















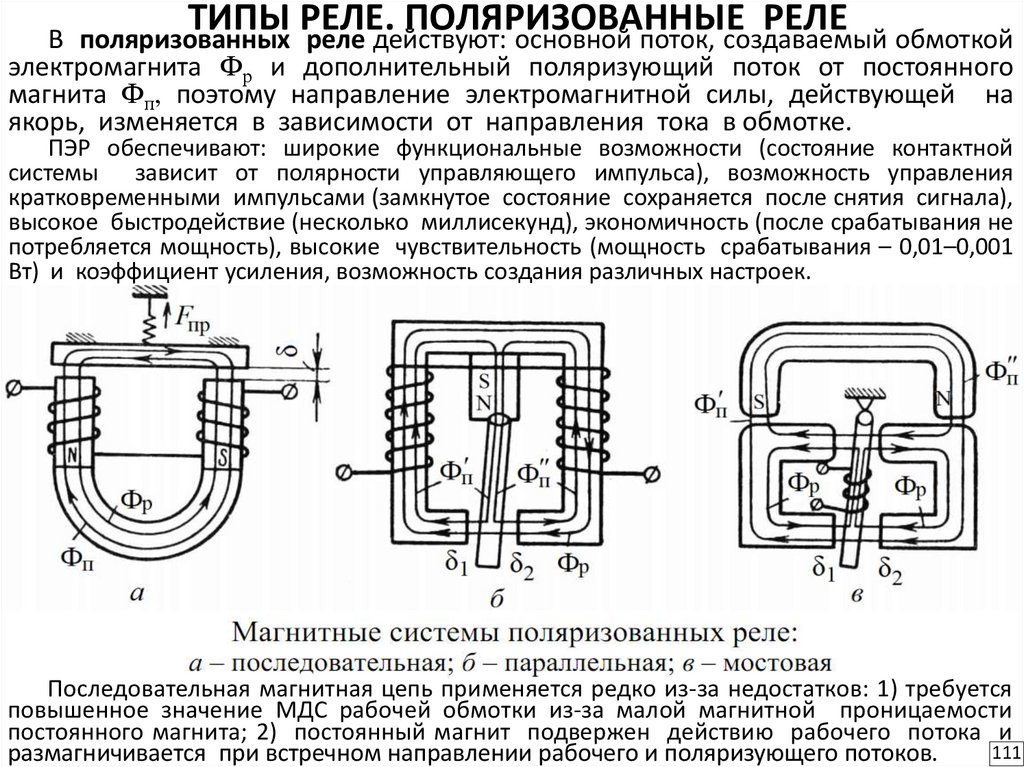
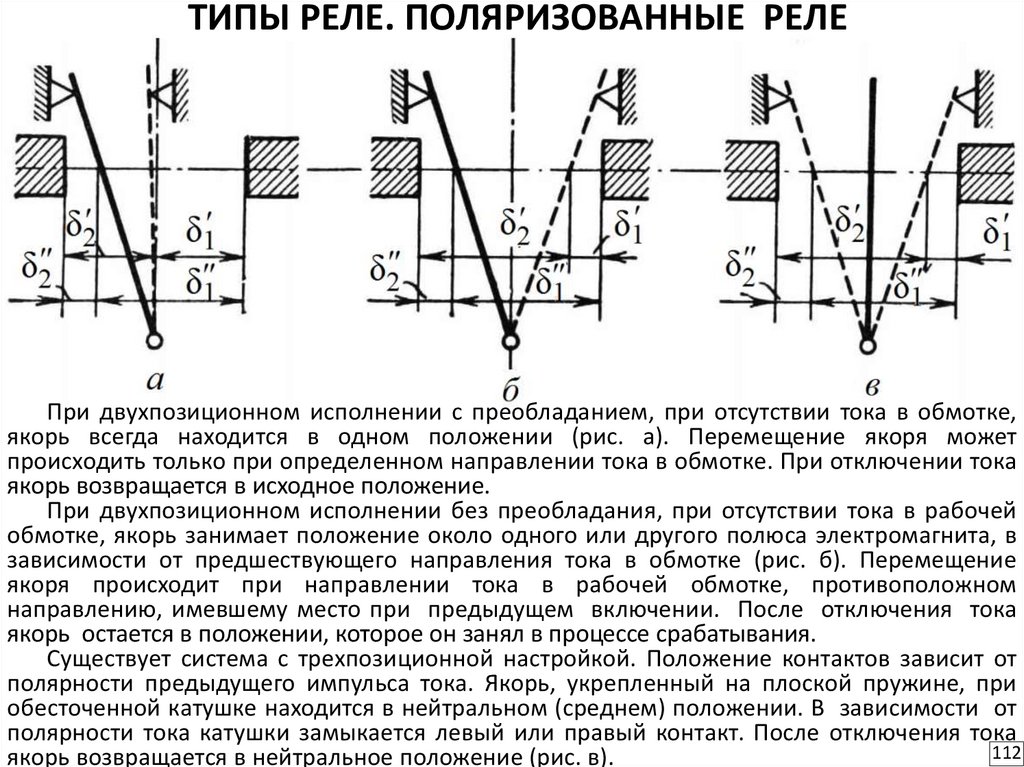






 Электроника
ЭлектроникаПохожие презентации:










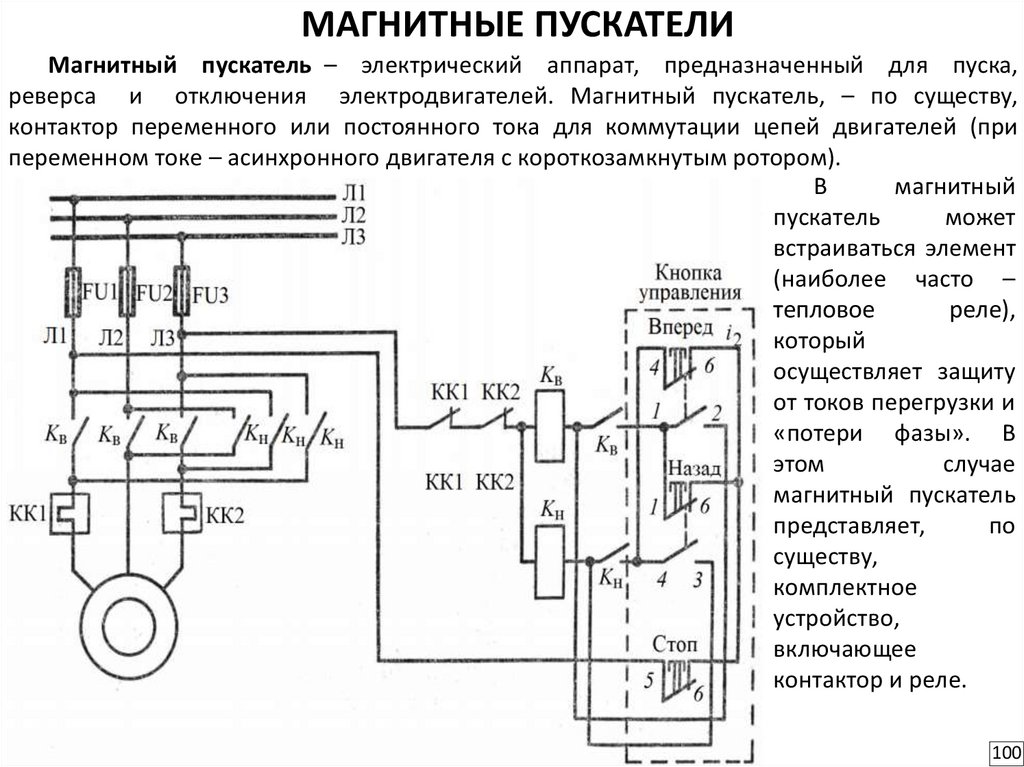
Электрические аппараты (ЭА)
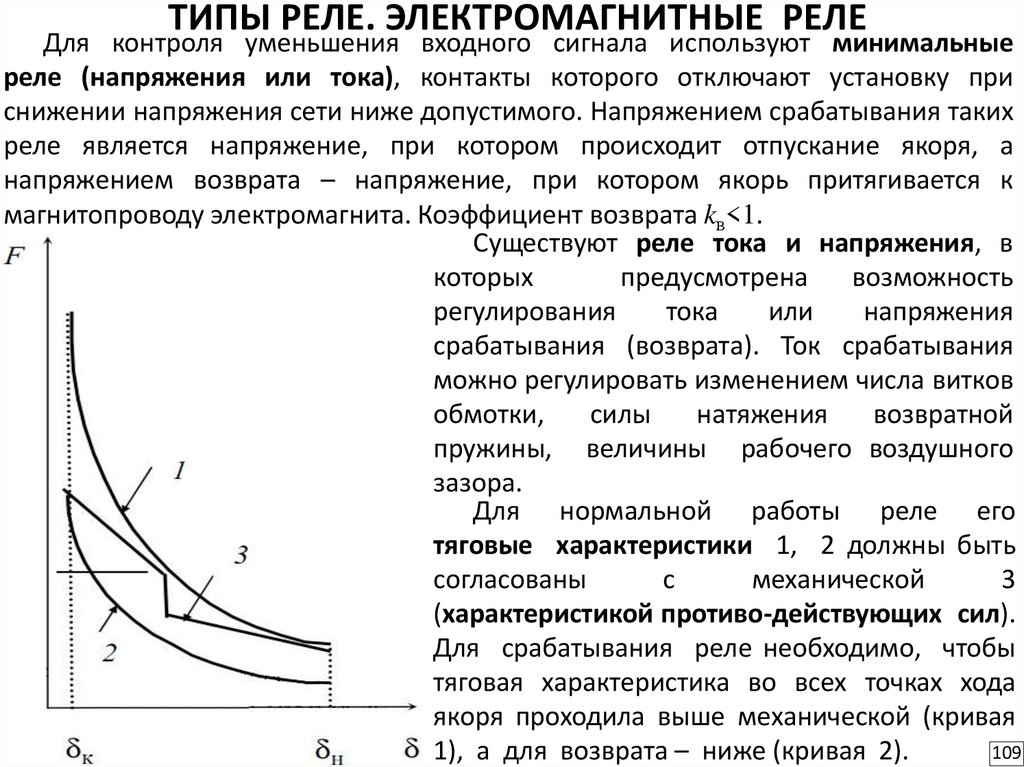
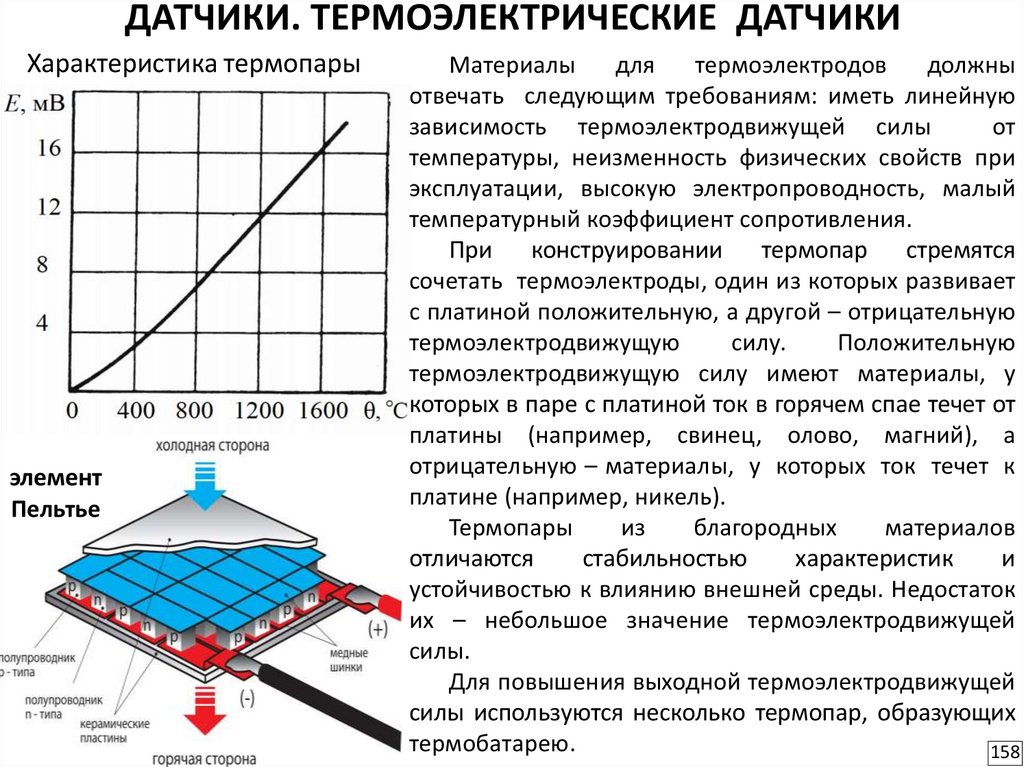
1.
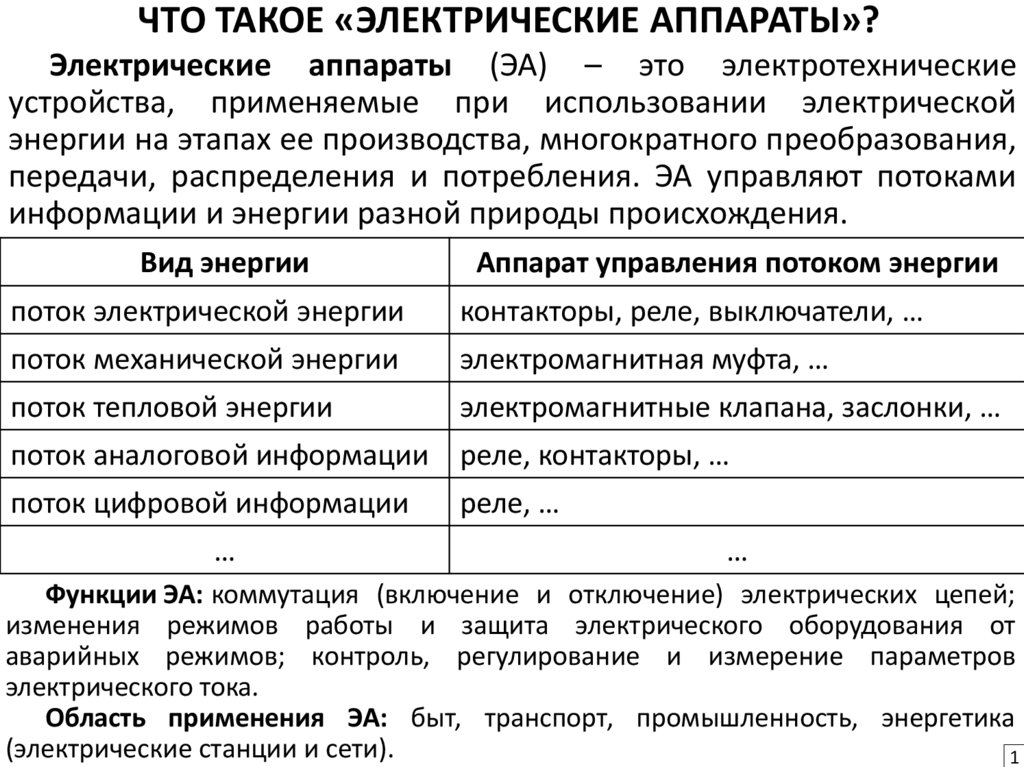
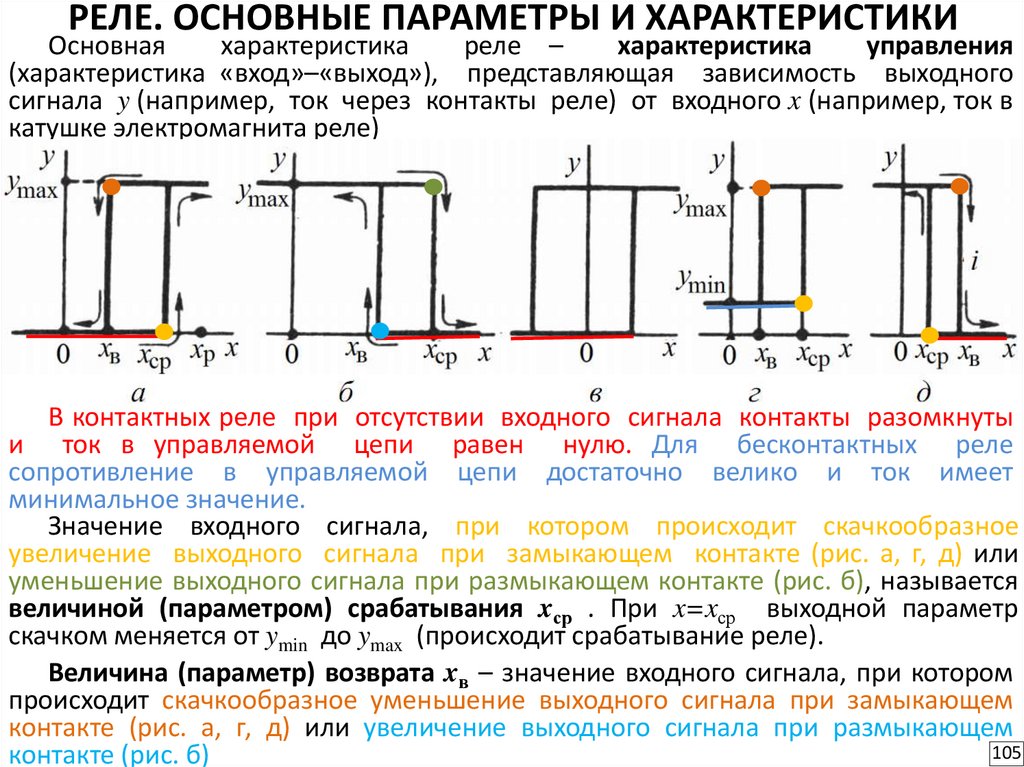
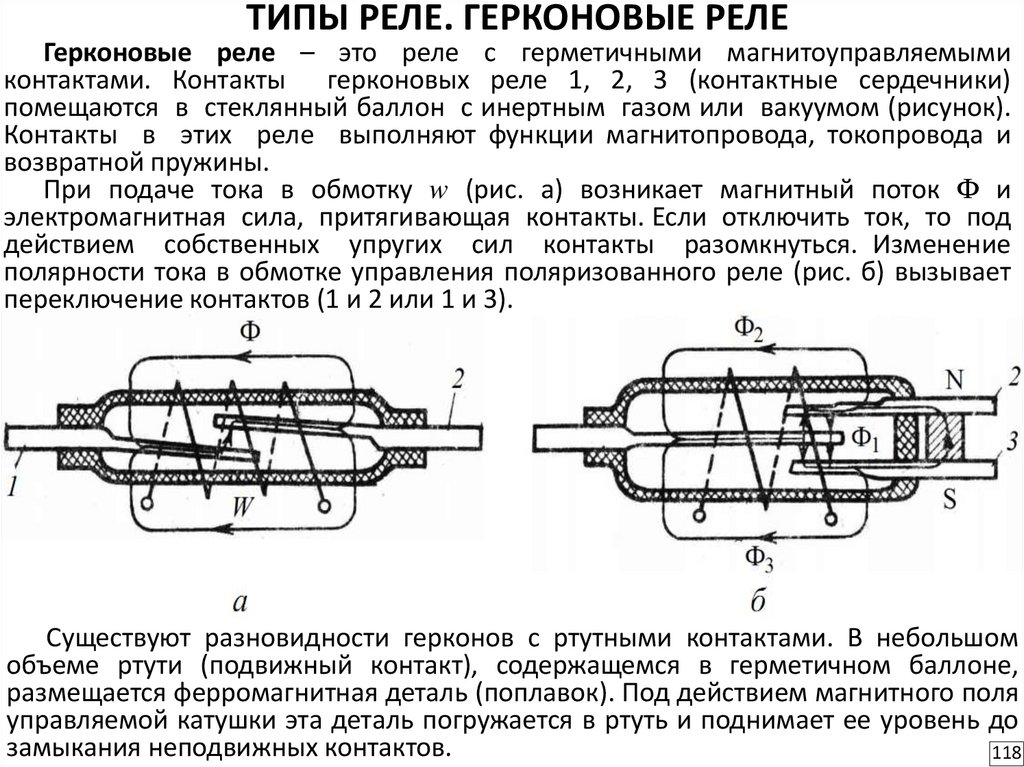
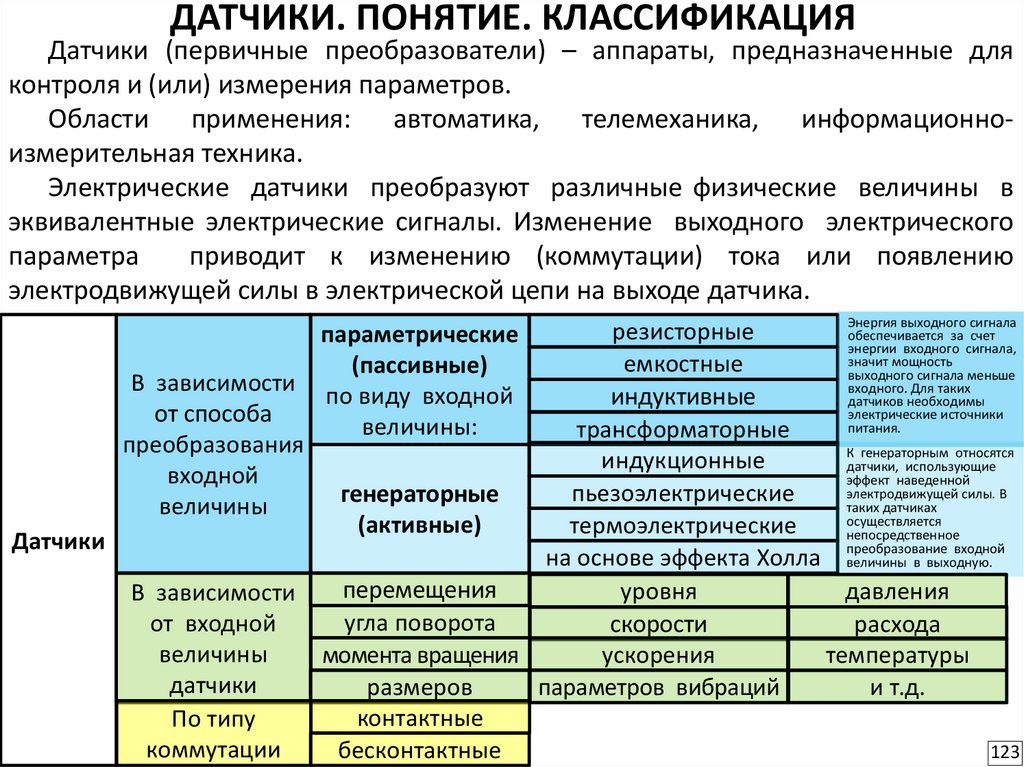
ЧТО ТАКОЕ «ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ»?Электрические аппараты (ЭА) – это электротехнические
устройства, применяемые при использовании электрической
энергии на этапах ее производства, многократного преобразования,
передачи, распределения и потребления. ЭА управляют потоками
информации и энергии разной природы происхождения.
Вид энергии
Аппарат управления потоком энергии
поток электрической энергии
контакторы, реле, выключатели, …
поток механической энергии
электромагнитная муфта, …
поток тепловой энергии
электромагнитные клапана, заслонки, …
поток аналоговой информации реле, контакторы, …
поток цифровой информации
…
реле, …
…
Функции ЭА: коммутация (включение и отключение) электрических цепей;
изменения режимов работы и защита электрического оборудования от
аварийных режимов; контроль, регулирование и измерение параметров
электрического тока.
Область применения ЭА: быт, транспорт, промышленность, энергетика
(электрические станции и сети).
1
2.
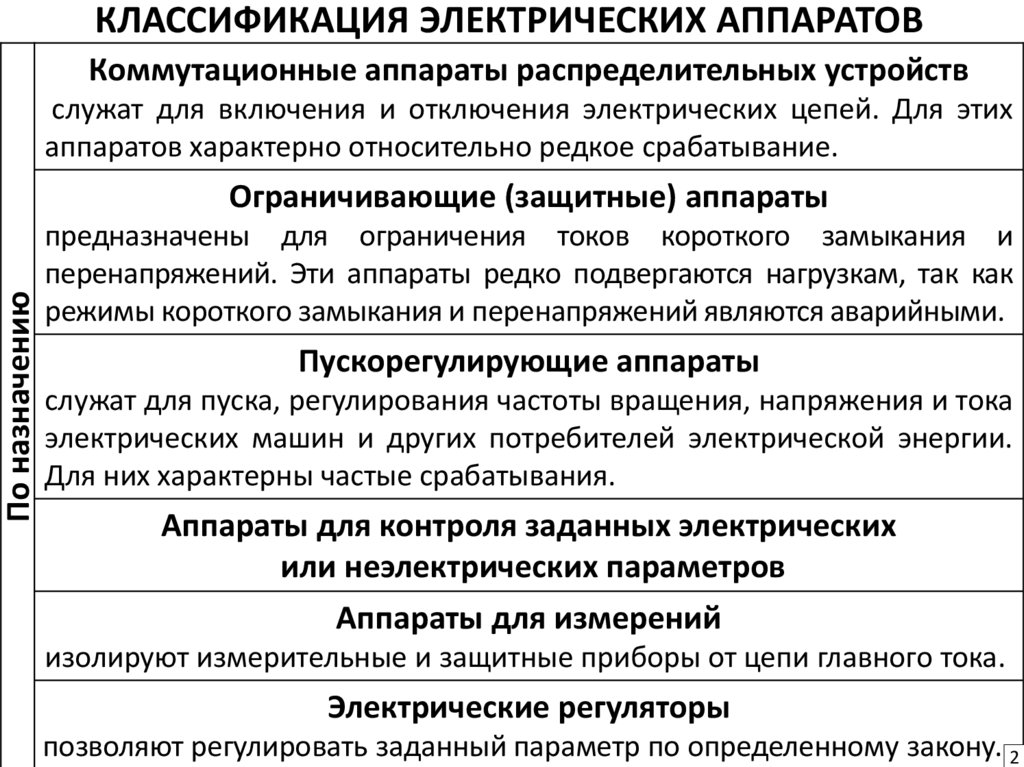
КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ АППАРАТОВКоммутационные аппараты распределительных устройств
служат для включения и отключения электрических цепей. Для этих
аппаратов характерно относительно редкое срабатывание.
По назначению
Ограничивающие (защитные) аппараты
предназначены для ограничения токов короткого замыкания и
перенапряжений. Эти аппараты редко подвергаются нагрузкам, так как
режимы короткого замыкания и перенапряжений являются аварийными.
Пускорегулирующие аппараты
служат для пуска, регулирования частоты вращения, напряжения и тока
электрических машин и других потребителей электрической энергии.
Для них характерны частые срабатывания.
Аппараты для контроля заданных электрических
или неэлектрических параметров
Аппараты для измерений
изолируют измерительные и защитные приборы от цепи главного тока.
Электрические регуляторы
позволяют регулировать заданный параметр по определенному закону. 2
3.
напряжениятока
По
степени
защиты
По
величине
По
По типу
областям
коммутирую- применещего элемента
ния
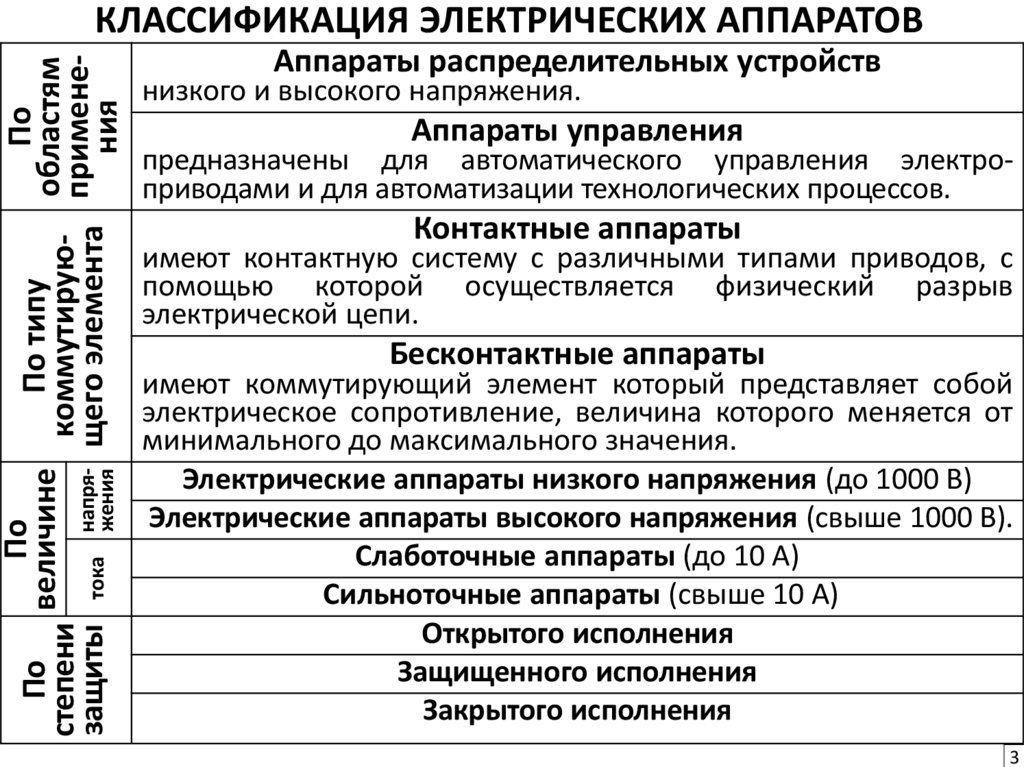
КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
Аппараты распределительных устройств
низкого и высокого напряжения.
Аппараты управления
предназначены для автоматического управления электроприводами и для автоматизации технологических процессов.
Контактные аппараты
имеют контактную систему с различными типами приводов, с
помощью которой осуществляется физический разрыв
электрической цепи.
Бесконтактные аппараты
имеют коммутирующий элемент который представляет собой
электрическое сопротивление, величина которого меняется от
минимального до максимального значения.
Электрические аппараты низкого напряжения (до 1000 В)
Электрические аппараты высокого напряжения (свыше 1000 В).
Слаботочные аппараты (до 10 А)
Сильноточные аппараты (свыше 10 А)
Открытого исполнения
Защищенного исполнения
Закрытого исполнения
3
4.
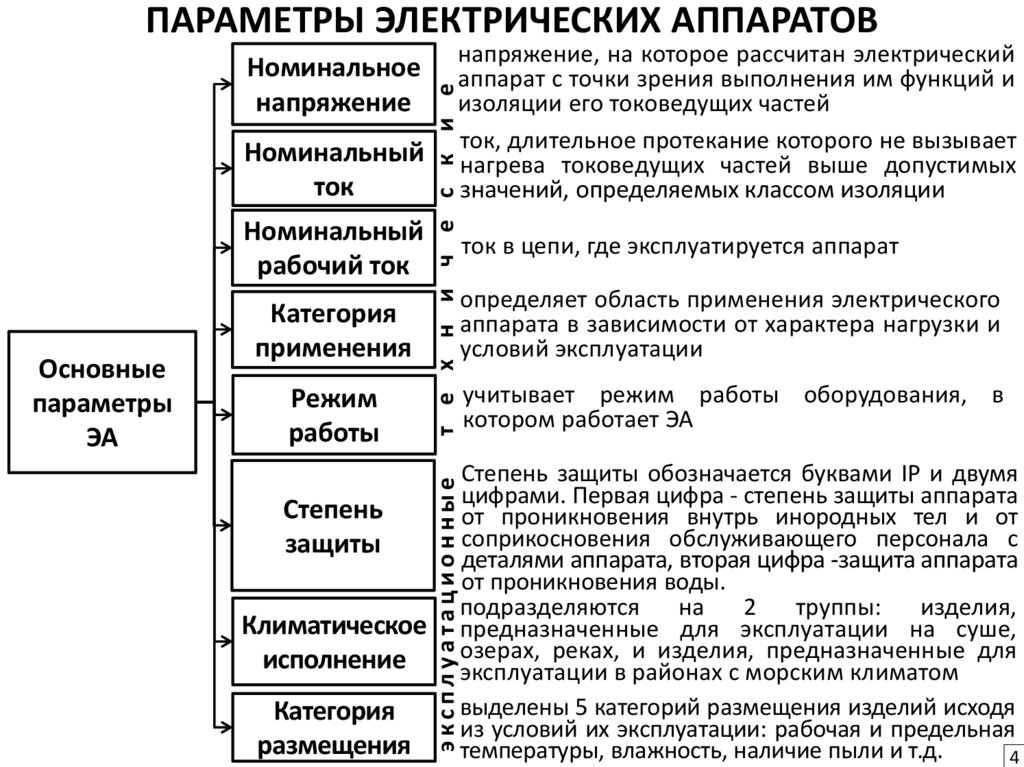
ПАРАМЕТРЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВНоминальный
рабочий ток
Основные
параметры
ЭА
Категория
применения
Режим
работы
Степень
защиты
Климатическое
исполнение
Категория
размещения
т е х н и ч е с к и е
Номинальный
ток
напряжение, на которое рассчитан электрический
аппарат с точки зрения выполнения им функций и
изоляции его токоведущих частей
ток, длительное протекание которого не вызывает
нагрева токоведущих частей выше допустимых
значений, определяемых классом изоляции
ток в цепи, где эксплуатируется аппарат
определяет область применения электрического
аппарата в зависимости от характера нагрузки и
условий эксплуатации
учитывает режим работы оборудования, в
котором работает ЭА
Степень защиты обозначается буквами IP и двумя
цифрами. Первая цифра - степень защиты аппарата
от проникновения внутрь инородных тел и от
соприкосновения обслуживающего персонала с
деталями аппарата, вторая цифра -защита аппарата
от проникновения воды.
подразделяются
на
2
труппы:
изделия,
предназначенные для эксплуатации на суше,
озерах, реках, и изделия, предназначенные для
эксплуатации в районах с морским климатом
выделены 5 категорий размещения изделий исходя
из условий их эксплуатации: рабочая и предельная
температуры, влажность, наличие пыли и т.д.
4
эксплуатационные
Номинальное
напряжение
5.
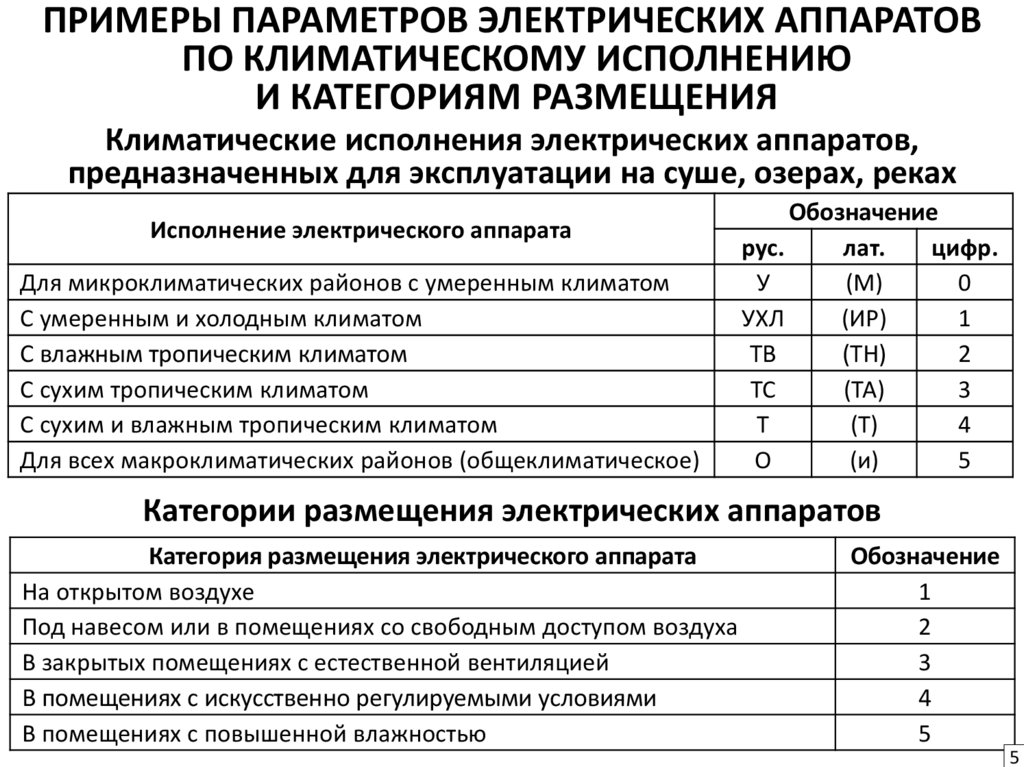
ПРИМЕРЫ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКИХ АППАРАТОВПО КЛИМАТИЧЕСКОМУ ИСПОЛНЕНИЮ
И КАТЕГОРИЯМ РАЗМЕЩЕНИЯ
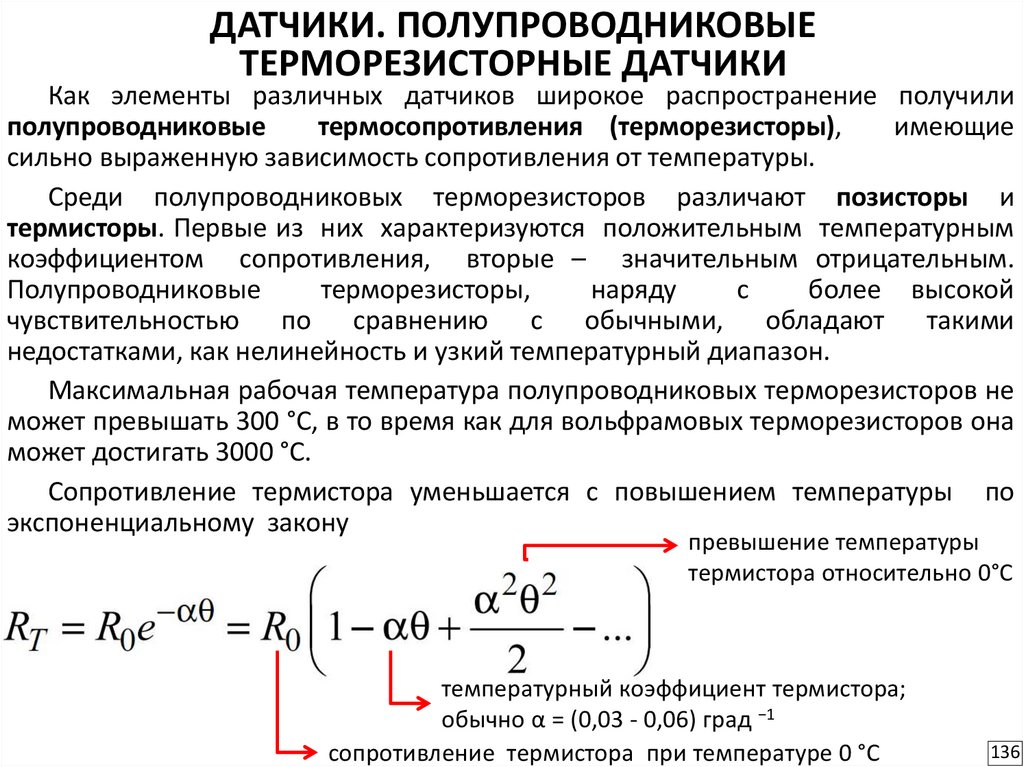
Климатические исполнения электрических аппаратов,
предназначенных для эксплуатации на суше, озерах, реках
Исполнение электрического аппарата
Для микроклиматических районов с умеренным климатом
С умеренным и холодным климатом
С влажным тропическим климатом
С сухим тропическим климатом
С сухим и влажным тропическим климатом
Для всех макроклиматических районов (общеклиматическое)
Обозначение
рус.
лат.
цифр.
У
(М)
0
УХЛ
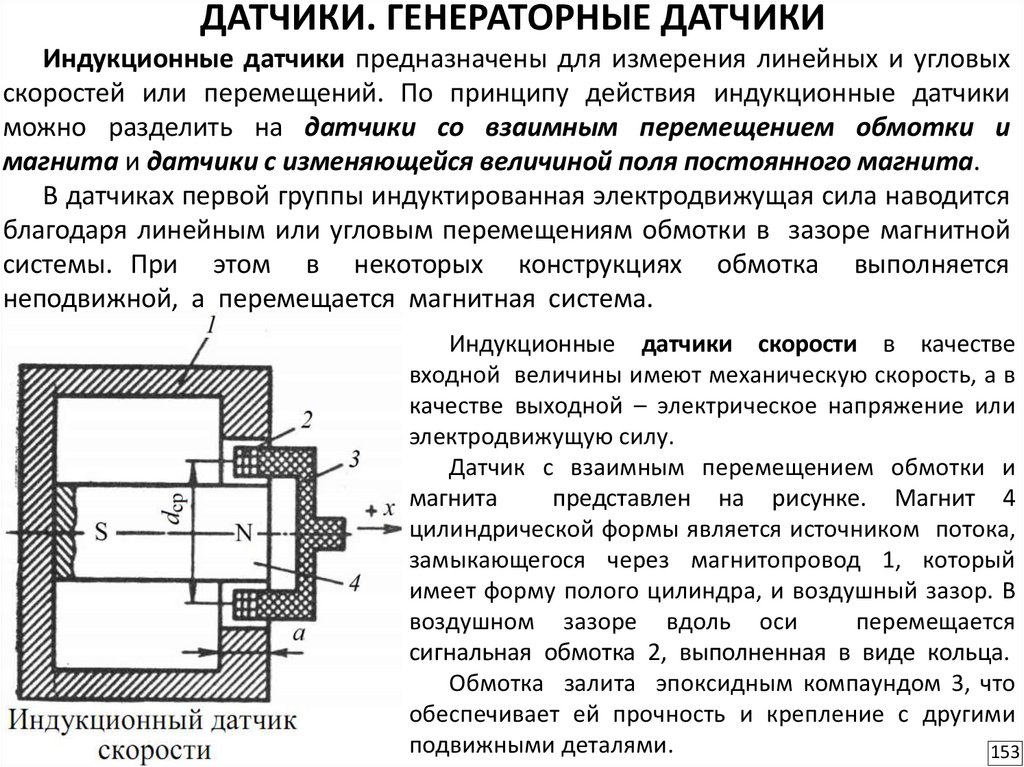
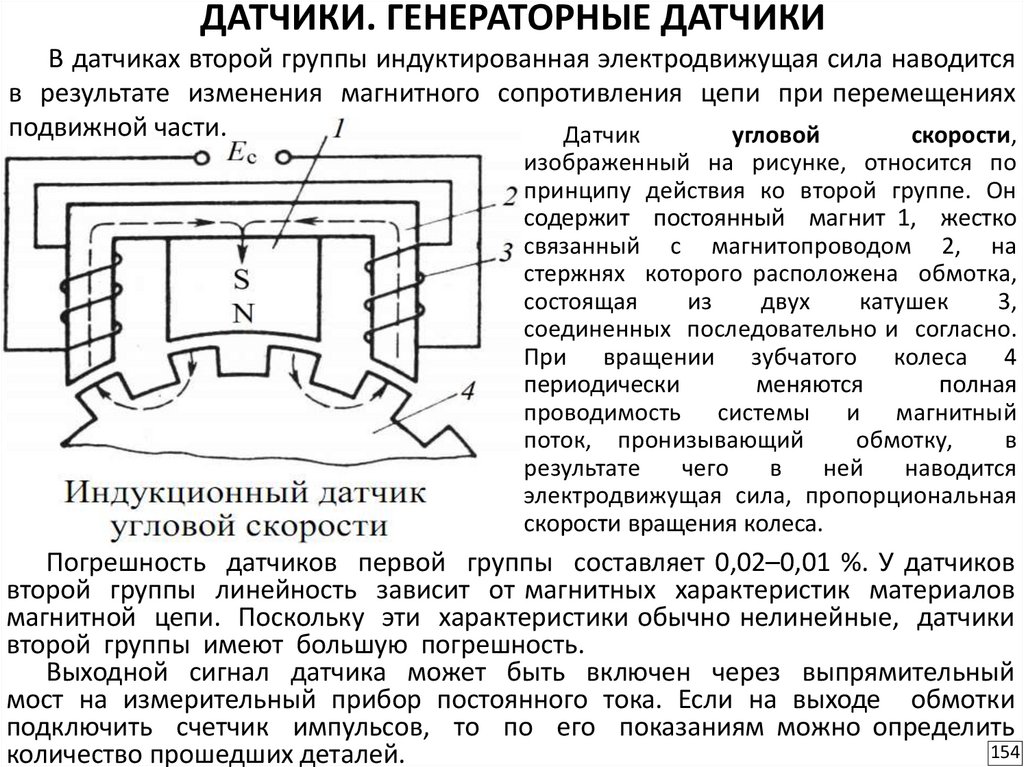
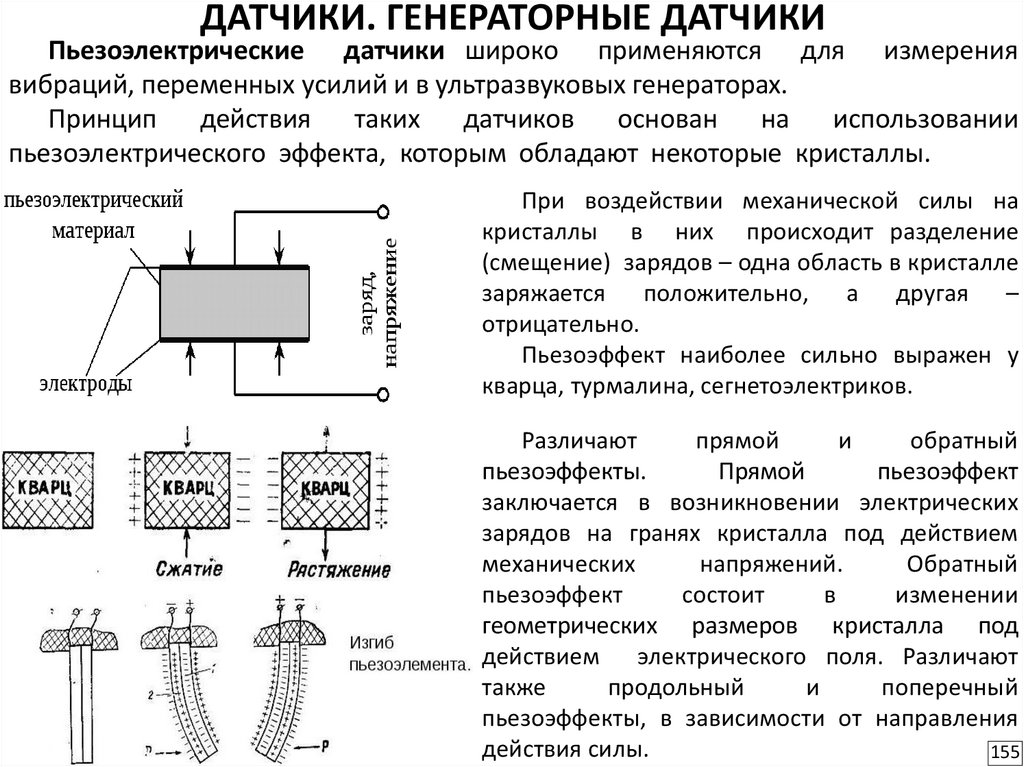
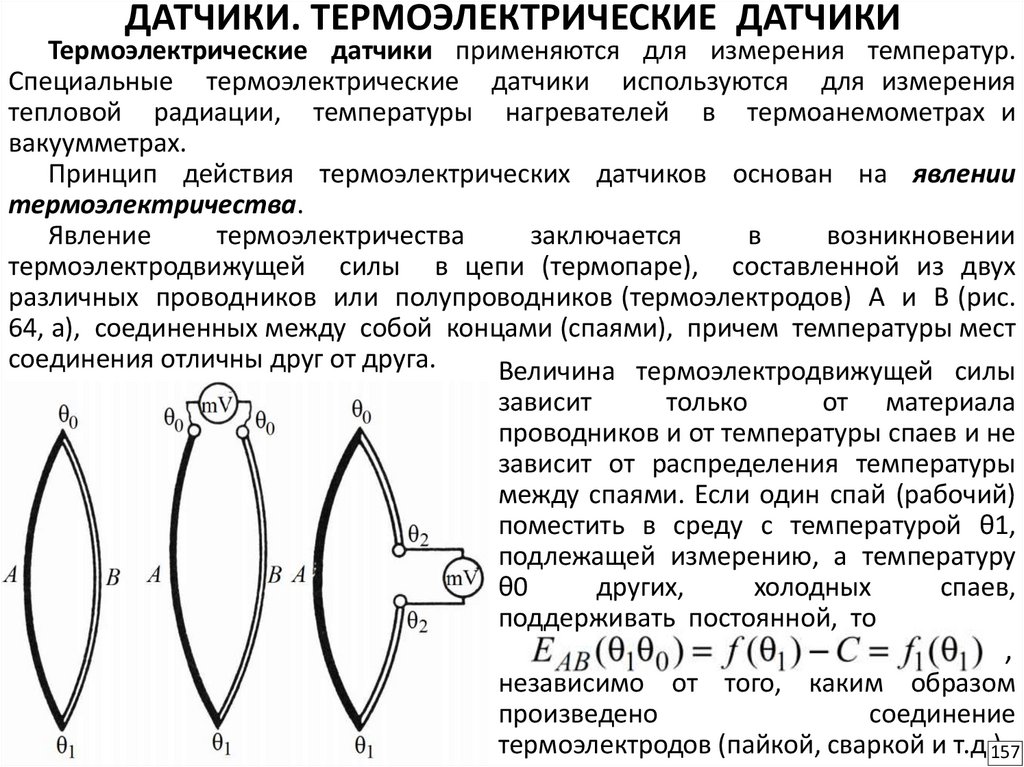
(ИР)
1
ТВ
(ТН)
2
ТС
(ТА)
3
Т
(Т)
4
О
(и)
5
Категории размещения электрических аппаратов
Категория размещения электрического аппарата
На открытом воздухе
Под навесом или в помещениях со свободным доступом воздуха
В закрытых помещениях с естественной вентиляцией
В помещениях с искусственно регулируемыми условиями
В помещениях с повышенной влажностью
Обозначение
1
2
3
4
5
5
6.
ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕК ЭЛЕКТРИЧЕСКИМ АППАРАТАМ
Минимально возможная
масса
габаритные размеры
Термическая стойкость
Динамическая стойкость
Основные
требования
к ЭА
стоимость
время установки
время обслуживания
Высокая механическая
износостойкость
Высокая электрическая
износостойкость
Технологичность
обеспечение простоты
изготовления
обеспечение удобства
изготовления
обеспечение удобства
сборки деталей
обеспечение удобства
регулировки деталей
обеспечение
преемственности в
производстве
6
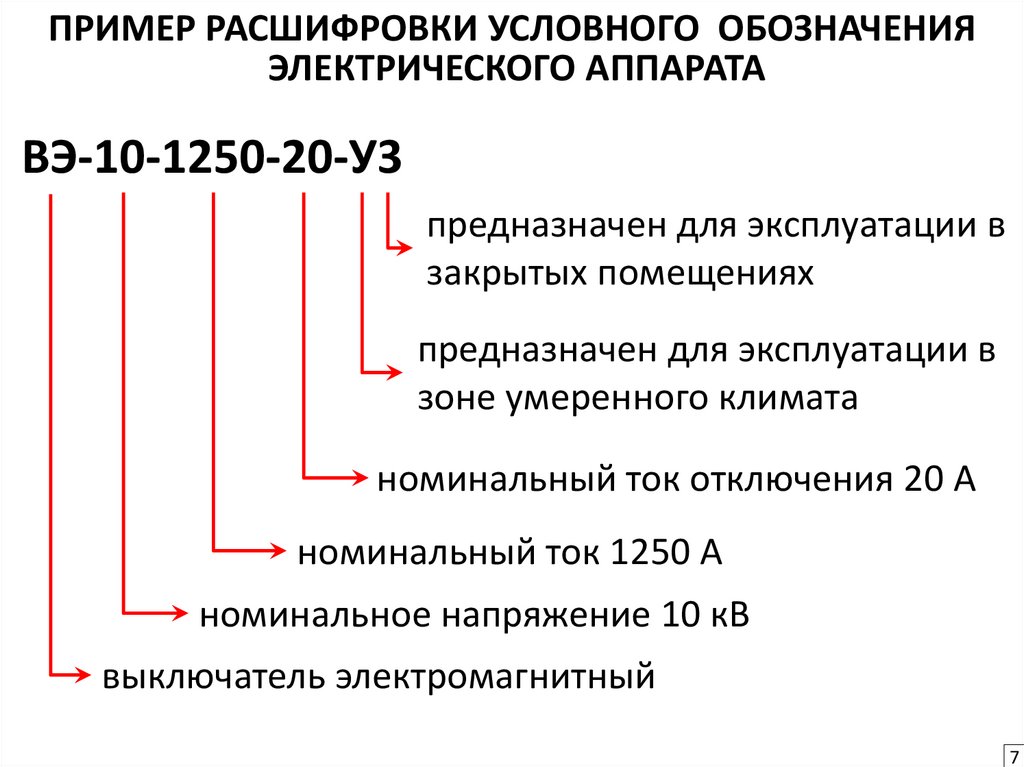
7.
ПРИМЕР РАСШИФРОВКИ УСЛОВНОГО ОБОЗНАЧЕНИЯЭЛЕКТРИЧЕСКОГО АППАРАТА
ВЭ-10-1250-20-У3
предназначен для эксплуатации в
закрытых помещениях
предназначен для эксплуатации в
зоне умеренного климата
номинальный ток отключения 20 А
номинальный ток 1250 А
номинальное напряжение 10 кВ
выключатель электромагнитный
7
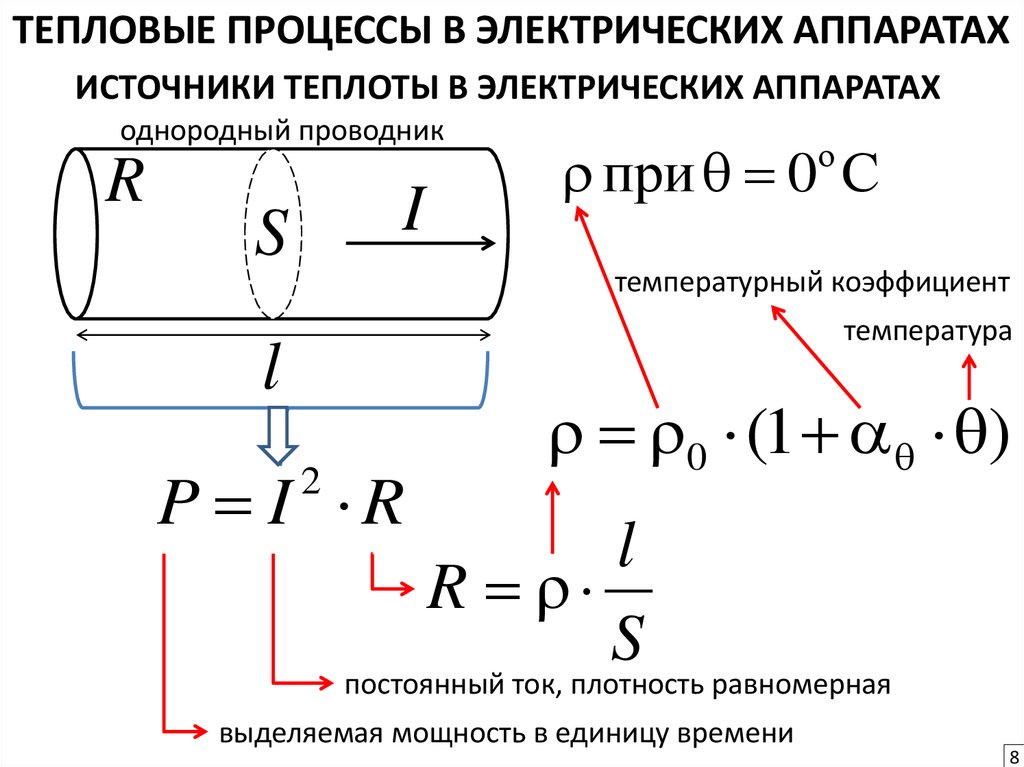
8.
ТЕПЛОВЫЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКИХ АППАРАТАХИСТОЧНИКИ ТЕПЛОТЫ В ЭЛЕКТРИЧЕСКИХ АППАРАТАХ
однородный проводник
R
I
S
при 0 C
o
температурный коэффициент
температура
l
P I R
2
0 (1 )
l
R
S
постоянный ток, плотность равномерная
выделяемая мощность в единицу времени
8
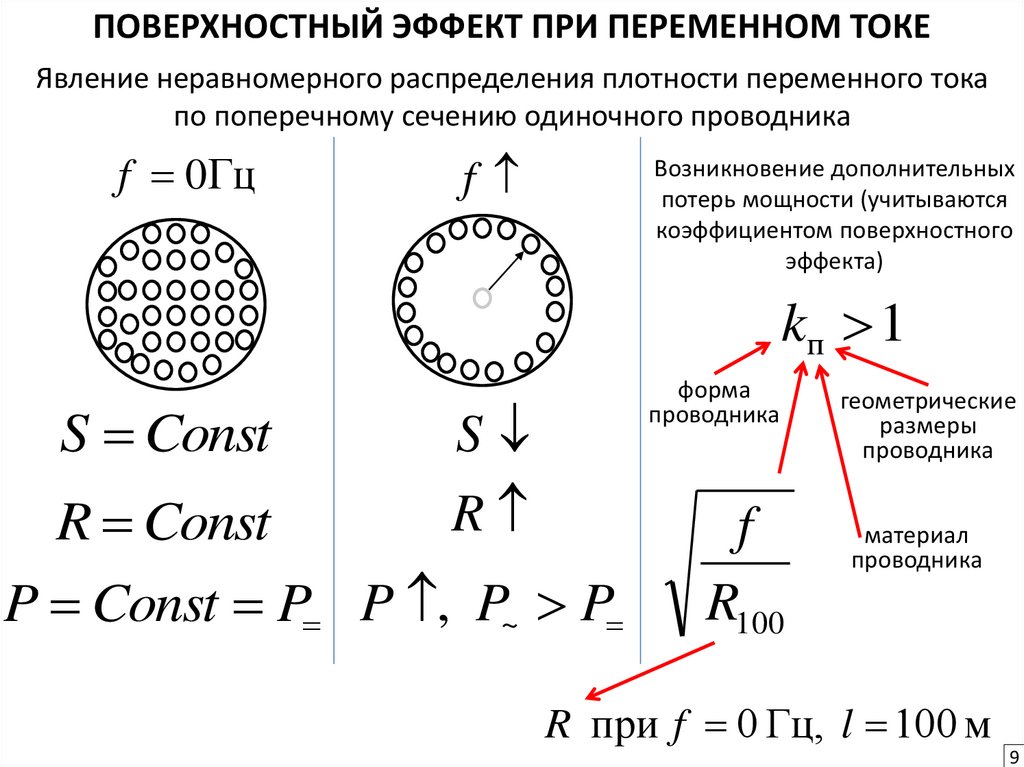
9.
ПОВЕРХНОСТНЫЙ ЭФФЕКТ ПРИ ПЕРЕМЕННОМ ТОКЕЯвление неравномерного распределения плотности переменного тока
по поперечному сечению одиночного проводника
f 0Гц
f
Возникновение дополнительных
потерь мощности (учитываются
коэффициентом поверхностного
эффекта)
kп 1
S Const
S
R
форма
проводника
R Const
P Const P P , P~ P
f
R100
геометрические
размеры
проводника
материал
проводника
R при f 0 Гц, l 100 м
9
10.
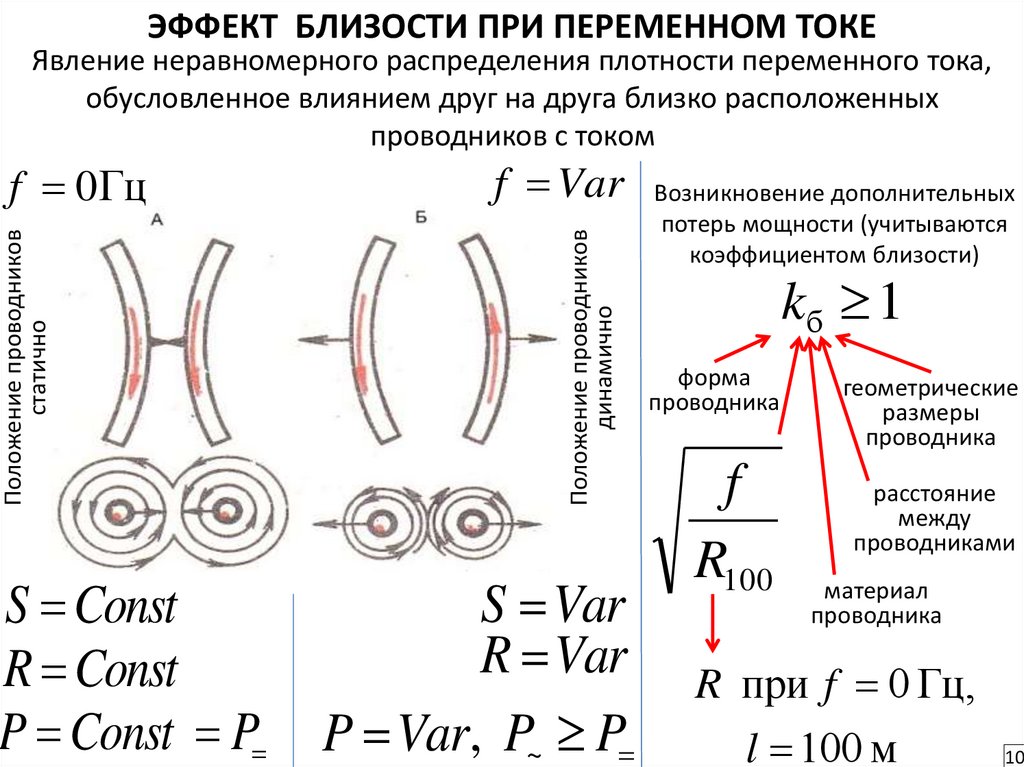
ЭФФЕКТ БЛИЗОСТИ ПРИ ПЕРЕМЕННОМ ТОКЕЯвление неравномерного распределения плотности переменного тока,
обусловленное влиянием друг на друга близко расположенных
проводников с током
S Const
R Const
P Const P
f Var
Положение проводников
динамично
Положение проводников
статично
f 0Гц
S Var
R Var
P Var, P~ P
Возникновение дополнительных
потерь мощности (учитываются
коэффициентом близости)
kб 1
форма
проводника
f
R100
геометрические
размеры
проводника
расстояние
между
проводниками
материал
проводника
R при f 0 Гц,
l 100 м
10
11.
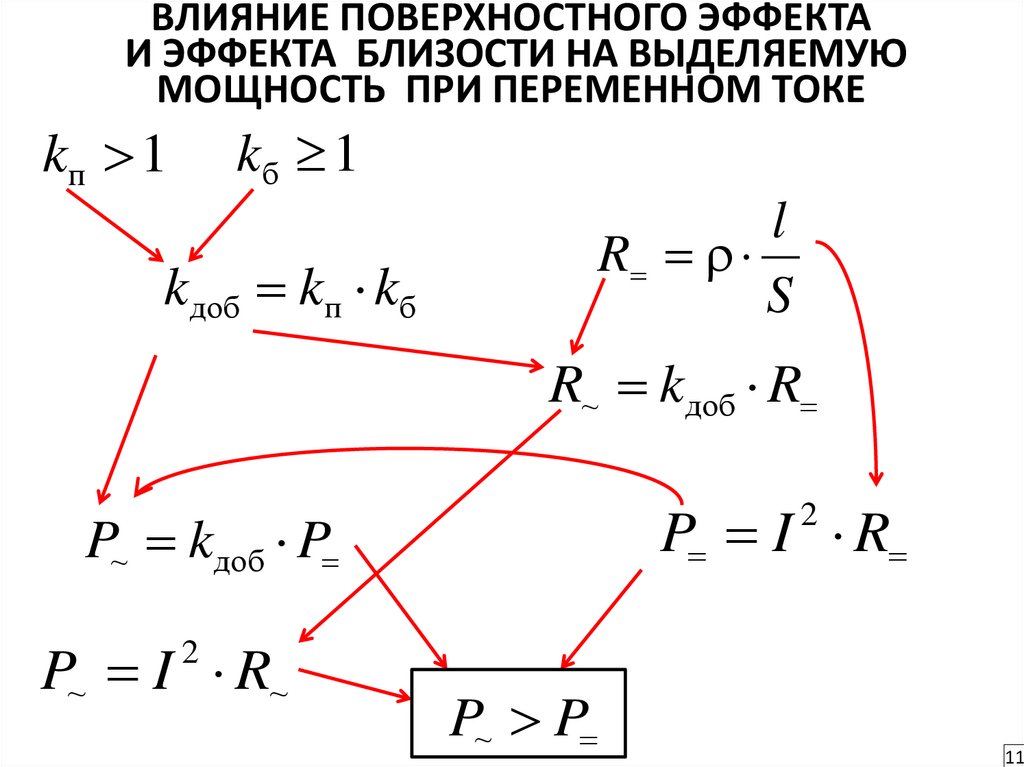
ВЛИЯНИЕ ПОВЕРХНОСТНОГО ЭФФЕКТАИ ЭФФЕКТА БЛИЗОСТИ НА ВЫДЕЛЯЕМУЮ
МОЩНОСТЬ ПРИ ПЕРЕМЕННОМ ТОКЕ
kп 1
kб 1
l
R
S
kдоб kп kб
R~ kдоб R
P I R
2
P~ kдоб P
P~ I R~
2
P~ P
11
12.
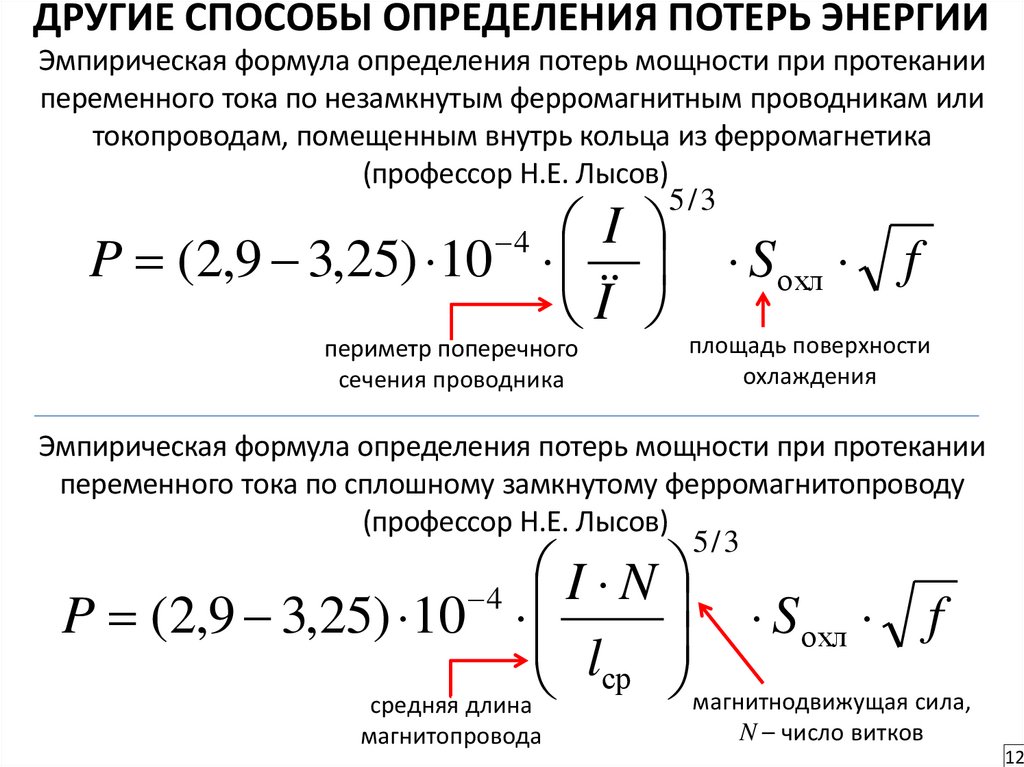
ДРУГИЕ СПОСОБЫ ОПРЕДЕЛЕНИЯ ПОТЕРЬ ЭНЕРГИИЭмпирическая формула определения потерь мощности при протекании
переменного тока по незамкнутым ферромагнитным проводникам или
токопроводам, помещенным внутрь кольца из ферромагнетика
(профессор Н.Е. Лысов)
5/3
4
охл
I
P (2,9 3,25) 10
Ï
периметр поперечного
сечения проводника
S
f
площадь поверхности
охлаждения
Эмпирическая формула определения потерь мощности при протекании
переменного тока по сплошному замкнутому ферромагнитопроводу
(профессор Н.Е. Лысов)
5/3
I N
S охл f
P (2,9 3,25) 10
l
ср
магнитнодвижущая сила,
средняя длина
4
магнитопровода
N – число витков
12
13.
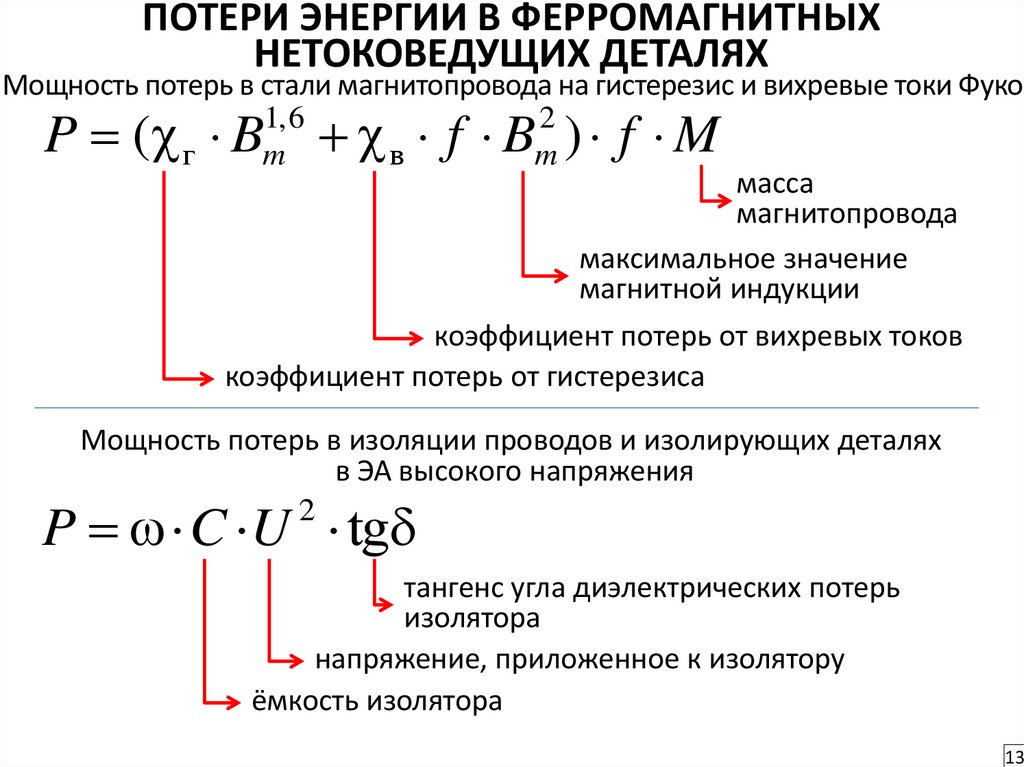
ПОТЕРИ ЭНЕРГИИ В ФЕРРОМАГНИТНЫХНЕТОКОВЕДУЩИХ ДЕТАЛЯХ
Мощность потерь в стали магнитопровода на гистерезис и вихревые токи Фуко
1, 6
2
г
m
в
m
масса
магнитопровода
максимальное значение
магнитной индукции
P ( B
f B ) f M
коэффициент потерь от вихревых токов
коэффициент потерь от гистерезиса
Мощность потерь в изоляции проводов и изолирующих деталях
в ЭА высокого напряжения
2
P C U tg
тангенс угла диэлектрических потерь
изолятора
напряжение, приложенное к изолятору
ёмкость изолятора
13
14.
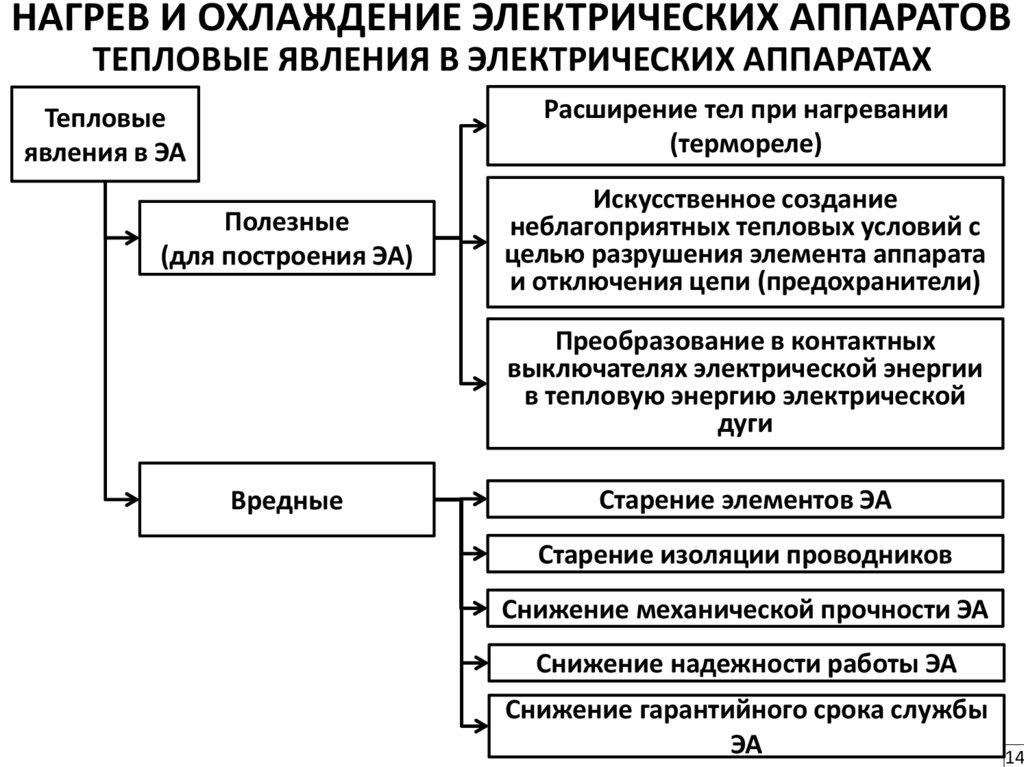
НАГРЕВ И ОХЛАЖДЕНИЕ ЭЛЕКТРИЧЕСКИХ АППАРАТОВТЕПЛОВЫЕ ЯВЛЕНИЯ В ЭЛЕКТРИЧЕСКИХ АППАРАТАХ
Расширение тел при нагревании
(термореле)
Тепловые
явления в ЭА
Полезные
(для построения ЭА)
Искусственное создание
неблагоприятных тепловых условий с
целью разрушения элемента аппарата
и отключения цепи (предохранители)
Преобразование в контактных
выключателях электрической энергии
в тепловую энергию электрической
дуги
Вредные
Старение элементов ЭА
Старение изоляции проводников
Снижение механической прочности ЭА
Снижение надежности работы ЭА
Снижение гарантийного срока службы
ЭА
14
15.
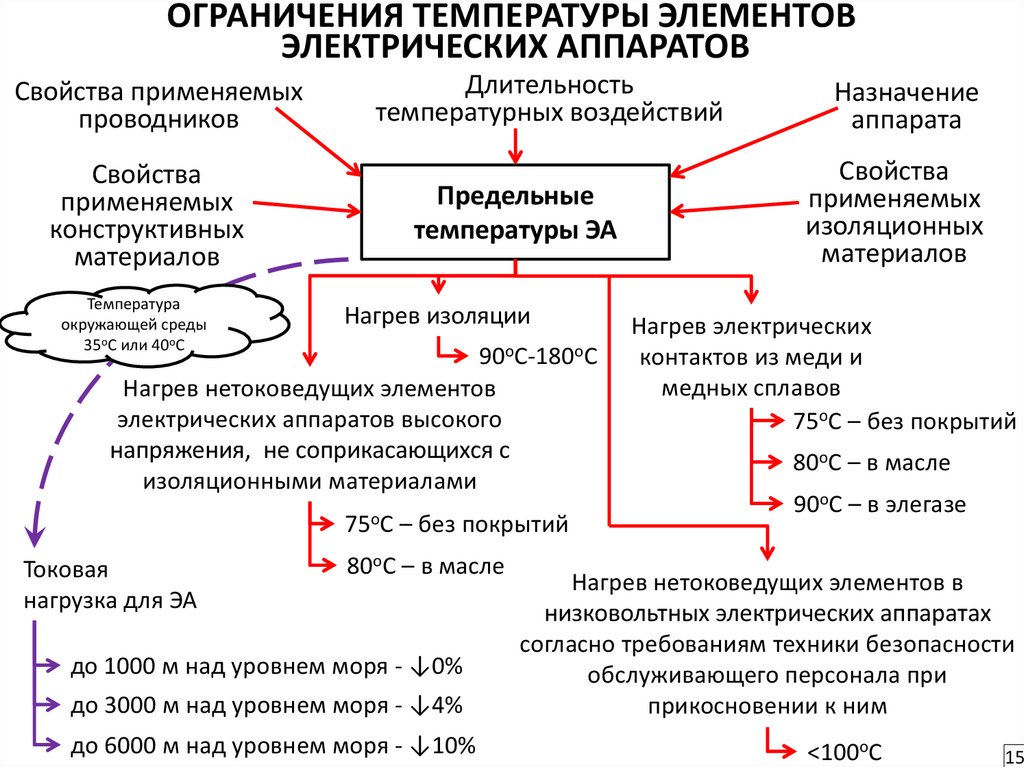
ОГРАНИЧЕНИЯ ТЕМПЕРАТУРЫ ЭЛЕМЕНТОВЭЛЕКТРИЧЕСКИХ АППАРАТОВ
Свойства применяемых
проводников
Свойства
применяемых
конструктивных
материалов
Температура
окружающей среды
35оС или 40оС
Длительность
температурных воздействий
Предельные
температуры ЭА
Нагрев изоляции
90оС-180оС
Нагрев нетоковедущих элементов
электрических аппаратов высокого
напряжения, не соприкасающихся с
изоляционными материалами
75оС – без покрытий
Токовая
нагрузка для ЭА
80оС – в масле
до 1000 м над уровнем моря - ↓0%
до 3000 м над уровнем моря - ↓4%
до 6000 м над уровнем моря - ↓10%
Назначение
аппарата
Свойства
применяемых
изоляционных
материалов
Нагрев электрических
контактов из меди и
медных сплавов
75оС – без покрытий
80оС – в масле
90оС – в элегазе
Нагрев нетоковедущих элементов в
низковольтных электрических аппаратах
согласно требованиям техники безопасности
обслуживающего персонала при
прикосновении к ним
<100оС
15
16.
СПОСОБЫ ТЕПЛООБМЕНА. ТЕПЛОПРОВОДНОСТЬв ЭА происходит
ТЕПЛООБМЕН – распространение теплоты в электрических аппаратах.
ТЕПЛОПРОВОДНОСТЬ – распространение тепловой энергии при
непосредственном соприкосновении отдельных частиц или тел,
имеющих разную температуру.
от элементов этих систем к соприкасающимся металлическим
нетоковедущим
конструктивным
или
изоляционным
элементам;
от наиболее нагретых элементов токоведущих систем
к менее нагретым, включенным последовательно;
к специальным радиаторам;
к элементам системы принудительного, как правило
жидкостного,
охлаждения
в
аппаратах
с
искусственным охлаждением.
16
17.
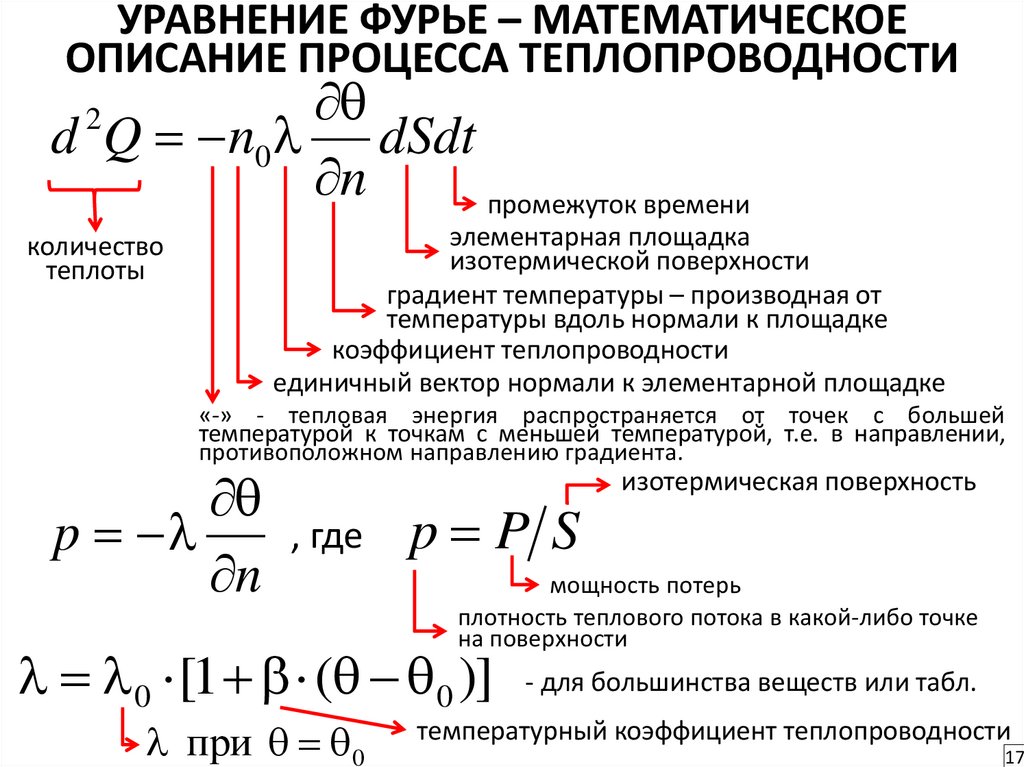
УРАВНЕНИЕ ФУРЬЕ – МАТЕМАТИЧЕСКОЕОПИСАНИЕ ПРОЦЕССА ТЕПЛОПРОВОДНОСТИ
d Q n0 dSdt
n
промежуток времени
2
элементарная площадка
изотермической поверхности
градиент температуры – производная от
температуры вдоль нормали к площадке
коэффициент теплопроводности
единичный вектор нормали к элементарной площадке
количество
теплоты
«-» - тепловая энергия распространяется от точек с большей
температурой к точкам с меньшей температурой, т.е. в направлении,
противоположном направлению градиента.
p
n
, где
p P S
мощность потерь
плотность теплового потока в какой-либо точке
на поверхности
0 [1 ( 0 )]
при 0
изотермическая поверхность
- для большинства веществ или табл.
температурный коэффициент теплопроводности
17
18.
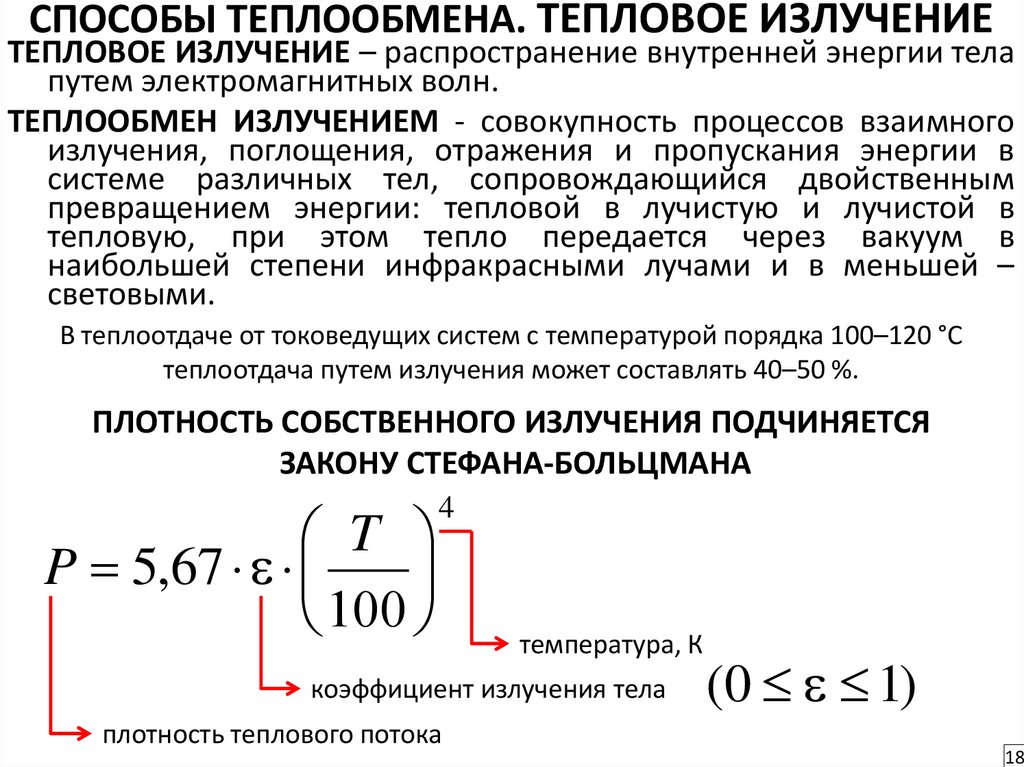
СПОСОБЫ ТЕПЛООБМЕНА. ТЕПЛОВОЕ ИЗЛУЧЕНИЕТЕПЛОВОЕ ИЗЛУЧЕНИЕ – распространение внутренней энергии тела
путем электромагнитных волн.
ТЕПЛООБМЕН ИЗЛУЧЕНИЕМ - совокупность процессов взаимного
излучения, поглощения, отражения и пропускания энергии в
системе различных тел, сопровождающийся двойственным
превращением энергии: тепловой в лучистую и лучистой в
тепловую, при этом тепло передается через вакуум в
наибольшей степени инфракрасными лучами и в меньшей –
световыми.
В теплоотдаче от токоведущих систем с температурой порядка 100–120 °С
теплоотдача путем излучения может составлять 40–50 %.
ПЛОТНОСТЬ СОБСТВЕННОГО ИЗЛУЧЕНИЯ ПОДЧИНЯЕТСЯ
ЗАКОНУ СТЕФАНА-БОЛЬЦМАНА
T
P 5,67
100
4
температура, К
коэффициент излучения тела
плотность теплового потока
(0 1)
18
19.
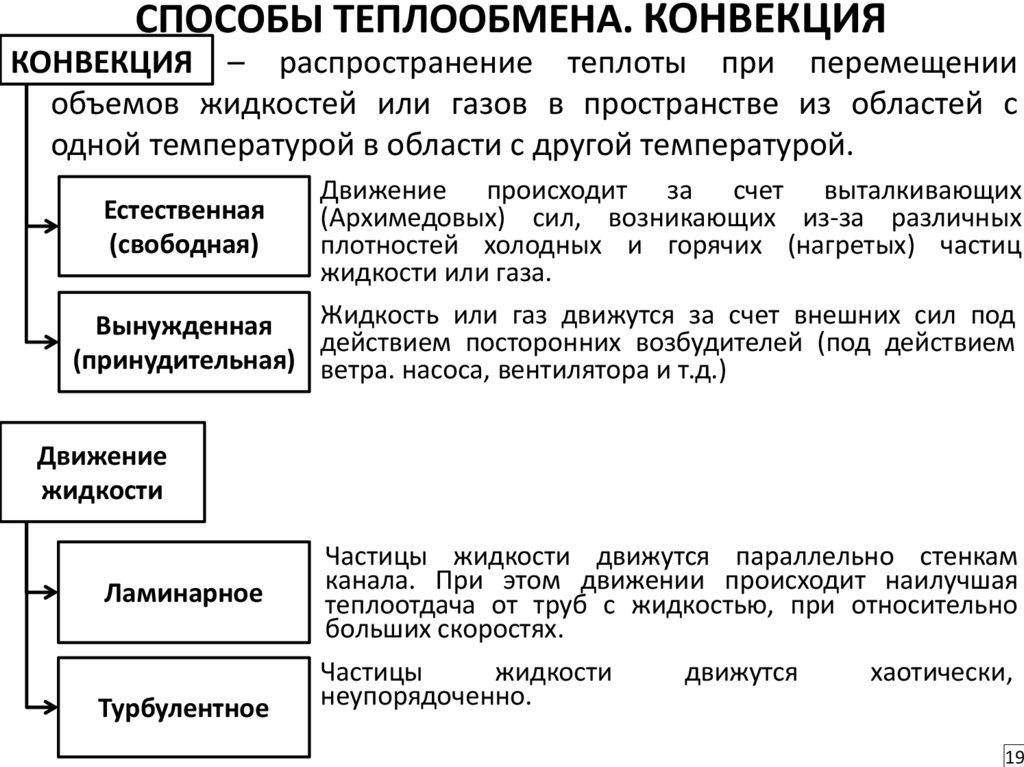
СПОСОБЫ ТЕПЛООБМЕНА. КОНВЕКЦИЯКОНВЕКЦИЯ – распространение теплоты при перемещении
объемов жидкостей или газов в пространстве из областей с
одной температурой в области с другой температурой.
Движение происходит за счет выталкивающих
(Архимедовых) сил, возникающих из-за различных
плотностей холодных и горячих (нагретых) частиц
жидкости или газа.
Жидкость или газ движутся за счет внешних сил под
Вынужденная
действием посторонних возбудителей (под действием
(принудительная) ветра. насоса, вентилятора и т.д.)
Естественная
(свободная)
Движение
жидкости
Ламинарное
Турбулентное
Частицы жидкости движутся параллельно стенкам
канала. При этом движении происходит наилучшая
теплоотдача от труб с жидкостью, при относительно
больших скоростях.
Частицы
жидкости
неупорядоченно.
движутся
хаотически,
19
20.
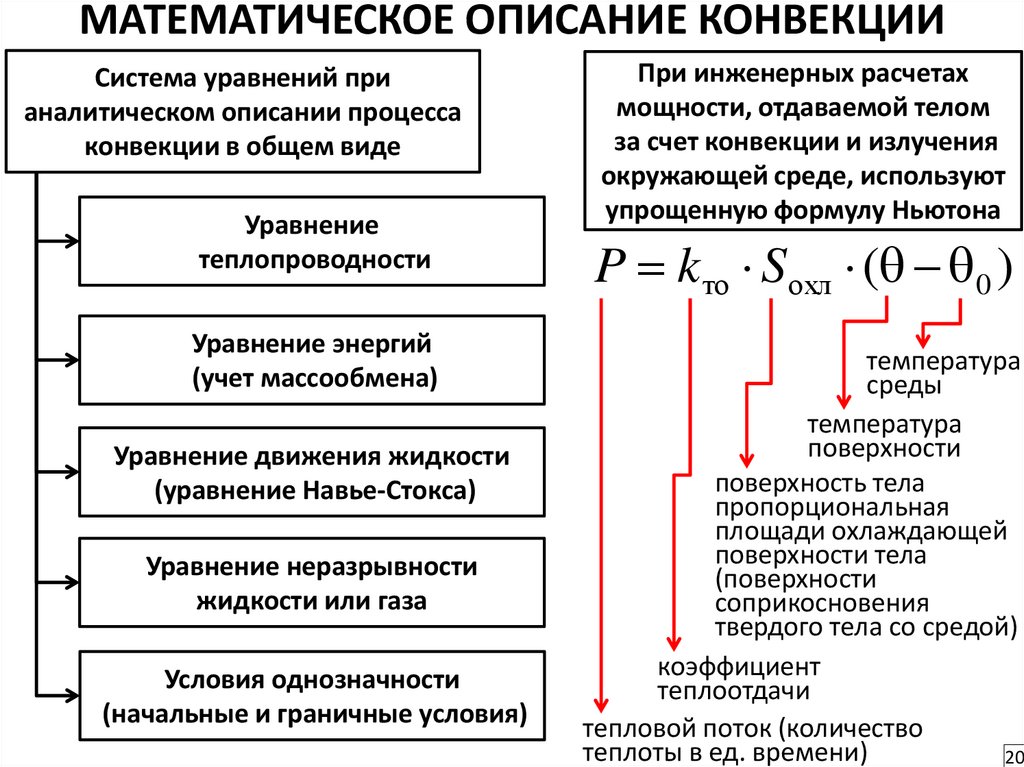
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ КОНВЕКЦИИСистема уравнений при
аналитическом описании процесса
конвекции в общем виде
Уравнение
теплопроводности
Уравнение энергий
(учет массообмена)
Уравнение движения жидкости
(уравнение Навье-Стокса)
Уравнение неразрывности
жидкости или газа
Условия однозначности
(начальные и граничные условия)
При инженерных расчетах
мощности, отдаваемой телом
за счет конвекции и излучения
окружающей среде, используют
упрощенную формулу Ньютона
P k то Sохл ( 0 )
температура
среды
температура
поверхности
поверхность тела
пропорциональная
площади охлаждающей
поверхности тела
(поверхности
соприкосновения
твердого тела со средой)
коэффициент
теплоотдачи
тепловой поток (количество
теплоты в ед. времени)
20
21.
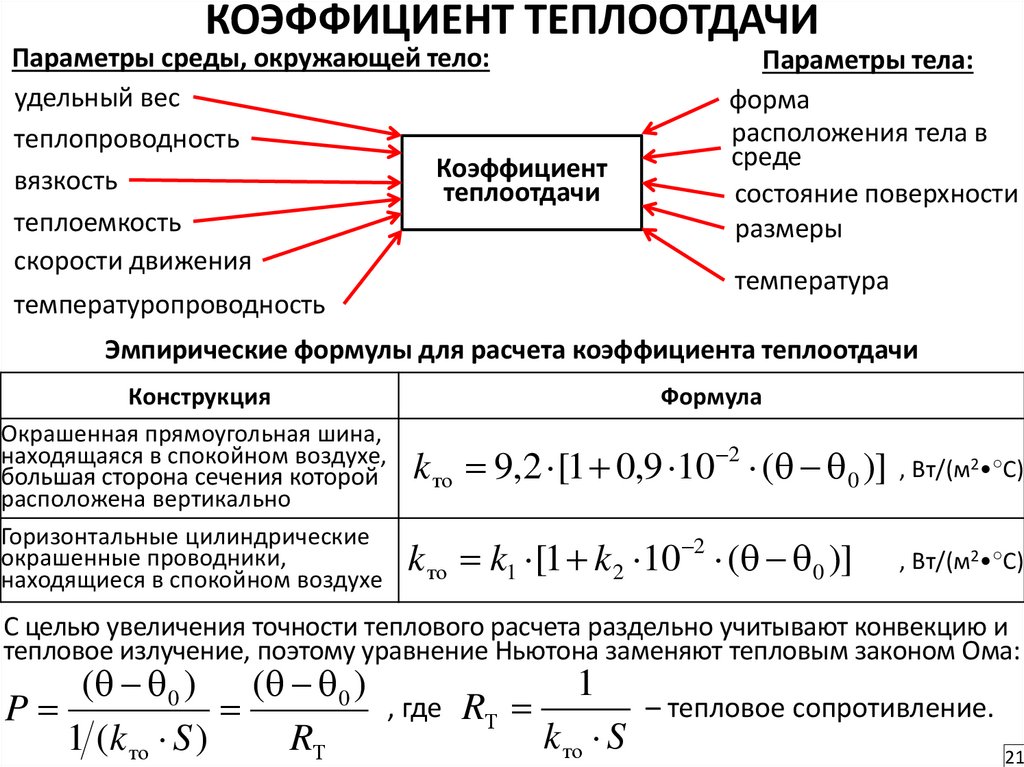
КОЭФФИЦИЕНТ ТЕПЛООТДАЧИПараметры среды, окружающей тело:
удельный вес
теплопроводность
Коэффициент
вязкость
теплоотдачи
теплоемкость
скорости движения
температуропроводность
Параметры тела:
форма
расположения тела в
среде
состояние поверхности
размеры
температура
Эмпирические формулы для расчета коэффициента теплоотдачи
Конструкция
Окрашенная прямоугольная шина,
находящаяся в спокойном воздухе,
большая сторона сечения которой
расположена вертикально
Горизонтальные цилиндрические
окрашенные проводники,
находящиеся в спокойном воздухе
Формула
k то 9,2 [1 0,9 10 2 ( 0 )]
, Вт/(м2•°С)
k то k1 [1 k 2 10 2 ( 0 )]
, Вт/(м2•°С)
С целью увеличения точности теплового расчета раздельно учитывают конвекцию и
тепловое излучение, поэтому уравнение Ньютона заменяют тепловым законом Ома:
( 0 ) ( 0 )
P
1 (k то S )
RТ
, где
1
RТ
k то S
– тепловое сопротивление.
21
22.
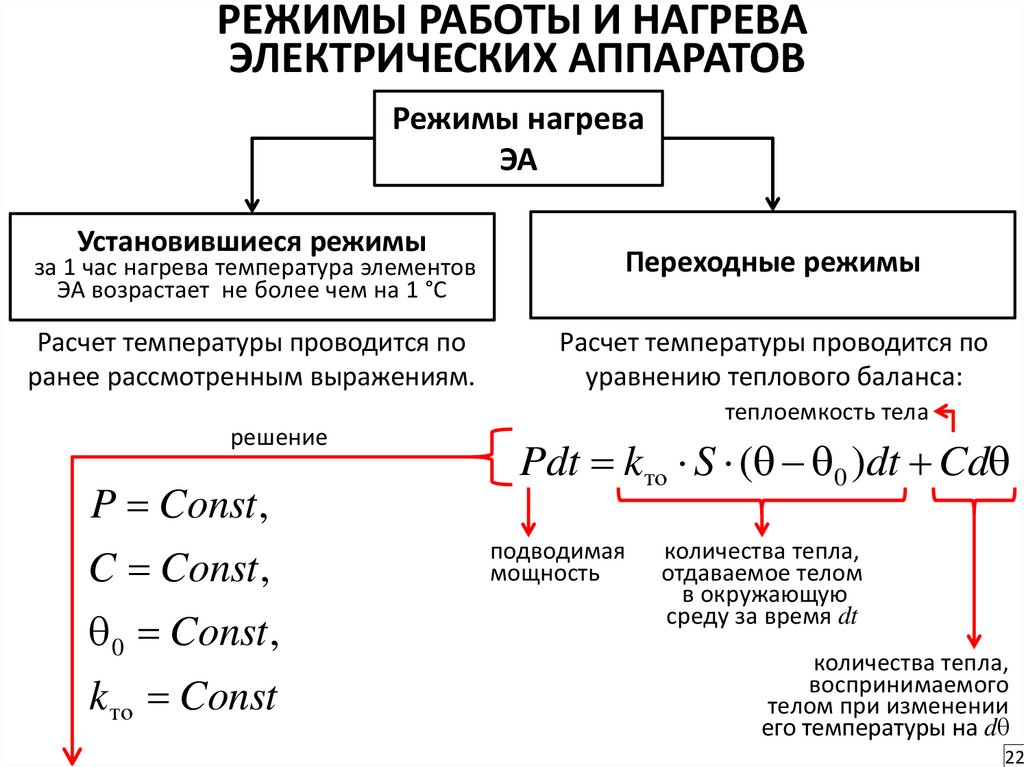
РЕЖИМЫ РАБОТЫ И НАГРЕВАЭЛЕКТРИЧЕСКИХ АППАРАТОВ
Режимы нагрева
ЭА
Установившиеся режимы
за 1 час нагрева температура элементов
ЭА возрастает не более чем на 1 °С
Переходные режимы
Расчет температуры проводится по
ранее рассмотренным выражениям.
Расчет температуры проводится по
уравнению теплового баланса:
решение
P Const ,
C Const ,
0 Const ,
k то Const
теплоемкость тела
Pdt kто S ( 0 )dt Cd
подводимая
мощность
количества тепла,
отдаваемое телом
в окружающую
среду за время dt
количества тепла,
воспринимаемого
телом при изменении
его температуры на dθ
22
23.
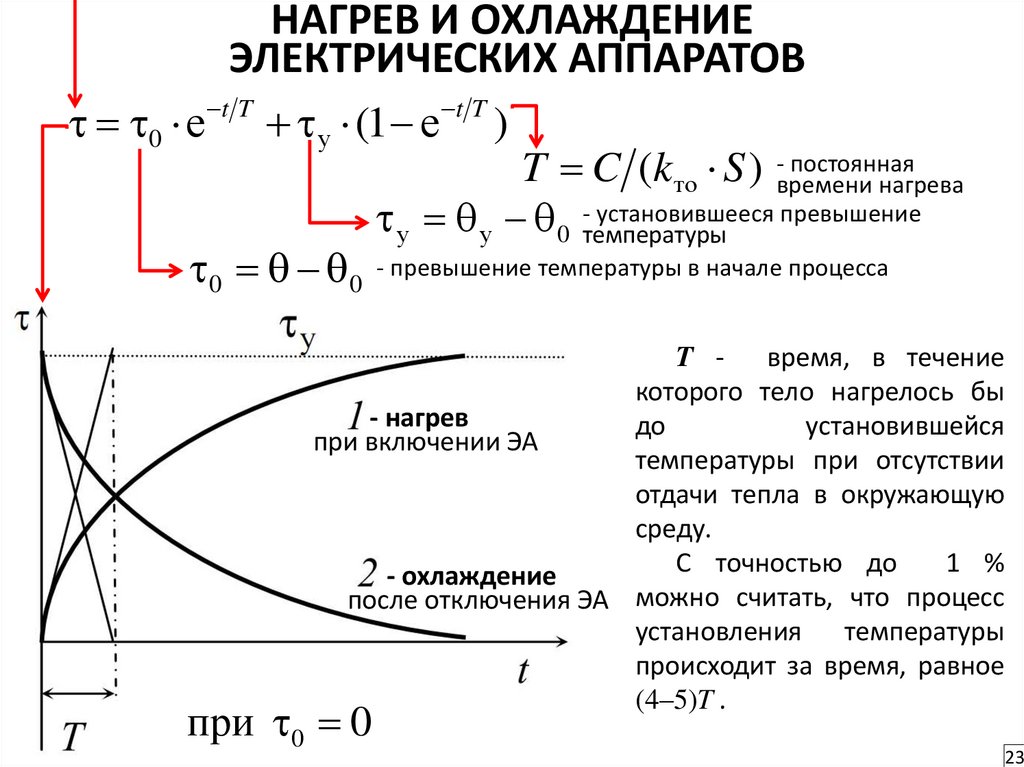
НАГРЕВ И ОХЛАЖДЕНИЕЭЛЕКТРИЧЕСКИХ АППАРАТОВ
0 e
t T
у (1 e
0 0
t T
)
постоянная
T C (kто S ) -времени
нагрева
установившееся превышение
у у 0 -температуры
- превышение температуры в начале процесса
T время, в течение
которого тело нагрелось бы
- нагрев
до
установившейся
при включении ЭА
температуры при отсутствии
отдачи тепла в окружающую
среду.
С точностью до
1 %
- охлаждение
после отключения ЭА можно считать, что процесс
установления температуры
происходит за время, равное
(4–5)T .
при 0 0
23
24.
РЕЖИМЫ РАБОТЫЭЛЕКТРИЧЕСКИХ АППАРАТОВ
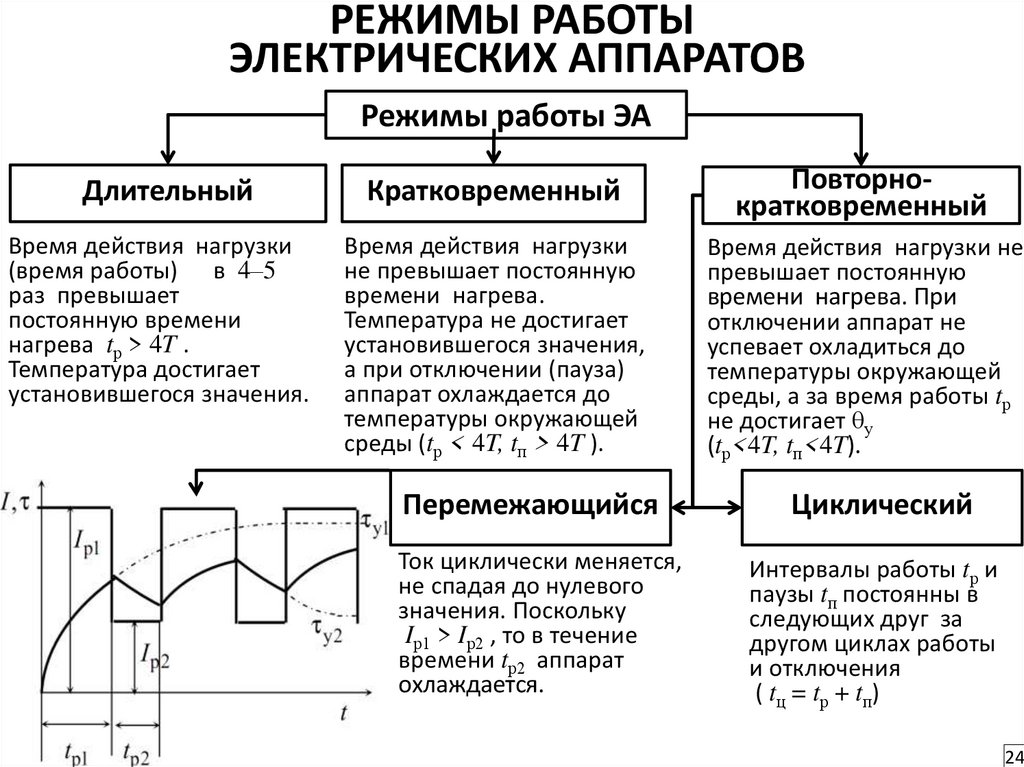
Режимы работы ЭА
Длительный
Время действия нагрузки
(время работы) в 4–5
раз превышает
постоянную времени
нагрева tр > 4T .
Температура достигает
установившегося значения.
Кратковременный
Повторнократковременный
Время действия нагрузки
не превышает постоянную
времени нагрева.
Температура не достигает
установившегося значения,
а при отключении (пауза)
аппарат охлаждается до
температуры окружающей
среды (tр < 4T, tп > 4T ).
Время действия нагрузки не
превышает постоянную
времени нагрева. При
отключении аппарат не
успевает охладиться до
температуры окружающей
среды, а за время работы tр
не достигает θу
(tр<4T, tп<4T).
Перемежающийся
Ток циклически меняется,
не спадая до нулевого
значения. Поскольку
Iр1 > Iр2 , то в течение
времени tр2 аппарат
охлаждается.
Циклический
Интервалы работы tр и
паузы tп постоянны в
следующих друг за
другом циклах работы
и отключения
( tц = tр + tп )
24
25.
ОСОБЕННОСТИ ПОВТОРНО-КРАТКОВРЕМЕННОГОРЕЖИМА РАБОТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
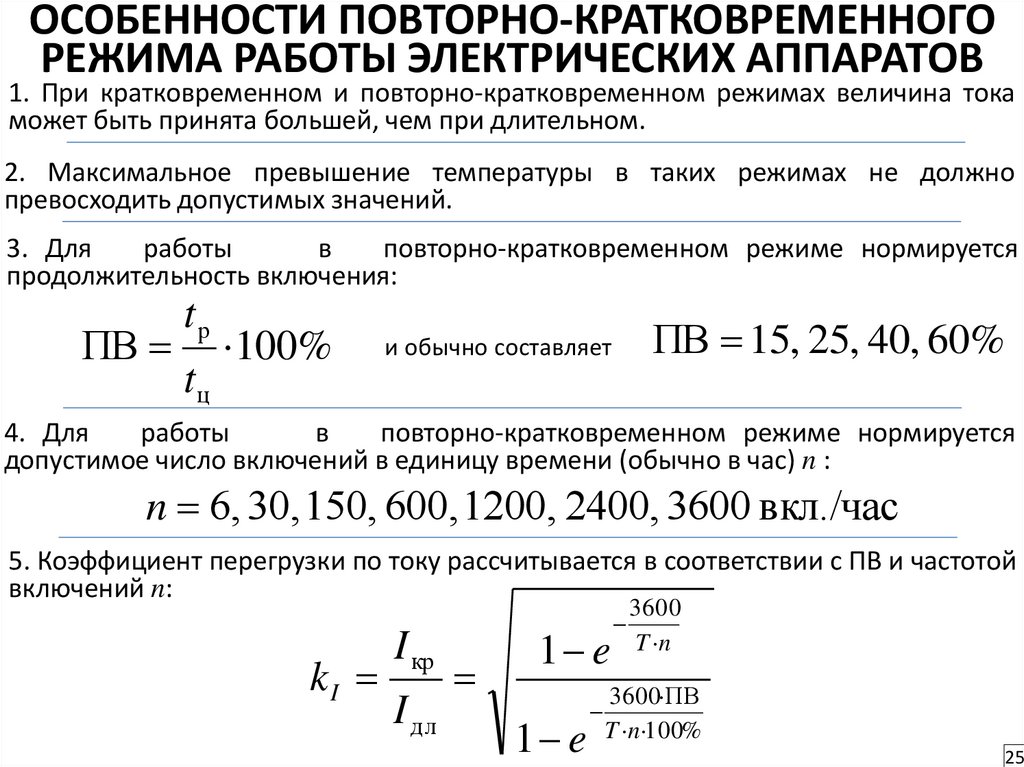
1. При кратковременном и повторно-кратковременном режимах величина тока
может быть принята большей, чем при длительном.
2. Максимальное превышение температуры в таких режимах не должно
превосходить допустимых значений.
3. Для
работы
в
повторно-кратковременном режиме нормируется
продолжительность включения:
ПВ
tр
tц
100%
ПВ 15, 25, 40, 60%
и обычно составляет
4. Для
работы
в
повторно-кратковременном режиме нормируется
допустимое число включений в единицу времени (обычно в час) n :
n 6, 30, 150, 600, 1200, 2400, 3600 вкл./час
5. Коэффициент перегрузки по току рассчитывается в соответствии с ПВ и частотой
включений n:
kI
I кр
I дл
1 e
1 e
3600
T n
3600 ПВ
T n 100%
25
26.
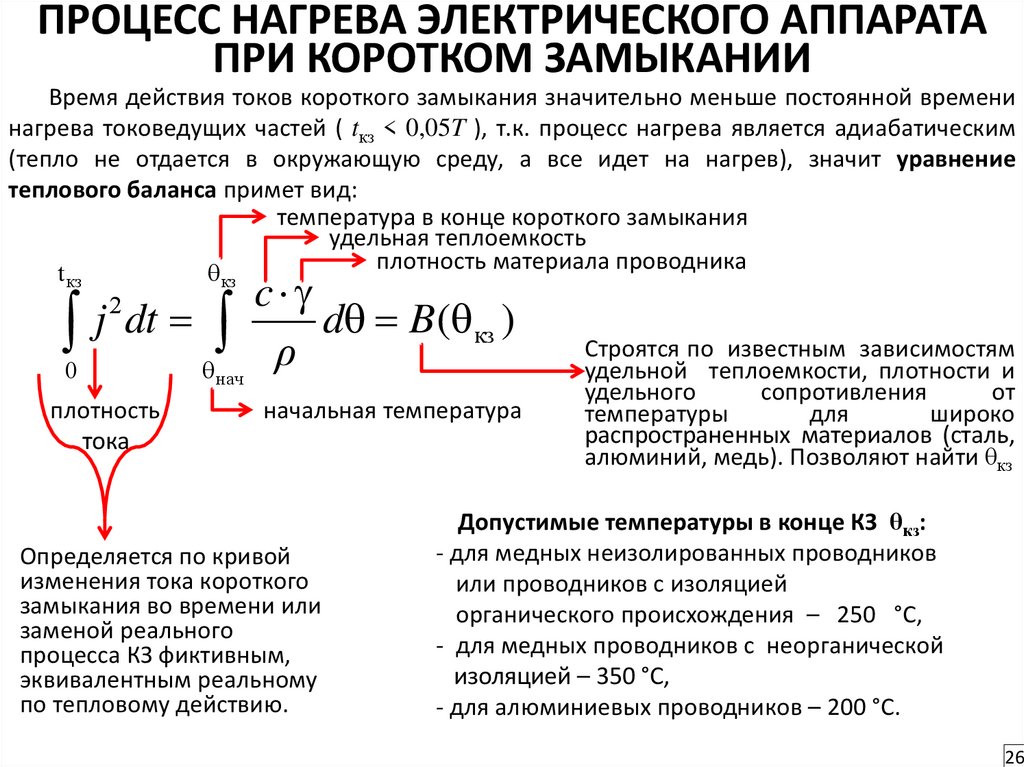
ПРОЦЕСС НАГРЕВА ЭЛЕКТРИЧЕСКОГО АППАРАТАПРИ КОРОТКОМ ЗАМЫКАНИИ
Время действия токов короткого замыкания значительно меньше постоянной времени
нагрева токоведущих частей ( tкз < 0,05T ), т.к. процесс нагрева является адиабатическим
(тепло не отдается в окружающую среду, а все идет на нагрев), значит уравнение
теплового баланса примет вид:
температура в конце короткого замыкания
удельная теплоемкость
плотность материала проводника
t кз
кз
2
кз
Строятся по известным зависимостям
удельной теплоемкости, плотности и
0
нач
удельного
сопротивления
от
плотность
начальная температура
температуры
для
широко
распространенных
материалов
(сталь,
тока
алюминий, медь). Позволяют найти θкз
j dt
c
d B( )
ρ
Определяется по кривой
изменения тока короткого
замыкания во времени или
заменой реального
процесса КЗ фиктивным,
эквивалентным реальному
по тепловому действию.
Допустимые температуры в конце КЗ θкз:
- для медных неизолированных проводников
или проводников с изоляцией
органического происхождения – 250 °С,
- для медных проводников с неорганической
изоляцией – 350 °С,
- для алюминиевых проводников – 200 °С.
26
27.
ТЕРМИЧЕСКАЯ СТОЙКОСТЬЭЛЕКТРИЧЕСКОГО АППАРАТА
Это способность выдерживать кратковременное тепловое действие токов
короткого замыкания без повреждений. Оценивается током термической стойкости.
При расчете берется наиболее тяжелый случай – к моменту начала короткого
замыкания элемент нагрет длительным током до предельно допустимой
температуры номинального режима.
Термическая стойкость аппарата и его токоведущих частей определяется
действующим значением тока термической стойкости, протекание которого в
течение времени термической стойкости (1, 3, 5 и 10 секунд) не вызывает нагрева
выше допустимых температур. Связь между токами термической стойкости для
различных времен выражается равенством
I12 1 I 32 3 I 52 5 I102 10 I t2 t
27
28.
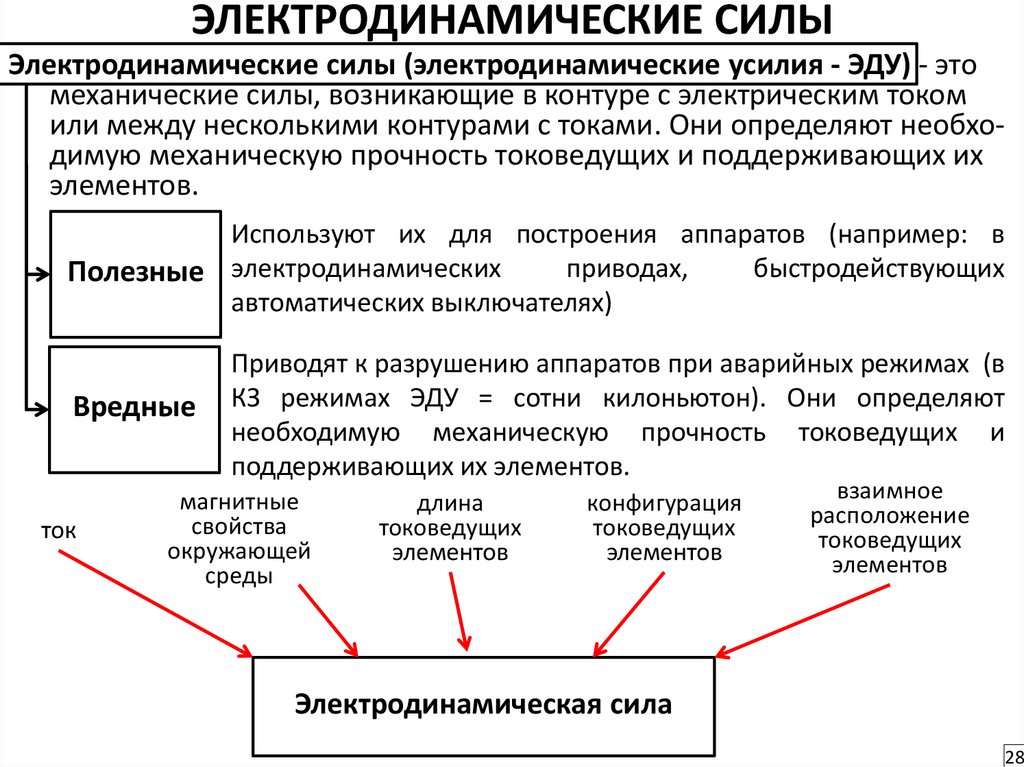
ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫЭлектродинамические силы (электродинамические усилия - ЭДУ) - это
механические силы, возникающие в контуре с электрическим током
или между несколькими контурами с токами. Они определяют необходимую механическую прочность токоведущих и поддерживающих их
элементов.
Используют их для построения аппаратов (например: в
приводах,
быстродействующих
Полезные электродинамических
автоматических выключателях)
Вредные
ток
Приводят к разрушению аппаратов при аварийных режимах (в
КЗ режимах ЭДУ = сотни килоньютон). Они определяют
необходимую механическую прочность токоведущих и
поддерживающих их элементов.
магнитные
свойства
окружающей
среды
длина
токоведущих
элементов
конфигурация
токоведущих
элементов
взаимное
расположение
токоведущих
элементов
Электродинамическая сила
28
29.
МЕТОДЫ РАСЧЕТА ЭЛЕКТРОДИНАМИЧЕСКИХ СИЛМетод удобен, если известна индукция в любой точке
Расчет ЭДУ
базируется на
проводника, для которого необходимо определить силу.
уравнении Ампера
l
(по закону Ампера)
F B i sin dl
0
Расчет ЭДУ
базируется на
энергетическом
методе
элемент проводника с током
угол между элементом
проводника и вектором индукции
индукция магнитного поля, создаваемого
другими проводниками
Метод используется при расчете электродинамических
сил токоведущих контуров, выполненных в виде витков
или катушек (дугогасительные обмотки контакторов,
автоматов, обмотки трансформаторов тока, реакторов)
W
F
x
электромагнитная энергия
координата, в направлении которой
действует определяемая сила
(обобщенная координата)
Изменение магнитной энергии находится при изменении лишь той координаты,
которую стремится изменить определяемая электродинамическая сила.
29
30.
УРАВНЕНИЕ ЭНЕРГЕТИЧЕСКОГО МЕТОДА ПРИОПРЕДЕЛЕНИИ ЭЛЕКТРОДИНАМИЧЕСКИХ СИЛ
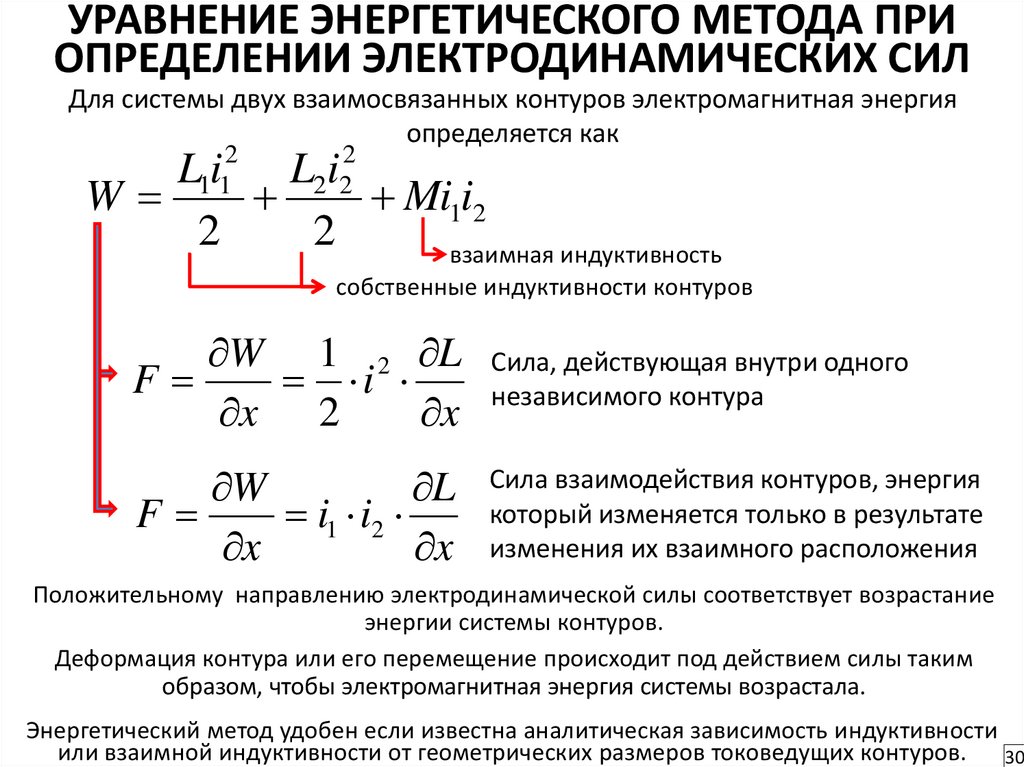
Для системы двух взаимосвязанных контуров электромагнитная энергия
определяется как
2
11
2
2 2
Li
Li
W
Mi1i2
2
2
взаимная индуктивность
собственные индуктивности контуров
W 1 2 L
F
i
x 2
x
Сила, действующая внутри одного
независимого контура
W
L
F
i1 i2
x
x
Сила взаимодействия контуров, энергия
который изменяется только в результате
изменения их взаимного расположения
Положительному направлению электродинамической силы соответствует возрастание
энергии системы контуров.
Деформация контура или его перемещение происходит под действием силы таким
образом, чтобы электромагнитная энергия системы возрастала.
Энергетический метод удобен если известна аналитическая зависимость индуктивности
или взаимной индуктивности от геометрических размеров токоведущих контуров. 30
31.
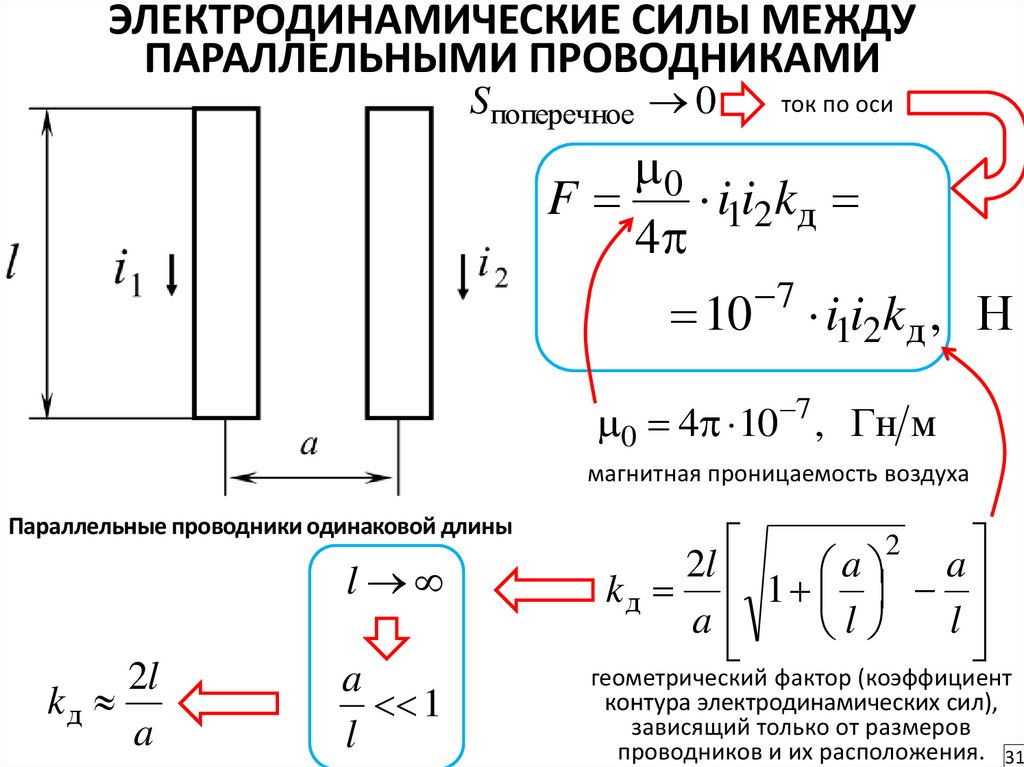
ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ МЕЖДУПАРАЛЛЕЛЬНЫМИ ПРОВОДНИКАМИ
Sпоперечное 0
ток по оси
0
F
i1i2kд
4
10
7
i1i2kд , Н
0 4 10 7 , Гн м
магнитная проницаемость воздуха
Параллельные проводники одинаковой длины
l
2l
kд
a
a
1
l
2
2l
a
a
kд 1
a
l
l
геометрический фактор (коэффициент
контура электродинамических сил),
зависящий только от размеров
проводников и их расположения. 31
32.
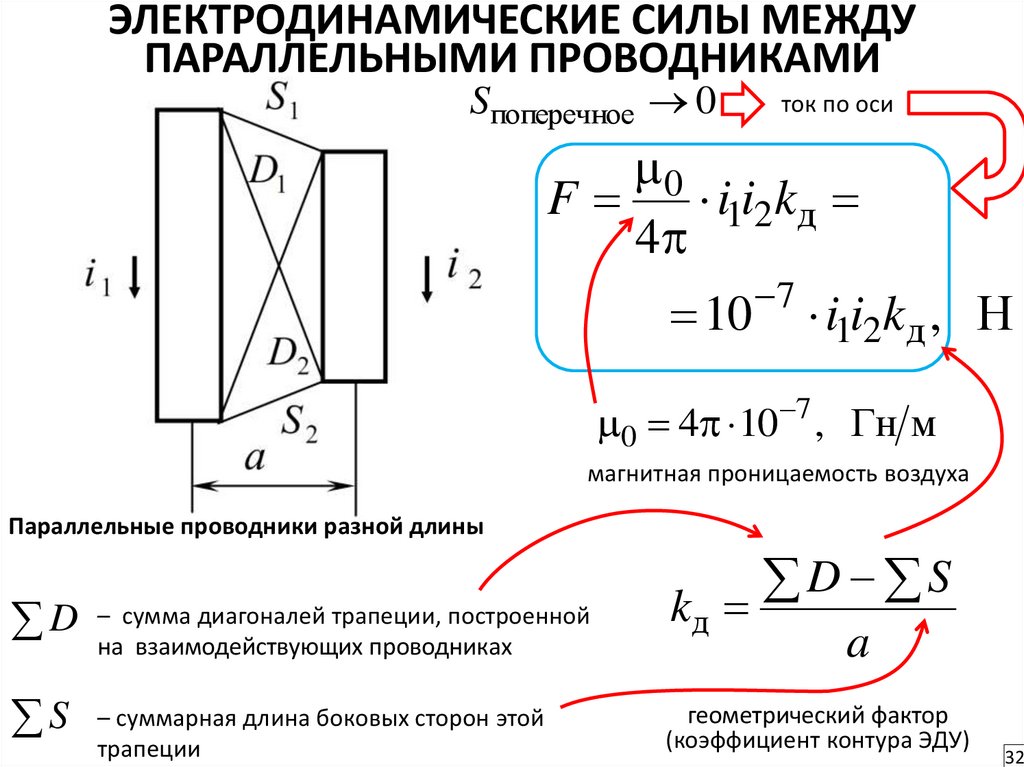
ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ МЕЖДУПАРАЛЛЕЛЬНЫМИ ПРОВОДНИКАМИ
Sпоперечное 0
ток по оси
0
F
i1i2kд
4
10
7
i1i2kд , Н
0 4 10 7 , Гн м
магнитная проницаемость воздуха
Параллельные проводники разной длины
D
S
– сумма диагоналей трапеции, построенной
на взаимодействующих проводниках
– суммарная длина боковых сторон этой
трапеции
D S
kд
a
геометрический фактор
(коэффициент контура ЭДУ)
32
33.
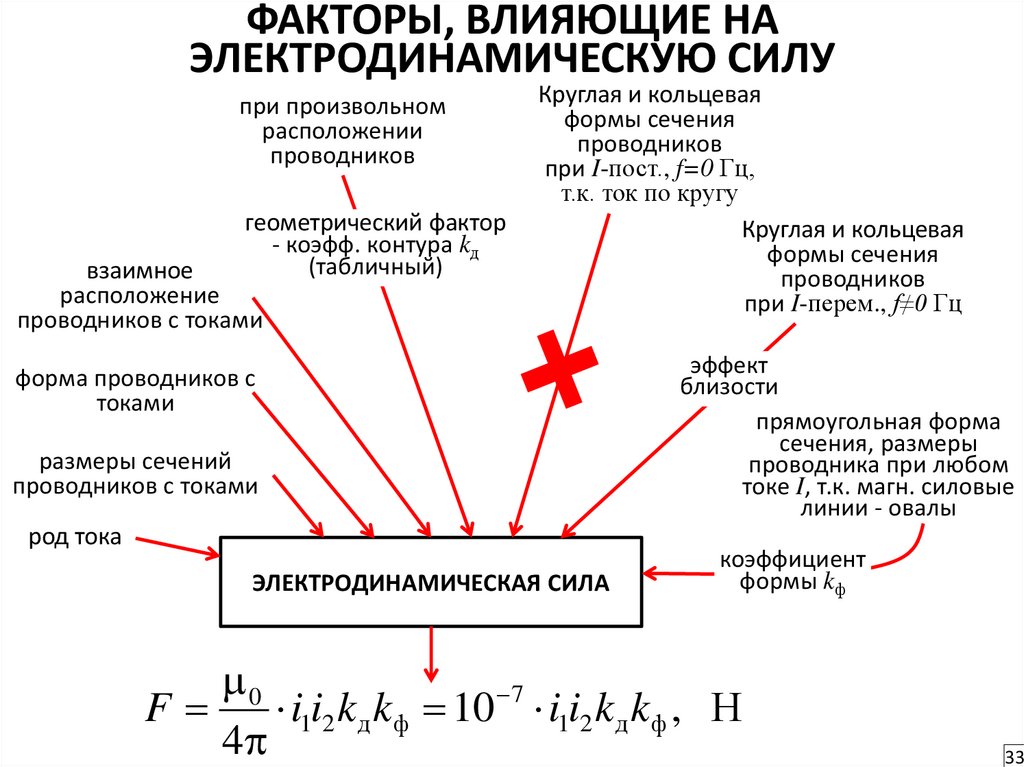
ФАКТОРЫ, ВЛИЯЮЩИЕ НАЭЛЕКТРОДИНАМИЧЕСКУЮ СИЛУ
при произвольном
расположении
проводников
геометрический фактор
- коэфф. контура kд
(табличный)
взаимное
расположение
проводников с токами
Круглая и кольцевая
формы сечения
проводников
при I-пост., f=0 Гц,
т.к. ток по кругу
Круглая и кольцевая
формы сечения
проводников
при I-перем., f≠0 Гц
форма проводников с
токами
размеры сечений
проводников с токами
род тока
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА
эффект
близости
прямоугольная форма
сечения, размеры
проводника при любом
токе I, т.к. магн. силовые
линии - овалы
коэффициент
формы kф
0
F
i1i2 k д kф 10 7 i1i2 k д kф , Н
4
33
34.
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛАКРУГОВОГО ВИТКА С ТОКОМ
При r R 0,25 индуктивность витка
8R
L 0 R ln
1,75 , Гн
r
ЭДУ, приложенная к окружности 2 R
стремится увеличить радиус витка
1 dL 0 2 8 R
FR i 2
i ln
0,75
2 dR 2 r
8R
2 i 10 ln
0,75 , Н
r
7
2
Сила, разрывающая виток (сила в
Если круговой виток находится в
сечении витка), - механическое
равномерном
магнитном
поле,
создаваемом другими проводниками, то напряжение растяжения
необходимо учитывать дополнительную
силу,
обусловленную взаимодействием
тока витка с внешним полем.
8R
Fq i 10 ln
0,75 , Н
r
2
7
34
35.
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛАМЕЖДУ ВИТКАМИ КАТУШКИ
При h 2R1 2R2 ваимоиндуктивность
8R1
M 0 R1 ln
2 , Гн
2
2
h c
Вертикальная составляющая
электродинамической силы Fh
витка: если потоки, создаваемые
токами, направлены в одну
сторону, то витки притягиваются,
если в разные стороны –
отталкиваться.
dM
4 R1h 7
Fh i1i2
i1i2 2
10 , Н
2
dh
h c
Радиальная составляющая силы от собственного тока и от взаимодействия
этого тока с продольной составляющей поля другого витка
dW 1 2 dL
dM
FR
i
i1i2
, Н
dR 2 dR
dR
R R1 для первого витка
R R2 для второго витка
35
36.
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛАКАТУШКИ
увеличение
среднего
диаметра
Для катушки, имеющей w витков,
электродинамическая сила,
разрывающая виток
8R
Fq (iw) 10 ln
0,75 , Н
r
2
7
сжатие по
Проводники катушки обтекаются током
высоте одного направления, при этом возникают
силы притяжения между отдельными
витками.
В результате
катушка
подвергается действию ЭДУ, сжимающих
ее по высоте и увеличивающих средний
диаметр.
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА
МЕЖДУ ЦИЛИНДРИЧЕСКИМИ КАТУШКАМИ
dM
F i1i2
, Н
dh
Производную dM/dx определяют с
помощью семейства кривых Двайта или Хака
в зависимости от величины h/D (отношения
высоты к среднему диаметру катушки)
36
37.
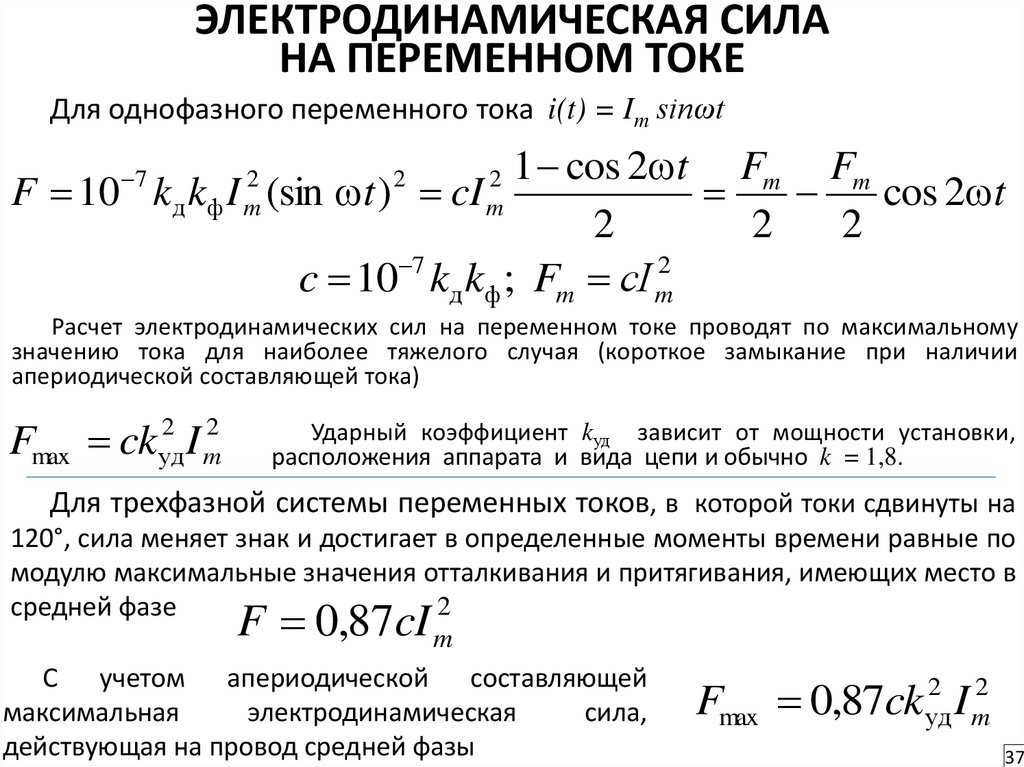
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛАНА ПЕРЕМЕННОМ ТОКЕ
Для однофазного переменного тока i(t) = Im sinωt
1 cos 2 t Fm Fm
F 10 k k I (sin t ) cI
cos 2 t
2
2
2
c 10 7 kд kф ; Fm сI m2
7
2
д ф m
2
2
m
Расчет электродинамических сил на переменном токе проводят по максимальному
значению тока для наиболее тяжелого случая (короткое замыкание при наличии
апериодической составляющей тока)
2 2
Fmax ckуд
Im
Ударный коэффициент kуд зависит от мощности установки,
расположения аппарата и вида цепи и обычно k = 1,8.
Для трехфазной системы переменных токов, в которой токи сдвинуты на
120°, сила меняет знак и достигает в определенные моменты времени равные по
модулю максимальные значения отталкивания и притягивания, имеющих место в
2
средней фазе
F 0,87cI m
С учетом апериодической составляющей
максимальная
электродинамическая
сила,
действующая на провод средней фазы
2 2
Fmax 0,87ckуд
Im
37
38.
ЭЛЕКТРОДИНАМИЧЕСКАЯ СТОЙКОСТЬ- это способность противостоять без повреждений и нарушений
функционального состояния механическим силам, возникающим при
протекании токов.
Характеризуется током электродинамической стойкости - наибольшим
значением тока, который аппарат может выдержать во включенном состоянии
без механических или электрических повреждений и без произвольного
отключения.
Ток электродинамической стойкости электрического аппарата должен быть
больше ударного тока короткого замыкания для данных условий работы.
Электродинамическая стойкость выражается либо амплитудным значением тока,
при котором механические напряжения в элементах аппарата не выходят за
пределы допустимых величин, либо кратностью тока относительно амплитуды
номинального тока.
При оценке электродинамической стойкости необходимо учитывать степень
защиты аппарата, так как для аппаратов открытого исполнения существуют
дополнительные нагрузки от воздействия внешних факторов. В этом случае
результирующая нагрузка на изоляторы и изоляционные детали берется в 3 раза
меньше разрушающей, для аппаратов герметичного исполнения – в 1,5–1,7 раза.
В случае когда частота переменной составляющей электродинамической силы
близка к собственной
частоте
механических
колебаний, даже
при
сравнительно небольших силах возможно разрушение аппарата вследствие
явлений резонанса. Возможность резонанса стремятся исключить.
38
39.
МАГНИТНЫЕ ЦЕПИ ЭЛЕКТРИЧЕСКИХ АППАРАТОВМагнитная цепь - совокупность тел и сред, создающая ориентированный
магнитный поток при наличии магнитодвижущей силы.
магнитные цепи с большим потоком
рассеяния: пренебрегать нельзя –
учитывается всегда
магнитные цепи с малым потоком
рассеяния: можно пренебречь, если поток
рассеяния мал по сравнению с основным
потоком, когда
магнитопровод замкнут
на пути основного потока имеется
воздушный зазор сравнительно
малой величины, а магнитная цепь
насыщена незначительно
размагничивающее действие
вторичной обмотки сравнительно
невелико
Применение
электромагнитные устройства
контакторы
автоматы
приводы выключателей
тормозные электромагниты
тяговые электромагниты
подъемные электромагниты
реле
датчики
электромагнитные муфты
дросселя
и др.
39
40.
МЕТОДЫ РАСЧЕТА МАГНИТНЫХ ЦЕПЕЙЭЛЕКТРИЧЕСКИХ АППАРАТОВ
учет нелинейной магнитной
характеристики – петли
Гистерезиса
Аналитические
методы
Трудности
Графоаналитические
методы
учет потерь в стали
учет размагничивающего
действия магнитных экранов
Цель - расчет магнитной цепи
Прямая задача
Определение магнитнодвижущей силы
обмотки, необходимой для создания
заданного рабочего потока
Определение рабочего магнитного
Обратная задача потока по известной магнитнодвижущей
силе обмотки
Основа
Законы Ома для магнитных цепей
Законы Кирхгофа для магнитных цепей
40
41.
ЗАКОНЫ, ПРИМЕНЯЕМЫЕ ПРИ РАСЧЕТЕМАГНИТНЫХ ЦЕПЕЙ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
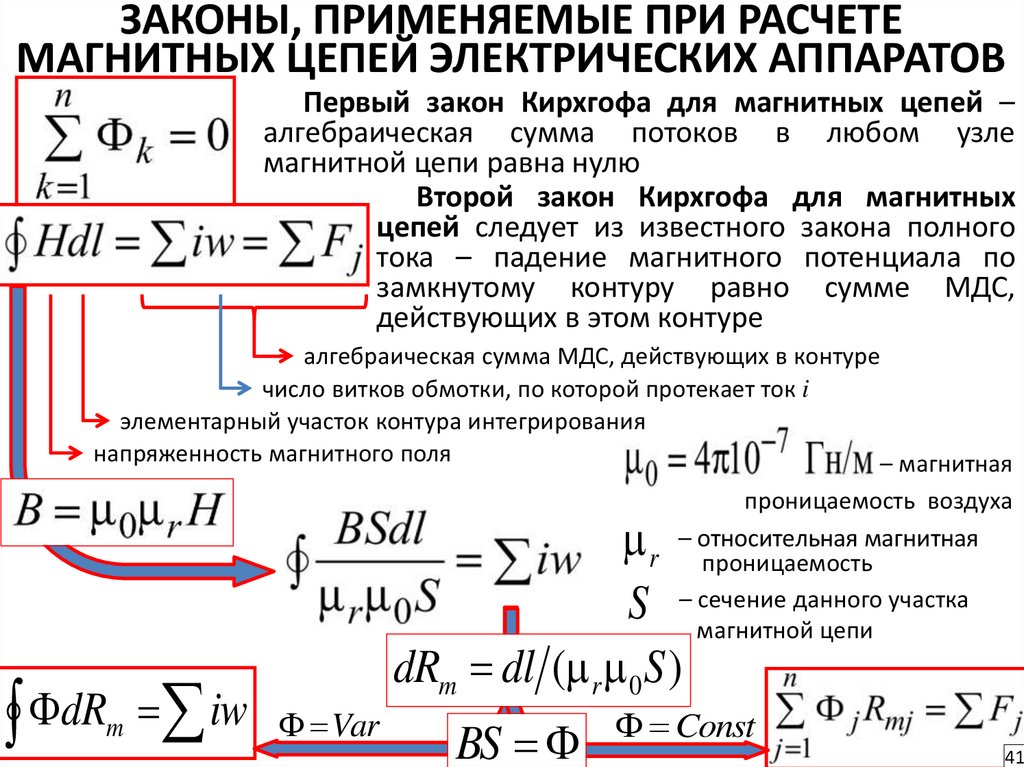
Первый закон Кирхгофа для магнитных цепей –
алгебраическая сумма потоков в любом узле
магнитной цепи равна нулю
Второй закон Кирхгофа для магнитных
цепей следует из известного закона полного
тока – падение магнитного потенциала по
замкнутому контуру равно сумме МДС,
действующих в этом контуре
алгебраическая сумма МДС, действующих в контуре
число витков обмотки, по которой протекает ток i
элементарный участок контура интегрирования
напряженность магнитного поля
– магнитная
проницаемость воздуха
– относительная магнитная
r
проницаемость
– сечение данного участка
магнитной цепи
dR iw
m
S
dRm dl ( r 0 S )
Var
BS
Const
41
42.
ЗАКОНЫ, ПРИМЕНЯЕМЫЕ ПРИ РАСЧЕТЕМАГНИТНЫХ ЦЕПЕЙ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
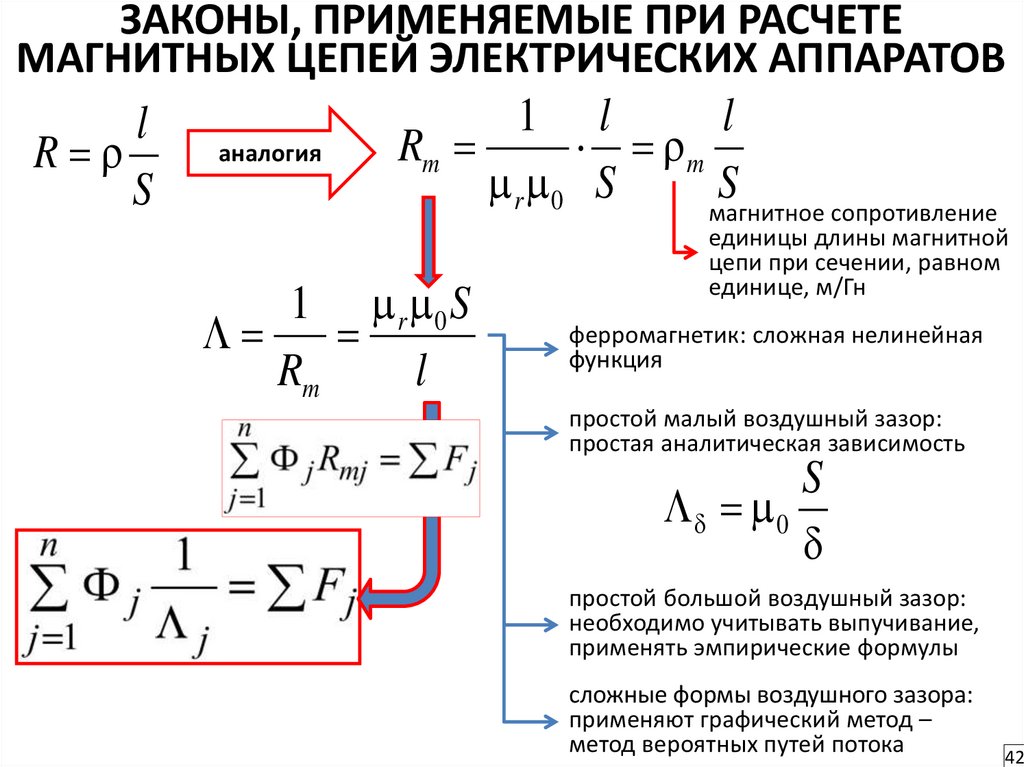
1 l
l
l
Rm
m
аналогия
R
r 0 S
S
S
магнитное сопротивление
1 r 0 S
Rm
l
единицы длины магнитной
цепи при сечении, равном
единице, м/Гн
ферромагнетик: сложная нелинейная
функция
простой малый воздушный зазор:
простая аналитическая зависимость
S
0
простой большой воздушный зазор:
необходимо учитывать выпучивание,
применять эмпирические формулы
сложные формы воздушного зазора:
применяют графический метод –
метод вероятных путей потока
42
43.
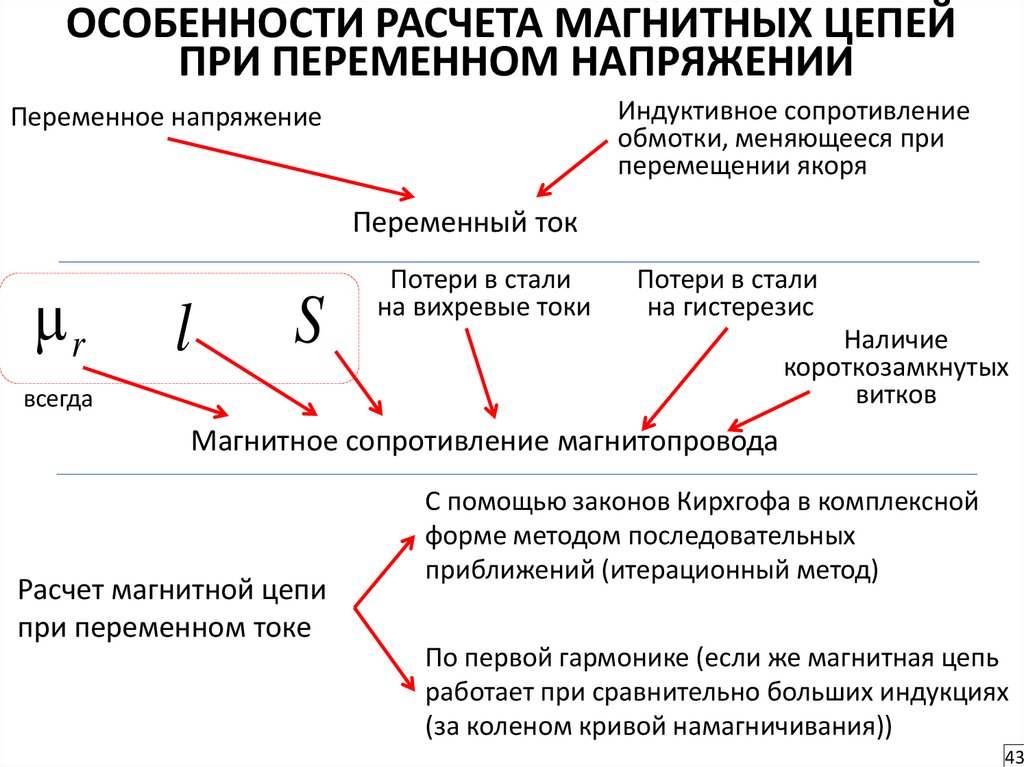
ОСОБЕННОСТИ РАСЧЕТА МАГНИТНЫХ ЦЕПЕЙПРИ ПЕРЕМЕННОМ НАПРЯЖЕНИИ
Индуктивное сопротивление
обмотки, меняющееся при
перемещении якоря
Переменное напряжение
Переменный ток
r
l
S
Потери в стали
на вихревые токи
Потери в стали
на гистерезис
Наличие
короткозамкнутых
витков
всегда
Магнитное сопротивление магнитопровода
Расчет магнитной цепи
при переменном токе
С помощью законов Кирхгофа в комплексной
форме методом последовательных
приближений (итерационный метод)
По первой гармонике (если же магнитная цепь
работает при сравнительно больших индукциях
(за коленом кривой намагничивания))
43
44.
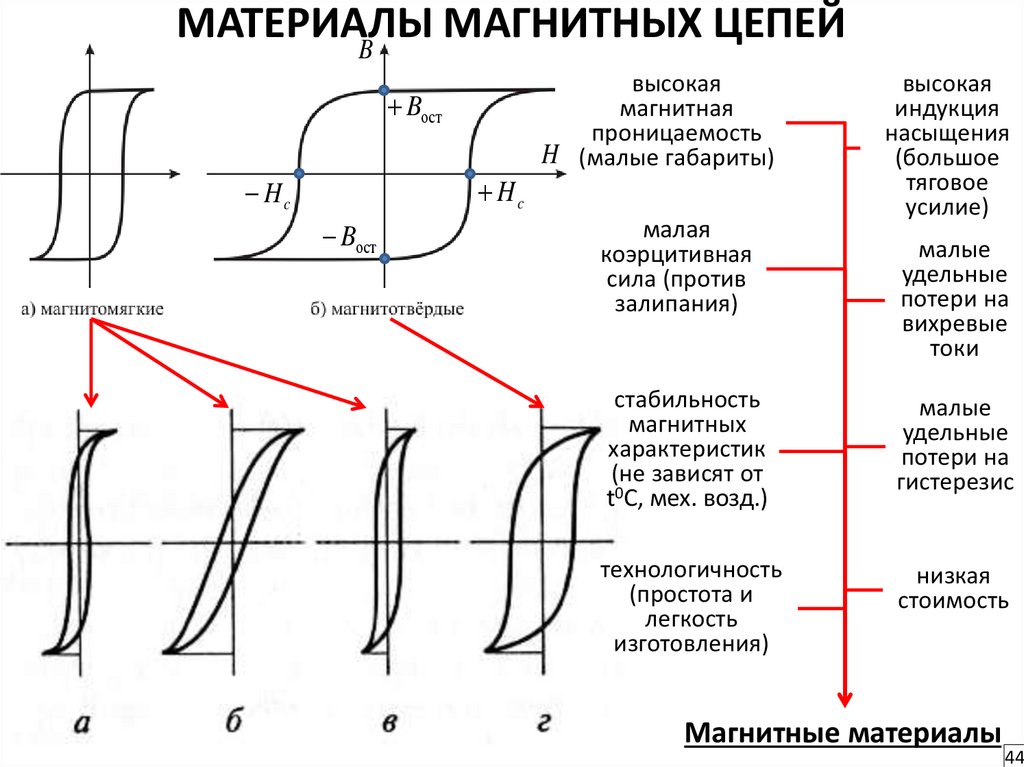
МАТЕРИАЛЫМАГНИТНЫХ
ЦЕПЕЙ
B
высокая
магнитная
проницаемость
H (малые габариты)
Bост
Hc
Hc
Bост
малая
коэрцитивная
сила (против
залипания)
высокая
индукция
насыщения
(большое
тяговое
усилие)
малые
удельные
потери на
вихревые
токи
стабильность
магнитных
характеристик
(не зависят от
t0C, мех. возд.)
малые
удельные
потери на
гистерезис
технологичность
(простота и
легкость
изготовления)
низкая
стоимость
Магнитные материалы
44
45.
ЭЛЕКТРОМАГНИТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВЭлектромагнитные устройства служат для создания магнитного поля с
помощью обмотки, обтекаемой электрическим током.
Электромагнитные механизмы (ЭММ) – электромагнитные устройства, в
которых магнитное поле используют для создания электромагнитных сил,
вызывающих перемещение подвижных частей и совершающих механическую
работу, при которой подвижные части движутся по заданной траектории и
преодолевают
силы
сопротивления,
определяемые
механической
характеристикой.
Электромагниты (ЭМ) – электромагнитные механизмы,
магнитную систему из ферромагнитных материалов
имеющие
Применение электромагнитов
электромагнитные устройства
контакторы
подъемные электромагниты
автоматы
датчики
приводы выключателей
электромагнитные муфты
тормозные электромагниты
тяговые электромагниты
реле
дросселя
и др.
45
46.
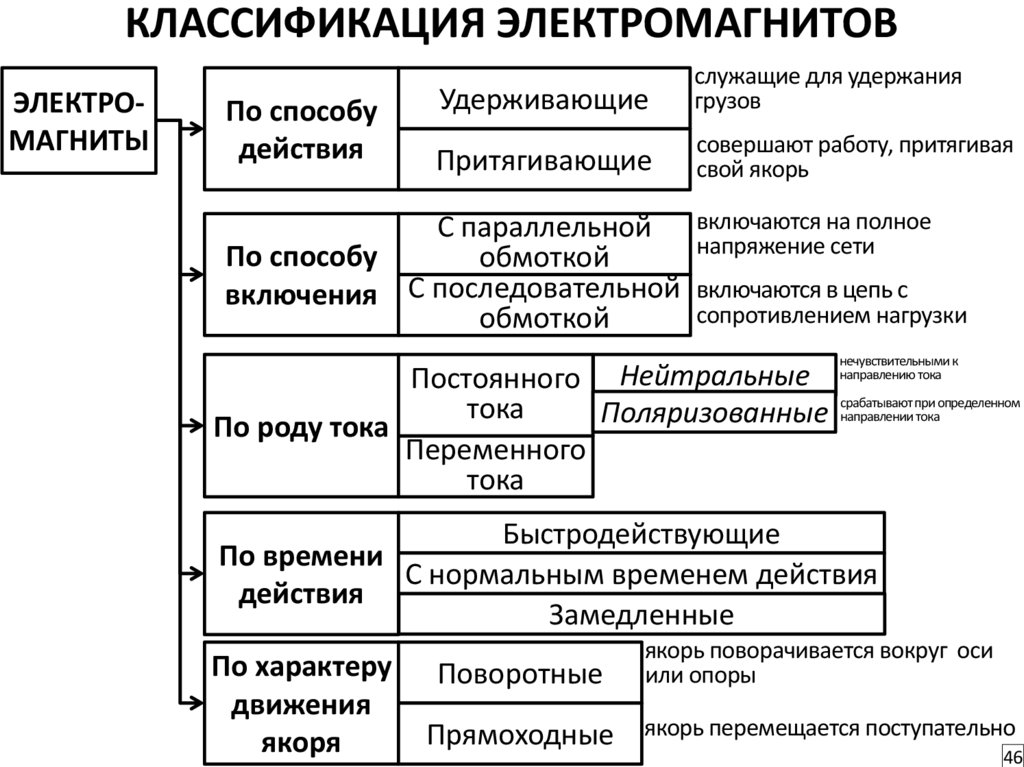
КЛАССИФИКАЦИЯ ЭЛЕКТРОМАГНИТОВЭЛЕКТРОМАГНИТЫ
По способу
действия
Удерживающие
служащие для удержания
грузов
Притягивающие
совершают работу, притягивая
свой якорь
С параллельной
По способу
обмоткой
включения С последовательной
обмоткой
включаются на полное
напряжение сети
включаются в цепь с
сопротивлением нагрузки
Постоянного Нейтральные
тока
Поляризованные
По роду тока
Переменного
тока
нечувствительными к
направлению тока
срабатывают при определенном
направлении тока
Быстродействующие
По времени
С нормальным временем действия
действия
Замедленные
По характеру
движения
якоря
Поворотные
якорь поворачивается вокруг оси
или опоры
Прямоходные якорь перемещается поступательно
46
47.
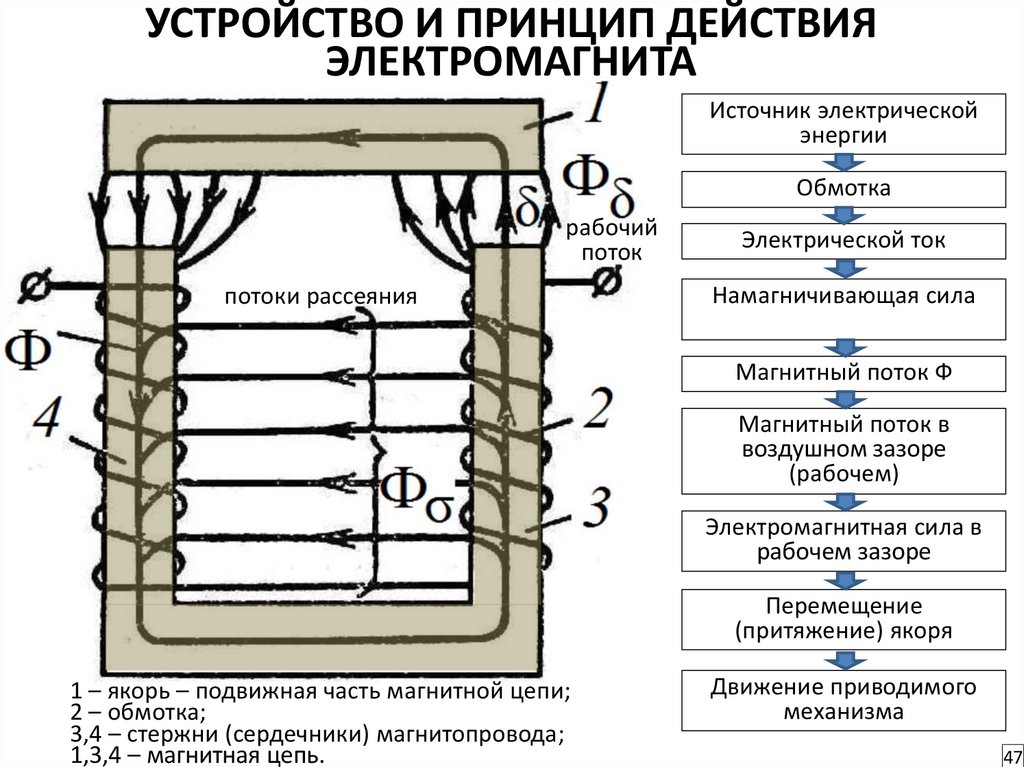
УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯЭЛЕКТРОМАГНИТА
Источник электрической
энергии
Обмотка
рабочий
поток
потоки рассеяния
Электрической ток
Намагничивающая сила
Магнитный поток Ф
Магнитный поток в
воздушном зазоре
(рабочем)
Электромагнитная сила в
рабочем зазоре
Перемещение
(притяжение) якоря
1 – якорь – подвижная часть магнитной цепи;
2 – обмотка;
3,4 – стержни (сердечники) магнитопровода;
1,3,4 – магнитная цепь.
Движение приводимого
механизма
47
48.
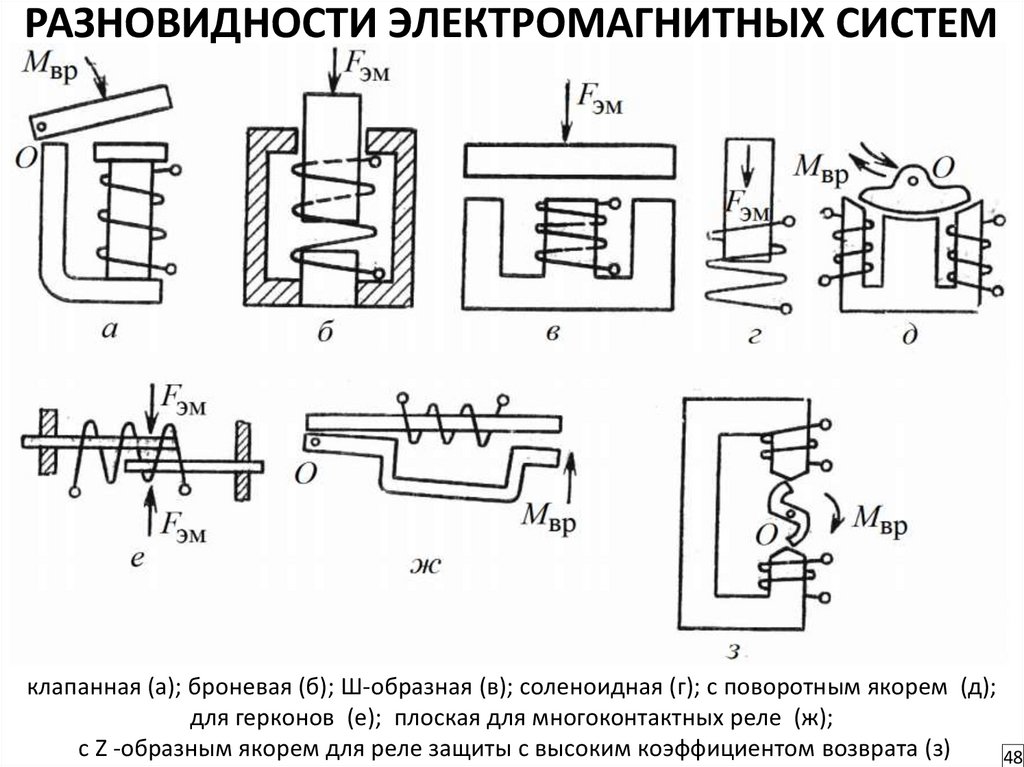
РАЗНОВИДНОСТИ ЭЛЕКТРОМАГНИТНЫХ СИСТЕМклапанная (а); броневая (б); Ш-образная (в); соленоидная (г); с поворотным якорем (д);
для герконов (е); плоская для многоконтактных реле (ж);
с Z -образным якорем для реле защиты с высоким коэффициентом возврата (з)
48
49.
ЭЛЕКТРОМАГНИТНАЯ СИЛАРасчет электромагнитной силы, развиваемой электромагнитом постоянного
тока, базируется на уравнении энергетического баланса электромагнита
электрическая энергия, преобразованная
электромагнитом в магнитную при изменении
потокосцепления за время dt
потери в активном сопротивлении
потери от вихревых токов≈0, т.к. малы
величина электрической энергии, поступающей в систему за время dt
МЕТОДЫ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫ
значение
потокосцепления
к моменту времени
Аналитические методы
Графоаналитические методы
49
50.
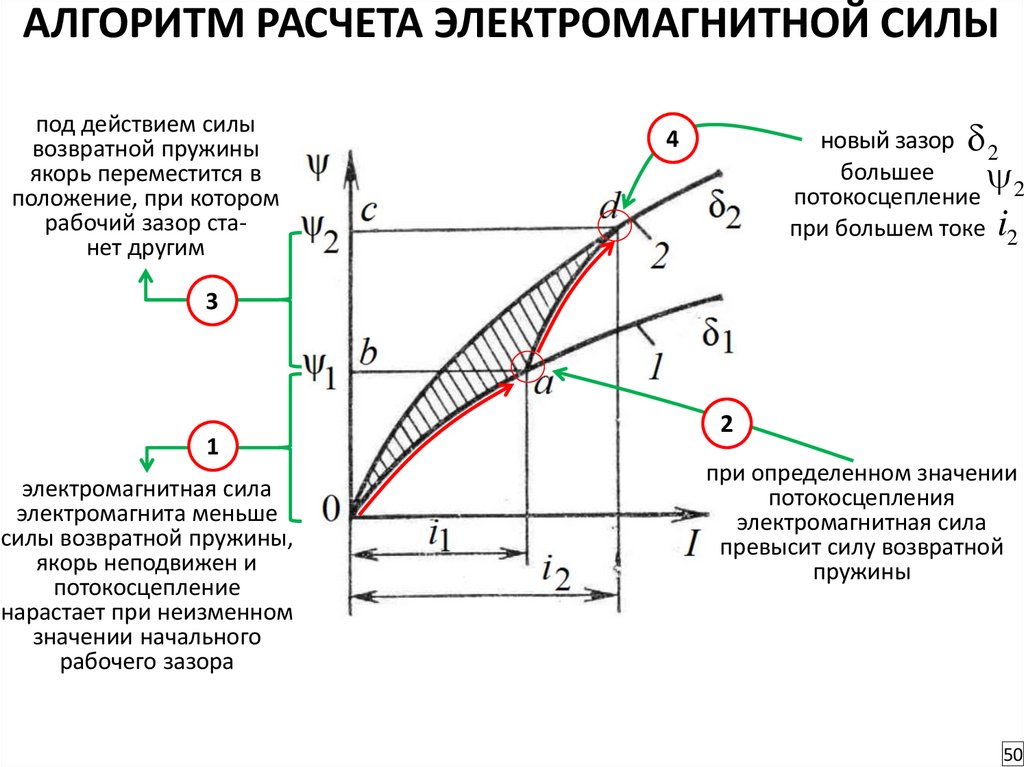
АЛГОРИТМ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫпод действием силы
возвратной пружины
якорь переместится в
положение, при котором
рабочий зазор станет другим
новый зазор 2
большее
потокосцепление 2
при большем токе i2
4
3
1
электромагнитная сила
электромагнита меньше
силы возвратной пружины,
якорь неподвижен и
потокосцепление
нарастает при неизменном
значении начального
рабочего зазора
2
при определенном значении
потокосцепления
электромагнитная сила
превысит силу возвратной
пружины
50
51.
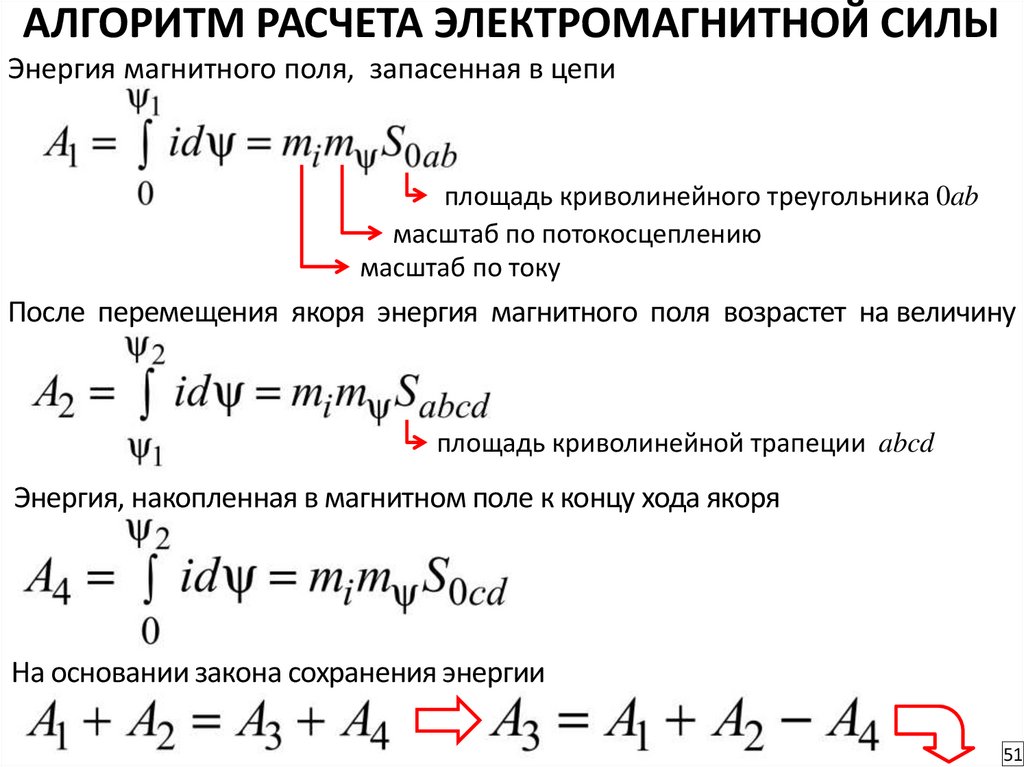
АЛГОРИТМ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫЭнергия магнитного поля, запасенная в цепи
площадь криволинейного треугольника 0ab
масштаб по потокосцеплению
масштаб по току
После перемещения якоря энергия магнитного поля возрастет на величину
площадь криволинейной трапеции abcd
Энергия, накопленная в магнитном поле к концу хода якоря
На основании закона сохранения энергии
51
52.
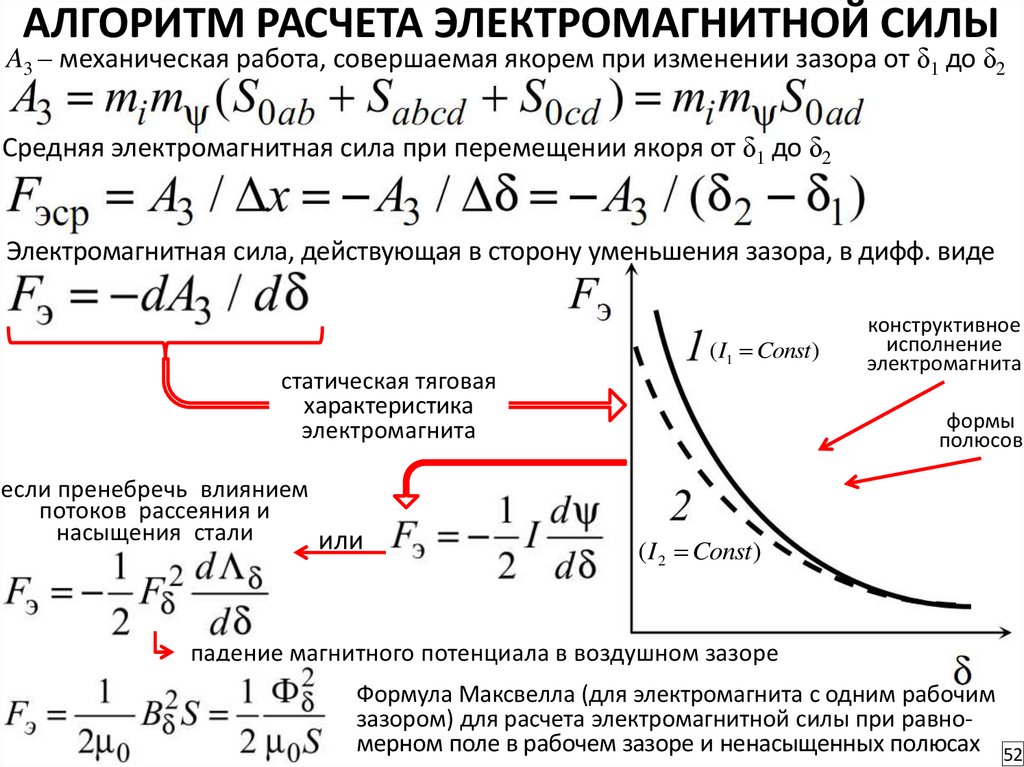
АЛГОРИТМ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫA3 – механическая работа, совершаемая якорем при изменении зазора от δ1 до δ2
Средняя электромагнитная сила при перемещении якоря от δ1 до δ2
Электромагнитная сила, действующая в сторону уменьшения зазора, в дифф. виде
( I1 Const )
статическая тяговая
характеристика
электромагнита
если пренебречь влиянием
потоков рассеяния и
насыщения стали
или
конструктивное
исполнение
электромагнита
формы
полюсов
( I 2 Const )
падение магнитного потенциала в воздушном зазоре
Формула Максвелла (для электромагнита с одним рабочим
зазором) для расчета электромагнитной силы при равномерном поле в рабочем зазоре и ненасыщенных полюсах 52
53.
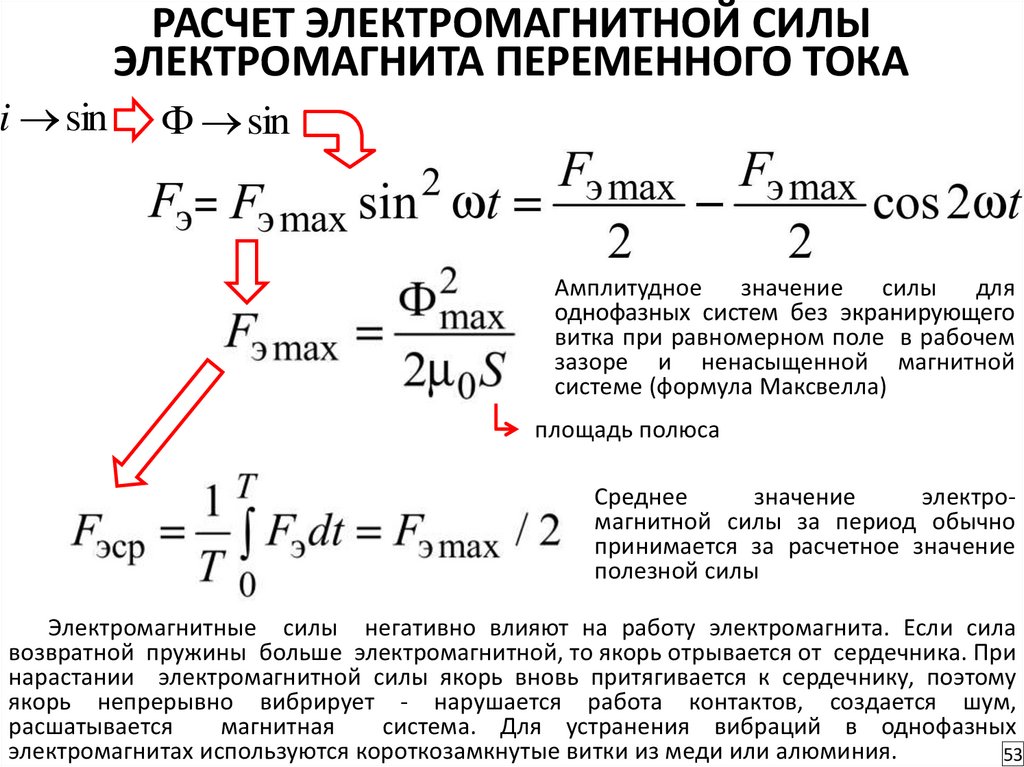
РАСЧЕТ ЭЛЕКТРОМАГНИТНОЙ СИЛЫЭЛЕКТРОМАГНИТА ПЕРЕМЕННОГО ТОКА
i sin
sin
Амплитудное
значение
силы
для
однофазных систем без экранирующего
витка при равномерном поле в рабочем
зазоре и ненасыщенной магнитной
системе (формула Максвелла)
площадь полюса
Среднее
значение
электромагнитной силы за период обычно
принимается за расчетное значение
полезной силы
Электромагнитные силы негативно влияют на работу электромагнита. Если сила
возвратной пружины больше электромагнитной, то якорь отрывается от сердечника. При
нарастании электромагнитной силы якорь вновь притягивается к сердечнику, поэтому
якорь непрерывно вибрирует - нарушается работа контактов, создается шум,
расшатывается
магнитная
система. Для устранения вибраций в однофазных
электромагнитах используются короткозамкнутые витки из меди или алюминия.
53
54.
ДИНАМИКА ЭЛЕКТРОМАГНИТАРЕЖИМЫ РАБОТЫ ЭЛЕКТРОМАГНИТА
Статический режим
Работа тормозных и удерживающих электромагнитов
Динамический режим
Процесс срабатывания имеет динамический характер
ДИНАМИКА ПРОЦЕССА СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА
включения обмотки
электромагнита
нарастание магнитного потока,
пока электромагнитная сила не
равна противодействующей
электромагнитная сила равна
противодействующей
магнитный поток продолжает
изменяться по закону,
определяемому параметрами
электромагнита и
противодействующей силой
якорь достигает конечного
положения
якорь начинает двигаться
ток и магнитный поток
изменяются, пока не достигнут
установившихся значений
ток продолжает изменяться по
закону, определяемому
параметрами электромагнита и
противодействующей силой
ток и магнитный поток
достигают установившихся
значений
54
55.
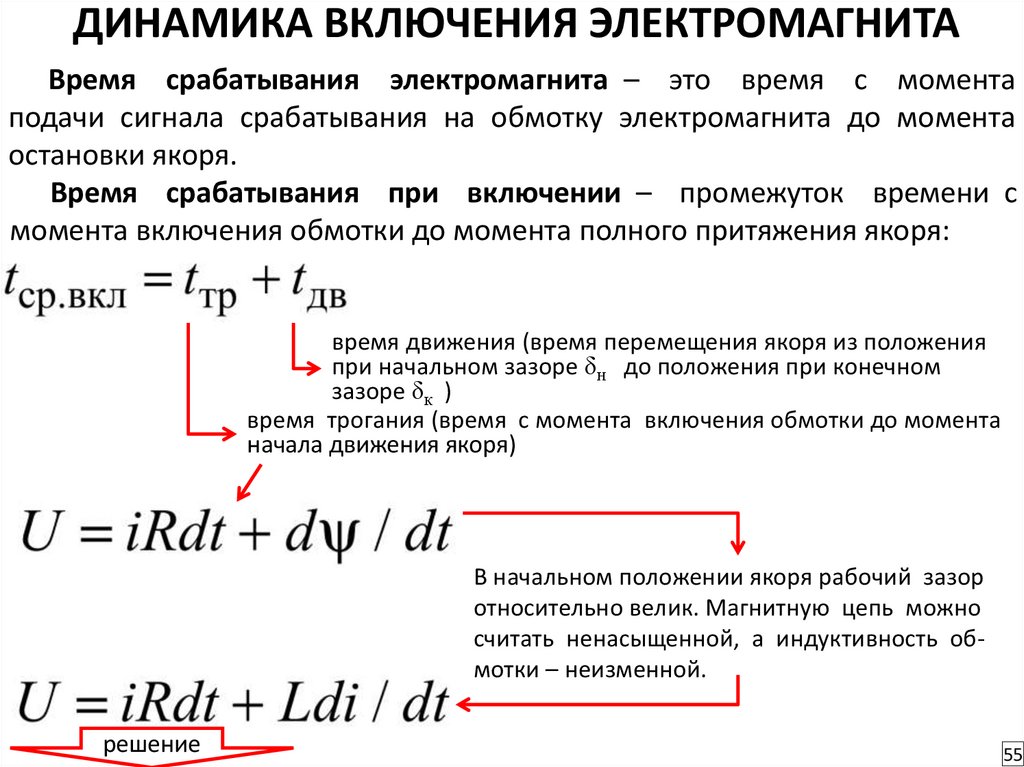
ДИНАМИКА ВКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТАВремя срабатывания электромагнита – это время с момента
подачи сигнала срабатывания на обмотку электромагнита до момента
остановки якоря.
Время срабатывания при включении – промежуток времени с
момента включения обмотки до момента полного притяжения якоря:
время движения (время перемещения якоря из положения
при начальном зазоре δн до положения при конечном
зазоре δк )
время трогания (время с момента включения обмотки до момента
начала движения якоря)
В начальном положении якоря рабочий зазор
относительно велик. Магнитную цепь можно
считать ненасыщенной, а индуктивность обмотки – неизменной.
решение
55
56.
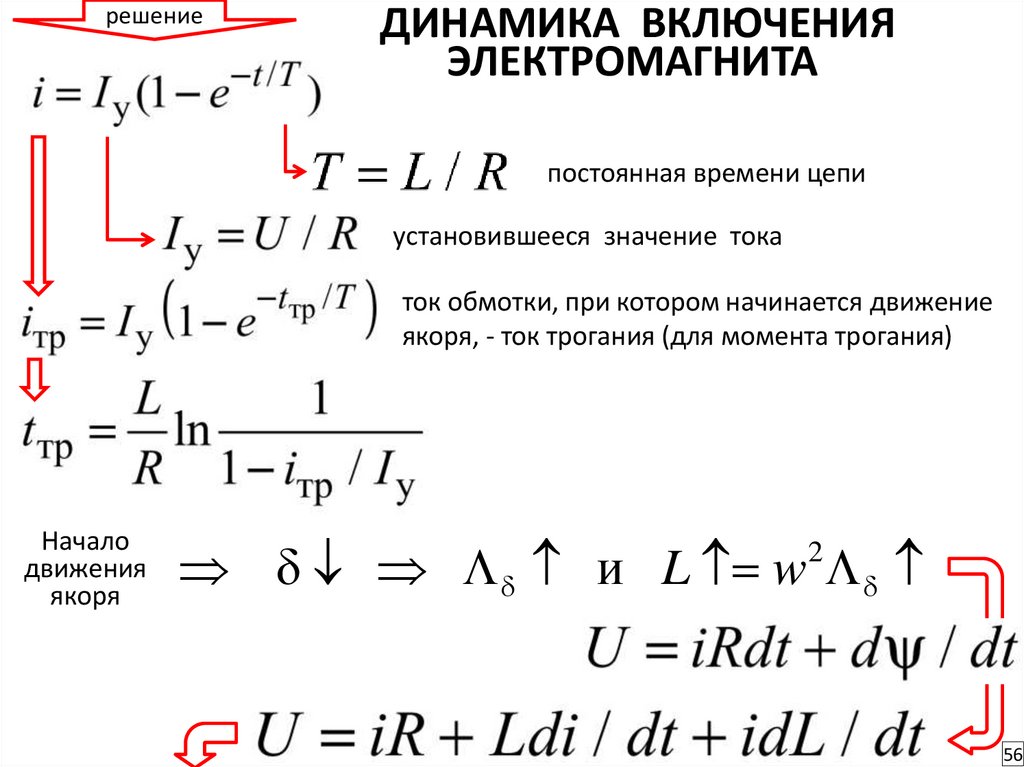
решениеДИНАМИКА ВКЛЮЧЕНИЯ
ЭЛЕКТРОМАГНИТА
постоянная времени цепи
установившееся значение тока
ток обмотки, при котором начинается движение
якоря, - ток трогания (для момента трогания)
Начало
движения
якоря
и L w
2
56
57.
ДИНАМИКА ВКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТАПри движении якоря → dL/dt>0 → рост i замедляется →
→ i и di/dt начинают уменьшаться (чем больше скорость
движения якоря, тем больше спад тока)
постоянная времени при
конечном зазоре
Ток
растет,
i<Iу →
якорь
трогается Fдин<Fстат
работа, произведенная
электромагнитом
уравнения, описывающие физические процессы в электромагните
кинетическая энергия
подвижных частей якоря
энергия сил
противодействия
путь, пройденный якорем
масса подвижных частей,
противодействующая сила
скорость перемещения
приведенная к зазору
якоря, приведенная к зазору пружины, приведенная к зазору 57
58.
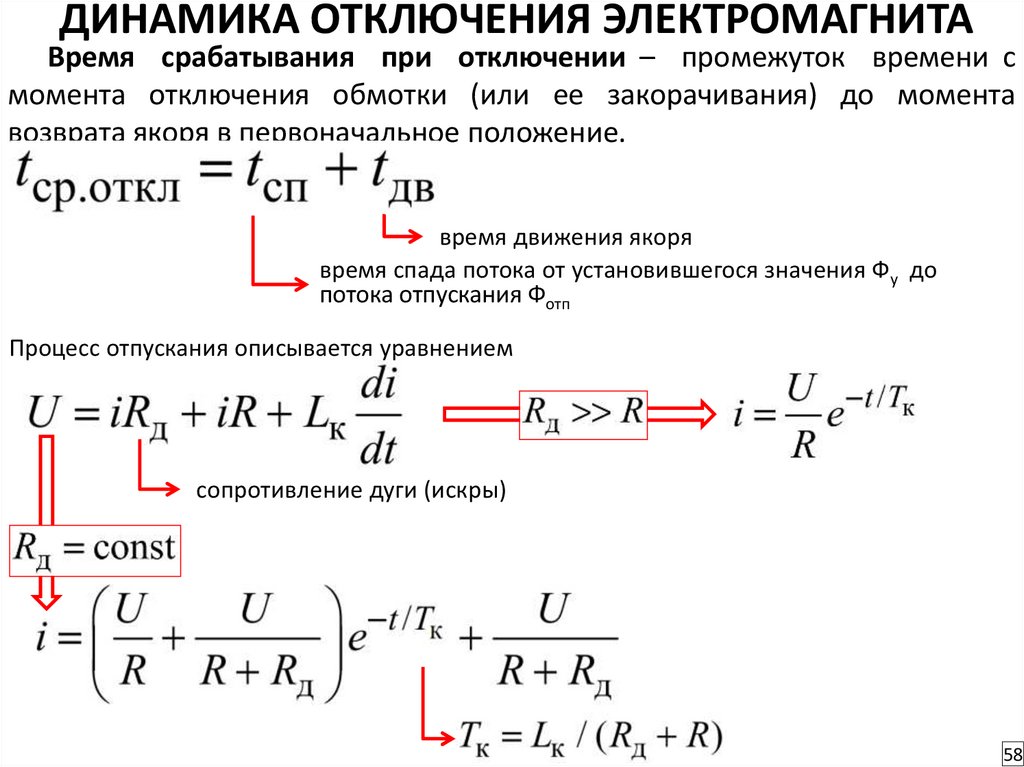
ДИНАМИКА ОТКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТАВремя срабатывания при отключении – промежуток времени с
момента отключения обмотки (или ее закорачивания) до момента
возврата якоря в первоначальное положение.
время движения якоря
время спада потока от установившегося значения Фу до
потока отпускания Фотп
Процесс отпускания описывается уравнением
сопротивление дуги (искры)
58
59.
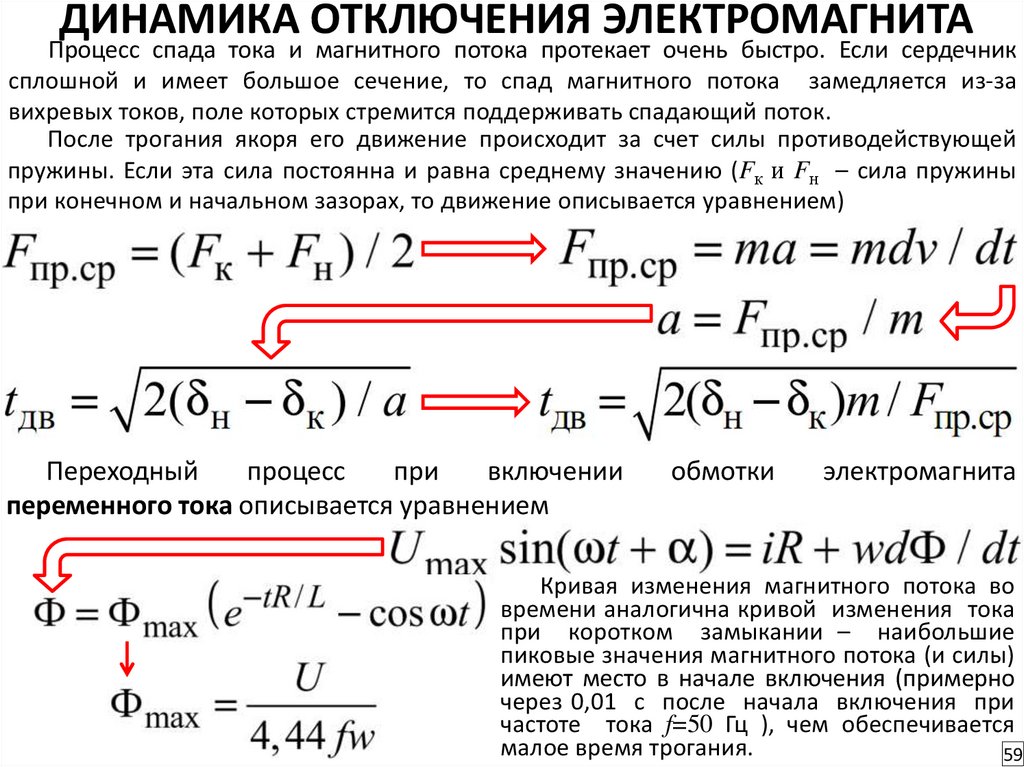
ДИНАМИКА ОТКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТАПроцесс спада тока и магнитного потока протекает очень быстро. Если сердечник
сплошной и имеет большое сечение, то спад магнитного потока замедляется из-за
вихревых токов, поле которых стремится поддерживать спадающий поток.
После трогания якоря его движение происходит за счет силы противодействующей
пружины. Если эта сила постоянна и равна среднему значению (Fк и Fн – сила пружины
при конечном и начальном зазорах, то движение описывается уравнением)
Переходный
процесс
при
включении
переменного тока описывается уравнением
обмотки
электромагнита
Кривая изменения магнитного потока во
времени аналогична кривой изменения тока
при коротком замыкании – наибольшие
пиковые значения магнитного потока (и силы)
имеют место в начале включения (примерно
через 0,01 с после начала включения при
частоте тока f=50 Гц ), чем обеспечивается
малое время трогания.
59
60.
УСКОРЕНИЕ И ЗАМЕДЛЕНИЕ СРАБАТЫВАНИЯМетоды изменения
ЭЛЕКТРОМАГНИТА
Изменение конструкции электромагнита
Изменение параметров электромагнита
Применение специальных схем
ИЗМЕНЕНИЕ СКОРОСТИ
СРАБАТЫВАНИЯ ЭА
Уменьшение времени
срабатывания ЭА
уменьшение вихревых
токов в магнитопроводе
изменение конструкции
Замедление
срабатывания ЭА
уменьшают ход
якоря
демпфирование: короткозамкнутая
(экранирующая) обмотка - медная
или алюминиевая гильза
размещается на магнитопроводе
демпфирование с присоединением якоря
электромагнита к демпфирующему
устройству, создающему
противодействующую силу,
пропорциональную скорости перемещения
гидравлические
Применение
устройств, пневматические
замедляющих
срабатывание механическими
уменьшают массу
якоря
уменьшают массу
связанных с якорем
подвижных частей
уменьшают трение
в осях якоря
уменьшают трение
в опорах якоря
анкерные
часовые механизмы
применение
магнитных
материалов с
высоким
электрическим
сопротивлением
в массивных частях
делают
специальные
прорези,
пересекающие
пути вихревых
токов
выполняют
магнитопровод
шихтованным
60
61.
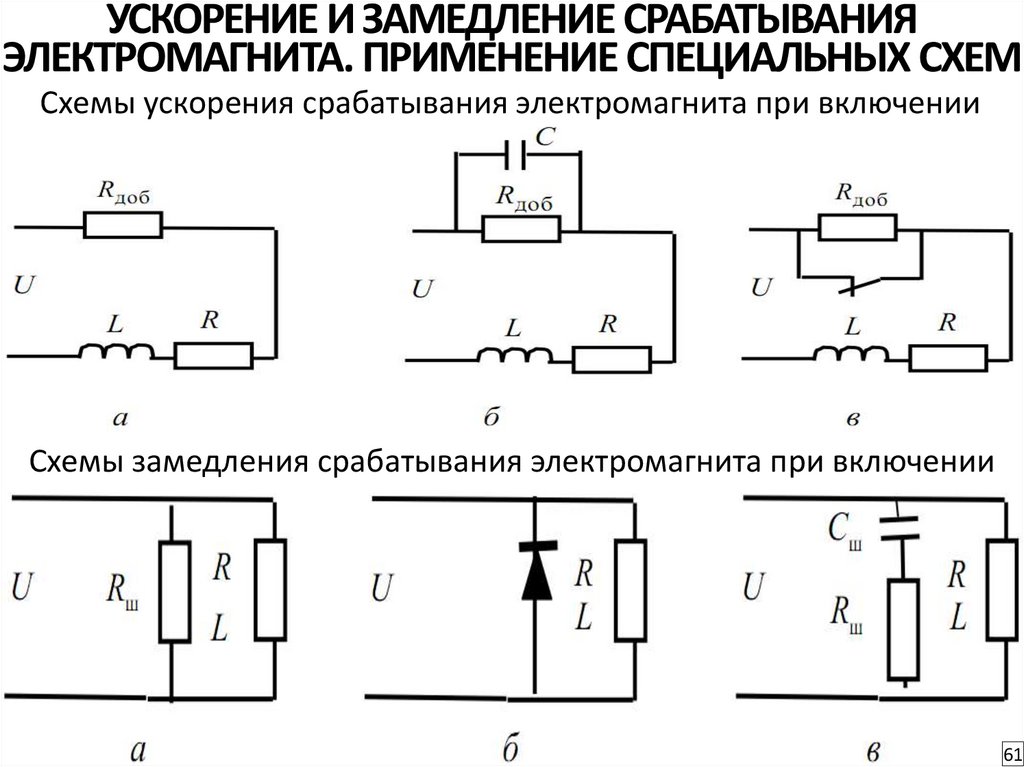
УСКОРЕНИЕ И ЗАМЕДЛЕНИЕ СРАБАТЫВАНИЯЭЛЕКТРОМАГНИТА. ПРИМЕНЕНИЕ СПЕЦИАЛЬНЫХ СХЕМ
Схемы ускорения срабатывания электромагнита при включении
Схемы замедления срабатывания электромагнита при включении
61
62.
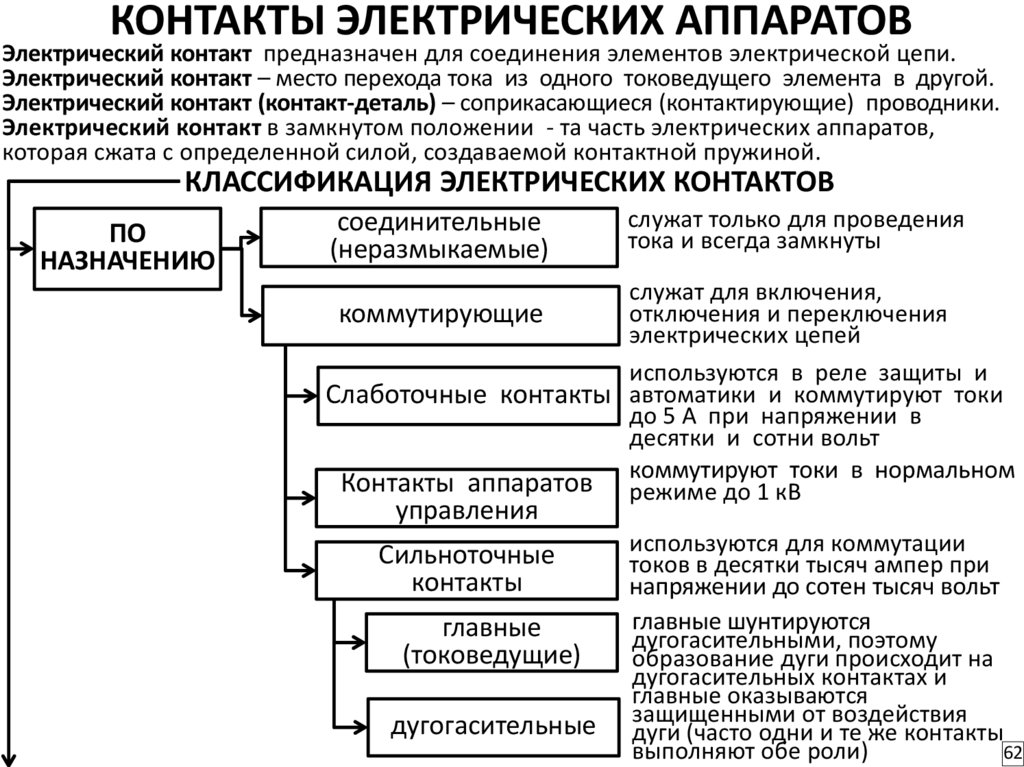
КОНТАКТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВЭлектрический контакт предназначен для соединения элементов электрической цепи.
Электрический контакт – место перехода тока из одного токоведущего элемента в другой.
Электрический контакт (контакт-деталь) – соприкасающиеся (контактирующие) проводники.
Электрический контакт в замкнутом положении - та часть электрических аппаратов,
которая сжата с определенной силой, создаваемой контактной пружиной.
КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ КОНТАКТОВ
ПО
НАЗНАЧЕНИЮ
соединительные
(неразмыкаемые)
служат только для проведения
тока и всегда замкнуты
служат для включения,
отключения и переключения
коммутирующие
электрических цепей
используются в реле защиты и
Слаботочные контакты автоматики и коммутируют токи
до 5 А при напряжении в
десятки и сотни вольт
токи в нормальном
Контакты аппаратов коммутируют
режиме до 1 кВ
управления
Сильноточные
контакты
главные
(токоведущие)
дугогасительные
используются для коммутации
токов в десятки тысяч ампер при
напряжении до сотен тысяч вольт
главные шунтируются
дугогасительными, поэтому
образование дуги происходит на
дугогасительных контактах и
главные оказываются
защищенными от воздействия
дуги (часто одни и те же контакты
выполняют обе роли)
62
63.
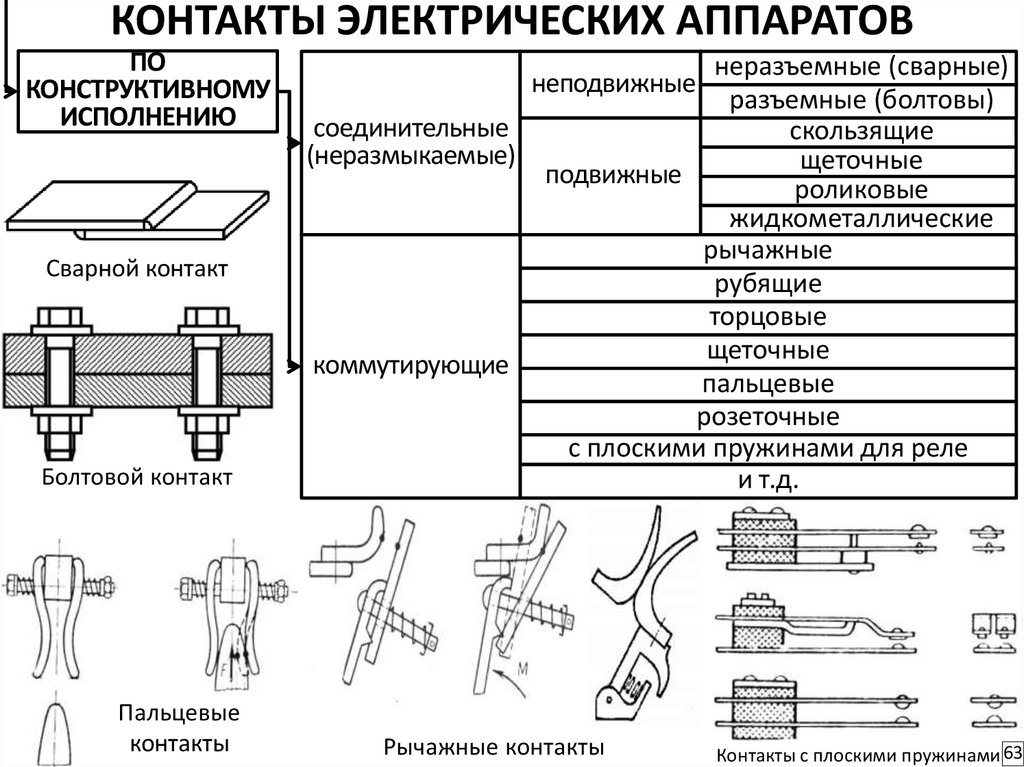
КОНТАКТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВПО
КОНСТРУКТИВНОМУ
ИСПОЛНЕНИЮ
соединительные
(неразмыкаемые)
Сварной контакт
коммутирующие
Болтовой контакт
Пальцевые
контакты
неразъемные (сварные)
разъемные (болтовы)
скользящие
щеточные
подвижные
роликовые
жидкометаллические
рычажные
рубящие
торцовые
щеточные
пальцевые
розеточные
с плоскими пружинами для реле
и т.д.
неподвижные
Рычажные контакты
Контакты с плоскими пружинами 63
64.
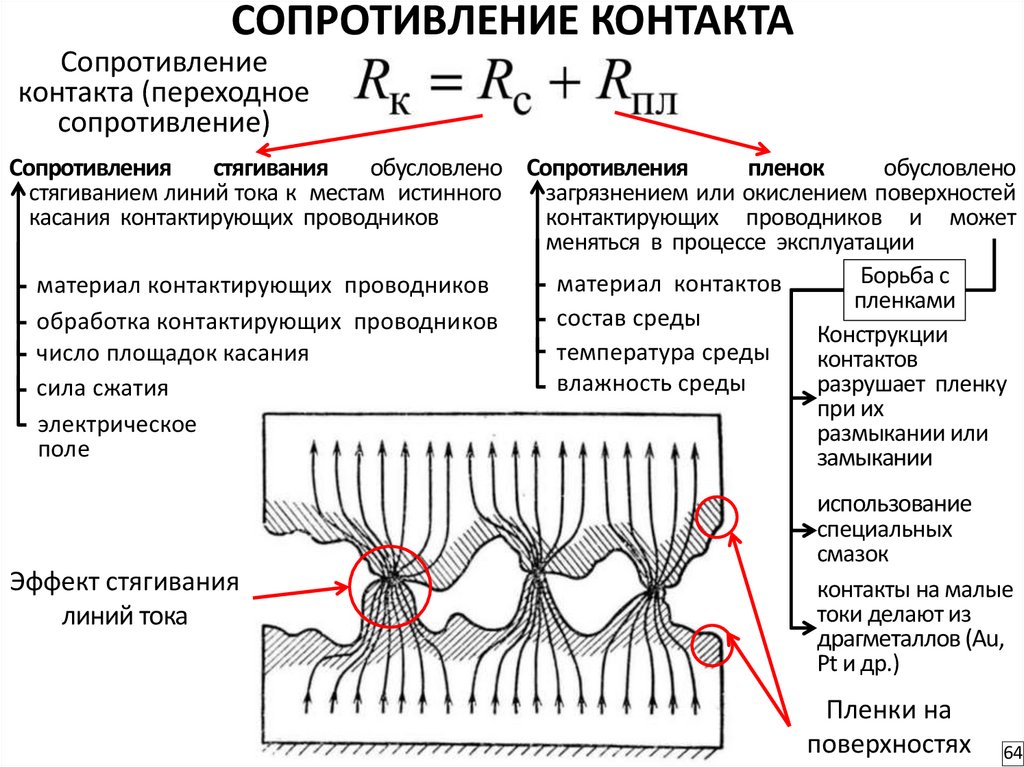
СОПРОТИВЛЕНИЕ КОНТАКТАСопротивление
контакта (переходное
сопротивление)
Сопротивления
стягивания
обусловлено Сопротивления
пленок
обусловлено
стягиванием линий тока к местам истинного
загрязнением или окислением поверхностей
касания контактирующих проводников
контактирующих проводников и может
меняться в процессе эксплуатации
Борьба с
материал контактов
материал контактирующих проводников
пленками
состав среды
обработка контактирующих проводников
Конструкции
температура среды
число площадок касания
контактов
влажность среды
разрушает пленку
сила сжатия
при их
электрическое
размыкании или
поле
замыкании
Эффект стягивания
линий тока
использование
специальных
смазок
контакты на малые
токи делают из
драгметаллов (Au,
Pt и др.)
Пленки на
поверхностях
64
65.
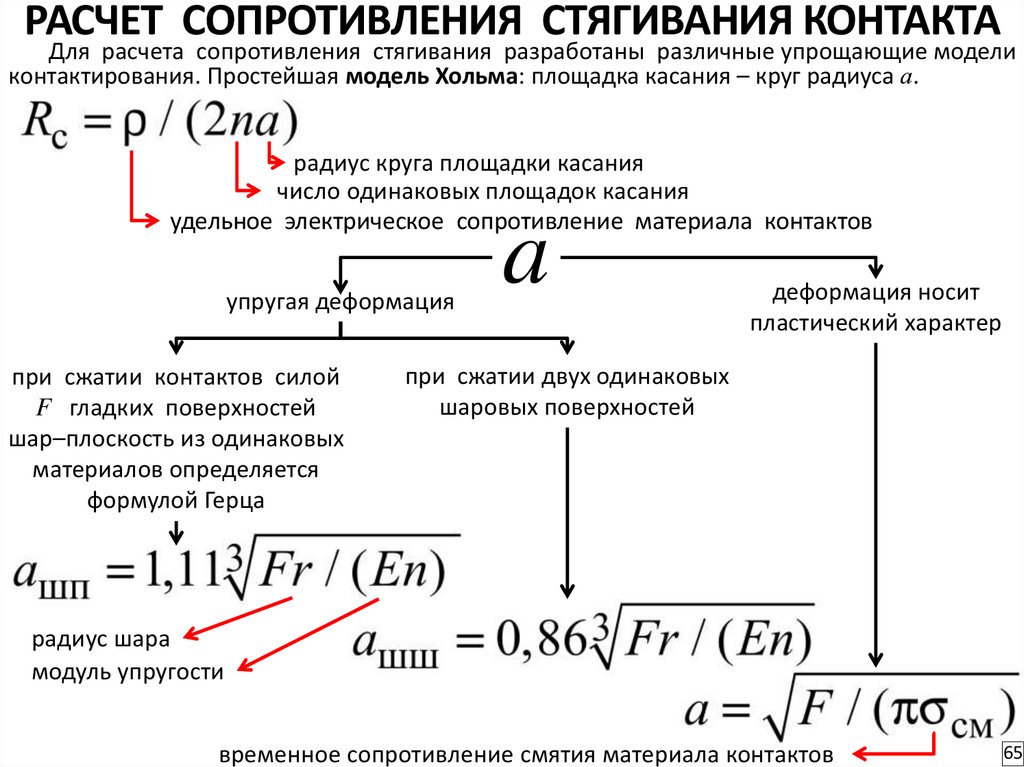
РАСЧЕТ СОПРОТИВЛЕНИЯ СТЯГИВАНИЯ КОНТАКТАДля расчета сопротивления стягивания разработаны различные упрощающие модели
контактирования. Простейшая модель Хольма: площадка касания – круг радиуса а.
радиус круга площадки касания
число одинаковых площадок касания
удельное электрическое сопротивление материала контактов
упругая деформация
при сжатии контактов силой
F гладких поверхностей
шар–плоскость из одинаковых
материалов определяется
формулой Герца
a
деформация носит
пластический характер
при сжатии двух одинаковых
шаровых поверхностей
радиус шара
модуль упругости
временное сопротивление смятия материала контактов
65
66.
ПРАКТИЧЕСКИЙ РАСЧЕТ СОПРОТИВЛЕНИЯ КОНТАКТАДля практических расчетов сопротивления контакта часто используют эмпирическую формулу
Характеристика
переходного
сопротивления
сила сжатия
контакта
2≠1, из-за наличия
остаточных
деформаций
контактирующих
выступов
точечный контакт (n=1) – 0,5;
линейный контакт (n=2) – 0,5-0,8;
плоскостной контакт (n≥3) – 1.
66
67.
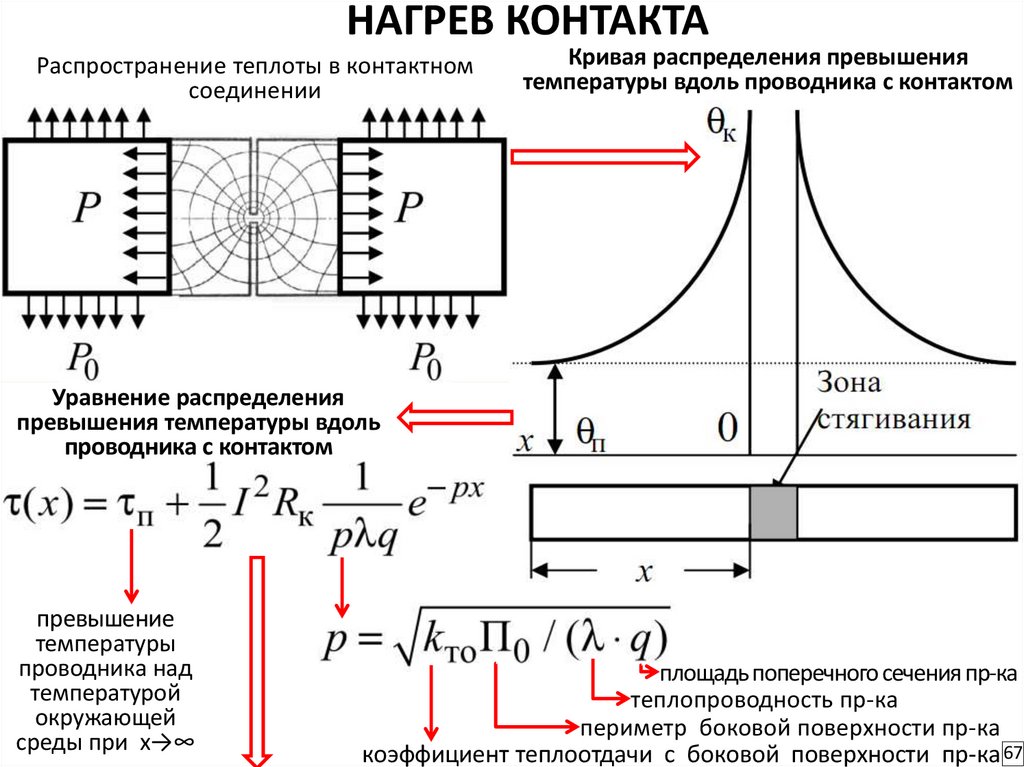
НАГРЕВ КОНТАКТАРаспространение теплоты в контактном
соединении
Кривая распределения превышения
температуры вдоль проводника с контактом
Уравнение распределения
превышения температуры вдоль
проводника с контактом
превышение
температуры
проводника над
температурой
окружающей
среды при x→∞
площадь поперечного сечения пр-ка
теплопроводность пр-ка
периметр боковой поверхности пр-ка
коэффициент теплоотдачи с боковой поверхности пр-ка 67
68.
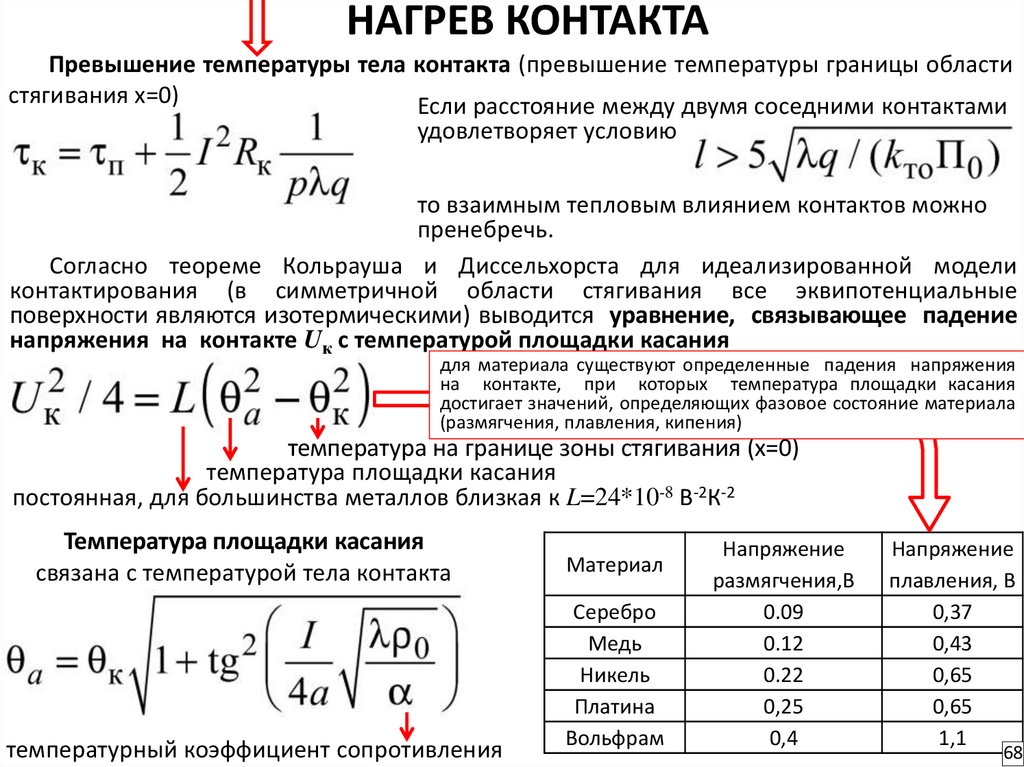
НАГРЕВ КОНТАКТАПревышение температуры тела контакта (превышение температуры границы области
стягивания x=0)
Если расстояние между двумя соседними контактами
удовлетворяет условию
то взаимным тепловым влиянием контактов можно
пренебречь.
Согласно теореме Кольрауша и Диссельхорста для идеализированной модели
контактирования (в симметричной области стягивания все эквипотенциальные
поверхности являются изотермическими) выводится уравнение, связывающее падение
напряжения на контакте Uк с температурой площадки касания
для материала существуют определенные падения напряжения
на контакте, при которых температура площадки касания
достигает значений, определяющих фазовое состояние материала
(размягчения, плавления, кипения)
температура на границе зоны стягивания (x=0)
температура площадки касания
постоянная, для большинства металлов близкая к L=24*10-8 В-2К-2
Температура площадки касания
связана с температурой тела контакта
температурный коэффициент сопротивления
Материал
Серебро
Медь
Никель
Платина
Вольфрам
Напряжение
размягчения,В
0.09
0.12
0.22
0,25
0,4
Напряжение
плавления, В
0,37
0,43
0,65
0,65
1,1
68
69.
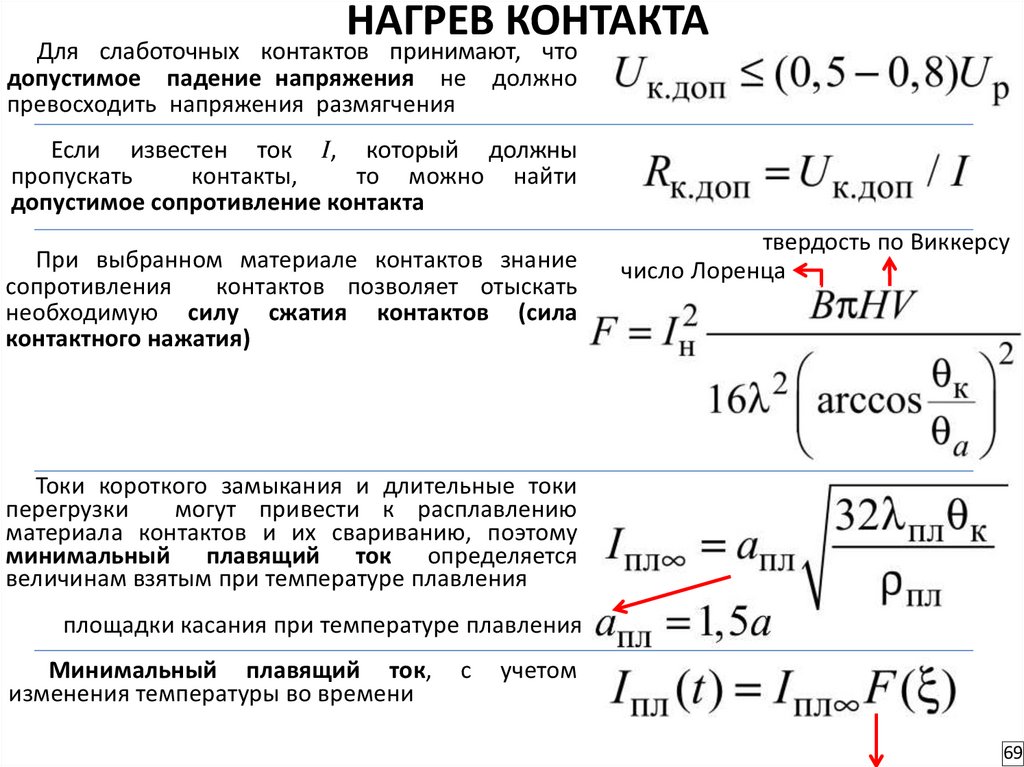
НАГРЕВ КОНТАКТАДля слаботочных контактов принимают, что
допустимое падение напряжения не должно
превосходить напряжения размягчения
Если известен ток I, который должны
пропускать
контакты,
то можно найти
допустимое сопротивление контакта
При выбранном материале контактов знание
сопротивления
контактов позволяет отыскать
необходимую силу сжатия контактов (сила
контактного нажатия)
твердость по Виккерсу
число Лоренца
Токи короткого замыкания и длительные токи
перегрузки
могут привести к расплавлению
материала контактов и их свариванию, поэтому
минимальный плавящий ток определяется
величинам взятым при температуре плавления
площадки касания при температуре плавления
Минимальный плавящий ток,
изменения температуры во времени
с
учетом
69
70.
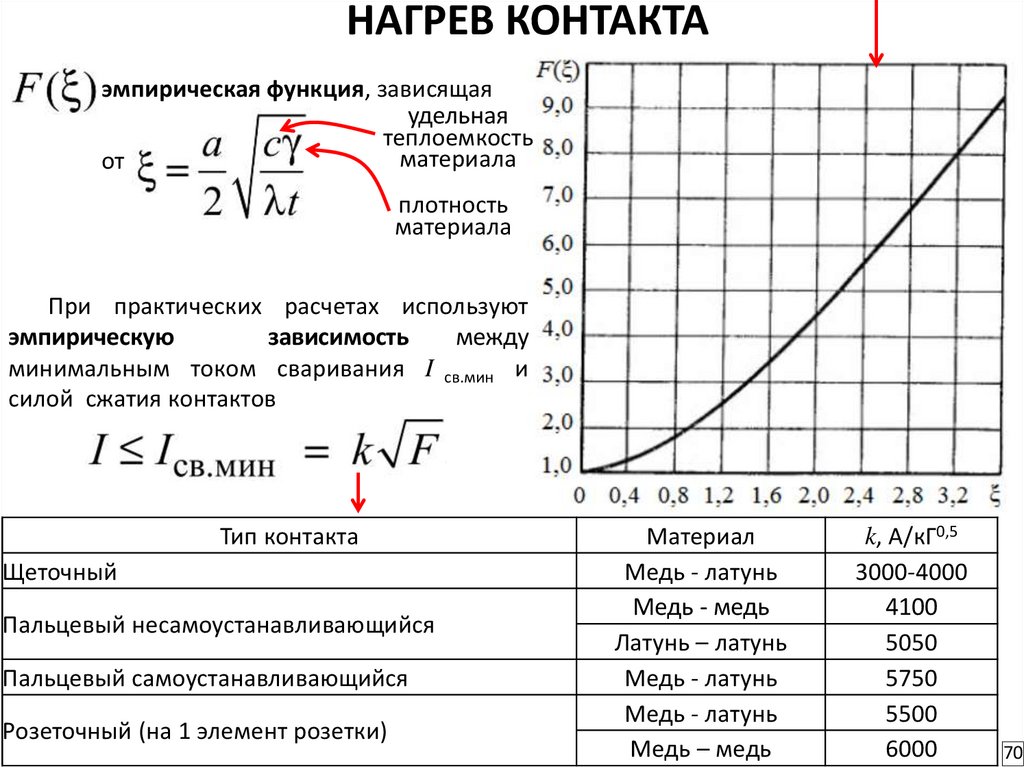
НАГРЕВ КОНТАКТАэмпирическая функция, зависящая
удельная
теплоемкость
материала
от
плотность
материала
При практических расчетах используют
эмпирическую
зависимость
между
минимальным током сваривания I св.мин и
силой сжатия контактов
Тип контакта
Щеточный
Пальцевый несамоустанавливающийся
Пальцевый самоустанавливающийся
Розеточный (на 1 элемент розетки)
Материал
Медь - латунь
Медь - медь
Латунь – латунь
Медь - латунь
Медь - латунь
Медь – медь
k, А/кГ0,5
3000-4000
4100
5050
5750
5500
6000
70
71.
РЕЖИМЫ РАБОТЫ КОНТАКТОВСТАТИЧЕСКИЕ РЕЖИМЫ
Условия работы контактов определяются их возможными состояниями
(контакты замкнуты или разомкнуты).
Замкнутое состояние характеризуется протеканием номинальных и
аварийных токов, а также процессами нагрева контактов.
Разомкнутое состояние характеризуется максимальным напряжением,
которое выдерживает изоляционный межконтактный промежуток без пробоя.
Напряжение пробоя межконтактного промежутка в целях надежности должно
быть выше максимального напряжения при разомкнутых контактах.
Расстояние между ближайшими точками контакт-деталей в разомкнутом
состоянии называется раствором контактов. Раствор контактов выбирается из
условий электрической прочности межконтактного промежутка и гашения
дуги. Установлены соответствующие испытательные напряжения, воздействие
которых должны выдерживать межконтактные промежутки.
71
72.
РЕЖИМЫ РАБОТЫ КОНТАКТОВДИНАМИЧЕСКИЕ РЕЖИМЫ
Работоспособность коммутирующих контактов характеризуется также процессами
замыкания (включения) и размыкания (отключения) цепи.
Включение цепи. При включении электрических аппаратов в их контактах могут
иметь место следующие процессы: вибрации, эрозия на поверхности контактов в
результате образования электрического разряда между ними. При достижении некоторого
расстояния между контактами создаются условия для электрического пробоя, в результате
которого между электродами загорается дуга замыкания. При соприкосновении
контактов дуга гаснет. Если соприкосновение контактов носит ударный характер, то
возможен неоднократный отброс подвижного контакта (вибрация). Не исключено
повторное возникновение дуги или искры, которые ведут к износу контактов.
Отключение цепи. В процессе размыкания сила сжатия контактов уменьшается,
переходное сопротивление увеличивается, за счет чего растет температура площадок
касания. В момент разъединения контакты нагреваются до температуры плавления и
между ними возникает мостик из жидкого металла. При дальнейшем движении
контактов мостик обрывается и, в зависимости от параметров отключаемой цепи,
возникает дуговой или тлеющий разряд. Разрыв жидкометаллического мостика,
проскакивание искры или горение дуги являются причинами износа контактов
(электрической эрозии). Высокая температура приводит к интенсивному окислению и
распылению материала контактов в окружающем пространстве, переносу материала с
одного электрода на другой и образованию пленок. Перенос материала с одного контакта
на другой наиболее вреден при постоянном токе, так как направление переноса в этом
случае постоянно. Эрозия контактов под действием малых токов определяется
мостиковой стадией и стадией искрового разряда. Для уменьшения эрозии применяются
искрогасительные схемы. Для борьбы с эрозией контактов сокращают длительность
горения дуги с помощью дугогасительных устройств, устраняют вибрации контактов при
включении, применяют дугостойкие материалы контактов.
72
73.
МАТЕРИАЛЫ КОНТАКТОВMатериалы контактов должны иметь характеристики:
высокие электрическую проводимость и теплопроводность,
стойкость против образования пленок и коррозии,
малую твердость для уменьшения силы сжатия,
высокую твердость для уменьшения механического износа,
малую эрозию,
высокую дугостойкость,
простоту обработки,
низкую стоимость.
В качестве материалов контактов используют:
чистые металлы (медь, алюминий, серебро, вольфрам и др.),
сплавы (латунь, бронза и др.),
неметаллы (углерод),
композиции взаимно не сплавляемых металлов (вольфрам-серебро,
вольфрам-медь),
композиции металлов с оксидами металлов (серебро – оксид кадмия,
серебро – оксид меди, медь – оксид меди),
композиции металлов с карбидами (вольфрам – карбид вольфрама),
композиции металлов с углеродом (серебро – графит, медь – графит)
многочисленные тройные композиции.
Выбор материала контактов определяется условиями их работы. 73
74.
ЭЛЕКТРИЧЕСКАЯ ДУГА И ДУГОГАШЕНИЕЭлектрическая дуга является одним из видов газового разряда (явление
прохождения тока через газ).
Дуга (дуговой
разряд)
возникает
при
размыкании (замыкании)
электрических цепей с помощью контактов электрических аппаратов
(выключателей, автоматов, контакторов, пускателей, рубильников, реле), если
величины токов и напряжений превосходят некоторые критические значения.
Эти значения зависят от материала контактов, параметров цепи, свойств
среды и т.д. Дуговой разряд имеет место при относительно больших токах (для
металлов – примерно 0,5 А) и при напряжении в цепи не менее 15 В. При
меньших значениях тока и напряжения размыкание контактов сопровождается
образованием искр.
Дуговой разряд в газовой среде относительно высокой плотности
характеризуется ясно очерченной границей между столбом дуги и
окружающей средой, высокой плотностью тока в столбе дуги (десятки-сотни
ампер на миллиметр), высокой температурой газа внутри столба дуги (5000–
25000 К), высокой плотностью тока на катоде и малым напряжением у катода
(10–20 В).
Дуга приводит к значительному износу аппарата, но, с другой стороны, играет
положительную роль. При отключении постоянного тока значительная часть
электромагнитной энергии, запасенной в цепи, преобразуется в тепловую
энергию дуги, которая отводится в окружающую среду. Это ведет к снижению
перенапряжений, опасных для изоляции оборудования. При переменном токе
процесс
гашения
дуги
проходит вблизи нулевой паузы тока, когда
электромагнитная энергия цепи близка к нулю. В результате этого вероятность
появления опасных перенапряжений резко уменьшается.
74
75.
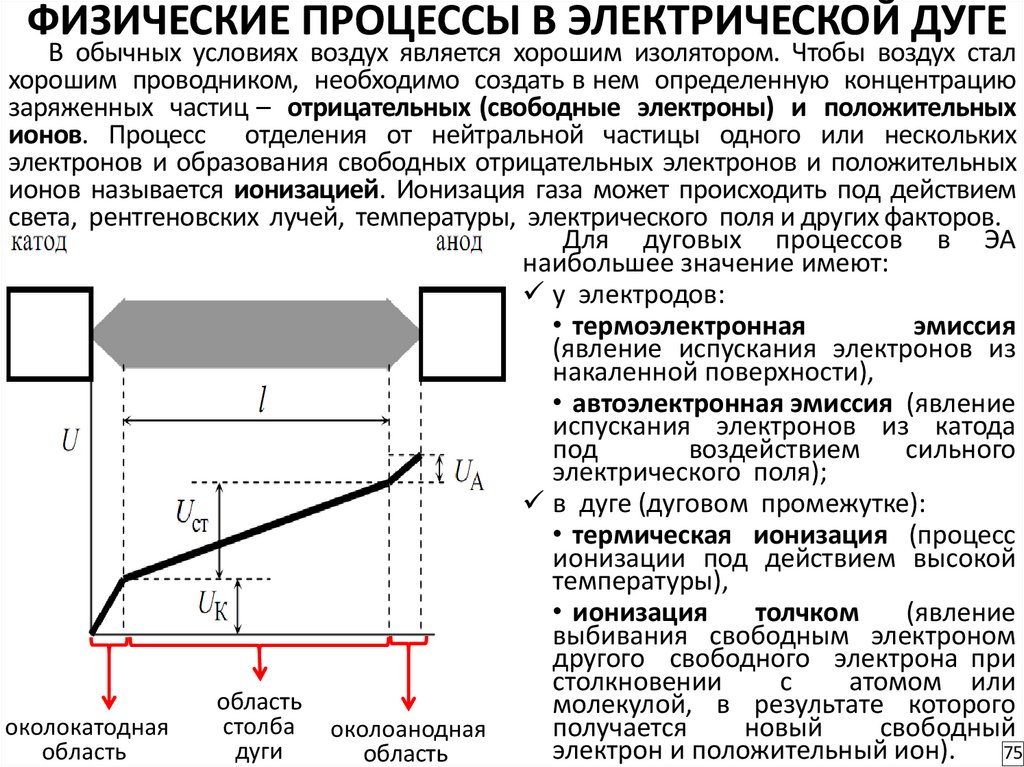
ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКОЙ ДУГЕВ обычных условиях воздух является хорошим изолятором. Чтобы воздух стал
хорошим проводником, необходимо создать в нем определенную концентрацию
заряженных частиц – отрицательных (свободные электроны) и положительных
ионов. Процесс отделения от нейтральной частицы одного или нескольких
электронов и образования свободных отрицательных электронов и положительных
ионов называется ионизацией. Ионизация газа может происходить под действием
света, рентгеновских лучей, температуры, электрического поля и других факторов.
Для дуговых процессов в ЭА
наибольшее значение имеют:
у электродов:
• термоэлектронная
эмиссия
(явление испускания электронов из
накаленной поверхности),
• автоэлектронная эмиссия (явление
испускания электронов из катода
под
воздействием
сильного
электрического поля);
в дуге (дуговом промежутке):
• термическая ионизация (процесс
ионизации под действием высокой
температуры),
• ионизация
толчком
(явление
выбивания свободным электроном
другого свободного электрона при
столкновении
с
атомом или
область
молекулой, в результате которого
столба околоанодная
околокатодная
получается
новый
свободный
75
электрон и положительный ион).
дуги
область
область
76.
ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКОЙ ДУГЕКатодная область имеет основное значение в процессе формирования дуги.
Средняя напряженность электрического поля у катода составляет 105 В/см и
выше. При таких напряженностях выход электронов с поверхности катода
может осуществляться за счет автоэлектронной эмиссии. Если температура
кипения материала катода превышает 2500 К, эмиссия электронов с
поверхности катода может происходить и за счет термических процессов
(термоэлектронная эмиссия). Возможно совместное существование термической
и автоэлектронной эмиссии при нагретом катоде.
Анодное падение напряжения не является необходимым условием
существования дуги. Анод принимает идущий к нему из зоны плазмы дуги
электронный поток. Повышение напряженности электрического поля у анода
объясняется образованием у анода пространственного отрицательного заряда изза недостатка ионов. Величина анодного напряжения зависит от температуры
анода, рода металла и пр. Часто температура анода бывает выше температуры
катода.
Область столба дуги занимает большую часть пространства между катодом и
анодом. Столб дуги – это квазинейтральная высокоионизированная среда. Он
является газовым проводником, соединяющим приэлектродные области.
Основным источником ионов и электронов в столбе дуги является термическая
ионизация. С ростом давления степень ионизации уменьшается. В связи с
этим во многих дугогасящих устройствах (ДГУ) электрических аппаратов
создается повышенное давление газа, которое способствует гашению дуги. Так
как степень ионизации определяется температурой, во всех ДГУ стремятся
отводить тепло от дуги либо за счет охлаждения движущимся воздухом или газом
(воздушные, масляные выключатели), либо за счет отдачи тепла стенкам
76
дугогасительной камеры.
77.
ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКОЙ ДУГЕВ столбе дуги протекают также процессы деионизации (образование
нейтральных частиц, т.е. воссоединение заряженных частиц) за счет
рекомбинации (процесс образования нейтральных частиц при взаимном
соприкосновении заряженных частиц) и диффузии (процесс выноса
заряженных частиц из дугового промежутка в окружающее пространство,
обусловленный электромагнитными и тепловыми факторами).
При возникновении дуги преобладают процессы ионизации, а в устойчиво
горящей дуге процессы ионизации и деионизации одинаково интенсивны.
При преобладании процессов деионизации дуга гаснет.
Падение напряжения в дуговом столбе Uст= El (здесь E - напряженность
электрического поля; l – длина столба).
В некоторых аппаратах низкого напряжения длина дуги невелика. Падение
напряжения на столбе дуги малó по сравнению с суммой падения напряжения у
анода и катода (UA +UK ). Такие дуги называются короткими.
В аппаратах высокого напряжения падение напряжения на столбе дуги
значительно больше околоэлектродных. Условия существования таких дуг,
называемых длинными, определяются процессами в столбе дуги. Для
длинных дуг Uд ≈Uст= El.
Напряженность электрического поля в столбе дуги обычно одинакова по
длине. Величина напряженности зависит от условий, в которых горит дуга, и от
свойств дугогасящей среды и составляет 10–200 В/см. Меньшие значения
относятся к открытым дугам в воздухе при относительно больших токах,
большие – к дугам, находящимся в потоке газов или паров жидкости при
77
интенсивном отборе тепла от столба дуги.
78.
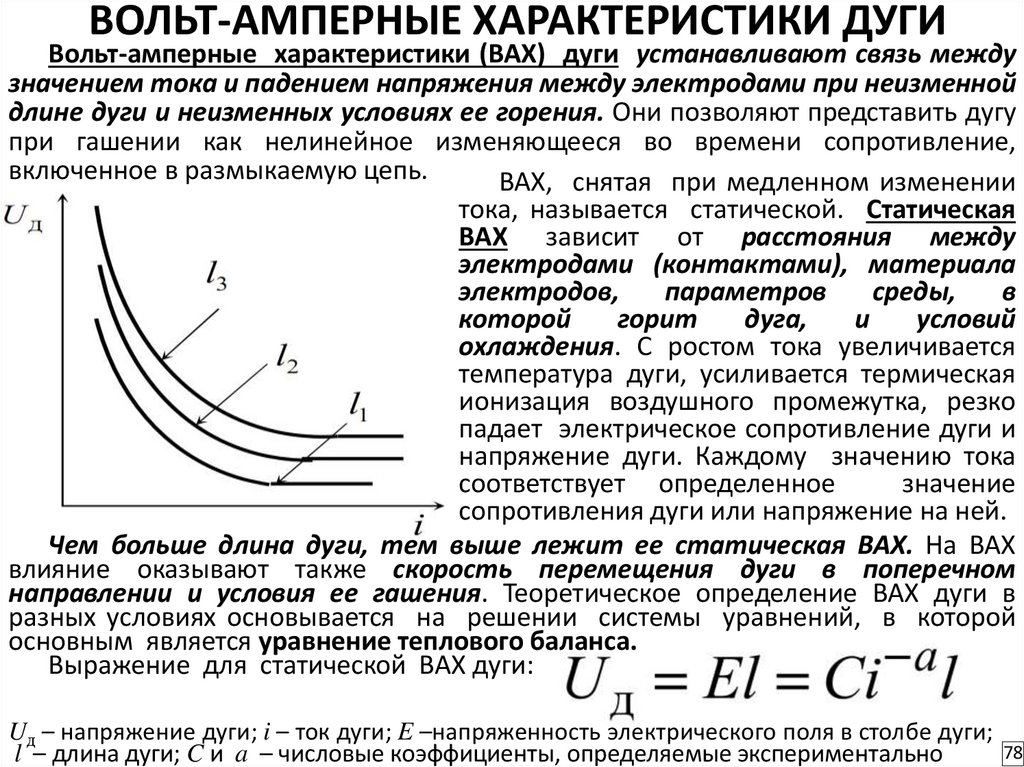
ВОЛЬТ-АМПЕРНЫЕ ХАРАКТЕРИСТИКИ ДУГИВольт-амперные характеристики (ВАХ) дуги устанавливают связь между
значением тока и падением напряжения между электродами при неизменной
длине дуги и неизменных условиях ее горения. Они позволяют представить дугу
при гашении как нелинейное изменяющееся во времени сопротивление,
включенное в размыкаемую цепь.
ВАХ, снятая при медленном изменении
тока, называется статической. Статическая
ВАХ зависит от расстояния между
электродами (контактами), материала
электродов,
параметров
среды,
в
которой
горит
дуга,
и
условий
охлаждения. С ростом тока увеличивается
температура дуги, усиливается термическая
ионизация воздушного промежутка, резко
падает электрическое сопротивление дуги и
напряжение дуги. Каждому значению тока
соответствует определенное
значение
сопротивления дуги или напряжение на ней.
Чем больше длина дуги, тем выше лежит ее статическая ВАХ. На ВАХ
влияние оказывают также скорость перемещения дуги в поперечном
направлении и условия ее гашения. Теоретическое определение ВАХ дуги в
разных условиях основывается на решении системы уравнений, в которой
основным является уравнение теплового баланса.
Выражение для статической ВАХ дуги:
Uд – напряжение дуги; i – ток дуги; E –напряженность электрического поля в столбе дуги;
l – длина дуги; C и a – числовые коэффициенты, определяемые экспериментально
78
79.
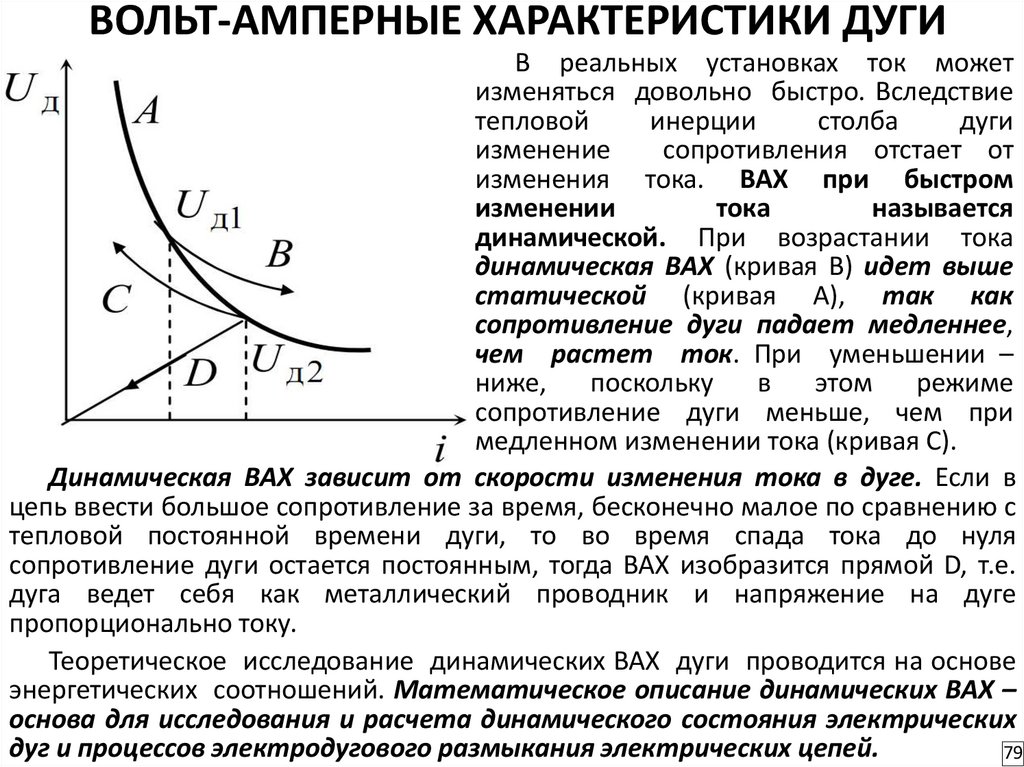
ВОЛЬТ-АМПЕРНЫЕ ХАРАКТЕРИСТИКИ ДУГИВ реальных установках ток может
изменяться довольно быстро. Вследствие
тепловой
инерции
столба
дуги
изменение
сопротивления отстает от
изменения тока. ВАХ при быстром
изменении
тока
называется
динамической. При возрастании тока
динамическая ВАХ (кривая В) идет выше
статической (кривая А), так как
сопротивление дуги падает медленнее,
чем растет ток. При уменьшении –
ниже,
поскольку
в
этом
режиме
сопротивление дуги меньше, чем при
медленном изменении тока (кривая С).
Динамическая ВАХ зависит от скорости изменения тока в дуге. Если в
цепь ввести большое сопротивление за время, бесконечно малое по сравнению с
тепловой постоянной времени дуги, то во время спада тока до нуля
сопротивление дуги остается постоянным, тогда ВАХ изобразится прямой D, т.е.
дуга ведет себя как металлический проводник и напряжение на дуге
пропорционально току.
Теоретическое исследование динамических ВАХ дуги проводится на основе
энергетических соотношений. Математическое описание динамических ВАХ –
основа для исследования и расчета динамического состояния электрических
дуг и процессов электродугового размыкания электрических цепей.
79
80.
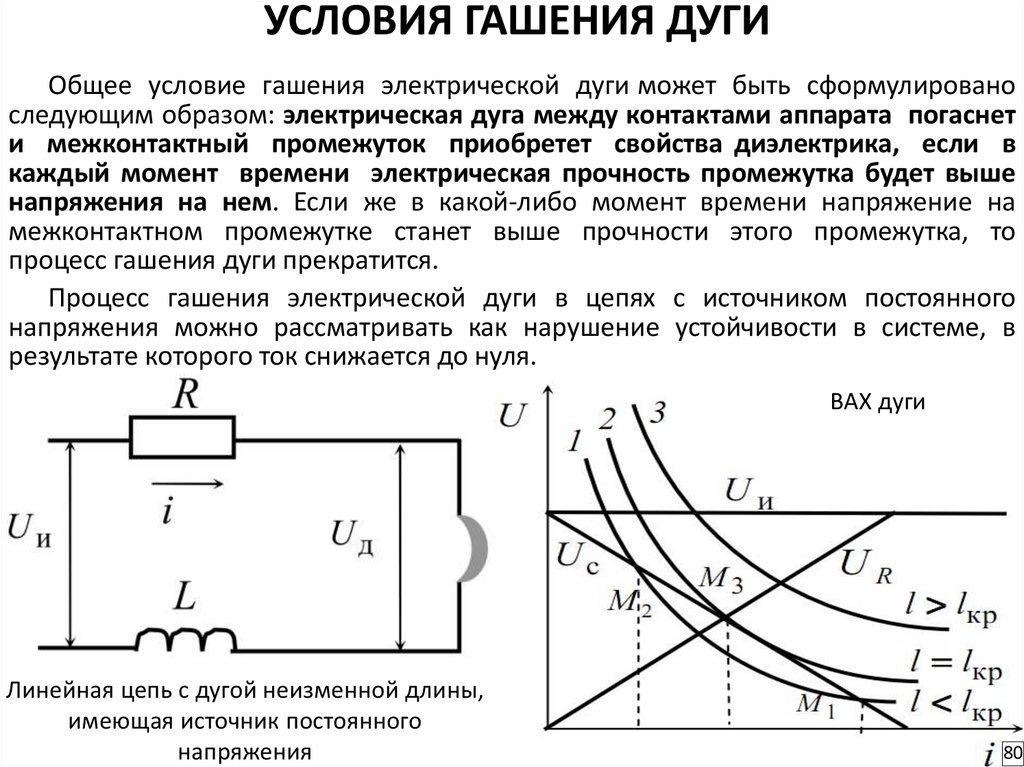
УСЛОВИЯ ГАШЕНИЯ ДУГИОбщее условие гашения электрической дуги может быть сформулировано
следующим образом: электрическая дуга между контактами аппарата погаснет
и межконтактный промежуток приобретет свойства диэлектрика, если в
каждый момент времени электрическая прочность промежутка будет выше
напряжения на нем. Если же в какой-либо момент времени напряжение на
межконтактном промежутке станет выше прочности этого промежутка, то
процесс гашения дуги прекратится.
Процесс гашения электрической дуги в цепях с источником постоянного
напряжения можно рассматривать как нарушение устойчивости в системе, в
результате которого ток снижается до нуля.
ВАХ дуги
Линейная цепь с дугой неизменной длины,
имеющая источник постоянного
напряжения
80
81.
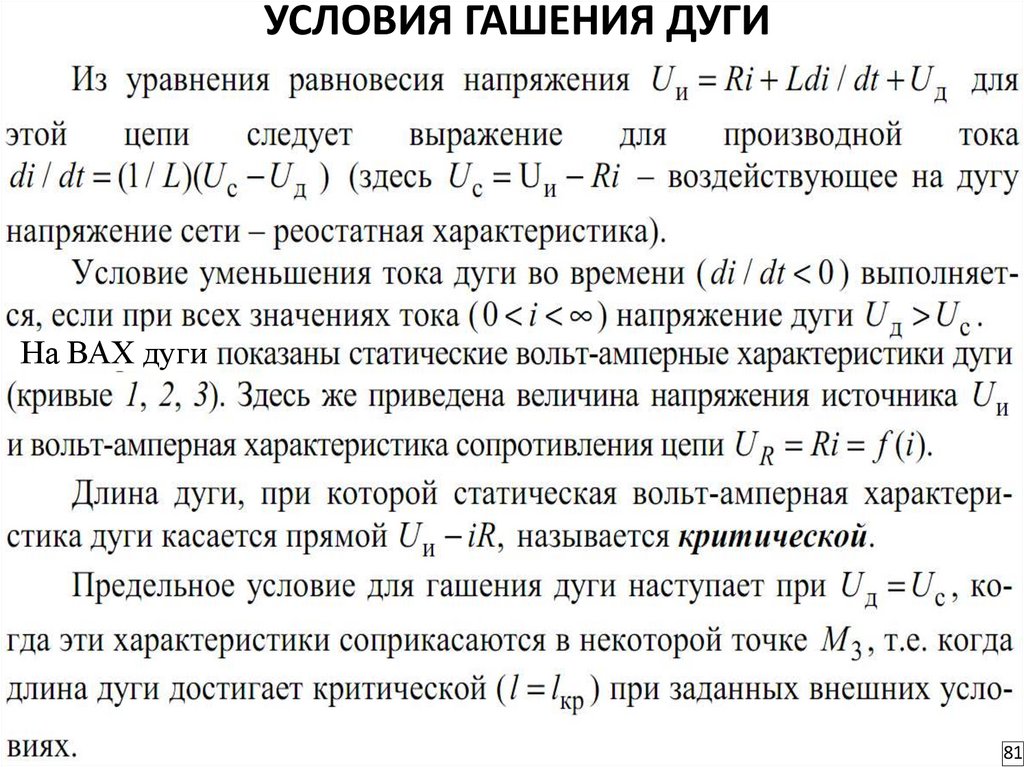
УСЛОВИЯ ГАШЕНИЯ ДУГИНа ВАХ дуги
81
82.
УСЛОВИЯ ГАШЕНИЯ ДУГИ82
83.
УСЛОВИЯ ГАШЕНИЯ ДУГИВАХ
83
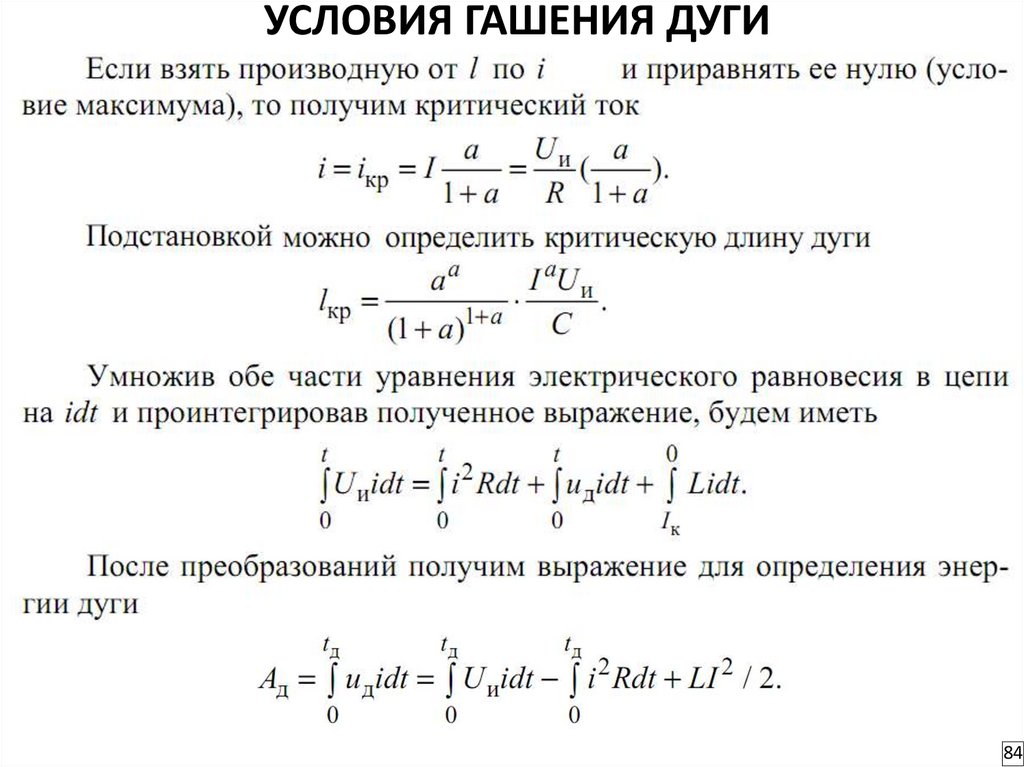
84.
УСЛОВИЯ ГАШЕНИЯ ДУГИ84
85.
УСЛОВИЯ ГАШЕНИЯ ДУГИ85
86.
УСЛОВИЯ ГАШЕНИЯ ДУГИ86
87.
УСЛОВИЯ ГАШЕНИЯ ДУГИ87
88.
УСЛОВИЯ ГАШЕНИЯ ДУГИ88
89.
СПОСОБЫ ГАШЕНИЯ ДУГИ.ДУГОГАСИТЕЛЬНЫЕ УСТРОЙСТВА
89
90.
СПОСОБЫ ГАШЕНИЯ ДУГИ. ДУГОГАСИТЕЛЬНЫЕУСТРОЙСТВА НИЗКОГО НАПРЯЖЕНИЯ
Простейший способ гашения дуги – механическое растяжение столба дуги.
При небольших токах (примерно до 10 А) дуга 1 (рис. а) растягивается между
контактами на длину l и не выходит из межконтактного промежутка. При
значительных токах столб дуги 2 (рис. а) выдувается вверх под действием сил,
вызываемых тепловыми потоками, или сил электродинамического взаимодействия
тока дуги Д на участке бв с токами в токоведущих элементах аб и вг. В таких
устройствах гасится свободная (открытая) дуга.
Широко применяются дугогасительные решетки (рис. б), набранные из стальных
пластин П, на которые выдувается электрическая дуга. Пластины, разбившие столб
дуги на ряд коротких дуг 1-6, являются своеобразными радиаторами, интенсивно их
охлаждающими.
Весьма часто в ДГУ постоянного тока применяют магнитное дутье (рис. в), т.е.
создают в зоне горения дуги поперечное магнитное поле, которое увеличивает
скорость перемещения (и растяжения) дуги и способствует вхождению столба дуги в
узкие щели между изоляционными стенками (рис. г). Магнитное поле может быть
создано обмотками, обтекаемыми отключаемым током (последовательное
магнитное дутье), параллельными обмотками или постоянными магнитами.
90
91.
СПОСОБЫ ГАШЕНИЯ ДУГИ. ДУГОГАСИТЕЛЬНЫЕУСТРОЙСТВА ВЫСОКОГО НАПРЯЖЕНИЯ
При гашении дуги в трансформаторном масле (рис. а) дуга (Д) разлагает масло (М)
и
образуется газопаровой пузырь (ГП), обладающий высокой теплопроводностью. Возникающее
бурное перемешивание смеси из масла, его паров и газов обусловливает гашение дуги.
Поток сжатого воздуха (рис. б), воздействующий на дугу, интенсивно ее охлаждает
и растягивает столб, особенно если на пути находятся изолирующие перегородки.
Для гашения дуги можно использовать эффект выделения газов (рис. в) из
некоторых материалов. Дуга, соприкасаясь с фибровой трубкой (ФТ), дает поток
газов, который охлаждает и гасит дугу.
В герметизированных ДГУ (рис. г) дугогасящей средой является элегаз или вакуум.
Хорошие дугогасящие свойства элегаза определяются его высокой теплоотводящей
способностью и спецификой химических реакций в условиях гашения дуги. Резкое
снижение концентрации газовых частиц в вакууме снижает возможность возникновения
носителей тока (электронов и ионов). В результате пробивные напряжения промежутков в
вакууме повышаются в 4-5 раз в сравнении с воздухом при атмосферном давлении. При
прохождении переменного тока через нуль возможность для переноса тока исчезает и
дуга гасится. Способ гашения электрической дуги, связанный с интенсивным охлаждением
столба дуги в потоках сжатого газа, широко применяется в ДГУ воздушного или элегазового
дутья выключателей переменного тока высокого и сверхвысокого напряжения.
Полное исключение дуги достигается в бесконтактных аппаратах, широкое
распространение среди которых нашли полупроводниковые аппараты.
91
92.
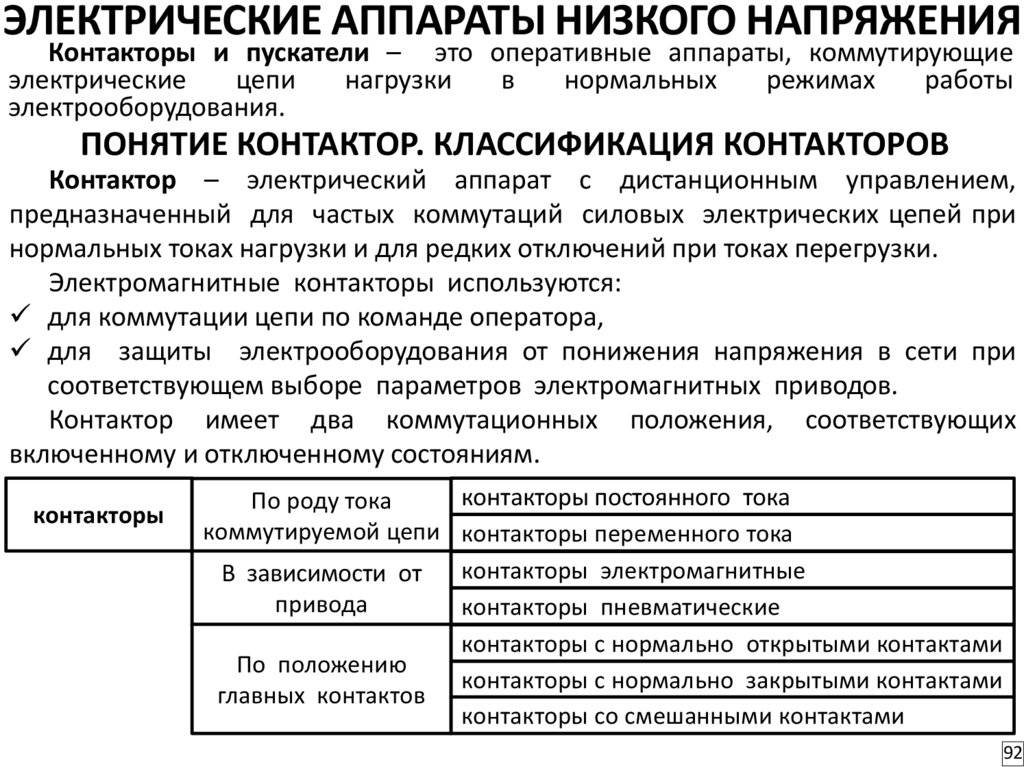
ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ НИЗКОГО НАПРЯЖЕНИЯКонтакторы и пускатели – это оперативные аппараты, коммутирующие
электрические
цепи
нагрузки
в
нормальных
режимах
работы
электрооборудования.
ПОНЯТИЕ КОНТАКТОР. КЛАССИФИКАЦИЯ КОНТАКТОРОВ
Контактор – электрический аппарат с дистанционным управлением,
предназначенный для частых коммутаций силовых электрических цепей при
нормальных токах нагрузки и для редких отключений при токах перегрузки.
Электромагнитные контакторы используются:
для коммутации цепи по команде оператора,
для защиты электрооборудования от понижения напряжения в сети при
соответствующем выборе параметров электромагнитных приводов.
Контактор имеет два коммутационных положения, соответствующих
включенному и отключенному состояниям.
контакторы
контакторы постоянного тока
По роду тока
коммутируемой цепи контакторы переменного тока
контакторы электромагнитные
В зависимости от
привода
контакторы пневматические
контакторы с нормально открытыми контактами
По положению
контакторы с нормально закрытыми контактами
главных контактов
контакторы со смешанными контактами
92
93.
ОБЩИЕ СВЕДЕНИЯ О КОНТАКТОРАХ.Основные технические данные контакторов
Номинальный ток
главных
контактов Iн
составляет 3–4000 А,
коммутируемый ток достигает (6-10)Iн (например, пусковые токи асинхронных
двигателей с короткозамкнутым ротором). Для режима пуска двигателей с
фазным ротором и торможения противовключением характерны 2,5–4-кратные
токи перегрузки.
Номинальные напряжения коммутируемых цепей – 220, 440, 750 В при
постоянном токе; 380, 660 В – при переменном токе.
Механическая износостойкость контактора определяется числом циклов
включение-отключение без замены его узлов и деталей (ток цепи при этом равен
нулю) и составляет (10–20)106 операций. Согласно стандарту различают 5 классов
механической износостойкости.
Коммутационная износостойкость определяется таким числом включений и
отключений цепи с током, после которого требуется замена
контактов.
Современные контакторы должны иметь коммутационную износостойкость
порядка (2–3)106
Собственное время срабатывания (время от момента подачи питания на
катушку до момента касания контактов) при включении состоит из времени
нарастания потока до значения потока трогания и времени движения якоря. У
контакторов постоянного тока большая часть времени тратится на нарастание
потока (0,15–0,25 с). Для контакторов переменного тока время срабатывания
составляет 0,03–0,05 с (переходный процесс при включении протекает в течение
1/4 периода).
Собственное время отключения (отпускания) – время от момента снятия
напряжения с катушки до момента размыкания контактов. Для контакторов
постоянного тока время отпускания составляет 0,07–0,2 с, для контакторов
93
переменного тока – 0,02 с.
94.
ОБЩИЕ СВЕДЕНИЯ О КОНТАКТОРАХ.Требования, предъявляемые к контакторам,
и условия их работы определены стандартами
Контакторы должны обладать высокой механической и коммутационной
износостойкостью, технологичностью конструкции, высокой надежностью; обеспечивать
длительный срок службы при большой частоте включений (до 3600 включений в час).
Категории применения контакторов обусловлены различными
режимами отключения электрических цепей контакторами
Стандартами регламентированы категории применения контакторов
переменного тока:
AC–1 – активная или малоиндуктивная нагрузка;
AC–2 – пуск электродвигателей с фазным ротором, торможение
противовключением;
AC–3 – пуск электродвигателей с короткозамкнутым ротором. Отключение
вращающихся двигателей при номинальной нагрузке;
AC–4 – пуск электродвигателей с короткозамкнутым ротором. Отключение
неподвижных
или медленно
вращающихся
двигателей. Торможение
противовключением.
Для контакторов постоянного тока существуют следующие категории применения:
DC–1 – активная или малоиндуктивная нагрузка;
DC–2 – пуск электродвигателей постоянного тока с параллельным
возбуждением и их отключение при номинальной частоте вращения;
DC–3 – пуск электродвигателей постоянного тока с параллельным возбуждением
и их отключение при неподвижном или медленно вращающемся роторе;
DC–4 – пуск электродвигателей постоянного тока с последовательным
возбуждением и их отключение при номинальной частоте вращения;
DC–5 – пуск электродвигателей постоянного тока с последовательным
возбуждением, отключение неподвижных или медленно вращающихся
94
двигателей, торможение противовключением.
95.
Условия отключения цепи контакторами во многом определяются отношениеминдуктивности L нагрузки к ее активному сопротивлению R; чем выше это
отношение, тем труднее условия отключения. Легкие условия наблюдаются при
отключении электрических печей и сопротивлений, а наиболее тяжелые – при
отключении заторможенных двигателей. Так,
категории
применения АС1
соответствует режим отключения цепи со слабоиндуктивной нагрузкой, когда угол
сдвига фаз между током и напряжением цепи близок к нулю. В этих условиях
мгновенное значение возрастающего напряжения промышленной частоты (т.е.
напряжение источника при переходе через нуль) невелико и скорость восстановления
напряжения за переходом тока через нуль мала, процесс отключения цепи
переменного тока оказывается для контактора очень легким.
При отключении вращающихся двигателей условия отключения определяются
степенью скольжения ротора относительно поля статора. Поле статора в асинхронном
двигателе создает основной магнитный поток. При отключении статорной обмотки
поток должен исчезнуть, но это вызывает в роторе ток, стремящийся поддержать
поток. Поток, создаваемый током ротора, неподвижен по отношению к ротору, но
вращается вместе с ротором относительно статора и наводит в нем ЭДС,
противоположную по направлению напряжению сети. Чем быстрее вращается ротор
(чем меньше скольжение), тем ниже падение напряжения на контактах контактора.
ЭДС затухает во времени, так как вращающийся по инерции ротор теряет запас
кинетической энергии и ток ротора уменьшается ввиду прекращения поступления
энергии из сети. В момент перехода тока через ноль в цепи статора скорость
восстановления напряжения, прямо пропорциональная разности напряжения сети
и ЭДС, небольшая и условия гашения дуги будут легкими.
Условия отключения цепи наиболее тяжелые при отключении пусковых токов при
неподвижном роторе (в этом случае практически отсутствует противоЭДС, скорость
восстановления напряжения большая и гашение дуги затруднено).
Характеристики контакторов для разных категорий применения приведены в
справочниках.
95
96.
УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ КОНТАКТОРАКонтактор имеет следующие основные узлы: контактную систему,
дугогасительное устройство, привод, систему вспомогательных слаботочных контактов
(блок-контактов), предназначенных для согласования работы контактора с другими
устройствами. В течение срока службы изношенные контакты могут несколько раз
заменяться новыми. Главные контакты контактора включены в силовую цепь двигателя
Д, обмотка контактора – в цепь управления, содержащую кнопки «Пуск» и «Стоп».
При
отключении
силовой
цепи
напряжение с обмотки 16, расположенной на
сердечнике 15, снимается и подвижная
система под действием возвратной пружины
11 приходит в нормальное состояние.
Возникающая при расхождении главных
контактов дуга Д гасится в дугогасительной
камере
5,
имеющей
изоляционные
перегородки 4, которые
способствуют
растяжению дуги, увеличению ее длины и
сопротивления.
На
выходе
камеры
установлены металлические пластины 3
пламягасительной решетки. Эти пластины
рассеивают
остаточный столб дуги.
Пламягасительная
решетка препятствует
выходу ионизированных газов за пределы
камеры. Быстрый выход дуги с контактов в
камеру обеспечивается системой магнитного
дутья.
96
97.
Обмотка этой системы 17 включена последовательно в цепь главного тока иразмещена на стальном сердечнике 1. Две стальные пластины – полюса 18,
расположенные по бокам сердечника 1, подводят создаваемое обмоткой 17
магнитное поле к зоне горения дуги в камере. Дугогасительная камера 5
изготовляется из дугостойкого изоляционного материала (например, керамики).
Включение контактора произойдет, если подать напряжение на зажимы
13 обмотки 16 приводного электромагнита. Это обеспечивается нажатием
кнопки «Пуск». Якорь 10 электромагнита притянется к сердечнику, преодолев
силы противодействия возвратной 11 и контактной 8 пружин. При включении
контактора кнопка «Пуск» окажется зашунтированной блок-контактами 12
контактора. При ее отпускании цепь обмотки 16 не будет разорвана, а контактор
останется во включенном состоянии.
Установкой полюсного наконечника 14 на сердечник электромагнита
достигается увеличение электромагнитной силы и видоизменение тяговой
характеристики. Немагнитная прокладка (например, латунная) 9 на якоре 10
предназначена для уменьшения силы, обусловленной остаточной индукцией, и
предохранения якоря от залипания при снятом напряжении с обмотки.
Соприкосновение контактов 7 и 2 происходит раньше, чем якорь
электромагнита полностью притянется к полюсу. По мере движения якоря
подвижный контакт «проваливается», упираясь своей верхней частью в
неподвижный контакт 2. Он повернется на некоторый угол и вызовет
дополнительное нажатие контактной пружины 8. Возникает так называемый
провал контактов – смещение подвижного контакта на уровне точки его
касания с неподвижным в случае, если неподвижный контакт будет удален.
Провал контактов обеспечивает надежное замыкание цепи, когда толщина
контактов уменьшается вследствие выгорания их материала под действием
электрической дуги. Величина провала определяет запас материала контактов на
износ в процессе работы контактора. Величина провала составляет 1–10 мм для
97
пальцевых (рычажных) контактов.
98.
После соприкосновения контактов происходит перекатывание подвижногоконтакта 7 по неподвижному 2. Контактная пружина создает определенное
нажатие в контактах, поэтому при перекатывании происходит разрушение
окисных пленок и других химических соединений.
При перекатывании точки касания контактов переходят на новые места
контактной поверхности, не подвергавшиеся воздействию дуги и являющиеся
поэтому чистыми. Все это уменьшает переходное сопротивление контактов и
улучшает условия их работы, однако повышает механический износ контактов.
Благодаря предварительному натяжению контактной пружины 8 в момент
соприкосновения подвижный контакт оказывает давление на неподвижный.
Вследствие этого переходное сопротивление контактов в момент их касания
будет небольшим и контактная площадка не разогреется при включении до
значительной температуры. Предварительное натяжение контактной пружины 8
позволяет
снизить
вибрацию
подвижного контакта при ударе его о
неподвижный. Это предохраняет контакты от приваривания при включении
электрической цепи.
Контактные накладки 6, выполненные из специального материала
(например, серебра), предназначены для улучшения условий длительного
прохождения тока через замкнутые контакты во включенном состоянии. В других
случаях применяются контактные накладки из дугостойкого
материала
(например, металлокерамики) для уменьшения износа контактов под
воздействием электрической дуги при частых отключениях цепи.
Совершенствование конструкций контакторов и магнитных пускателей имеет
своей целью повышение износоустойчивости, достижение простоты и удобства
при монтаже и эксплуатации и снижение себестоимости.
Контакторы постоянного и переменного тока имеют в основном одни и те
же конструктивные узлы.
98
99.
Число контактов у контакторов переменного тока может быть от 1 до 5.Наибольшее распространение получили трехполюсные контакторы (они входят
в комплект магнитных пускателей). Дугогасительное устройство по способу
гашения дуги отличается от аналогичных устройств контакторов постоянного тока
тем, что у контакторов переменного тока гашение дуги осуществляется с
помощью коротких дуг, в то время как у контакторов постоянного тока дуга
гасится с помощью магнитного дутья.
Втягивающая катушка контакторов переменного тока отличается тем, что
основным параметром (величиной электрического сопротивления является
индуктивное сопротивление, а не омическое, как в катушке постоянного тока).
Поэтому число витков втягивающей катушки на переменном токе примерно в 10
раз меньше, чем на постоянном.
Магнитная
система
контакторов
переменного
тока
выполняется
шихтованной из листовой электротехнической стали. Магнитные системы
обычно П-, Ш-образные и соленоидные.
Для увеличения износостойкости и надежности применяют гибридные
контакторы. В таких контакторах имеется полупроводниковая приставка,
предназначенная для шунтирования главных контактов.
В гибридных контакторах дуга полностью не устраняется, но она существует на
контактах в течение короткого времени перехода тока с контактов в
полупроводниковую приставку. Переход тока в полупроводниковую приставку
начинается с момента достижения напряжением дуги значения, равного
пороговому напряжению тиристора. Износ главных контактов от этой
кратковременной дуги небольшой и их коммутирующая износостойкость
соизмерима с механической.
Существуют
также
герметизированные
(вакуумные,
герсиконовые)
контакторы. Контактная система герметизированных контакторов работает в
среде инертных газов (или в вакууме). Вакуумные контакторы являются
разновидностью герметизированных контакторов. Они обладают высокой
99
дугогасительной способностью и высокой электрической прочностью.
100.
МАГНИТНЫЕ ПУСКАТЕЛИМагнитный пускатель – электрический аппарат, предназначенный для пуска,
реверса и отключения электродвигателей. Магнитный пускатель, – по существу,
контактор переменного или постоянного тока для коммутации цепей двигателей (при
переменном токе – асинхронного двигателя с короткозамкнутым ротором).
В
магнитный
пускатель
может
встраиваться элемент
(наиболее часто –
тепловое
реле),
который
осуществляет защиту
от токов перегрузки и
«потери фазы». В
этом
случае
магнитный пускатель
представляет,
по
существу,
комплектное
устройство,
включающее
контактор и реле.
100
101.
МАГНИТНЫЕ ПУСКАТЕЛИпо роду тока главных
контактов
по номинальному
напряжению
главной цепи
по виду схемы
включения
электродвигателя
по степени защиты
нереверсивный
реверсивный
по наличию
кнопочного поста
на корпусе
по наличию
дополнительных
(сигнальных,
блокировочных) контактов
по роду тока
по напряжению
втягивающей
катушки
Такой пускатель, помимо защиты и пуска двигателя, позволяет осуществить его
реверс с помощью изменения последовательности чередования фаз. Реверсивный
пускатель содержит два контактора, якоря которых соединены между собой рычагом
механической блокировки.
При пуске «Вперед» замыкаются контакты 1–2. Цепь обмотки контактора КВ
замыкается через размыкающие контакты 1–6 кнопки «Назад». Одновременно
размыкаются размыкающие контакты 4–6 кнопки «Вперед», разрывается цепь катушки
контактора КН. При нажатии кнопки «Назад» вначале размыкаются контакты 1–6,
обесточивается катушка контактора КВ и отключаются его контакты. Затем контактами
4–3 включается контактор КН, после чего замыкаются его контакты. При этом
очередность фаз питания двигателя становится обратной. При одновременном нажатии
кнопок «Вперед» и «Назад» оба контактора не включатся. Это есть электрическая
блокировка. Часто применяется комбинированная блокировка для устранения перегрева
катушки.
101
102.
РЕЛЕ. ОБЩИЕ СВЕДЕНИЯРеле – электрический аппарат, в котором при плавном изменении
управляющего (входного) сигнала до определенной заданной величины
происходит скачкообразное изменение управляемого (выходного) сигнала. При
этом один из сигналов является электрическим.
Реле состоит из трех основных функциональных элементов
Воспринимающий элемент реагирует на входной параметр (ток,
напряжение и т.д.) и преобразует его в физическую величину (например,
электромагнитную силу), необходимую для работы реле. Конструктивное
исполнение воспринимающего элемента определяется в основном
параметром, на которое должно реагировать реле. В реле тока и
напряжения воспринимающий элемент – электромагнит, в реле давления
– мембрана, в реле уровня – поплавок и т.д.
Промежуточный элемент (противодействующие пружины и успокоители в
контактном реле) передает первичное воздействие от воспринимающего
элемента на исполнительный элемент.
Исполнительный элемент (контакты в контактном реле) воздействует на
управляемую цепь.
Реле относится к аппаратам прерывистого управления, так как его рабочее
состояние определяется двумя крайними положениями исполнительного
элемента: «включено» и «выключено».
102
103.
РЕЛЕ. КЛАССИФИКАЦИЯРеле
По области
применения
(с их помощью можно
осуществлять пуск,
реверсирование,
торможение двигателей)
По принципу
действия
В зависимости от
входного сигнала
реле для схем автоматики
реле для управления
реле для регулирования
реле для защиты электропривода
реле для защиты энергосистем
электромагнитные
поляризованные
магнитоэлектрические
электродинамические
индукционные
тепловые
температурные
полупроводниковые
другие
тока
напряжения
реле, реагирующие на максимальное или
мощности
минимальное значения
частоты
другое
Дифференциальное реле (реле реагирует на разность
значений входных сигналов)
Реле обратной мощности (реле реагирует на изменение знака )
Реле реагирует на изменение скорости входного сигнала 103
104.
РЕЛЕ. КЛАССИФИКАЦИЯРеле
контактные реле (воздействуют на управляемую цепь путем
размыкания и замыкания при помощи контактов)
полуПо принципу
проводниковые
воздействия на
бесконтактные
управляемую цепь
реле
магнитные
осуществляют управление за
счет скачкообразного
(релейного) изменения
параметров (активного
сопротивления,
индуктивности) своего
исполнительного элемента,
включенного в управляемую
цепь
первичные реле (включаются в контролируемую цепь
непосредственно)
По способу
вторичные реле (через измерительные трансформаторы
включения
(тока и напряжения)
воспринимающего
промежуточные реле (работают от исполнительных элементов
элемента
других аппаратов и предназначены для усиления сигнала,
увеличения числа управляемых цепей)
По способу
реле прямого действия (реле своим исполнительным
воздействия
элементом непосредственно управляет цепью)
исполнительного
реле косвенного действия (такое реле воздействует своим
элемента на
объект управления исполнительным элементом на цепь через другие аппараты)
безинерционные (время срабатывания меньше 0,001 с)
сверхбыстродействующие (время срабатывания меньше 0,005 с)
В зависимости от
быстродействующие (время срабатывания меньше 0,05 с)
времени
нормальные (время срабатывания 0,05–0,25 с)
срабатывания
замедленные (время срабатывания 0,25–1 с)
реле времени (время срабатывания зависит от уставки) 104
105.
РЕЛЕ. ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИОсновная
характеристика
реле –
характеристика
управления
(характеристика «вход»–«выход»), представляющая зависимость выходного
сигнала y (например, ток через контакты реле) от входного x (например, ток в
катушке электромагнита реле)
В контактных реле при отсутствии входного сигнала контакты разомкнуты
и ток в управляемой цепи равен нулю. Для бесконтактных реле
сопротивление в управляемой цепи достаточно велико и ток имеет
минимальное значение.
Значение входного сигнала, при котором происходит скачкообразное
увеличение выходного сигнала при замыкающем контакте (рис. а, г, д) или
уменьшение выходного сигнала при размыкающем контакте (рис. б), называется
величиной (параметром) срабатывания xср . При x=xср выходной параметр
скачком меняется от ymin до ymax (происходит срабатывание реле).
Величина (параметр) возврата xв – значение входного сигнала, при котором
происходит скачкообразное уменьшение выходного сигнала при замыкающем
контакте (рис. а, г, д) или увеличение выходного сигнала при размыкающем
105
контакте (рис. б)
106.
РЕЛЕ. ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИВремя срабатывания – время с момента подачи сигнала на срабатывание
до начала возрастания или уменьшения выходного сигнала (зависит от
конструкции реле, схемы его включения и входного сигнала).
Время возврата – время с момента подачи сигнала на отключение до
достижения минимального или максимального значения выходного сигнала
называется.
Коэффициент
запаса – отношение входного сигнала к параметру
срабатывания (kз=xраб/xср).
Коэффициент возврата – отношение параметра возврата к параметру
срабатывания (kв=xв/xср=0,2-0,99).
Коэффициент усиления – отношение максимальной мощности нагрузки в
управляемой (выходной) цепи к минимальной мощности входного сигнала
срабатывания.
Уставка по входному сигналу – значение входного сигнала, при котором
происходит срабатывание или возврат.
Чувствительность – минимальная входная мощность, которая еще способна
вызвать скачкообразное изменение выходной величины (в электромагнитном
реле чувствительность характеризуется МДС срабатывания и выражается через
минимальные ток или напряжение срабатывания).
106
107.
РЕЛЕ. ПРЕДЪЯВЛЯЕМЫЕ ТРЕБОВАНИЯТребования, предъявляемые к реле, определяются их назначением.
К реле защиты энергосистем предъявляются требования:
Селективность (способность реле отключать только поврежденный участок
энергосистемы).
Высокое быстродействие позволяет снизить последствия аварии, сохранить
устойчивость системы при аварийных режимах, обеспечить высокое качество
электроэнергии.
Увеличение чувствительности позволяет улучшить качество электротехнических
устройств. Например, повышение чувствительности релейной защиты позволяет сократить
длину линии электропередачи, которая не может быть защищена от аварийных режимов.
Высокая надежность реле не позволяет развиваться тяжелым авариям,
приводящим к недоотпуску большого количества электроэнергии.
Реле защиты энергосистем эксплуатируются, как правило, в облегченных условиях. Они
не подвержены воздействию ударов, вибрации, пыли и газов, вызывающих коррозию.
Так как аварийные режимы в энергосистеме редки, к этим реле не предъявляются
высокие требования в отношении износостойкости.
Реле для управления и защиты электроприводов работают в тяжелых условиях
эксплуатации: возможны удары, вибрация, воздух часто
засорен
пылью
или
агрессивными производственными примесями.
Так как частота включения в современных схемах электропривода достигает 1000–1200
и более включений в час, реле управления должны иметь механическую и
электрическую износостойкость до (1–10)106 циклов. К таким реле предъявляют
определенные требования в отношении вибростойкости.
К реле для схем автоматики предъявляется требование высокой надежности, так как
надежность работы схем автоматики зависит от надежности работы отдельных реле. 107
108.
ТИПЫ РЕЛЕ. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕЭлектромагнитные реле благодаря простоте конструкции и надежности в
работе широко применяются в схемах электропривода и в схемах защиты
энергосистем.
Работа электромагнитных реле основана на электромагнитном принципе.
Такие реле приводятся в действие с помощью электромагнитов постоянного или
переменного тока. Основными системами в конструкции электромагнитных
реле тока и напряжения являются: электромагнитная, механическая
(механизм), контактная.
На рис. изображена схема электромагнитного
реле, контролирующего значение тока нагрузки Iн
в цепи. Сопротивление Zо обмотки реле W
практически не влияет на величину Iнг , так как Zнг
>> Zо .
При достижении током Iнг критического
значения электромагнитная сила Fэ притяжения
якоря 2 к магнитопроводу 1 оказывается
достаточной для преодоления силы возвратной
пружины. Якорь притягивается,
контакты K1
размыкаются и отключают объект управления O1,
а контакты K2 замыкаются и включают объект
управления O2 под напряжение U1.
При уменьшении тока Iнг до определенного
значения сила Fэ
будет недостаточна для
удержания якоря. Под действием силы возвратной
пружины Fпр якорь перейдет в первоначальное
положение и контакты K1 и K2 переключат объекты
O1 и O2 . Таким образом, реле осуществляет
автоматическое управления объектами нагрузки в
108
зависимости от значения тока I .
109.
ТИПЫ РЕЛЕ. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕДля контроля уменьшения входного сигнала используют минимальные
реле (напряжения или тока), контакты которого отключают установку при
снижении напряжения сети ниже допустимого. Напряжением срабатывания таких
реле является напряжение, при котором происходит отпускание якоря, а
напряжением возврата – напряжение, при котором якорь притягивается к
магнитопроводу электромагнита. Коэффициент возврата kв<1.
Существуют реле тока и напряжения, в
которых
предусмотрена
возможность
регулирования
тока
или
напряжения
срабатывания (возврата). Ток срабатывания
можно регулировать изменением числа витков
обмотки,
силы
натяжения
возвратной
пружины, величины рабочего воздушного
зазора.
Для нормальной работы реле его
тяговые характеристики 1, 2 должны быть
согласованы
с
механической
3
(характеристикой противо-действующих сил).
Для срабатывания реле необходимо, чтобы
тяговая характеристика во всех точках хода
якоря проходила выше механической (кривая
109
1), а для возврата – ниже (кривая 2).
110.
ТИПЫ РЕЛЕ. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕНаименьшее значение тока, при котором тяговая характеристика проходит
выше механической, определяет ток трогания Iтр. Коэффициент запаса
kз=Iраб/Iтр=1,4. С ростом kз увеличивается электромагнитная сила, сокращается
время включения, но возрастают удары в механизме и вибрация якоря.
Характеристике 2 соответствует ток возврата Iв.
Для реле защиты энергосистем и электроприводов, контролирующих
значение тока в узких пределах, коэффициент возврата должен быть
возможно ближе к единице.
Для повышения коэффициента возврата сближают тяговую и механическую
характеристики за счет:
увеличения значения воздушного конечного зазора (меняется ток возврата),
уменьшения хода якоря,
выбора формы якоря,
выбора формы полюсов (меняется форма тяговой характеристики).
Высокий коэффициент возврата в реле переменного тока объясняется более
пологой тяговой характеристикой.
Иногда для изменения тока срабатывания меняется начальная сила
возвратной пружины за счет изменения ее натяжения. С ростом начального
натяжения коэффициент возврата уменьшается.
110
111.
ТИПЫ РЕЛЕ. ПОЛЯРИЗОВАННЫЕ РЕЛЕВ поляризованных реле действуют: основной поток, создаваемый обмоткой
электромагнита Фр и дополнительный поляризующий поток от постоянного
магнита Фп, поэтому направление электромагнитной силы, действующей на
якорь, изменяется в зависимости от направления тока в обмотке.
ПЭР обеспечивают: широкие функциональные возможности (состояние контактной
системы зависит от полярности управляющего импульса), возможность управления
кратковременными импульсами (замкнутое состояние сохраняется после снятия сигнала),
высокое быстродействие (несколько миллисекунд), экономичность (после срабатывания не
потребляется мощность), высокие чувствительность (мощность срабатывания – 0,01–0,001
Вт) и коэффициент усиления, возможность создания различных настроек.
Последовательная магнитная цепь применяется редко из-за недостатков: 1) требуется
повышенное значение МДС рабочей обмотки из-за малой магнитной проницаемости
постоянного магнита; 2) постоянный магнит подвержен действию рабочего потока и
111
размагничивается при встречном направлении рабочего и поляризующего потоков.
112.
ТИПЫ РЕЛЕ. ПОЛЯРИЗОВАННЫЕ РЕЛЕПри двухпозиционном исполнении с преобладанием, при отсутствии тока в обмотке,
якорь всегда находится в одном положении (рис. а). Перемещение якоря может
происходить только при определенном направлении тока в обмотке. При отключении тока
якорь возвращается в исходное положение.
При двухпозиционном исполнении без преобладания, при отсутствии тока в рабочей
обмотке, якорь занимает положение около одного или другого полюса электромагнита, в
зависимости от предшествующего направления тока в обмотке (рис. б). Перемещение
якоря происходит при направлении тока в рабочей обмотке, противоположном
направлению, имевшему место при предыдущем включении. После отключения тока
якорь остается в положении, которое он занял в процессе срабатывания.
Существует система с трехпозиционной настройкой. Положение контактов зависит от
полярности предыдущего импульса тока. Якорь, укрепленный на плоской пружине, при
обесточенной катушке находится в нейтральном (среднем) положении. В зависимости от
полярности тока катушки замыкается левый или правый контакт. После отключения тока
112
якорь возвращается в нейтральное положение (рис. в).
113.
ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИРеле времени служат для создания выдержки времени между
срабатываниями нескольких аппаратов в схемах защиты автоматики и при
автоматизации технологических процессов.
К таким реле предъявляется требование стабильности выдержки времени
при колебаниях напряжения, частоты питания, температуры и т.д.
Для схем автоматического управления электроприводом требуемые выдержки
времени находятся в пределах 0,25–10 с. Разброс времени срабатывания может
составлять 10 %. Реле для защиты энергосистем должны иметь большую
точность выдержки времени. Требуемые выдержки времени таких реле – 0,1–
20 с. Для автоматизации технологических процессов необходимы реле с
большой выдержкой времени – от нескольких часов до нескольких минут. В
этом случае, как правило, используют моторные и полупроводниковые реле.
РЕЛЕ
ВРЕМЕНИ
реле времени с электромагнитным замедлением
реле с пневматическим замедлением
реле с анкерным механизмом
полупроводниковые реле
моторные реле
113
114.
ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИВ реле времени с электромагнитным замедлением использован принцип
электромагнитного замедления. В качестве короткозамкнутой обмотки
используется алюминиевая или медная гильза, надеваемая на сердечник. При
включении обмотки электромагнита реле или при ее отключении в такой гильзе
наводится ЭДС и вихревые токи, создающие поток, препятствующий изменению
потока обмотки электромагнита. При этом замедление при срабатывании
небольшое (доли секунды) из-за малой индуктивности и постоянной времени при
большом (начальном) зазоре. Замедление при отпускании может достигать
десяти секунд, так как при отпускании проводимость конечного зазора большая,
и, следовательно, большая индуктивность и постоянная времени. Для получения
большой выдержки времени при отпускании необходима высокая магнитная
проводимость рабочего и паразитного зазоров в замкнутом состоянии магнитной
системы. С этой целью все соприкасающиеся детали магнитопровода и якоря
тщательно шлифуются.
Магнитная цепь такого реле делается насыщенной для того, чтобы уменьшить
зависимость магнитного потока и выдержки времени от питающего напряжения.
114
115.
ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИНа рис. а изображена конструктивная схема реле с электромагнитным
возбуждением. Здесь 1 – катушка электромагнита; 2 – магнитопровод; 3 –
короткозамкнутая гильза; 6 – якорь. Время срабатывания при отпускании можно
регулировать изменением толщины немагнитной прокладки 7. Уменьшение
толщины прокладки увеличивает проводимость, индуктивность, постоянную
времени и соответственно время отпускания реле (рис. б). Чем больше сила
пружины 4, регулируемая гайкой 5, тем больше поток отпускания и тем меньше
время срабатывания при отпускании (рис. в).
115
116.
ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИУ реальных магнитных материалов после отключения намагничивающей
обмотки поток спадает до остаточного потока, который определяется свойствами
материала магнитопровода, геометрическими размерами магнитной цепи и
магнитной проводимостью рабочего зазора. При большом остаточном потоке
возможно залипание якоря (якорь остается в притянутом состоянии после
отключения обмотки электромагнита). Для устранения залипания используется
тонкая немагнитная прокладка.
Реле времени с электромагнитным замедлением:
достаточно просты по конструкции;
обладают большой ударо-, вибро- и износостойкостью;
допустимое число включений достигает 600 в час;
могут использоваться в схемах автоматики и электропривода как реле тока,
напряжения и промежуточные;
коэффициент возврата низок и составляет 0,1–0,3;
выдержки времени при отпускании – 0,3–5 секунд.
Промышленностью выпускаются многочисленные модификации реле с
электромагнитным замедлением. Реле имеют один или два унифицированных
контактных узла. Каждый узел имеет один замыкающий и один размыкающий
контакты с общей точкой. Постоянный ток включения контактов составляет 10 А
при напряжении 110 В и 5 А при 220 В. Ток отключения для индуктивной нагрузки
– 0,2 А, для активной нагрузки – 0,5 А.
116
117.
ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИВ реле с пневматическим замедлением и анкерным механизмом
электромагнит постоянного или переменного тока воздействует на контактную
систему через замедляющее устройство в виде пневматического демпфера или
часового (анкерного) механизма. Выдержка времени меняется при регулировке
этого устройства. Преимуществами такого реле являются возможность питания
как постоянным, так и переменным током и независимость от напряжения,
частоты питания, температуры. Реле с пневматическим замедлением РВП
применяется в схемах электропривода металлорежущих станков и других
механизмов. Такое реле позволяет регулировать выдержку времени в диапазоне
от 0,4 до 180 секунд с точностью ±10% .
В замедлителях в виде анкерного механизма его пружина заводится под
воздействием электромагнита. Контакты реле приходят в движение лишь после
того, как связанный с ними анкерный механизм отсчитает определенное время
уставки. Выдержка времени у этих реле регулируется в пределах от 7 до 17
секунд с точностью ±10% уставки. В реле имеются и нерегулируемые контакты,
которые связаны с якорем электромагнита и используются в цепях, не требующих
выдержки времени. Реле надежно работают при напряжении питания до 0,85Uн.
Износостойкость анкерного механизма составляет всего 15000 срабатываний,
поэтому такие реле не применяют при частых включениях.
В состав моторных реле времени входит электродвигатель с заданной
частотой вращения. Промышленностью выпускаются реле на выдержки времени
от 1 секунды до 26 минут с различным исполнением контактов. Точность работы
реле составляет ±5 секунд. Реле позволяет устанавливать различную выдержку
времени в пяти независимых цепях. Износостойкость реле – не менее 1000
117
циклов.
118.
ТИПЫ РЕЛЕ. ГЕРКОНОВЫЕ РЕЛЕГерконовые реле – это реле с герметичными магнитоуправляемыми
контактами. Контакты герконовых реле 1, 2, 3 (контактные сердечники)
помещаются в стеклянный баллон с инертным газом или вакуумом (рисунок).
Контакты в этих реле выполняют функции магнитопровода, токопровода и
возвратной пружины.
При подаче тока в обмотку w (рис. а) возникает магнитный поток Ф и
электромагнитная сила, притягивающая контакты. Если отключить ток, то под
действием собственных упругих сил контакты разомкнуться. Изменение
полярности тока в обмотке управления поляризованного реле (рис. б) вызывает
переключение контактов (1 и 2 или 1 и 3).
Существуют разновидности герконов с ртутными контактами. В небольшом
объеме ртути (подвижный контакт), содержащемся в герметичном баллоне,
размещается ферромагнитная деталь (поплавок). Под действием магнитного поля
управляемой катушки эта деталь погружается в ртуть и поднимает ее уровень до
замыкания неподвижных контактов.
118
119.
ТИПЫ РЕЛЕ. ГЕРКОНОВЫЕ РЕЛЕГерконы имеют преимущества:
благодаря полной герметизации могут работать в неблагоприятных условиях
окружающей среды;
могут работать при неблагоприятных параметрах (при низком переходном
сопротивлении, малом напряжении на контактах);
имеют простую конструкцию, малые массы и габариты;
имеют высокое быстродействие (1–3 мс), высокую частоту коммутаций – 1000
включений в секунду,
имеют высокую электрическую прочность межконтактного промежутка;
в них отсутствуют трущиеся детали;
обеспечивают удобство согласования с современными изделиями
микроэлектроники и надежность работы в широком диапазоне температур;
их износостойкость достигает десятков и сотен миллионов срабатываний.
Герконы имеют следующие недостатки:
восприимчивость к внешним магнитным полям (необходима защита),
хрупкость стеклянного баллона,
чувствительность к ударам и вибрациям (необходима амортизация мест
установки герконов),
значительное время вибрации контактов,
малую мощность коммутируемых цепей,
возможность самопроизвольного размыкания контактов при больших токах,
значительный технологический разброс параметров.
Герконовые реле используются в схемах автоматики и защиты в качестве
логических элементов, в качестве преобразователей неэлектрических величин в
электрические, как электромеханические усилители сигналов между
полупроводниковыми устройствами и силовыми электрическими аппаратами. 119
120.
ТИПЫ РЕЛЕ. ТЕПЛОВЫЕ РЕЛЕТепловые реле предназначены для защиты электроустановок, главным
образом электрических машин, от перегрева при длительных перегрузках.
Тепловое реле срабатывает при определенной температуре нагрева
основного чувствительного элемента. В качестве чувствительного элемента
наибольшее распространение получили биметаллические элементы. Нагрев
элемента может быть:
непосредственным (за счет тепла, выделяемого током нагрузки),
косвенным (за счет тепла нагревательного элемента НЭ),
комбинированным.
Биметаллический элемент состоит из двух пластин металла (с различными
температурными коэффициентами линейного расширения), соединенных
сваркой или прокаткой в горячем состоянии. В тепловых реле применяются
биметаллы, у которых в качестве термореактивного материала (с большим
значением коэффициента) используется железоникелевый сплав – инвар, а в
качестве термоактивного материала (с меньшим значением коэффициента) –
хромоникелевые, молибденоникелевые стали.
Если такой элемент закрепить неподвижно и нагреть, то произойдет его
изгиб в сторону металла с меньшим коэффициентом линейного расширения.
Механическая сила, затрачиваемая на преодоление сил, противодействующих
изгибу, используется для воздействия на исполнительные элементы реле –
120
контакты.
121.
ТИПЫ РЕЛЕ. ТЕПЛОВЫЕРЕЛЕ
Конструктивная схема реле (рис. а): 1 и 2
– биметаллическая пластина в различных
положениях; 3 – кнопка ручного возврата; 4
и 5 – контакты; 6 – пластмассовая
колодка; 7 – пружина; 8 – упор. В данном
реле происходит мгновенный переброс
контактов из одного положения в другое, и
нажатие на контакты не зависит от усилия,
развиваемого биметаллической пластиной.
В момент достижения предельно
допустимой температуры защищаемого
объекта (например, обмотки машины)
биметаллический
элемент
должен
нагреться до температуры срабатывания
(т.е. до температуры, при которой реле
замыкает или размыкает свои контакты).
Время срабатывания реле с момента появления перегрузки зависит от начальной
температуры окружающей среды, величины тока и конструкции реле.
Одной из основных характеристик тепловых реле является токовременная
характеристика, выражающая зависимость времени срабатывания реле от тока,
протекающего через него (рис. б). Для осуществления надежной защиты необходимо
согласовать токовременную характеристику реле с перегрузочной характеристикой
двигателя. При правильно выбранном реле его характеристика (кривая 1) должна
располагаться ниже и вблизи характеристики нагрева двигателя (кривая 2). В
эксплуатационных условиях согласование характеристик реле и двигателя достигается
выбором реле с номинальным током, равным номинальному току двигателя. В этом
121
случае обычно обеспечивается срабатывание реле примерно при (1,2–1,3)I .
122.
ТИПЫ РЕЛЕ. ТЕПЛОВЫЕ РЕЛЕСущественным недостатком тепловых реле является зависимость времени действия
от температуры окружающей среды. Такая зависимость приводит к тому, что, например,
при температуре 80–90 градусов реле может отключить цепь даже при отсутствии тока.
Поэтому для получения благоприятной защитной характеристики необходимо, чтобы
температура окружающей среды для защищаемого объекта и реле совпадала или чтобы
биметаллический элемент работал при более высоких температурах.
Тепловые реле с биметаллическими элементами не обеспечивают защиту от токов
короткого замыкания, так как постоянная времени срабатывания реле значительно
больше длительности процесса короткого замыкания.
122
Реле снабжаются регулятором уставок тока.
123.
ДАТЧИКИ. ПОНЯТИЕ. КЛАССИФИКАЦИЯДатчики (первичные преобразователи) – аппараты, предназначенные для
контроля и (или) измерения параметров.
Области применения: автоматика, телемеханика, информационноизмерительная техника.
Электрические датчики преобразуют различные физические величины в
эквивалентные электрические сигналы. Изменение выходного электрического
параметра
приводит к изменению (коммутации) тока или появлению
электродвижущей силы в электрической цепи на выходе датчика.
Датчики
Энергия выходного сигнала
резисторные
обеспечивается за счет
энергии входного сигнала,
значит мощность
емкостные
выходного сигнала меньше
входного. Для таких
индуктивные
датчиков необходимы
электрические источники
питания.
трансформаторные
К генераторным относятся
индукционные
датчики, использующие
эффект наведенной
электродвижущей силы. В
пьезоэлектрические
таких датчиках
осуществляется
термоэлектрические
непосредственное
входной
на основе эффекта Холла преобразование
величины в выходную.
перемещения
уровня
давления
угла поворота
расхода
скорости
момента вращения
ускорения
температуры
размеров
параметров вибраций
и т.д.
контактные
бесконтактные
123
параметрические
(пассивные)
В зависимости
по виду входной
от способа
величины:
преобразования
входной
генераторные
величины
(активные)
В зависимости
от входной
величины
датчики
По типу
коммутации
124.
ДАТЧИКИ. ХАРАКТЕРИСТИКИ И ПАРАМЕТРЫСтатическая характеристика датчика.
Номинальная характеристика
Паспортная (расчетная, номинальная)
и реальная (действительная)
характеристики датчика
Основная характеристика датчика – статическая характеристика
(характеристика
управления), представляющая
зависимость
выходной
величины y от входной величины x.
Статическая характеристика может быть линейной и нелинейной.
Нелинейность характеристики обусловлена физическими свойствами датчиков:
наличием в них насыщения, неоднородности магнитного поля и т.д. Статическая
характеристика ограничивается нижними (xmin, ymin) и верхними (xmax, ymax)
124
предельными значениями входной и выходной величин.
125.
ДАТЧИКИ.ХАРАКТЕРИСТИКИ
И
ПАРАМЕТРЫ
Чувствительность датчика представляет отношение приращений выходной и
входной величин. Для нелинейной статической характеристики чувствительность
является функцией входной величины. При линейной статической характеристике
чувствительность имеет постоянное значение.
Коэффициент преобразования – это отношение значения выходной
величины к соответствующему значению входной величины. У датчиков с
линейной характеристикой чувствительность и коэффициент преобразования
равны.
Остаточный сигнал – значение выходной величины при нулевой входной
величине. Остаточный сигнал отрицательно сказывается на точности
измерений, так как при этом в зоне малых значений x падает чувствительность.
Порог чувствительности представляет минимальное значение входной
величины, вызывающее изменение выходной величины, которое может быть
измерено.
Номинальной
характеристикой
датчика
называют
статическую
характеристику, данную в паспорте датчика. Экспериментально снятая
характеристика отличается на величину погрешности.
Абсолютная
погрешность
представляет
собой
разность
между
номинальным (расчетным) значением выходной величины и полученным
(действительным) ее значением
.
Точность
преобразования
датчика
характеризуется
относительной
погрешностью.
Относительная погрешность рассчитывается как отношение абсолютной
погрешности к номинальному значению выходной величины 0 y / yн ( yн yд ) / yн .
На погрешность оказывают влияние внешние условия эксплуатации:
температура, магнитные и электрические поля, влажность, напряжение и частота
источника питания, механические и радиационные воздействия и т.д.
Длительность переходного процесса определяет быстродействие датчика. 125
126.
ДАТЧИКИ. ПРЕДЪЯВЛЯЕМЫЕ ТРЕБОВАНИЯВысокая чувствительность.
Малая погрешность.
Необходимый диапазоном изменения входной величины.
Возможность согласования со схемой управления.
Минимальное обратное воздействие датчика на входную величину.
Малая инерционность (при быстрых изменениях входной величины).
Параметры
и
характеристики
стабильными во времени.
датчика
должны оставаться
Параметры
и
характеристики
датчика
стабильными при изменении условий работы:
должны оставаться
• температуры,
• давления,
• влажности среды,
• положения датчика в пространстве
• и т.д.
126
127.
ДАТЧИКИ. РЕЗИСТОРНЫЕ ДАТЧИКИРезисторные датчики предназначены для измерения перемещения и
сил.
Принцип действия резисторных датчиков основан на изменении
электрического сопротивления R при изменении длины l , сечения S
или удельного сопротивления материала резистора ρ, так как в общем
случае сопротивление зависит от этих параметров:
l
R
S
потенциометрические
тензорезисторные
резисторные
датчики
терморезисторные
проволочные потенциометрические
проволочные
проводниковые
фольговые
полупроводниковые
проводниковые
позисторы
полупроводниковые
термисторы
магниторезисторные
127
128.
ДАТЧИКИ. ПОТЕНЦИОМЕТРИЧЕСКИЕ ДАТЧИКИПотенциометрические датчики предназначены для измерения угловых или
линейных перемещений. С их помощью можно измерить уровень и расход
жидкости, силу, размеры и т.д.
В потенциометрических датчиках изменение сопротивления происходит за
счет изменения длины проводника.
Потенциометрические датчики представляют собой переменный резистор,
подвижный контакт которого перемещается. Величина сопротивления зависит от
положения подвижного токосъемного контакта. В потенциометрических
датчиках механическое перемещение преобразуется в соответствующее
изменение напряжения или тока.
Проволочные потенциометрические датчики непрерывной намотки: каркаса,
на который намотана обмотка 2, и токосъемный контакт в виде щетки 1.
128
129.
ДАТЧИКИ. ПОТЕНЦИОМЕТРИЧЕСКИЕ ДАТЧИКИДля обмоточного провода используются сплавы с высоким удельным
сопротивлением (манганин, константан, нихром). Наилучшей температурной
стабильностью обладают резистивные датчики, выполненные из состаренных
(подвергнутых циклическому нагреву до 120–130 °С с
последующим
охлаждением до комнатной температуры) сплавов.
Для уменьшения реактивной составляющей намотку проволочных датчиков
выполняют на специальных каркасах бифилярно, т.е. наматывают одновременно
двумя проводниками.
Характеристики
реальных
потенциометрических
датчиков
имеют
ступенчатый характер, так как перемещения щетки с одного витка провода на
другой вызывает скачкообразное изменение выходного напряжения.
Для получения нелинейной характеристики датчика, работающего без
нагрузки,
применяют
неоднородную
намотку,
фигурный
каркас,
шунтирование участков обмотки и т.д.
Погрешность работы датчиков зависит от стабильности питающего
напряжения, точности изготовления конструктивных деталей, температурной
стабильности проводникового материала.
Достоинствами потенциометрических датчиков являются малые масса и
габариты, сравнительная простота конструкции, высокая точность работы
(погрешность составляет до 0,1 %), возможность питания от источника как
постоянного, так и переменного тока.
Основной недостаток – наличие подвижного контакта и влияние нагрузки
на линейность характеристики.
129
130.
ДАТЧИКИ. СХЕМЫ ВКЛЮЧЕНИЯПОТЕНЦИОМЕТРИЧЕСКИХ ДАТЧИКОВ
Наиболее простой является реостатная схема (рис. а) включения датчика.
Применяется также параметрическая схема (рис. б). Если
входное
сопротивление измерительной схемы велико, то выходное напряжение Uвых
зависит от α или x и не зависит от R0. В реверсивном потенциометрическом
датчике (рис. в) имеется отвод от средней точки обмотки, от которой происходит
отсчет перемещения щетки. При изменении направления перемещения щетки от
средней точки обмотки происходит изменение знака выходного напряжения. В
схеме (рис. г) при перемещении левого подвижного контакта вниз правый с
помощью механической передачи движется вверх. Чувствительность при этом
130
возрастает в 2 раза.
131.
ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИТензорезисторные датчики предназначены для измерения деформаций,
возникающих под действием внешних сил. В тензорезисторных датчиках
изменение сопротивления происходит за счет изменения трех величин: длины
проводника, сечения и удельного сопротивления.
Принцип действия таких датчиков основан на явлении тензоэффекта,
заключающегося в изменении активного сопротивления проводниковых и
полупроводниковых материалов под воздействием приложенных к ним
механических напряжений.
При наличии внешней силы происходит деформация проводника как в
направлении действия силы, так и в перпендикулярном направлении.
Деформация в направлении действия силы в области упругих деформаций
происходит в соответствии с законом Гука
модуль упругости
механическое напряжение в проводнике
длина проводника
изменение длины проводника в результате деформации
относительная продольная деформация
коэффициент Пуассона
относительная поперечная деформация
131
132.
ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИОтносительное изменение сопротивления проводника
Тензоэффект различных материалов характеризуется
коэффициентом тензочувствительности
Характеристика управления проволочных резисторов
определяется выражением
Для увеличения чувствительности тензорезисторного датчика выбираются
материалы с:
высоким коэффициентом тензочувствительности (например, константан),
большим удельным сопротивлением,
малым поперечным сечением.
132
133.
ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИПроводниковые тензорезисторные датчики могут быть проволочными и
фольговыми. Вторые имеют большую площадь охлаждения и могут пропускать
больший ток.
Проволочные тензорезисторные датчики представляют собой тонкую
проволоку (диаметр 0,01–0,05 мм), уложенную зигзагообразно между двумя
электроизоляционными подложками, скрепленными клеем или лаком. К концам
проволоки присоединяются выводы.
С помощью лака или клея тензодатчик прочно крепится на детали,
механическая деформация которой (или сила, действующая на деталь)
Д
Д
контролируется.
При растяжении (или сжатии)
детали аналогичную деформацию
претерпевает и тонкая проволока
тензодатчика,
что
вызывает
изменение
ее
электрического
сопротивления. Если проволочный
элемент П тензодатчика, наклеенный
на
деформируемую
деталь
Д,
включить в одно из плеч мостовой
схемы,
то
изменение
его
133
сопротивления на ∆R при деформации
134.
ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИдетали силой F вызовет разбаланс в схеме моста. Измерительный элемент ИЭ в
диагонали схемы зафиксирует соответствующий ток небаланса iнб. Для
компенсации температурной погрешности тензодатчика нередко в другое плечо
моста включается идентичный элемент, сопротивление которого остается
неизменным, т.к. он крепится на детали, не подверженной деформации.
Фольговые датчики аналогичны проволочным. Фотохимический способ
позволяет создать любой рисунок, что является преимуществом фольговых
датчиков.
Применяются также полупроводниковые тензорезисторные датчики,
основными достоинствами которых являются малые размеры, высокий уровень
выходного
сигнала,
высокий
коэффициент
тензочувствительности.
Полупроводниковые тензорезисторы имеют в десятки раз большую
тензочувствительность по сравнению с обычными. Тензорезисторы n-типа имеют
отрицательный коэффициент тензочувствительности, а p-типа – положительный.
Недостаток таких датчиков – разброс параметров, достигающий 20 % в
одной партии, достоинство – термическая стабильность.
Тензорезисторы широко используются в тензометрировании.
134
135.
ДАТЧИКИ. ТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИТерморезисторные датчики предназначены для измерения температуры
деталей машин, приборов, механизмов.
Принцип действия таких датчиков основан на изменении электрического
сопротивления проводниковых и полупроводниковых материалов при изменении
их температуры. В терморезисторных датчиках используются
материалы,
обладающие большим и стабильным температурным коэффициентом
сопротивления и линейной зависимостью сопротивления от температуры.
Проводниковые терморезисторные датчики изготавливаются из платины,
меди, никеля, железа, вольфрама и др. материалов.
Зависимость сопротивления от температуры с некоторым приближением
имеет вид R = R0(1 + αθ) (R0 – сопротивление проводника при температуре 0
°С; θ – превышение температуры проводника относительно 0 °С; α –
температурный коэффициент сопротивления).
На точность работы влияют:
изменение свойств материалов со временем,
нестабильность сопротивления токоподводящих проводов,
дополнительный нагрев датчиков при прохождении по ним тока.
Погрешность измерений составляет 0,5–1 %. Для увеличения чувствительности
выбираются материалы с большим температурным коэффициентом
сопротивления. Конструктивно терморезисторный датчик представляет собой
бифилярную обмотку из тонкой проволоки, размещенную на изоляционном
каркасе, вставленную в специальный чехол с выводами.
135
136.
ДАТЧИКИ. ПОЛУПРОВОДНИКОВЫЕТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИ
Как элементы различных датчиков широкое распространение получили
полупроводниковые
термосопротивления (терморезисторы),
имеющие
сильно выраженную зависимость сопротивления от температуры.
Среди полупроводниковых терморезисторов различают позисторы и
термисторы. Первые из них характеризуются положительным температурным
коэффициентом сопротивления, вторые – значительным отрицательным.
Полупроводниковые
терморезисторы,
наряду
с
более высокой
чувствительностью по сравнению с обычными, обладают такими
недостатками, как нелинейность и узкий температурный диапазон.
Максимальная рабочая температура полупроводниковых терморезисторов не
может превышать 300 °С, в то время как для вольфрамовых терморезисторов она
может достигать 3000 °С.
Сопротивление термистора уменьшается с повышением температуры по
экспоненциальному закону
превышение температуры
термистора относительно 0°С
температурный коэффициент термистора;
обычно α = (0,03 - 0,06) град −1
сопротивление термистора при температуре 0 °С
136
137.
ДАТЧИКИ. ПОЛУПРОВОДНИКОВЫЕТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИ
Конструктивно
термисторы представляют из
себя тело дисковой, шаровой
или
других
форм
с
металлическими выводами,
покрытое слоем лака или
стекла или помещенное в
герметичный
стеклянный
баллон для защиты от влаги.
Термисторы изготовляют
прессованием и отжигом
измельченных
оксидов,
сульфидов, нитридов или
карбидов металлов.
Чувствительность
термисторов в 5–30 раз
выше, чем чувствительность
проводниковых
терморезисторов.
137
138.
ДАТЧИКИ. ПОЛУПРОВОДНИКОВЫЕТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИ
Термисторы находят применение для ограничения пусковых токов
электродвигателей в качестве датчиков-ограничителей тока.
Способность термисторов существенно изменять свое сопротивление при
изменении условий охлаждения определила их применение в качестве датчиков
измерения температуры окружающей среды.
Если термистор поместить в поток жидкости или газа, то температура его
нагрева протекающим по нему током будет зависеть от скорости этого потока.
Следовательно, термистор можно использовать в качестве датчика скорости
движения жидкости или газа, а при соответствующей схеме включения
нескольких термисторов – в качестве датчика направления потока.
Термистор может быть и датчиком уровня жидкости. Погруженный в
жидкость термистор имеет определенную температуру. Если уровень жидкости
понизится и термистор окажется в воздухе, то его температура и сопротивление
изменятся, так как условия охлаждения будут другими.
Термистор может быть датчиком степени разрежения воздуха (вакуума). С
понижением давления воздуха ухудшаются условия передачи тепла от
термистора, расположенного в этой среде.
138
139.
ДАТЧИКИ. МАГНИТОРЕЗИСТОРНЫЕ ДАТЧИКИМагниторезисторные датчики являются менее распространенными
резистивными датчиками.
Их действие основано на эффекте Гаусса (увеличение сопротивления
полупроводника при внесении его в магнитное поле): регулируя напряженность
магнитного поля, можно управлять сопротивлением резистора.
Такие датчики предназначены для измерения индукции магнитного поля.
Основная
характеристика
магниторезисторного
датчика –
зависимость его сопротивления от
индукции магнитного поля.
139
140.
ДАТЧИКИ. МАГНИТОРЕЗИСТОРНЫЕ ДАТЧИКИВ интервале малых индукций характеристика нелинейна, а при больших
значениях индукции практически линейна.
В слабых полях (0,3–0,5 Тл) зависимость сопротивления от индукции
квадратичная:
текущее значение индукции В
коэффициент пропорциональности
значение активного сопротивления при индукции B = 0
значение активного сопротивления при текущем значении индукции B
При больших индукциях зависимость становится линейной:
значение сопротивления на оси ординат, соответствующее
продолжению прямой линии
коэффициент пропорциональности
Квадратичная зависимость создает при некоторых применениях затруднения,
поэтому используют поле предварительного смещения с индукцией 0,3–0,5 Тл.
140
141.
ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИЕмкостные датчики служат для измерения перемещений, размеров
деталей, уровня жидкости, механических напряжений, температуры.
Принцип действия емкостных датчиков основан на изменении емкости
конденсатора под воздействием входной величины.
Такие датчики нашли широкое применение в схемах автоматики и
измерительных приборов благодаря высокой чувствительности, малым
габаритам, массе и инерционности, простой технологии изготовления.
Недостатки емкостных датчиков:
большое внутреннее емкостное сопротивление, что делает эти датчики
маломощными;
необходимость работы на высокой частоте источника питания;
сильное влияние паразитных емкостей на точность работы датчика;
влияние посторонних электрических полей,
влияние изменения температуры ,
влияние изменения влажности среды.
Недостатки емкостных датчиков вызваны тем, что при реальных технически
целесообразных размерах удается получить небольшие их собственные емкости
(10–50 пФ).
141
142.
ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИУстройство емкостных датчиков и графики изменения их емкости при
изменении площади перекрытия пластин (электродов) в результате смещения
одной пластины конденсатора относительно другой (рис. а); при изменении
диэлектрической проницаемости среды (рис. б) и изменении воздушного зазора
между пластинами конденсатора (рис. в).
Конструктивно емкостной датчик представляет собой плоскопараллельный
или цилиндрический конденсатор переменной емкости.
Одна из пластин неподвижна и механически соединена с корпусом
контролируемого устройства, а вторая подвижна и соединяется с деталью,
перемещение которой измеряется.
142
143.
ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИДатчики с изменением величины воздушного зазора и площади перекрытия
используются обычно для измерения линейных и угловых перемещений,
размеров деталей, а датчики с изменением диэлектрической проницаемости –
для измерения уровней непроводящих жидкостей.
Емкостной датчик перемещения с изменяющимся воздушным зазором
применяют в случае небольшого диапазона изменения контролируемой
величины, так как чувствительность зависит от измеряемого перемещения.
Емкостной датчик перемещения с переменной площадью перекрытия
используется, в частности, для измерения угла поворота вала. Достоинством
таких датчиков является возможность соответствующим выбором формы
подвижной и неподвижной пластин получить заданную зависимость между
изменением емкости и входным угловым или линейным перемещением.
Для повышения чувствительности емкостных датчиков применяют
дифференциальные
конструкции
конденсаторных
систем, которые
используются для построения датчика угловых перемещений.
На работу емкостных датчиков оказывают влияние колебания температуры и
влажности окружающей среды. Для устранения этого влияния применяют сплавы
с малым температурным коэффициентом линейного расширения и герметизацию
датчика.
143
144.
ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИПример конструкции, использованной для построения датчика угловых перемещений.
При повороте средней пластины 3 и увеличении угла α емкость с пластины 3 на
пластину 1 увеличивается (площадь S1), а емкость с пластины 3 на пластину 2
уменьшается (площадь S2). Если эти емкости (С1 и С2) включить в мостовую схему,
включающую также постоянные емкости С3 и C4 и питаемую от источника высокой
частоты Uв.ч , то неравенство С1 ≠ С2 приведет к появлению в диагонали моста тока
небаланса, измеряемого элементом ИЭ. Выбором формы пластин 1, 2 и 3 можно добиться
любого вида зависимости емкостей С1 и С2 от угла поворота α. Расстояние между
пластинами измеряется десятыми долями миллиметра. Такие датчики позволяют измерять
весьма малые углы, соответствующие линейным перемещениям по наружной окружности
до 10 см–5.
144
145.
ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИИндуктивные датчики служат для измерения перемещений и сил. Принцип
действия таких датчиков основан на изменении индуктивности обмотки,
включенной в цепь переменного тока.
Достоинствами индуктивных датчиков являются большие надежность и
срок службы ввиду отсутствия скользящих контактов. К недостаткам относятся
наличие остаточного сигнала, чувствительность к изменению напряжения
питания, наличие фазовых искажений и гальванической связи выходной цепи с
цепью питания. Работают такие датчики только на переменном токе.
Индуктивность обмотки зависит от
величины сопротивления немагнитного
зазора и сопротивления магнитопровода.
Сопротивление немагнитного
зазора
может изменяться
за счет изменения
величины зазора или его площади.
На
рисунке представлен датчик
с
изменяемым зазором. Датчик состоит из
магнитопровода 1 с обмоткой возбуждения
2 и подвижного якоря 3. При перемещении
якоря изменяется сопротивление магнитной
цепи и индуктивность обмотки. Если
пренебречь магнитным сопротивлением
стали, потоками рассеяния и выпучивания, то
индуктивность обмотки
145
146.
ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИВыходное напряжение датчика (индуктивное
сопротивление обмотки много больше активного)
Зависимость выходного напряжения от зазора дана
на рисунке. Реальная характеристика индуктивного
датчика не проходит через начало координат. Это
объясняется тем, что при δ= 0 сопротивление цепи
имеет
конечное
значение
и
индуктивное
сопротивление обмотки не равно ∞.
На рисунке показано применение индуктивного
датчика для контроля давления Р в закрытом
резервуаре. Увеличение
давления
приводит к
перемещению вниз якоря Я и уменьшению
воздушного зазора δ в магнитной системе датчика.
Изменение воздушного зазора
в магнитной
системе, вызванное изменением давления Р,
фиксируется измерительным элементом ИЭ через
соответствующую величину тока, частота которого
обычно лежит в пределах 100–3000 Гц.
Индуктивные датчики такого типа имеют
следующие недостатки: фаза выходного напряжения
зависит от величины воздушного зазора; на якорь
действует значительная электромагнитная сила;
характеристика управления расположена только в
146
первом квадранте.
147.
ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИБолее широкое применение получили реверсивные датчики, имеющие лучшие
характеристики. Дифференциальный реверсивный датчик содержит две совершенно
одинаковые и симметрично расположенные электромагнитные системы.
В нейтральном положении якоря индуктивности обмоток равны.
Токи обмоток равны по величине и имеют противоположное направление, в результате
чего ток нагрузки и выходное напряжение равны нулю. С увеличением перемещения якоря
от нейтрального положения выходное напряжение растет по закону, близкому к
линейному, при значительных перемещениях происходит замедление роста выходного
напряжения, так как при больших зазорах одна из индуктивностей меняется мало.
Изменение знака выходного напряжения при изменении направления перемещения
означает изменение фазы выходного напряжения на 180°.
Реверсивный датчик также
может быть включен по мостовой
схеме (рис. а).
Реверсивные датчики имеют
следующие преимущества перед
нереверсивными: линейная часть
выходной характеристики имеет
большую протяженность (рис. б);
электромагнитное
усилие,
действующее на якорь, значительно
меньше (это объясняется частичной
компенсацией
электромагнитных
147
усилий).
148.
ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИДля точного измерения больших перемещений
применяются линейные и круговые датчики с
зубчатыми сердечниками, позволяющие измерять также
линейное и угловое перемещение путем счета периодов
изменения выходного сигнала в процессе движения
подвижной части.
Индуктивные
датчики
с
подвижными
экранами измеряют
механические
перемещения.
При
перемещении экрана в таких датчиках
меняется реактивное сопротивление
немагнитного зазора, а следовательно и
индуктивное сопротивление обмотки.
Индуктивные магнитоупругие датчики предназначены
для измерения значительных механических сил. Принцип
действия таких датчиков основан на магнитоупругости
(изменении проницаемости ферромагнитных тел под
воздействием
механических
сил).
Хорошими
магнитоупругими
свойствами
обладают
железоникелевые и железокобальтовые сплавы.
При изменении силы, действующей на магнитопровод,
меняется полное электрическое сопротивление обмотки и
148
соответственно напряжение и ток в схеме.
149.
ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИТрансформаторные датчики применяются для измерения механических
перемещений и сил. Они представляют собой трансформаторные устройства с
переменной магнитной связью между первичной и вторичной обмотками.
Достоинствами
трансформаторных
датчиков
являются
отсутствие
гальванической связи между источником питания и цепью нагрузки и
скользящего контакта между подвижной и неподвижной частями, а также
простые конструкция и технология изготовления.
К недостаткам датчиков относятся наличие остаточного сигнала и
подверженность помехам со стороны электромагнитных полей.
Трансформаторные
датчики
датчики с перемещающимся якорем
датчики с перемещающимся
электромагнитным экраном
(короткозамкнутым витком)
датчики с перемещающейся обмоткой
149
150.
ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИТрансформаторные
датчики
с
перемещающимся якорем не имеют подвижной
обмотки.
При
смещении
якоря
происходит
перераспределение магнитных потоков в крайних
стержнях, так как меняется проводимость воздушных
зазоров и на выходе появляется сигнал, зависящий от
смещения
якоря; фаза
сигнала
соответствует
направлению смещения.
На якорь датчика действует электромагнитная сила,
которая
нагружает подшипники и, кроме того,
стремится вернуть якорь в исходное положение.
Магнитная система датчика с перемещающимся
короткозамкнутым витком имеет
зазор между
средним
стержнем
2
и
горизонтальным
магнитопроводом 4. Короткозамкнутый виток 3
охватывает магнитопровод и может свободно
перемещаться вдоль него. Первичная обмотка надета
на средний стержень, а последовательно и
встречно
включенные
сигнальные
обмотки
расположены на боковых стержнях 1 и 5. Первичная
обмотка создает поток Ф1, разветвляющийся на
потоки Ф2 и Ф3. При отклонении витка от
симметричного
положения
происходит
перераспределение потоков Ф2 и Ф3, в результате
которого образуется выходной сигнал, возрастающий
по мере удаления витка от нейтрального положения.
В датчиках с короткозамкнутым витком возникает
электродинамическая сила, достигающая существенной
величины. Кроме того, в таких датчиках имеются
значительные температурные и фазовые погрешности.150
151.
ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИМагнитная система датчика со вторичной
обмоткой,
перемещающейся
вдоль
магнитопровода, имеет воздушный зазор между
вертикальным
сердечником
2
и
горизонтальным 1. Последний
охватывает
вторичная обмотка 4. Первичная обмотка 3
расположена на среднем сердечнике. Взаимная
индуктивность между обмотками изменяется при
перемещении вторичной обмотки в магнитном
поле, создаваемом первичной. Выходной сигнал
зависит от перемещения.
Магнитная система датчика с обмоткой,
перемещающейся
в
воздушном
зазоре,
состоит из замкнутого магнитопровода 1 с
одним воздушным
зазором и надетой на
средний стержень 4 первичной обмотки. В
воздушном зазоре перемещается вторичная
обмотка, состоящая из двух одинаковых катушек
2 и 3, включенных встречно. При перемещении
вторичной обмотки значения электродвижущих
сил
катушек меняются в зависимости от
положения обмотки, в результате чего
появляется выходной сигнал.
151
152.
ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИРассмотренные трансформаторные датчики с перемещающейся обмоткой
имеют сравнительно высокую чувствительность, малые остаточные сигналы,
практически не имеют электромагнитной силы, действующей на подвижную
обмотку, и не чувствительны к поперечным колебаниям обмотки.
На такой датчик практически не оказывают влияние магнитные поля, так как
воздушный зазор шунтирован магнитопроводом. Кроме того, такие датчики
проще по конструкции и технологии сборки.
В
трансформаторном
магнитоупругом
датчике
изменение
магнитной
проницаемости при воздействии
силы приводит к изменению
магнитного
потока
и
электродвижущей силы.
152
153.
ДАТЧИКИ. ГЕНЕРАТОРНЫЕ ДАТЧИКИИндукционные датчики предназначены для измерения линейных и угловых
скоростей или перемещений. По принципу действия индукционные датчики
можно разделить на датчики со взаимным перемещением обмотки и
магнита и датчики с изменяющейся величиной поля постоянного магнита.
В датчиках первой группы индуктированная электродвижущая сила наводится
благодаря линейным или угловым перемещениям обмотки в зазоре магнитной
системы. При этом в некоторых конструкциях обмотка выполняется
неподвижной, а перемещается магнитная система.
Индукционные датчики скорости в качестве
входной величины имеют механическую скорость, а в
качестве выходной – электрическое напряжение или
электродвижущую силу.
Датчик с взаимным перемещением обмотки и
магнита
представлен на рисунке. Магнит 4
цилиндрической формы является источником потока,
замыкающегося через магнитопровод 1, который
имеет форму полого цилиндра, и воздушный зазор. В
воздушном зазоре вдоль оси
перемещается
сигнальная обмотка 2, выполненная в виде кольца.
Обмотка залита эпоксидным компаундом 3, что
обеспечивает ей прочность и крепление с другими
подвижными деталями.
153
154.
ДАТЧИКИ. ГЕНЕРАТОРНЫЕ ДАТЧИКИВ датчиках второй группы индуктированная электродвижущая сила наводится
в результате изменения магнитного сопротивления цепи при перемещениях
подвижной части.
Датчик
угловой
скорости,
изображенный на рисунке, относится по
принципу действия ко второй группе. Он
содержит постоянный магнит 1, жестко
связанный с магнитопроводом 2, на
стержнях которого расположена обмотка,
состоящая
из
двух
катушек
3,
соединенных последовательно и согласно.
При вращении зубчатого колеса 4
периодически
меняются
полная
проводимость системы и магнитный
поток, пронизывающий
обмотку,
в
результате
чего
в
ней
наводится
электродвижущая сила, пропорциональная
скорости вращения колеса.
Погрешность датчиков первой группы составляет 0,02–0,01 %. У датчиков
второй группы линейность зависит от магнитных характеристик материалов
магнитной цепи. Поскольку эти характеристики обычно нелинейные, датчики
второй группы имеют большую погрешность.
Выходной сигнал датчика может быть включен через выпрямительный
мост на измерительный прибор постоянного тока. Если на выходе обмотки
подключить счетчик импульсов, то по его показаниям можно определить
154
количество прошедших деталей.
155.
ДАТЧИКИ. ГЕНЕРАТОРНЫЕ ДАТЧИКИПьезоэлектрические датчики широко применяются для измерения
вибраций, переменных усилий и в ультразвуковых генераторах.
Принцип
действия
таких
датчиков
основан
на
использовании
пьезоэлектрического эффекта, которым обладают некоторые кристаллы.
При воздействии механической силы на
кристаллы в них происходит разделение
(смещение) зарядов – одна область в кристалле
заряжается положительно, а другая –
отрицательно.
Пьезоэффект наиболее сильно выражен у
кварца, турмалина, сегнетоэлектриков.
Различают
прямой
и
обратный
пьезоэффекты.
Прямой
пьезоэффект
заключается в возникновении электрических
зарядов на гранях кристалла под действием
механических
напряжений.
Обратный
пьезоэффект
состоит
в
изменении
геометрических размеров кристалла под
действием электрического поля. Различают
также
продольный
и
поперечный
пьезоэффекты, в зависимости от направления
действия силы.
155
156.
ДАТЧИКИ. ГЕНЕРАТОРНЫЕ ДАТЧИКИПьезоэлектрические датчики непригодны для
контроля постоянных или медленно изменяющихся
усилий, так как заряд, возникающий на гранях
пьезоэлемента, имеет малую величину. Кроме того,
происходит
его
утечка
через
изоляцию.
Из
пьезокристаллов выполняют датчики динамических
величин. Кварцевые датчики являются наиболее
подходящими для работы в расширенном диапазоне
температур при больших значениях преобразуемых
усилий с точки зрения точности и стабильности
характеристик.
Параллельное
электрическое
соединение
пьезодатчиков, подвергающихся воздействию одной и
той же силы (датчики располагаются столбом – один
над другим), позволяет увеличить их чувствительность.
156
157.
ДАТЧИКИ. ТЕРМОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИТермоэлектрические датчики применяются для измерения температур.
Специальные термоэлектрические датчики используются для измерения
тепловой радиации, температуры нагревателей в термоанемометрах и
вакуумметрах.
Принцип действия термоэлектрических датчиков основан на явлении
термоэлектричества.
Явление
термоэлектричества
заключается
в
возникновении
термоэлектродвижущей силы в цепи (термопаре), составленной из двух
различных проводников или полупроводников (термоэлектродов) А и В (рис.
64, а), соединенных между собой концами (спаями), причем температуры мест
соединения отличны друг от друга.
Величина термоэлектродвижущей силы
зависит
только
от материала
проводников и от температуры спаев и не
зависит от распределения температуры
между спаями. Если один спай (рабочий)
поместить в среду с температурой θ1,
подлежащей измерению, а температуру
θ0
других,
холодных
спаев,
поддерживать постоянной, то
,
независимо от того, каким образом
произведено
соединение
термоэлектродов (пайкой, сваркой и т.д.).
157
158.
ДАТЧИКИ. ТЕРМОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИХарактеристика термопары
элемент
Пельтье
Материалы
для
термоэлектродов
должны
отвечать следующим требованиям: иметь линейную
зависимость термоэлектродвижущей силы
от
температуры, неизменность физических свойств при
эксплуатации, высокую электропроводность, малый
температурный коэффициент сопротивления.
При конструировании термопар
стремятся
сочетать термоэлектроды, один из которых развивает
с платиной положительную, а другой – отрицательную
термоэлектродвижущую
силу.
Положительную
термоэлектродвижущую силу имеют материалы, у
которых в паре с платиной ток в горячем спае течет от
платины (например, свинец, олово, магний), а
отрицательную – материалы, у которых ток течет к
платине (например, никель).
Термопары
из
благородных
материалов
отличаются
стабильностью
характеристик
и
устойчивостью к влиянию внешней среды. Недостаток
их – небольшое значение термоэлектродвижущей
силы.
Для повышения выходной термоэлектродвижущей
силы используются несколько термопар, образующих
термобатарею.
158
159.
ДАТЧИКИ. ДАТЧИКИ ХОЛЛАДатчики Холла используются для
измерения магнитных, электрических и
неэлектрических величин.
Принцип действия таких датчиков
основан на эффекте Холла.
Эффект Холла
возникает
в
пластине с током, помещенной в
магнитное поле, и выражается в
смещении носителей электричества к
краям пластины, между которыми
возникает
электродвижущая
сила
Холла. Обычно длина пластины
значительно превышает ее ширину, а
ширина – толщину пластины.
Датчики Холла с пластинами из металлов
непригодны
для
практического
применения
из-за
малой
электродвижущей силы, соизмеримой с
теми, которые наводятся посторонними
электромагнитными полями (помехи).
Практическое
применение
нашли
датчики Холла с пластинами из
полупроводниковых
материалов.
Материалами для изготовления датчиков
Холла являются германий, кремний,
антимонид индия, арсенид галлия и др.159
160.
ДАТЧИКИ. ДАТЧИКИ ХОЛЛАМонокристаллические датчики изготовляются в виде пластинок (толщина более 0,1
мм),
которые
с
целью
увеличения
механической прочности покрываются
синтетическими смолами с хорошей теплопроводностью.
Пленочные датчики изготовляют распылением материала по поверхности
изолирующей подложки из слюды с последующей термообработкой. Толщина пленок –
0,002–0,05 мм. Для электрической изоляции пленки и ее защиты от механических
повреждений применяют лаковые покрытия.
Датчики Холла позволяют измерять
распределение магнитных полей в
пространстве; проводить измерения в
глубоких отверстиях и малых зазорах;
имеют
линейную
зависимость
выходного
напряжения
от
управляющих величин; имеют малые
размеры;
широкий
частотный
Датчик положения
диапазон для переменных величин
тока или индукции и практически
Датчик вращения
неограниченный срок службы.
Недостатками
являются:
относительно сложная технология;
большой разброс параметров в
пределах одной партии; зависимость
коэффициента Холла от температуры.
160