.
46. Схема подключения синхронного двигателя в режиме «вентильного двигателя»
Расчет мощности двигателядля вентилятора
Мощность вентилятора:
Pв ен
где
Q h
103 , кВт
в п
Q -производительность насоса м3 /с
- d -принимается для мощных вентиляторов 0,5-0,8
для центробежных вентиляторов средней мощности 0,3-0,5
для маломощных крылатых вентиляторов 0,2-0,35
h-напор развиваемый машиной Н/м2
п -КПД передачи от двигателя к вентилятору
47. Расчет мощности двигателя для вентилятора
Расчет мощности двигателядля компрессора
48. Расчет мощности двигателя для компрессора
49.
Для воздуха в атмВеличины Аиз,Аад могут быть вычислены по следующим формулам справедливым для воздуха и инертным газов
Р2 0, 285
)
1) Дж / м3
Р1
Р
Аиз 98100 Р2 ln 2 , Дж / м3
Р1
Аад 34300 Р1 ((
где Аиз-энергия изотермического сжатия
Аад-Энергия адиабатического сжатия
Р1-начальное давление,Атм
Р2-конечное давление,Атм
50. Для воздуха в атм
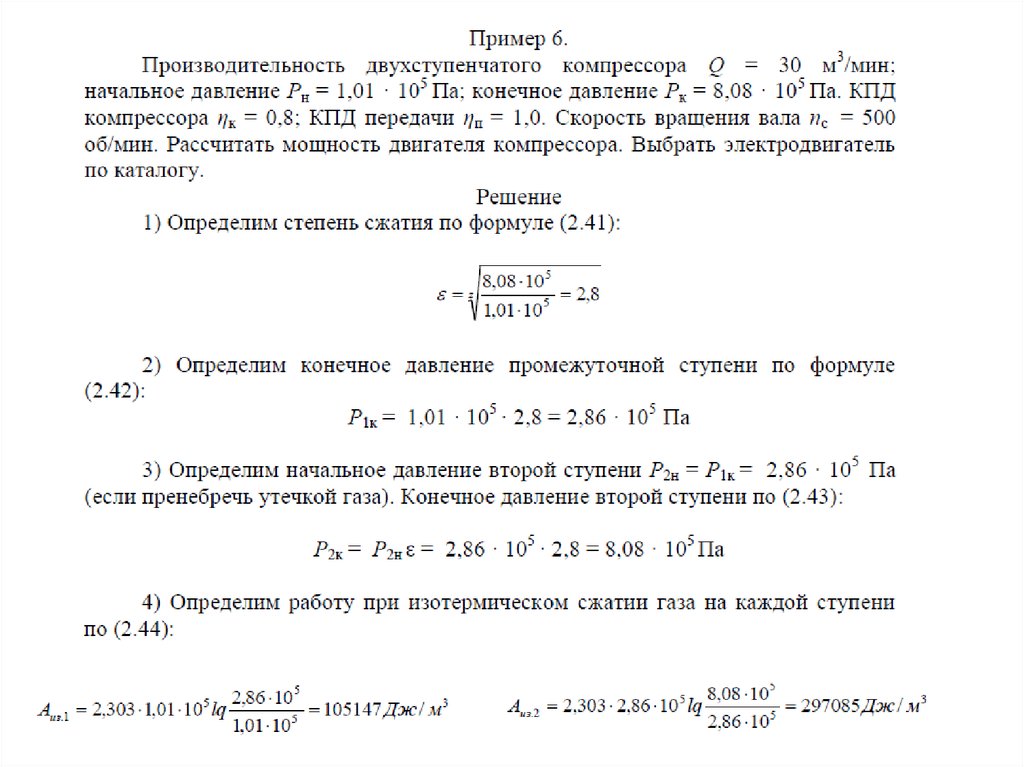
Пример51. Пример
Решение52. Решение
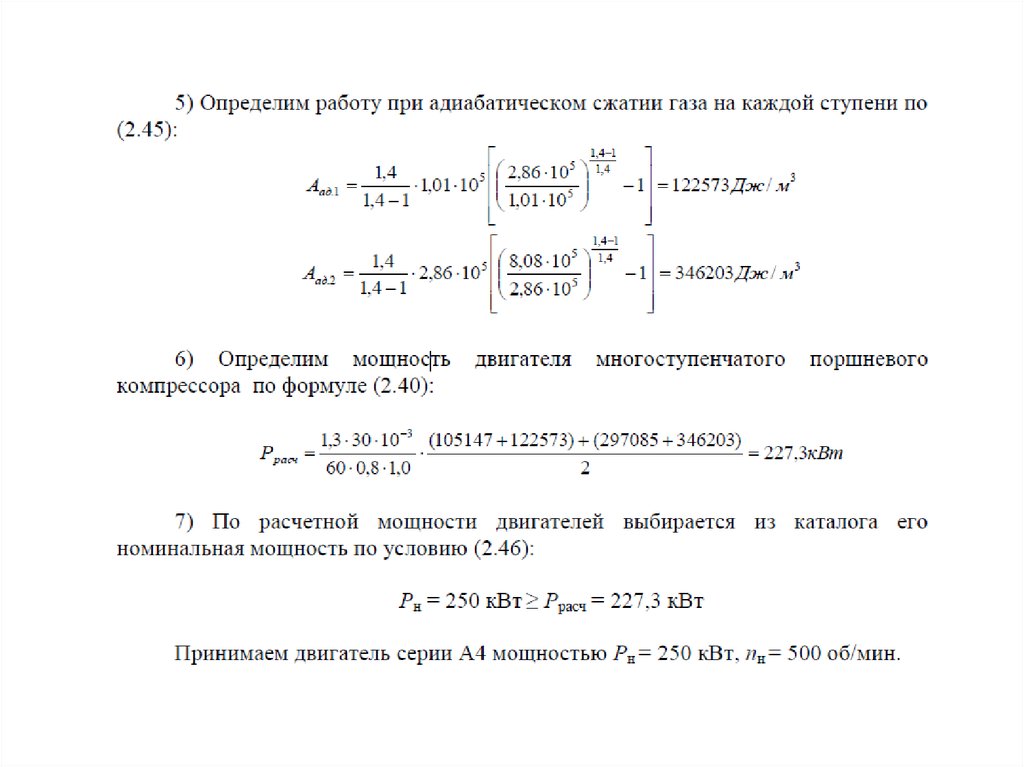
53.
54.
55.
Выбор двигателя для насоса56. Выбор двигателя для насоса
Еще формула!Мощность двигателя насоса
Pнас
где
Q ( H1 H 2 H 3 H 4 ) 3
10
нас В
-плотность перекачиваемой жидкости
Н1-высота всасывания,м(расстояние от уровня жидкости до оси насоса)
Н2-высота нагнетания (расстояние от насоса до наиболее высокого пункта потребления,м)
Н3-напор учитывающийпотери во всасывающем трубопроводе ,нагнетающем трубопроводе
на поворотах ,вентилях.Обычно принимают Н3=0,1*(Н1+Н2)
Н4-напор ,обеспечивающий определенную скорость вытекания жидкости Н 4=0,05*(Н1+Н2)
Q-производительность насоса,м3/с
В -КПД передачи от вала к двигателю
нас -принимаем для поршневых насосов 0,8-0,9
для центробежных высокого давления0,3-0,6
57. Еще формула!
58.
Требования к электроприводумашин для подачи жидкостей и
газов
продолжительный режим работы со спокойной
нагрузкой;
широкий диапазон мощностей – от сотен ватт до
нескольких десятков мегаватт;
целесообразность
регулирования
скорости
по
технологическим и энергетическим соображениям;
как правило, небольшой диапазон регулирования
скорости ;
отсутствие необходимости реверсирования в силу
особенностей
конструкции
и
условий
технологического
процесса
(исключение
составляют осевые машины, для которых
реверсирование скорости позволяет изменять
направление подачи);
отсутствие генераторного режима.
59. Требования к электроприводу машин для подачи жидкостей и газов
Усройства для автоматизациикомпрессоров
60. Усройства для автоматизации компрессоров
Технологическая и принципиальная схемакомпрессорной установки
61. Технологическая и принципиальная схема компрессорной установки
Устройства для автоматизации насосных становок62. Устройства для автоматизации насосных становок
Технологическаяи принципиальная
схема насосной
установки