











 Информатика
Информатика Программное обеспечение
Программное обеспечениеПохожие презентации:




")





Перспективные направления в развитии бортовых шин передачи информации
1. Перспективные направления в развитии бортовых шин передачи информации
Выполнили студенты группы ИВТ-405Д.И. Мухамедов
Р.В. Пронин
Науч. руковод. – канд. техн. наук, доцент П.С. Котенко
2. ARINC-429 – это цифровая однонаправленная радиальная шина данных.
MIL-STD-1553(B) – это детерминированнаянадежная
шина
передачи
данных,
предназначенная
для
подключения
датчиков и контроллеров реального
времени к выч. модулям.
ARINC-429 – это цифровая
однонаправленная
радиальная шина данных.
3.
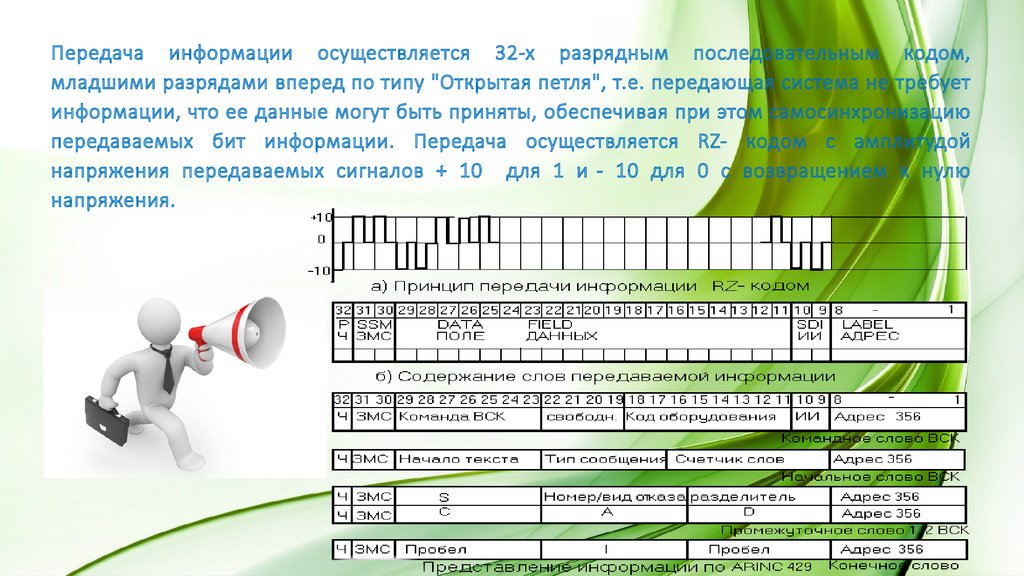
Передача информации осуществляется 32-х разрядным последовательным кодом,младшими разрядами вперед по типу "Открытая петля", т.е. передающая система не требует
информации, что ее данные могут быть приняты, обеспечивая при этом самосинхронизацию
передаваемых бит информации. Передача осуществляется RZ- кодом с амплитудой
напряжения передаваемых сигналов + 10 для 1 и - 10 для 0 с возвращением к нулю
напряжения.
4.
Соединительные проводники —витые пары. ARINC 429 использует
однонаправленный стандарт шины
данных (линии передачи и приёма
физически разделены).
5.
Типичная шина MIL-STD-1553B может состоять из:двух каналов (основного и резервного)
контроллера шины
оконечных устройств
монитора канала
6.
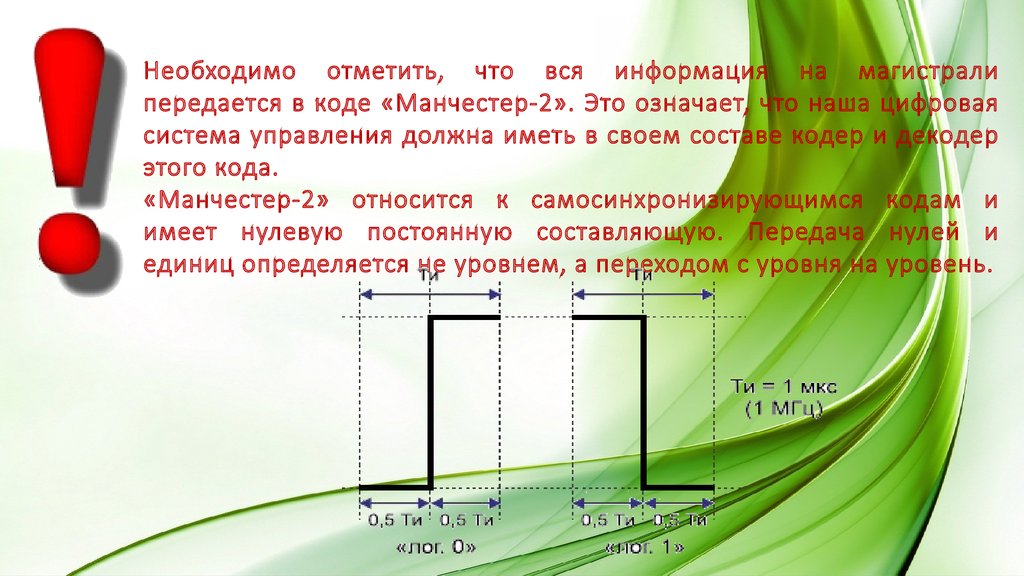
Необходимо отметить, что вся информация на магистралипередается в коде «Манчестер-2». Это означает, что наша цифровая
система управления должна иметь в своем составе кодер и декодер
этого кода.
«Манчестер-2» относится к самосинхронизирующимся кодам и
имеет нулевую постоянную составляющую. Передача нулей и
единиц определяется не уровнем, а переходом с уровня на уровень.
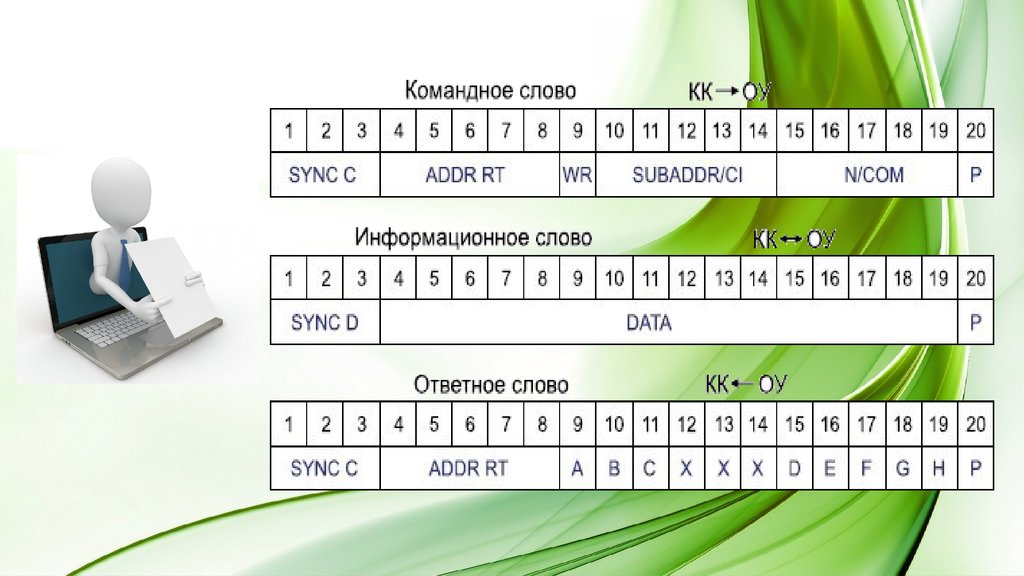
7. Протокол MIL-STD-1553B предусматривает также два вида синхросигнала SYNC C и SYNC D, которые позволяют отличать командные слова от информационных.
Согласно стандарту этого протокола слова могут иметь три различные формата :Командное слово (КС)
Информационное слово (ИС)
Ответное слово (ОС)
8.
9. Основные усовершенствования ARINC-629 по сравнению с ARINC-429
Увеличено количество абонентов шины (с 20 до 120)Шина стала двунаправленной
Увеличена пропускная способность шины (с 100 кбит/с до 2 Мбит/с)
STANAG
3910
является
(оптической)
высокоскоростной шиной данных с частотой
передачи в 20МГц
10. CAN – стандарт промышленной сети, ориентированный прежде всего на объединение в единую сеть различных исполнительных устройств и датчиков
11. Базовый формат кадра данных
12. CAN в армии, на флоте и в авиации
Министерство обороны США интенсивно развивает проектархитектуры сети, которая используется в дистанционно
управляемых движущихся объектах на земле, на море и в
воздухе. В рамках этого проекта разработана спецификация
Common Digital Architecture (CDA) CDA 101, которая использует
CAN протокол.
Протокол CDA 101, называемый «Standard for Communication
Between Network Target Vehicle devices» (Стандарт для связи
сетевых приборов движущегося объекта) может быть
использован в различных типах таких объектах: от маленьких
резиновых лодок до больших судов, от самолетных моделей до
полноразмерных реактивных самолетов и ракет, а также для
любого движущегося транспорта на земле.
13. Почему именно CAN ?
Зрелый стандартАппаратная поддержка протокола
Различная среда передачи
Превосходная обработка ошибок
Хорошая поддержка систем реального времени
Хорошая поддержка систем, управляемых
событиями
Ориентирован на распределенные системы
управления
14. Скорость передачи данных относительно длины кабеля для CAN протокола
1Мбит/с40м
500Кбит/с
100м
125Кбит/с
500м
10Кбит/с
5000м