

































 Электроника
Электроника Промышленность
ПромышленностьПохожие презентации:




")





Нелинейные методы адаптивного управления генераторами энергосистем
1.
Министерство образования и науки РФФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ
УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
УДК 681.511.4
№ госрегистрации 01201359117
Инв. №
УТВЕРЖДАЮ
Проректор по организации научной и
проектно-инновационной деятельности
______________И.К. Шевченко
«___» __________ 2016 г.
ОТЧЕТ
О НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЙ РАБОТЕ
по теме:
НЕЛИНЕЙНЫЕ МЕТОДЫ АДАПТИВНОГО УПРАВЛЕНИЯ ГЕНЕРАТОРАМИ
ЭНЕРГОСИСТЕМ
(заключительный)
№301*38-12/2013-35
Руководитель темы
доцент кафедры синергетики и
процессов управления,
канд. техн. наук
А.А. Кузьменко
Ростов-на-Дону 2016
2.
СПИСОК ИСПОЛНИТЕЛЕЙРуководитель темы
канд. техн. наук
_________________
А.А. Кузьменко (разделы 1–7,
введение, заключение)
Исполнители темы
доцент кафедры СиПУ,
канд. техн. наук
_________________
А.Н. Попов (разделы 2, 5)
_________________
А.С. Мушенко (раздел 1)
_________________
И.А. Радионов (раздел 3)
канд. техн. наук
_________________
А.А. Скляров (раздел 4)
аспирант кафедры СиПУ
__________________ А.С. Синицын (подраздел 6.1)
аспирант кафедры СиПУ
_________________
А.А. Синицына (подраздел 6.2)
студент кафедры СиПУ
_________________
Д.А. Колесниченко
доцент кафедры СиПУ,
канд. техн. наук
ст. препод. кафедры СиПУ,
канд. техн. наук
ассистент кафедры СиПУ,
(подраздел 7.1)
Нормоконтролер
_________________
2
Л.Н. Литвиненко
3.
РЕФЕРАТОтчет 113 с., 1 ч., 65 рис., 80 источников.
ЭНЕРГОСИСТЕМА,
СИНТЕЗ
РЕГУЛЯТОРА,
УПРАВЛЕНИЯ,
ИНВАРИАНТ-АТТРАКТОР,
НАБЛЮДАТЕЛЬ,
ГЕНЕРАТОР,
СИНЕРГЕТИЧЕСКАЯ
АДАПТИВНОЕ
ИНТЕГРАЛЬНАЯ
АДАПТАЦИЯ,
ТЕОРИЯ
УПРАВЛЕНИЕ,
ИНВАРИАНТ,
РОБАСТНОСТЬ.
Объектами исследований генераторы энергосистем – паровые турбины, турбогенераторы больших и автономных энергосистем, гидрогенераторы.
Цель работы – решение задачи разработки адаптивных законов нелинейного управления генераторами энергосистем (ЭС) с учетом нелинейности, многомерности, многосвязности и многоканальности математического описания турбо- и гидрогенераторов ЭС. Предлагаемые нелинейные законы управления синтезируются аналитически в соответствии с концепцией единства процессов самоорганизации и управления и обеспечивают выполнение основных технологических задач управления. При этом обеспечивается адаптивность к внутренним параметрическим возмущениям (изменение параметров модели и др.) и внешним
возмущениям (изменение нагрузки, негативное воздействие со стороны технологической
среды, системные колебания со стороны ЭС и др.).
Для синтеза алгоритмов управления генераторами ЭС в работе были использованы
принципы и методы синергетической теории управления (СТУ). Использование нелинейных
моделей движения рассматриваемых генераторов ЭС позволило обеспечить асимптотическую устойчивость в целом синтезируемых многомерных систем управления при решении
различных технологических задач в условиях частичной или полной неопределенности
внешней среды.
Полученные в ходе выполнения работы важнейшие результаты:
– сформированы технологические и энергетические инварианты ЭС;
– результаты исследования параметрических и внешних наихудших возмущений для
объектов ЭС: параметры, структура возмущений, условия возникновения, математические
динамические модели указанных возмущений;
– сформированы нелинейные математические модели турбо- и гидрогенераторов,
синхронных генераторов ЭС;
– метод аналитического синтеза нелинейных законов адаптивного управления генераторами ЭС, базирующихся на построении нелинейных наблюдателей возмущений синергетической теории управления;
3
4.
– результаты сравнительного анализа синергетических нелинейных адаптивных законов управления для генераторов ЭС с адаптивными законами управления, полученными методами современной теории адаптивного управления;– метод синтеза нелинейных законов адаптивного управления генераторами ЭС, базирующийся на принципе интегральной адаптации синергетической теории управления;
– результаты сравнения нелинейных адаптивных законов управления для генераторов
ЭС, полученных на основе принципа интегральной адаптации синергетической теории
управления, с адаптивными законами управления, полученными методами современной теории адаптивного управления.
Новизна проделанной работы состоит в том, что по результатам проведенного исследования системных связей и закономерностей функционирования генераторов ЭС, их качественных свойств с помощью нелинейных моделей, адекватно описывающих внутренние
процессы в широком диапазоне нагрузок, разработаны принципиально новые методы синтеза систем нелинейного адаптивного управления генераторами ЭС автономных и больших
энергосистем, совершенствующие процессы производства и потребления электроэнергии,
создающие новое поколение управляемых объектов энергосистем, превосходящих существующие с точки зрения надежности, энергоэффективности, адаптивности и т.п.
Результаты, полученные в работе, рекомендуется внедрять для обучения студентов,
магистров, аспирантов в области автоматизации и управления. Внедрение в промышленность – модернизация алгоритмов управления генераторами ЭС.
4
5.
СОДЕРЖАНИЕВВЕДЕНИЕ
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1 Проблема нелинейного управления ЭС . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Методы управления генераторами ЭС . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.1 Обзор методов управления автономными ветроустановками . . . . . . . . . . . . 16
2.2 Обзор методов управления асинхронизированными генераторами . . . . . . . . 17
2.3 Обзор методов управления синхронными генераторами . . . . . . . . . . . . . . 20
2.3.1 Типовые подходы к управлению синхронными генераторами . . . . . . . . . 20
2.3.2 Построение робастных регуляторов возбуждения . . . . . . . . . . . . . . . . 22
2.3.3 Децентрализованное робастное управление возбуждением . . . . . . . . . . . 24
2.3.4 Системы регулирования возбуждения СГ на основе методов нечеткой логики
и нейронных сетей . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.5 Энергетический подход к синтезу управления возбуждением . . . . . . . . . 30
2.3.6 Аварийное управление возбуждением СГ с использованием функций Ляпунова 32
2.3.7 Нечеткая реализация скользящих режимов . . . . . . . . . . . . . . . . . . . 34
2.4 Обзор методов управления гидротурбинами . . . . . . . . . . . . . . . . . . . . . 35
3 Системный анализ проблемы управления генераторами ЭС . . . . . . . . . . . . . 37
3.1 Наихудшие возмущения и их математические модели . . . . . . . . . . . . . . . 37
3.2 Инварианты ЭС . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4 Нелинейные математические модели генераторов ЭС . . . . . . . . . . . . . . . . . 44
5 Теоретические положения синергетического подхода к синтезу нелинейных законов управления . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.1 Процедура метода АКАР . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.2 Процедура синтеза ННВ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.3 Принцип интегральной адаптации . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6 Синергетический синтез законов адаптивного управления ЭС с ННВ . . . . . . . . 55
6.1 Нелинейное адаптивное управление турбогенератором . . . . . . . . . . . . . . . 55
6.1.1 Процедура синтеза законов адаптивного управления турбогенератором . . . 56
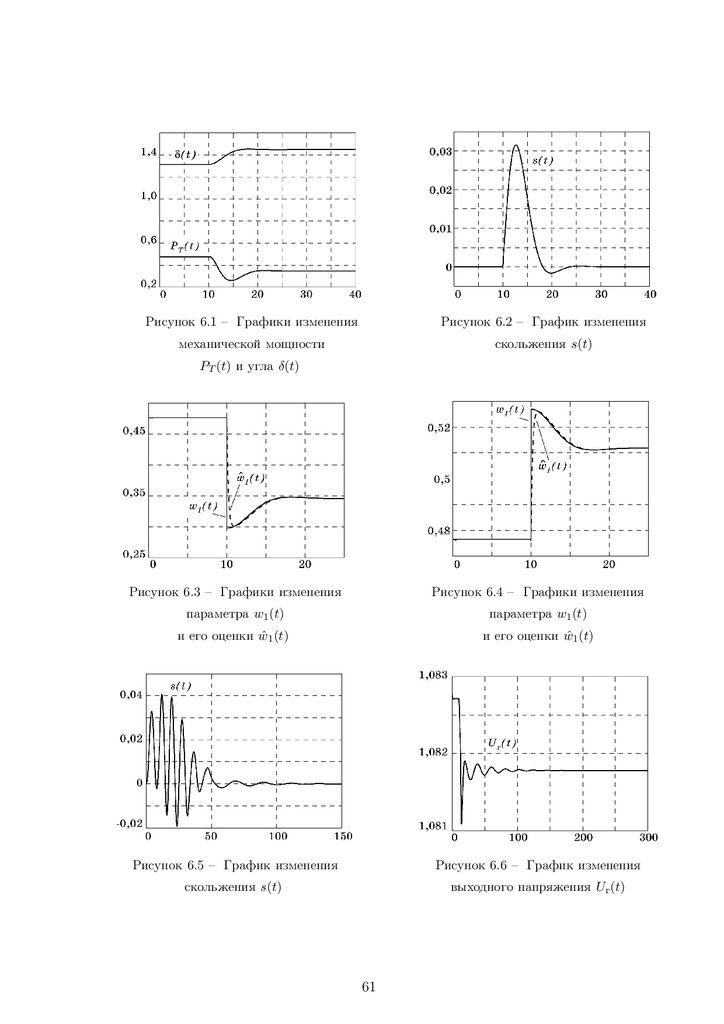
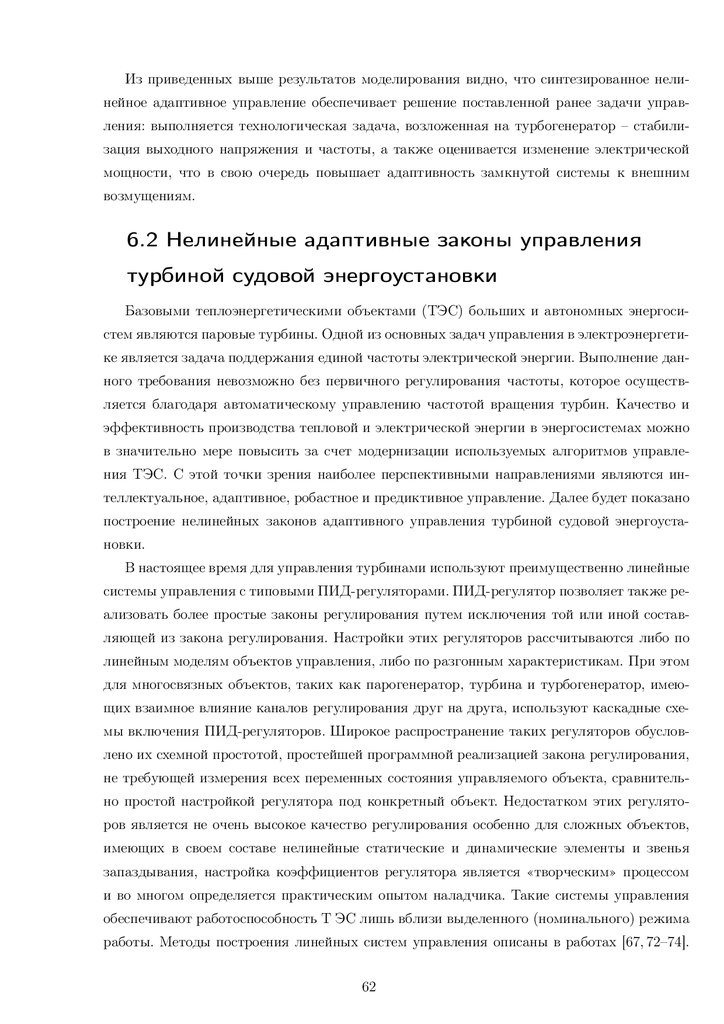
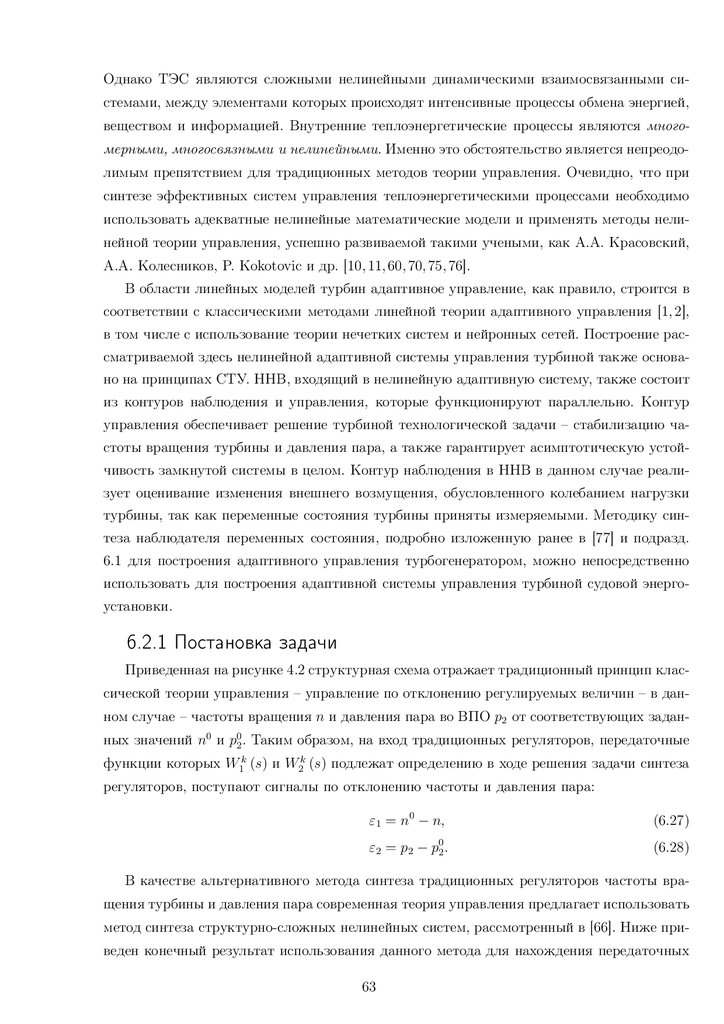
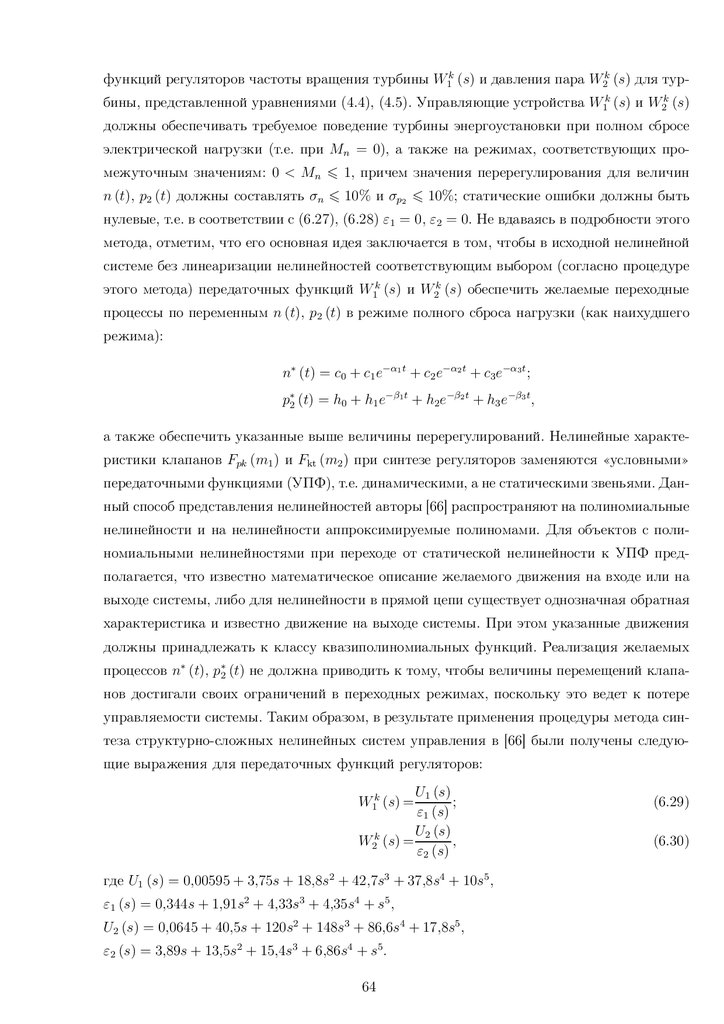
6.1.2 Результаты моделирования . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
6.2 Нелинейные адаптивные законы управления турбиной судовой энергоустановки 62
6.2.1 Постановка задачи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.2.2 Синтез законов управления . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.2.3 Синтез ННВ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.2.4 Результаты моделирования . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
7 Синергетический синтез законов адаптивного управления ЭС: интегральная адаптация . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7.1 Нелинейное адаптивное управление турбогенератором . . . . . . . . . . . . . . . 76
5
6.
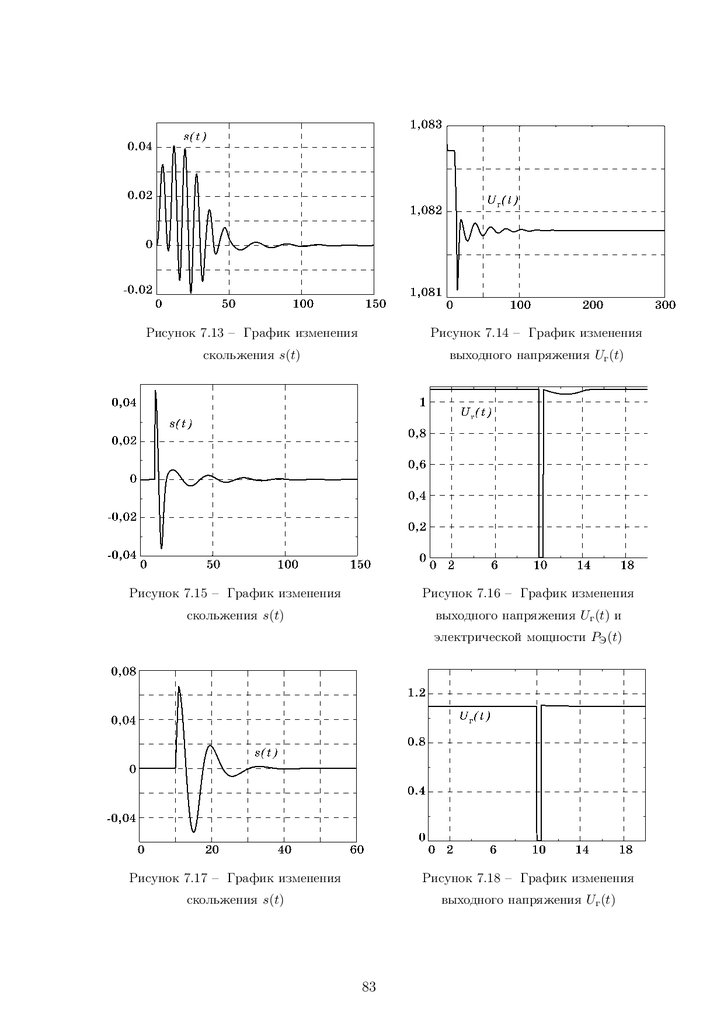
7.1.1 Процедура синтеза законов управления – подавление кусочно-постоянноговозмущения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7.1.2 Исследование инвариантности систем к кусочно-постоянному и параметрическим возмущениям . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
7.1.3 Процедура синтеза законов управления – подавление гармонического возмущения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
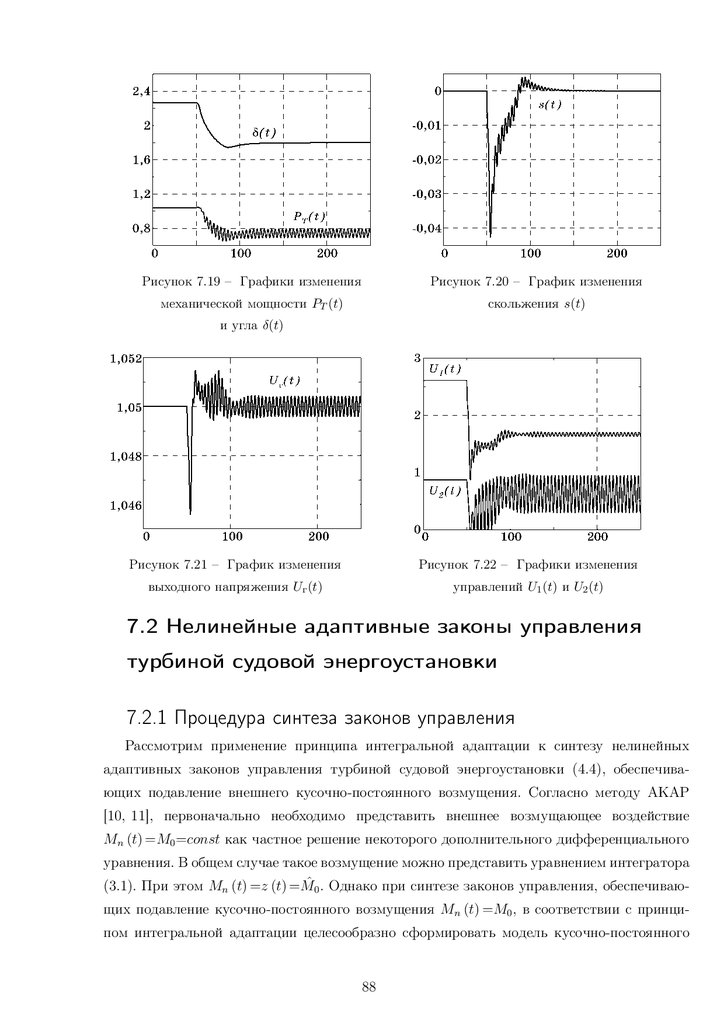
7.2 Нелинейные адаптивные законы управления турбиной судовой энергоустановки 88
7.2.1 Процедура синтеза законов управления . . . . . . . . . . . . . . . . . . . . . . 88
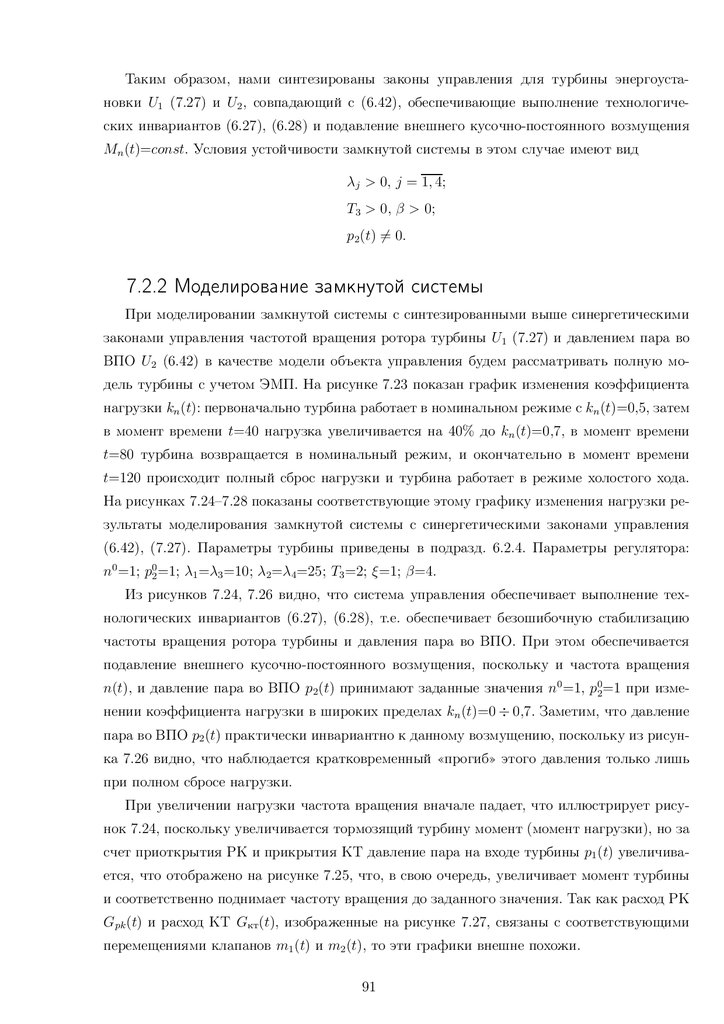
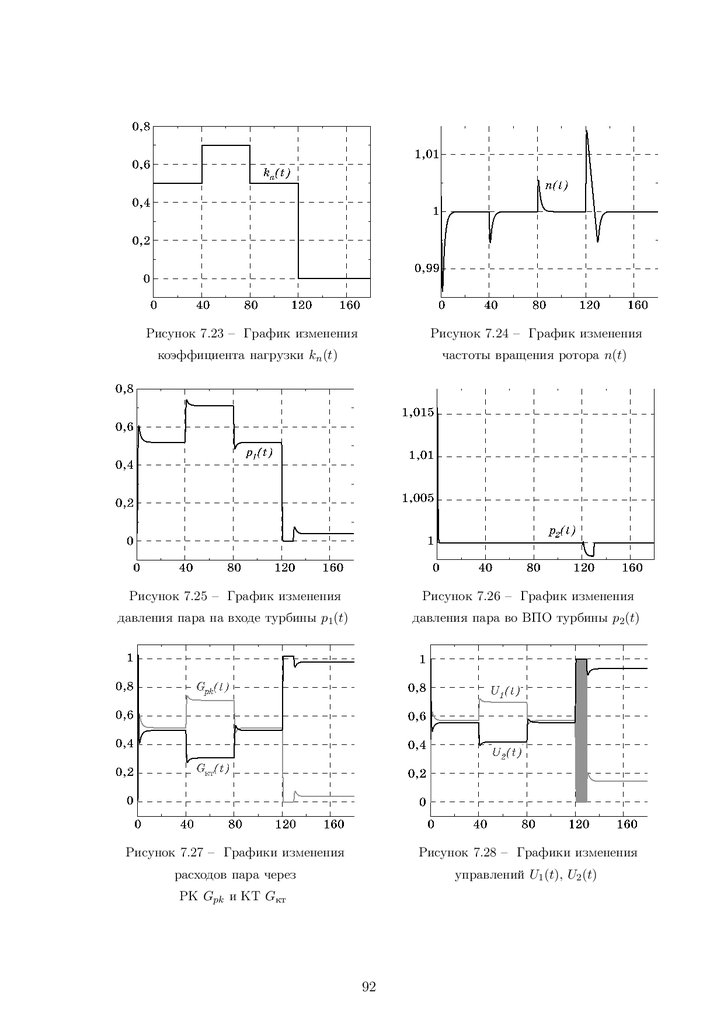
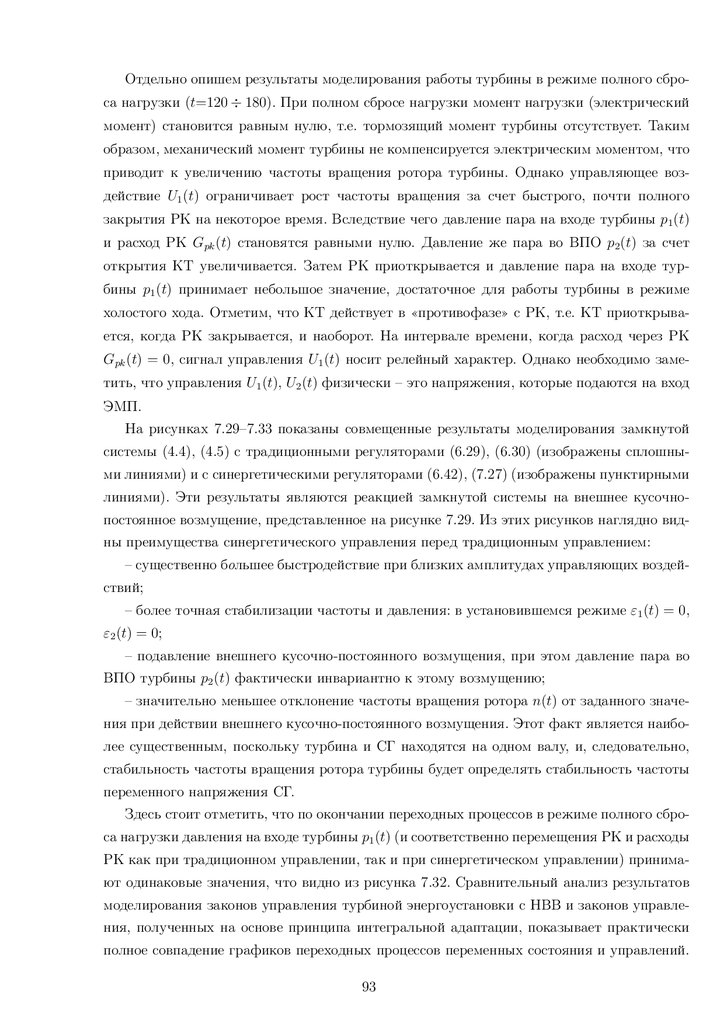
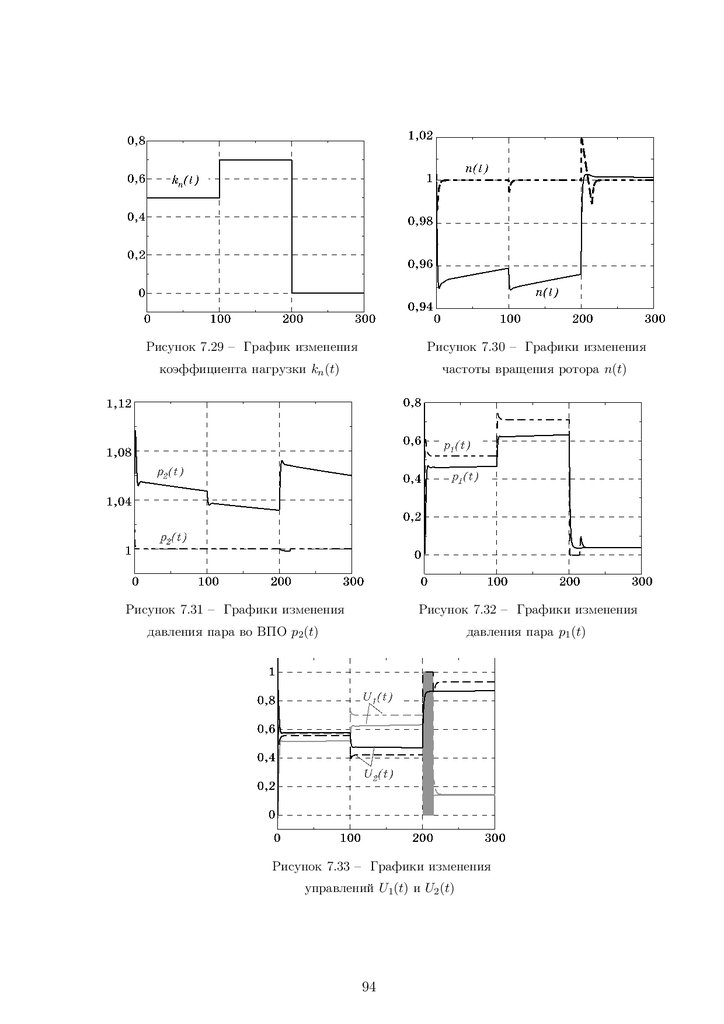
7.2.2 Моделирование замкнутой системы . . . . . . . . . . . . . . . . . . . . . . . . 91
7.3 Нелинейное адаптивное управление гидротурбиной . . . . . . . . . . . . . . . . . 95
ЗАКЛЮЧЕНИЕ
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
СПИСОК. ИСПОЛЬЗОВАННЫХ
. . . . . . . . . . . . . . ИСТОЧНИКОВ
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
6
7.
ВВЕДЕНИЕСовременные электроэнергетические системы (ЭЭС) относятся к классу ключевых,
структурообразующих компонентов современной техносферы, от устойчивого функционирования которых непосредственно зависят жизнь и развитие цивилизованного общества.
В этой связи проблема эффективного управления ЭЭС относится к числу фундаментальных научно-технических суперпроблем, остроту и важность решения которой подтверждают крупные техногенные аварии последнего времени. Дело в том, что современные
ЭЭС представляют собой комплекс различных подсистем, состоящих из различных объектов и связанных между собой процессами интенсивного динамического взаимодействия
и обмена энергией, веществом и информацией. Указанные подсистемы и ЭЭС в целом
являются нелинейными, многомерными и многосвязными, в которых протекают сложные переходные процессы и возникают критические и хаотические режимы. Проблемы
эффективного управления такими динамическими системами являются весьма актуальными, чрезвычайно сложными и практически недоступными для существующих в энергетике методов автоматического управления. Традиционные методики построения алгоритмов управления ЭЭС обычно строятся по принципу так называемой «компенсации»
нелинейностей моделей или их игнорирования, сепарирования имеющихся каналов управления, нейтрализации перекрестных связей и т.д. Подобные вынужденные искусственные
приемы, вызванные ограниченными возможностями известных методов классической теории управления, в конечном итоге, весьма негативно сказываются на способности систем
управления отвечать современным требованиям к ЭЭС с точки зрения качества производимой энергии, устойчивости ЭЭС и энергосбережения.
Улучшение статических и динамических характеристик режимов функционирования
энергосистем (ЭС) непосредственно связано с совершенствованием процессов управления
генераторами ЭС. Одной из ключевых задач является задача синтеза алгоритмов адаптивного управления генераторами ЭС — определения структуры и параметров автоматического регулятора как совокупности соответствующих обратных связей. Здесь возникают
трудности теоретического характера, связанные с необходимостью рассмотрения комплекса физических явлений, сопутствующих генерированию электроэнергии, и использования
наиболее адекватных математических моделей. Последние, в свою очередь, представляют собой системы нелинейных дифференциальных уравнений с элементами неопределенности, что делает невозможным применение традиционных методов современной теории
управления. Учет нелинейных составляющих модели поведения возможен благодаря применению методов и принципов направленной самоорганизации — новому течению в современной теории управления сложными системами — синергетической теории управления
(СТУ), развиваемой научной школой кафедры синергетики и процессов управления Южного федерального университета. Управление генераторами ЭС возможно реализовать
7
8.
на основе следующих подходов: во-первых, управлением по отдельным каналам — этоскалярный подход; во-вторых, управлением одновременно по всем каналам — это векторный подход. Разумеется, что векторный подход требует более сложной алгоритмической
структуры регулятора, однако он позволяет обеспечить существенно более высокие динамические свойства генераторов ЭС, самоорганизацию регуляторов в достижении общих
целей управления, повышение устойчивости объектов ЭС и общесистемной устойчивости
ЭС. На основе выполненного анализа методов синтеза законов управления генераторами
ЭС для решения поставленной задачи управления в проекте использован метод аналитического конструирования агрегированных регуляторов (АКАР), опирающийся на синергетическую концепцию единства процессов направленной самоорганизации и управления.
Разработанные в проекте нелинейные адаптивные законы управления генераторами ЭС
обладают следующими преимуществами:
– процедура синтеза управлений для нелинейных, многомерных, многосвязных объектов полностью аналитична;
– нет влияния «человеческого фактора» на выбор настроек регулятора, нет проблемы
«проклятия размерности»;
– анализ устойчивости замкнутой системы «объект управления – законы управления»
осуществляется для финишной декомпозированной системы, размерность которой существенно ниже размерности исходной системы.
Отличительной особенностью предложенного в НИР метода синтеза нелинейных адаптивных систем управления генераторами ЭС, базирующихся на синергетической теории
управления (СТУ), заключается в том, что он позволяет осуществлять синтез адаптивных
систем по исходным нелинейным моделям объекта без применения процедур линеаризации, сепарирования каналов управления и без построения эталонной модели (что уже
существенно упрощает структуру системы управления). При этом структура адаптивной системы синтезируется полностью в аналитическом виде. Реализация принципа интегральной адаптации основана на введение в структуру объекта интеграторов управления
через нелинейные обратные связи. В отличие от классической теории управления введение интеграторов не ухудшает устойчивость всей системы. Следует отметить, что метод
интегральной адаптации близок по своей идеологии к имеющему широкое практическое
применение методу разрывного управления (со скользящим режимом) в том смысле, что
обеспечивается робастность к внешним и параметрическим возмущениям объекта без их
идентификации (оперативной оценки).
В теории и практике проектирования адаптивных систем управления возможны три
варианта получения информации о внешних и параметрических возмущениях, оказывающих влияние на ЭС.
В первом случае исследователь имеет полную информацию о структуре и параметрах
возмущений, действующих на ЭС. Это является самым простым случаем, не требующим
8
9.
применения методов синтеза адаптивных систем управления.Во втором случае известна информация о структуре действующих возмущений, тогда для синтеза адаптивных систем управления можно применять широко развитые методы, базирующиеся на использовании «эталонной модели» и наблюдателей. При этом
следует отметить, что к настоящему времени достаточно хорошо развита теория синтеза
адаптивных систем с эталонной моделью и наблюдателями для линейных систем (Терехов В.А., Фрадков А.Л., Якубович В.А., Krstic M., Kokotovic P., Ioannou P.A., Astrom
K.J., Ortega M. и др.), однако для нелинейных систем имеются лишь отдельные подходы,
ориентированные на определенный класс объектов, и, как правило, имеющие ограничение по размерности математической модели объекта. В настоящее время адаптивность и
робастность нелинейных систем обеспечиваются за счет совместного использования традиционных линейных регуляторов и методов H∞ -управления, методов теории нечетких
систем или искусственных нейронных сетей. Следует отметить, что известные технологии
интеллектуального управления, как правило, опираются на т.н. типовые (например, линейные ПИД-пропорционально-интегрально-дифференциальные и др.) законы управления и
сводятся к текущей подстройке параметров этих законов в зависимости от внутренних и
внешних условий функционирования системы. Очевидно, что такой подход малопродуктивен для задач управления нелинейными многомерными и многосвязными динамическими
объектами, поскольку количество правил растет экспоненциально с увеличением количества переменных состояния объекта управления.
В третьем случае исследователь не имеет никакой информации о действующих возмущениях.
Полученный в НИР метод аналитического синтеза нелинейных законов адаптивного
управления генераторами ЭС с нелинейными наблюдателями возмущений, обладает следующими характерными особенностями, которые отличают их от современных аналогов
- методов теории адаптивного управления:
– непосредственный учет естественных нелинейных свойств генераторов ЭС, математические модели которых являются нелинейными, многомерными и многосвязными;
– адаптивность к действию внешних возмущающих факторов на генераторы ЭС со
стороны внешней среды - динамическое наблюдение (оценивание) неизмеряемых внешних
возмущений и их компенсацию;
– динамическое наблюдение (оценивание) неизмеряемых параметров и переменных состояния генераторов ЭС;
– более простая структура управления адаптивной системы по сравнению с системами
с эталонной моделью;
– аналитичность процедуры синтеза без ограничений на количество каналов управления и размерность объекта управления;
– асимптотическая устойчивость генераторов ЭС.
9
10.
Поскольку характерной чертой нелинейных динамических объектов является их структурная и параметрическая неопределенность, то другим наиболее распространенным способом повышения адаптивности таких объектов являются методы робастного управления.Из этих методов наилучшую практическую эффективность показали методы теории систем с разрывным управлением (скользящим режимом), в которых за счет организации
скользящего режима движения изображающей точки объекта можно обеспечить малую
чувствительность к изменению параметров объекта без их оценки. Эта теория развита в
работах С.В. Емельянова, В.И. Уткина и их учеников. В современной научной литературе по управлению этим методам посвящено значительное количество фундаментальных
и прикладных работ. Развитие теории систем с разрывным управлением привело к созданию и широкому использованию скользящих режимов высокого порядка, интегральных
скользящих режимов, робастных наблюдателей со скользящим режимом, нечетких и нейросетевых систем управления со скользящим режимом. Такое разнообразие не может не
говорить об эффективности данного направления. Разработанный нами в проекте метод
интегральной адаптации близок по своей идеологии к методу с разрывным управлением в
том смысле, что обеспечивается робастность к внешним и параметрическим возмущениям
объекта без их идентификации (оперативной оценки), т.е. обеспечивается адаптивность к
возмущениям, известным до класса. Но метод интегральной адаптации обладает рядом
принципиально важных преимуществ по сравнению с методами синтеза систем с разрывным управлением:
– увеличение размерности объекта управления не усложняет процедуру аналитического синтеза законов управления;
– увеличение количества каналов управления принципиально упрощает достижение
желаемых целей управления и расширяет возможности системы управления;
– сигналы управления в системах со скользящим режимом являются разрывными и
имеют форму, подобную двуполярному меандру с высокой частотой переключения полярности, а сигналы управления, полученные методом интегральной адаптации, являются
гладкими и не имеют разрывов. Это расширяет их использование в системах управления некоторыми объектами, например, силовыми приводами, в которых использование
разрывных управлений ограничено ввиду возникающих вибраций;
– значительно упрощается задача анализа устойчивости замкнутой системы с синтезированными законами управления. Так как движение любой нелинейной диссипативной
системы имеет два основных этапа — этап переходного движения, когда ее траектории
устремляются к аттрактору, и этап асимптотического движения на желаемом аттракторе
— цели системы, то в нашем случае обеспечение устойчивости также выполняется в два
этапа: анализ и обеспечение устойчивости основных функциональных уравнений СТУ;
анализ и обеспечение устойчивости финишной декомпозированной системы, размерность
которой существенно меньше размерности исходной системы.
10
11.
Основу предложенной нелинейной адаптивной системы управления составляет наблюдатель, который осуществляет оперативное оценивание неизмеряемых внешних возмущений. Наблюдатель состоит из контуров наблюдения и управления, которые функционируют параллельно. Контур управления обеспечивает решение объектом управления технологической задачи — вывод объекта на целевые аттракторы (инвариантные многообразия),а также гарантирует асимптотическую устойчивость замкнутой системы в целом. Контур
наблюдения реализует оценивание возмущений. В соответствии с основными положениями
СТУ процедура синтеза нелинейного адаптивного управления состоит из трех этапов:
– синтез методом АКАР законов нелинейного управления, ориентированных на реализацию требуемой технологической задачи. При этом предполагают, что все переменные
состояния возмущений наблюдаемы, а возмущения, действующие на систему, заменены их
динамическими моделями;
– синтез наблюдателя для ненаблюдаемых переменных (переменных состояния моделей
возмущений, объекта);
– замена ненаблюдаемых переменных, присутствующих в законах управления, их оценками, полученными на предыдущем этапе.
В работе также предложен подход альтернативный построению наблюдателей, обеспечивающий адаптивность ЭС к внешним и параметрическим возмущениям — метод проектирования нелинейных законов адаптивного управления генераторами ЭС, основанный
на принципе интегральной адаптации СТУ. Этот подход позволяет при минимальной информации о структуре внешних и параметрических возмущениях построить нелинейные
законы управления, которые обеспечивают желаемые динамические свойства управляемых объектов (вывод объекта на желамые целевые аттракторы) при наиболее неблагоприятных — наихудших возмущающих воздействиях, компенсацию этих возмущений и
асимптотическую устойчивость ЭС.
11
12.
1 Проблема нелинейного управления ЭСТрадиционные алгоритмы управления ЭЭС сложились более полувека назад и используются поныне, хотя они явно устарели. Несомненно, что в свое время они показали свою
эффективность, но их применение во все более развивающейся и расширяющейся структуре ЕЭС России порождает свои проблемы и требует их незамедлительного решения.
Перечислим эти проблемы.
– Линейные регуляторы сужают область динамической устойчивости ЭЭС. В настоящее время системы управления ЭС ЭЭС, как правило, проектируются в виде отдельных
линейных подсистем. Линеаризованные системы адекватны только в небольшой области
отклонения от установившегося состояния. В пиковых и экстремальных ситуациях, когда ЭС работают в режимах больших отклонений, начинают значительно проявляться
их нелинейные свойства, неучет которых способствует возникновению и развитию системных аварий. Это означает, что для эффективного управления, обеспечивающего, по
крайней мере, сохранение асимптотической (динамической) устойчивости энергосистемы,
необходимо рассматривать нелинейные модели ЭС и производить проектирование систем
управления новыми методами, которые в наиболее полной мере позволяют учесть явления
взаимосвязанности и нелинейности процессов в ЭС.
Основной недостаток традиционных автоматических регуляторов возбуждения (АРВ)
синхронных генераторов (СГ) заключается в том, что параметры этих регуляторов фиксированы и рассчитаны для определенного локального режима. Это обстоятельство приводит к тому, что не учитывается многорежимность функционирования генераторов. Таким
образом, параметры АРВ, рассчитанные для одного режима, не обеспечат качественное
регулирование в другом режиме, а могут даже существенно ухудшить статические и динамические свойства ЭЭС. Преодолеть указанный недостаток, связанный с фиксированностью параметров линейных АРВ для локальных режимов, в настоящее время пытаются,
используя преимущественно методы нечеткой логики. Причем в большинстве случаев настройки регуляторов выбираются на основании опытных знаний экспертов, общих представлений о физике протекания процессов или методом проб и ошибок. Подобный подход
никак не гарантирует нахождения оптимальных настроек регулятора, в сильной степени
зависит от человеческого фактора и к тому же требует больших временных затрат.
– Работа в экстремальных режимах. Большие возмущения режимов поведения ЭЭС
вызываются отключениями мощных нагрузок или трансформаторов, линий электропередачи (ЛЭП) и т.д. К еще более резким изменениям режима работы ЭЭС приводят короткие
замыкания (КЗ), которые в зависимости от места и вида могут вызывать критические изменения передаваемой мощности, резкие сбросы мощности и выпадение генераторов из
синхронизма. Особое место среди экстремальных режимов работы ЭЭС занимают лави-
12
13.
на частоты и напряжения, вызванные снижением генерируемой мощности при снижениичастоты. Традиционными методами предотвращения этих явлений являются, во-первых,
использование имеющегося в ЭЭС резерва мощности, и, во-вторых, отключение части
нагрузки (автоматическая частотная разгрузка или сбрасывание нагрузки). В то же время этих явлений также можно избежать, если использовать нелинейное взаимосвязанное
управление частотой и мощностью турбогенераторов.
– Разделение каналов управления ЭС. Взаимодействие каналов управления СГ и турбиной особенно усиливается в пиковых и аварийных ситуациях ЭЭС, когда эти ЭС работают в экстремальных режимах. В практике сложилось так, что при традиционных
алгоритмах управления подсистемы генератора и турбины являются развязанными, т.е.
локальными. Однако исследование управляемости турбогенераторов по их нелинейным
моделям, проведенное на основе условий общности положения принципа максимума, показало, что использование двухканального взаимосвязанного управления турбогенераторами позволяет существенно повысить динамические свойства ЭЭС и расширить область
динамической устойчивости. Еще более 30 лет назад в своих работах профессор В.А. Веников указывал на необходимость именно взаимосвязанного управления: «...аварийное регулирование турбин дает существенный эффект лишь в том случае, если оно осуществляется в тесной взаимосвязи с регулированием возбуждения турбогенератора (форсирование возбуждения, развозбуждение, демпфирование колебаний). Поэтому необходимо
одновременное согласование управления возбуждением турбогенератора и механической
мощностью его турбины от одного комплексного управляющего устройства». К сожалению, до сих пор подобные устройства не реализованы и поэтому зачастую возникают
ситуации, когда действия каналов управления вступают в явные противоречия друг с
другом, что может существенно снизить устойчивость ЭЭС.
– Возникновение системных аварий. В ЭЭС возможны возмущения, которые приводят
к возникновению явления электромеханического резонанса. Это, в свою очередь, может
привести к нарушению устойчивости ЭЭС, асинхронному ходу и развитию системной аварии, которая может перекинуться на ЭЭС соседних регионов ЕЭС России и стран СНГ.
Такого рода системные аварии наносят значительный экономический ущерб стране.
Таким образом, указанное явление приводит к необходимости постановки и решения
новой сложной проблемы построения регуляторов для турбогенераторов, обеспечивающих подавление наихудших возмущений, действующих со стороны энергосистемы, с целью
обеспечения максимально возможной области асимптотической (динамической) устойчивости ЭЭС. Эта задача, в первую очередь, эффективно решается путем построения соответствующих синергетических алгоритмов управления ЭС по их наиболее полным нелинейным моделям.
– Параметрическая неопределенность. Любая сложная ЭЭС характеризуется наличием ряда неопределенностей: неточное описание математической модели, неконтролируемое
13
14.
изменение статических и динамических свойств, воздействие на систему внешних возмущений и др. Существенным может быть также отличие фактических параметров генераторов от расчетных, которые обычно даются фирмой-изготовителем только ориентировочно(расхождения до ±15% и более).
Классические системы автоматического управления содержат фиксированные настроечные параметры и имеют жесткую структуру. Наличие же различного рода неопределенностей в объекте управления, изменения конфигурации сети (подключение или отключение потребителей или СГ), возникновение аварийных ситуаций определило необходимость
построения адаптивных систем управления с целью уменьшения неопределенностей реального процесса и реализующих адаптивность к изменению параметров и действию внешних
возмущений. В области линейных моделей СГ и турбин адаптивное управление, как правило, строится в соответствии с классическими методами линейной теории адаптивного
управления [1, 2].
В настоящее время адаптивность систем управления обеспечивается за счет использования традиционных линейных регуляторов и методов теории нечетких систем управления [3,4] или искусственных нейронных сетей, в том числе с использованием генетических
алгоритмов [5–8]. Однако в нечетких системах возникает проблема «проклятия размерности» – число правил пропорционально степени числа входных переменных. Это в свою
очередь ведет к «. . . трудности восприятия и объяснения» [6]. К тому же «. . . в большинстве работ настройки [линейных] регуляторов выбираются на основании опытных
знаний экспертов, общих представлений о физике протекания процессов или методом
проб и ошибок. Подобный подход не гарантирует нахождения оптимальных настроек
регулятора, в сильной степени зависит от человеческого фактора. . . » [6].
В [9] говорится также, что «. . . адаптивное управление должно учитывать различие в
поведении и условиях оптимальной работы ЭЭС в нормальном и возмущенном режимах.
В нормальном режиме для обеспечения статической взаимопомощи систем необходимо, по возможности, минимизировать вмешательство устройств управления в работу
системы. В возмущенном режиме в некоторых случаях необходима предельно быстрая
реакция системы управления с тем, чтобы избежать значительного отклонения частоты. . . ».
Из существующих методов синтеза адаптивных регуляторов применительно к задачам
управления ЭЭС автор [9] выделяет следующие:
– классические адаптивные, имеющие основной контур управления и контур адаптации, причем контур адаптации служит, как правило, для подстройки параметров;
– грубые регуляторы, синтезируемые на основе обеспечения требований робастной
устойчивости;
– адаптивные регуляторы, разработанные на основе методов функционального анализа;
– грубые регуляторы, разработанные на основе интервальных функций Ляпунова.
14
15.
Наибольшее применение нашли адаптивные методы первой группы. В таких системах при построении основного контура управления в ЭЭС, как правило, используютсялинейные методы, такие как модальное управление, локально-оптимальное управление,
оптимальное управление, а для подстройки параметров в контуре адаптации используются следующие методы: метод рекуррентных целевых неравенств, метод стохастической
аппроксимации, метод скоростного градиента и др.
Таким образом, в современной ситуации, обусловленной высокой степенью развития
вычислительной, микропроцессорной и информационно-измерительной техники, для решения перечисленных выше проблем следует переходить на принципиально новые синергетические алгоритмы управления ЭЭС, которые учитывают следующие особенности ЭС
ЭЭС:
– структурную сложность, проявляющуюся в многомерности, многосвязности и параметрической неопределенности;
– многорежимность функционирования, связанную с существенным изменением нагрузок и изменением конфигурации сети;
– сильное проявление в переходных и экстремальных режимах нелинейных свойств
объектов ЭЭС, что приводит к существенным погрешностям расчетов и даже к качественным искажениям результатов.
В результате построения синергетических регуляторов формируется естественная совокупность своего рода управляющих «матрешек», ответственных за решение своих собственных задач и динамически взаимодействующих друг с другом, обеспечивающих в
целом принципиально новые свойства системам управления процессами генерации электроэнергии, а именно:
– гарантированное выполнение ЭС ЭЭС и их группами возложенных на них технологических задач как в нормальных, так и в экстремальных режимах работы;
– обеспечение максимально возможной области динамической (асимптотической)
устойчивости систем управления и, как следствие, их высокую надежность работы в любых экстремальных режимах;
– повышенная грубость (робастность) системы к изменению ее параметров;
– компенсация наихудших возмущений;
– адаптивность (приспособляемость) к изменению внутренних параметров и действию
внешних возмущений со стороны технологической среды;
– гибкость и оперативная перенастройка при изменении задач и приоритетов в ЭЭС.
В отчете рассмотрены методы построения нелинейных адаптивных законов управления ЭС ЭЭС, базирующиеся на методе АКАР синергетической теории управления
(СТУ) [10–12]: метод, в основе которого лежит построение оценок возмущений посредством ННВ, и метод, в основе которого лежит построение гарантирующих регуляторов
в соответствии с принципом интегральной адаптации, обеспечивающих подавление
возмущений без их оценивания.
15
16.
2 Методы управления генераторами ЭС2.1 Обзор методов управления автономными
ветроустановками
Ветрогенераторы считаются экономичным способом поставки электроэнергии в такие
районы, где прокладка центральной энергосети является невыгодной, в силу труднопроходимой местности, либо в силу природных факторов [13, 14]. Тем не менее, энергия такого рода имеет стохастический характер в силу изменчивости силы ветра. Для решения
данной проблемы используют гибридные автономные ветроустановки (АВУ), в которых
ветрогенераторы часто объединяют в одну энергосеть с, например, дизельными генераторами. Дизельные генераторы в силу своей надежности, дешевизны и простоты транспортировки являются оптимальным решением. Ветродизельные установки являются крайне
надежными, так как дизельный генератор демпфирует изменения энергии в сети.
В качестве преобразователя энергии ветра в электрическую используются асинхронный генератор, асинхронизированные генераторы, синхронные генераторы с постоянными магнитами, индукционные генераторы и др. [15]. Основным недостатком асинхронного
генератора является его потребность в реактивной мощности для нормального функционирования. Разброс генерируемой энергии а зависимость от реактивной мощности может
привести в серьезным колебаниям напряжения на выводах генератора, что может сказываться на качестве поставляемой энергии или даже привести к нарушению стабильности
системы при отсутствии должного управления напряжением. В качестве эффективного решения данной проблемы был предложен статический компенсатор реактивной мощности
(СКРМ) АВУ [16]. В работе [17] СКРМ был использован для стабилизации напряжения и
предотвращения лавинного нарастания напряжения в энергосистемах. Кроме того, в работе [18] показано эффективное применение СКРМ в качестве средства повышения динамической устойчивости энергосистемы. В частности и в работах [19–21] СКРМ используется
для управления терминальным напряжением ветродизельных гибридных системах в силу
рассогласования между генерацией реактивной мощности и нагрузкой. В этих работах
основное управляющее устройство – это ПИ-регулятор напряжения совместно с СКРМ,
оптимизированным по методу Ляпунова. Такая комбинация демонстрирует достаточно
удовлетворительное качество управления. Несмотря на то, что параметры СКРМ являются оптимальными, этого нельзя сказать о параметрах автоматического регулятора возбуждения (АРВ), установленного в системе возбуждения дизельного генератора, которые
являются фиксированными. В силу этого невозможно гарантировать слаженного управления между СКРМ и АРВ и в дальнейшем одновременная оптимизация не ожидается.
16
17.
Кроме того, в этих работах при оптимизации не принимаются во внимание неопределенности, такие как изменение параметров генераторов или нагрузки. В результате не гарантируется устойчивость СКРМ в условиях неопределенности. Регулятор в данном случаене сможет поддерживать устойчивость системы.
Для повышения робастной надежности ПИ-регулятора АВУ используется H∞ -метод
[22]. Полученные в результате законы уп