



")








 анализ – проверка правильности расположения связей")
 анализ – проверка правильности расположения связей")
 анализ – проверка правильности расположения связей")
 анализ – проверка правильности расположения связей")





 Физика
Физика Механика
МеханикаПохожие презентации:










Строительная механика. Кинематический анализ сооружений. Часть I
1.
СТРОИТЕЛЬНАЯ МЕХАНИКА.Часть I
КИНЕМАТИЧЕСКИЙ
АНАЛИЗ
СООРУЖЕНИЙ
2.
Кинематический анализ –это исследование расчётной схемы
сооружения (системы), выполняемое
до начала расчёта с целью определения
кинематического качества системы
(геометрической неизменяемости,
мгновенной изменяемости или
геометрической изменяемости), а в случае
геометрической неизменяемости системы –
также для выявления ее статической
определимости или неопределимости.
3. Основные понятия кинематического анализа
Диск –часть системы (один или несколько
соединённых друг с другом элементов),
форма и размеры которой могут изменяться
только вследствие деформации материала.
С в я з и (механические) –
ограничения на перемещения
(линейные и/или угловые) точек или сечений
элементов системы, а также устройства,
технически реализующие эти ограничения.
Степени свободы–
независимые геометрические параметры,
полностью определяющие положение
всех точек диска или системы в целом
при их возможных перемещениях.
4. Д и с к и
Дискиа)
б)
е)
в)
г)
ж)
и)
д)
з)
к)
– а, б, в, г, д – диски из одного элемента
(а, б, в – стержни с прямолинейной, криволинейной и ломанной в плоскости
или в пространстве осью; г – диск-пластинка;
д – диск-оболочка);
– е, ж, з, и, к – диски из нескольких элементов
(е, ж, з – из однотипных элементов – стержней, плоские (е, ж) и пространственный (з);
и, к – комбинированные пластинчато- и оболочечно-стержневые, пространственные).
5. Классификация связей
– по области расположениядискретные (в отдельных точках или сечениях)
континуальные (распределённые по объему,
поверхности или линии)
– по соединяемым дискам
внутренние
внешние
– по числу ограничиваемых
перемещений
простые (линейные и угловые)
сложные
– по физическим свойствам
жёсткие (недеформируемые)
податливые (деформируемые)
– по кинематическому
признаку
необходимые
избыточные (лишние и ложные)
6. Типы связей плоских систем
2х
Связь 1-го типа
Линейная связь
В
D2
D1
Внутренняя
угловая связь
D1
Угловая связь
Кинематическая
4
5
Реакция связи
– сила R,
направленная
вдоль линии
АВ (оси
связи):
В
А
D2
Внешняя
угловая связь
А
D1
Не препятствует
любым поворотам
дисков и
относительному
линейному
перемещению
точек А и В по
нормали к оси
связи
Устраняет
возможность
относительного
(взаимного)
поворота
соединяемых
дисков:
D1 , D 2 0 .
Допускает любые
относительные
поступательные
перемещения
дисков
2
Статическая
Не допускает
относительного
(взаимного)
линейного
перемещения
точек А и В по
направлению оси
х связи (линии
АВ):
x ( A, B ) = 0.
А
1
Характеристики связи
В
D2
R
А
D1
Реакция связи
– момент M
М
D1
В
А
D2
МА
А
D1
3
4
С
D1
Цилиндрический шарнир
1
Изображение
связи на
расчетной
схеме
3
D2
у
С1
С
D1
х
С2
D2
С
ds
D1
Поступательный шарнир
Наименование
связи
Связь 2-го типа (шарнир)
Тип
связи
Не допускает
относительного
(взаимного)
линейного
перемещения
точек С1 и С2
дисков 1 и 2,
совпадающих с
шарниром С, по
любому
направлению
( С ,С = 0)
1
2
или, в проекциях
на произвольные
оси х и у:
х (С1 ,С2 ) 0,
у (С1 ,С2 ) 0.
Не препятствует
D2
любым взаимным
поворотам дисков
вокруг точки С
Устраняет
у
D1
возможность
А
относительного
(взаимного)
D2 поворота
соединяемых
В
дисков и
х относительного
линейного
D1
у перемещения
А
точек А и В по
D2 направлению
В
D1
у к оси х
у нормали
А
связи (линии АВ):
D1 , D2 0,
В
D1
D1
D2
y ( A, B ) 0.
Допускает
относительное
линейное
перемещение
точек А и В вдоль
оси х связи
5
Реакция связи
– сила RС по
направлению,
требующему
определения
расчетом, или
ее составляющие RСх и RСу
RC1 у
RС
RC1 x
С1
С2
D1 R
C2 x
D2
RC 2 у
RC1 x
RC2 x ;
RC1 y
RC2 y .
Реакции связи
– cила Ry ,
нормальная
к оси связи,
и момент М
D1 МA RAу
А
RBу
В
МB
D2
R Ay RBy ;
M A M B.
7. Типы связей плоских систем (окончание)
Типсвязи
Наименование
связи
Изображение
связи
на расчетной
схеме
Припайка
Связь 3-го типа
D1
D1
D1
Характеристики связи
Кинематическая
D2
D2
D2
Не допускает
никаких –
ни углового,
ни линейных –
взаимных
перемещений
дисков.
Статическая
Реакции связи –
cила R
c составляющими
Rx и R y
и момент М.
Rу
М
D1
Rх
R
Rх
М
D2
Rу
8. Степени свободы
уНесвязанный диск
в пространстве имеет шесть
степеней свободы:
координаты xOD , yOD и zOD
yD
D
zD
OD
D
некоторой точки OD диска –
начала его локальной (собственной) системы координат
и трёх углов D, D и D
между глобальными и
локальными осями.
xD
yOD
O
z OD
xOD
z
D
x
В плоскости диск обладает тремя степенями свободы – это
координаты xOD , yOD и угол D . Точка в пространстве имеет три
степени свободы – xA, yA и zA , а в плоскости – две (xA и yA).
у
у
yD
xD
A
D
yOD
OD
yA
O
O
xOD
x
zA
x
z
xA
9. Системы геометрически неизменяемые, изменяемые и мгновенно изменяемые
Геометрически неизменяемая система (ГНС) –это система, перемещения в которой могут возникать
только вследствие деформации её элементов.
Геометрически изменяемой
называется система (ГИС), в которой возможны
конечные перемещения без деформации элементов.
Мгновенно изменяемой
называется система (МИС), в которой
могут возникать бесконечно малые перемещения
без деформации её элементов.
10. Алгоритм кинематического анализа
1Является ли
система геометрически
неизменяемой (ГНС)?
Да
Да
2
ГНС
статически
определимая ?
Нет
Нет
Нет
Корректировать
расчётную
схему ?
Да
Вывод:
Вывод:
усилия
в системе
могут быть
определены
из уравнений
равновесия
расчёт системы
должен
выполняться
методами,
учитывающими её
статическую
неопределимость
Внесение
изменений в
расчётную схему
Нет
Выполнять
расчёт
МИС ?
3
Нет
Да
Вывод:
Да
Система
изменяемая ?
расчёт системы
должен выполняться
с учетом
изменений её
геометрии от конечных
перемещений
Вывод:
система не
может быть
рассчитана
методами
строительной
механики
К
Н а
н а ч а л о
р а с ч ё т а
11. Этапы кинематического анализа
1) количественный анализ;2) качественный (структурный) анализ.
Количественный анализ–
это исследование расчётной схемы сооружения,
заключающееся в оценке баланса (соотношения)
суммарного числа n степеней свободы дисков системы
до наложения на них внешних и внутренних связей
(т.е. несвязанных дисков) и суммарного числа nc
внешних и внутренних связей системы,
в пересчёте на связи первого типа.
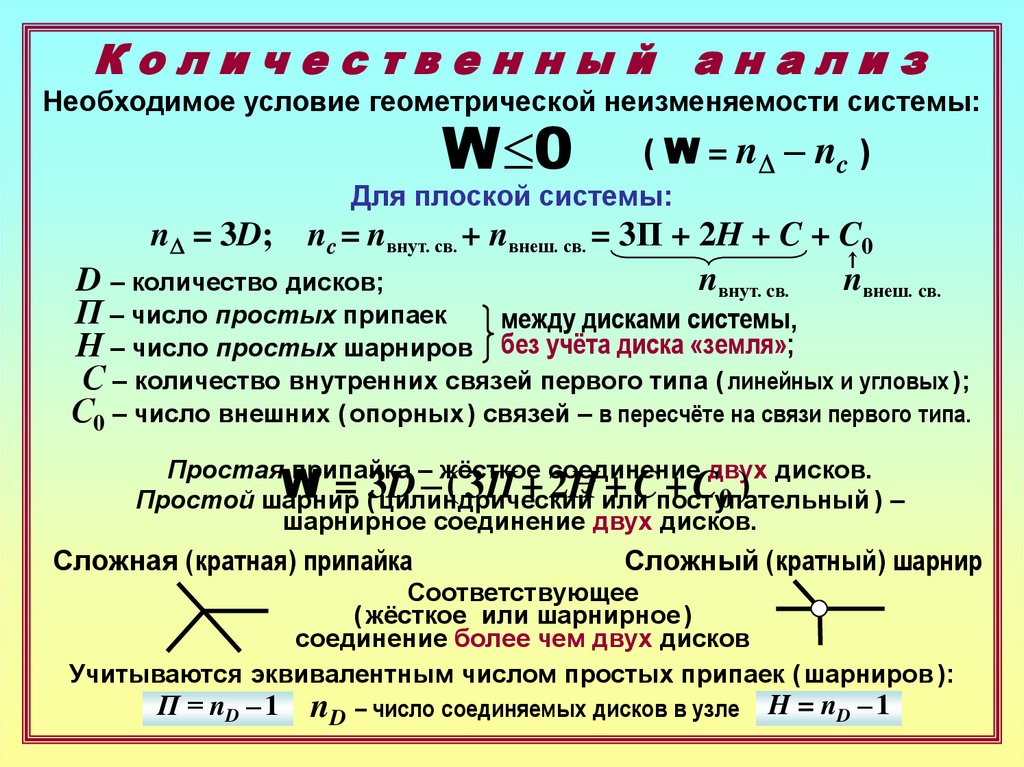
Необходимое условие
геометрической неизменяемости системы:
W 0
( W = n – nc )
12.
Количественный анализНеобходимое условие геометрической неизменяемости системы:
W 0
( W = n – nc )
Для плоской системы:
n = 3D;
nc = nвнут. св. + nвнеш. св. = 3П + 2H + C + C0
nвнут. cв.
nвнеш. cв.
D – количество дисков;
П – число простых припаек
между дисками системы,
Н – число простых шарниров без учёта диска «земля»;
С – количество внутренних связей первого типа ( линейных и угловых );
С0 – число внешних ( опорных ) связей – в пересчёте на связи первого типа.
Простая припайка – жёсткое соединение двух дисков.
W = (3D
– ( 3П + 2H или
+ Cпоступательный
+ C0 )
Простой шарнир
цилиндрический
)–
шарнирное соединение двух дисков.
Сложная (кратная) припайка
Сложный (кратный) шарнир
Соответствующее
( жёсткое или шарнирное )
соединение более чем двух дисков
Учитываются эквивалентным числом простых припаек ( шарниров ):
П = nD – 1 nD – число соединяемых дисков в узле H = nD – 1
13.
Качественный (структурный) анализ –это исследование структуры
расчётной схемы сооружения, заключающееся
в проверке правильности расположения связей,
выявлении возможных дефектов соединения
дисков и завершающееся определением
кинематического качества (природы)
системы (её геометрической
неизменяемости, изменяемости или
мгновенной изменяемости).
14.
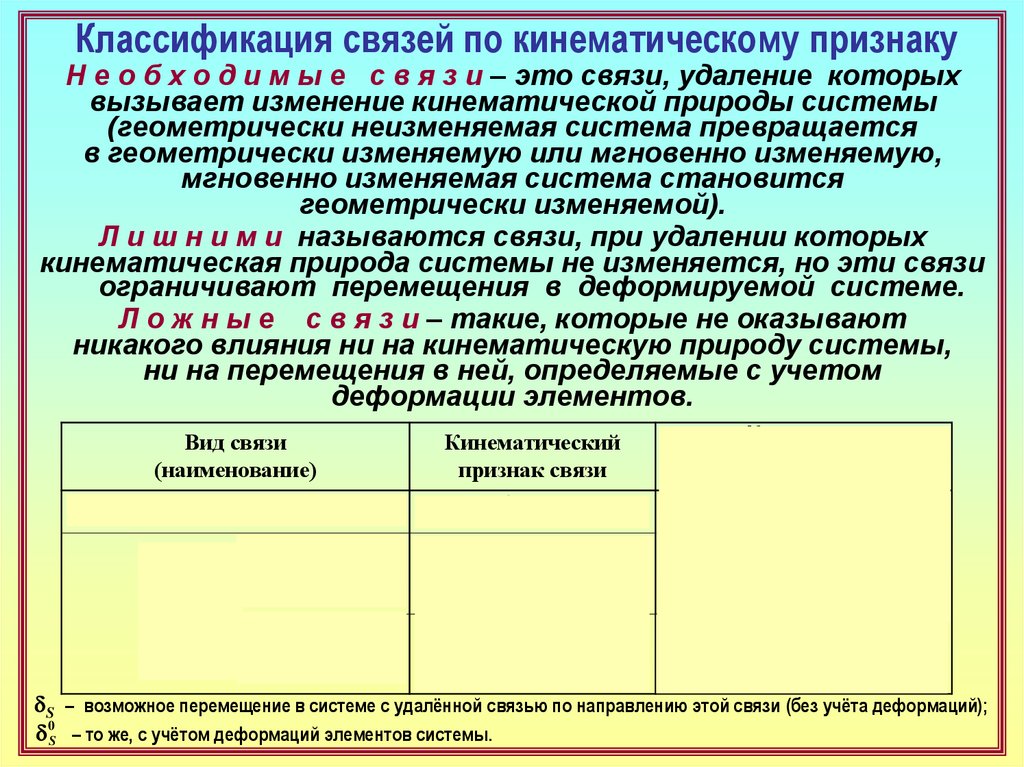
Классификация связей по кинематическому признакуН е о б х о д и м ы е с в я з и – это связи, удаление которых
вызывает изменение кинематической природы системы
(геометрически неизменяемая система превращается
в геометрически изменяемую или мгновенно изменяемую,
мгновенно изменяемая система становится
геометрически изменяемой).
Л и ш н и м и называются связи, при удалении которых
кинематическая природа системы не изменяется, но эти связи
ограничивают перемещения в деформируемой системе.
Л о ж н ы е с в я з и – такие, которые не оказывают
никакого влияния ни на кинематическую природу системы,
ни на перемещения в ней, определяемые с учетом
деформации элементов.
Кинематический
признак связи
Необходимая связь
S 0
Избыточные
связи
Вид связи
(наименование)
Лишняя связь
Ложная связь
S 0,
0 0
S
S 0,
0 0
S
Категория
по кинематическому
признаку
Кинематические связи
Некинематическая связь
S – возможное перемещение в системе с удалённой связью по направлению этой связи (без учёта деформаций);
0S – то же, с учётом деформаций элементов системы.
15. Типовые способы геометрически неизменяемого соединения дисков плоских систем
№ и названиеспособа
1
1.
Соединение точки
и диска
2.
Соединение двух
дисков
Содержание
Схема
способа
соединения
(приема)
2
3
Прикрепление
А
точки к диску
с помощью
двух
D1
линейных
связей
Соединение а)
D2
двух дисков
с помощью D1
трех линейных
связей
б)
D2
Соединение
D
1
двух дисков
D2
с помощью
шарнира
и линейной
в) D1
связи
Требования
к расположению
связей
4
№ и
название
способа
1
Оси связей
не должны
располагаться
на одной
прямой
Оси трех связей
не должны
сходиться в одной
точке или быть
параллельными
Ось линейной
связи не должна
проходить через
центр цилиндрического шарнира
или быть нормальной к оси поступательного шарнира
3.
Соединение трех
дисков
Содержание
способа
(приема)
2
Попарное
соединение
трех дисков
с помощью
трех пар
линейных
связей
Соединение
трех дисков
с помощью
трех
цилиндрических шарниров
Требования
к расположению
связей
4
Схема
соединения
3
а)
D1
В
А
D3
D2
Три точки А, В, С
пересечения
направлений
осей пар связей
не должны лежать
на одной прямой
С
б)
А
D1
В
D2
D3
С
Шарниры А, В и С
не должны лежать
на одной прямой
16. Дополнительные сведения, вытекающие из структурного анализа
Если в процессе синтеза системы на нескольких шагах (более одного)последовательно образуются геометрически неизменяемые системы,
то рассматриваемая система может квалифицироваться как составная,
с выделением в ней главных и второстепенных частей.
Главной называется геометрически неизменяемая часть
составной системы, способная воспринимать любые воздействия
даже при отсутствии всех других частей.
Второстепенная часть составной системы – это часть,
утрачивающая работоспособность вследствие возникновения
её геометрической или мгновенной изменяемости
при удалении других частей (всех или некоторых).
Второстепенные части могут образовывать иерархию по признаку
большей-меньшей второстепенности.
Самой второстепенной частью является та, которая неработоспособна
при отсутствии любой другой части системы.
Практическая рекомендация по последовательности расчёта
статически определимой составной системы:
для определения реакций связей рассматривается равновесие частей,
начиная с самой второстепенной и заканчивая главной
(то есть в порядке, обратном последовательности синтеза).
Замечание: понятия составной системы, главной и второстепенной частей, а также
соображения о последовательности расчёта не относятся непосредственно к кинематическому
анализу ; принципиально важными они являются для статически определимых систем.
17. Пример выполнения кинематического анализа плоской стержневой системы
kp
h
c
e
f
g
1) является ли система
геометрически
неизменяемой?
2) если да, то статически
определима она или
статически неопределима?
d
A
Основные вопросы
кинематического анализа:
B
18. Этап 1. Количественный анализ –
проверка выполнения необходимого,но недостаточного условия
геометрической неизменяемости системы
W 0 (?)
k
D7
Связь
1-го типа
p
h
D5
D6
D2
e
g
Связь
1-го типа
d D
1
A
c
f
D3
W = 3D – (3П+2Н+С+С0)
D=7
( диски D5 и D6 – стержни
с ломаными осями)
П=1
(между дисками D3 и D4
в узле f )
Н=6
(простые – в узлах e,
кратный – в узле h )
D4 С = 2
С0 = 4
B
g, c, f,
( стержни ed и kp )
(шарнирные неподвижные
опоры А и В )
W = 3*7 – (3*1+2*6+2+4) = 21 – 21 = 0 –
необходимое условие геометрической неизменяемости выполняется.
В ы в о д: система может быть геометрически неизменяемой.
19. Этап 2. Качественный (структурный) анализ – проверка правильности расположения связей
Шаг 1: соединение двух дисков (D1 и D2 ) по способу 2б –с помощью шарнира g и линейной связи ed, ось которой не проходит через
центр шарнира. Результат – диск DI : DI = D1 + D2 (по способу 2б).
e
DI
D2
g
d D
1
Вариант:
соединение трёх дисков
(D1 ,D2 и диск ed) по способу 3б –
с помощью трёх
цилиндрических шарниров
в точках e, d и g, не лежащих
на одной прямой.
Результат – диск DI :
DI = D1 + D2 + ed
(по способу 3б).
20. Этап 2. Качественный (структурный) анализ – проверка правильности расположения связей
Шаг 2: соединение трёх дисков ( DI , cfB и диск «Земля» ) по способу 3б –с помощью трёх цилиндрических шарниров в точках A, c и B,
не лежащих на одной прямой.
Результат – диск DII :
DII = DI + cfB + «Земля»
(по способу 3б) .
D2
e
DI
DII
c
f
g
d D
1
A
Земля
B
Примечание:
поскольку в диск DII
входит диск «Земля»,
то DII является
геометрически
неизменяемой
системой:
DII ГНС1
21. Этап 2. Качественный (структурный) анализ – проверка правильности расположения связей
Шаг 3: соединение трёх дисков ( DII , D5 и D6 ) по способу 3б –с помощью трёх цилиндрических шарниров в точках e, h и f,
не лежащих на одной прямой.
Результат – диск DIII :
DIII = DII + D5 + D6
h
(по способу 3б) .
DIII
D5
D6
Примечание:
D2
c
поскольку в диск DIII
e
f
g
входит диск «Земля»,
то DIII является
DI
d D
геометрически
1
DII
неизменяемой
B
системой:
A
Земля
DIII ГНС2
22. Этап 2. Качественный (структурный) анализ – проверка правильности расположения связей
Шаг 4: соединение двух дисков ( DIII и D7 ) по способу 2б – с помощьюцилиндрического шарнира в точке h и линейной связи ed, ось которой
не проходит через центр шарнира.
k
Результат – диск DIV :
D7
DIV
DIV = DIII + D7 (по способу 2б) .
p
h
Варианты:
DIII
а) соединение трёх дисков
D5
D6
(DIII ,hk и kp) по способу 3б –
с помощью трёх
D
c
2
e
f
цилиндрических шарниров
g
h, k и p, не лежащих
на одной прямой;
d D
б) присоединение точки k
1
DII
к диску DIII по способу 1 –
с помощью двух связей
B
A
Земля
1-го типа (hk и kp).
Примечание:
поскольку в диск DIV входит диск «Земля», то DIV
является геометрически неизменяемой системой: DIV ГНС
DI
23. Р е з ю м е :
Резюме:а) в системе имеется достаточное число связей,
избыточных связей нет (W = 0);
б) структура системы правильная – отсутствуют дефекты
расположения связей.
k
h
p
Вывод:
B
система
геометрически
неизменяемая
и
статически
определимая.
c
e
f
g
d
A
24. Дополнительные сведения, вытекающие из структурного анализа
Второстепенныечасти
Поскольку в процессе синтеза системы на нескольких шагах (более одного)
последовательно образуются геометрически неизменяемые системы
(ГНС1 , ГНС2 , ГНС), то рассматриваемая система может
квалифицироваться как составная, с выделением в ней
главной и второстепенных частей:
k
ВЧ2
Практическая
рекомендация
p
h
по последовательности
расчёта:
ВЧ1
Главная
часть
(ГЧ)
c
e
f
g
d
для определения реакций
связей рассматривается
равновесие частей
системы, начиная
с самой второстепенной
и заканчивая главной:
ВЧ2
A
B
ВЧ1
ГЧ
(то есть в порядке,
обратном
последовательности
синтеза).
25.
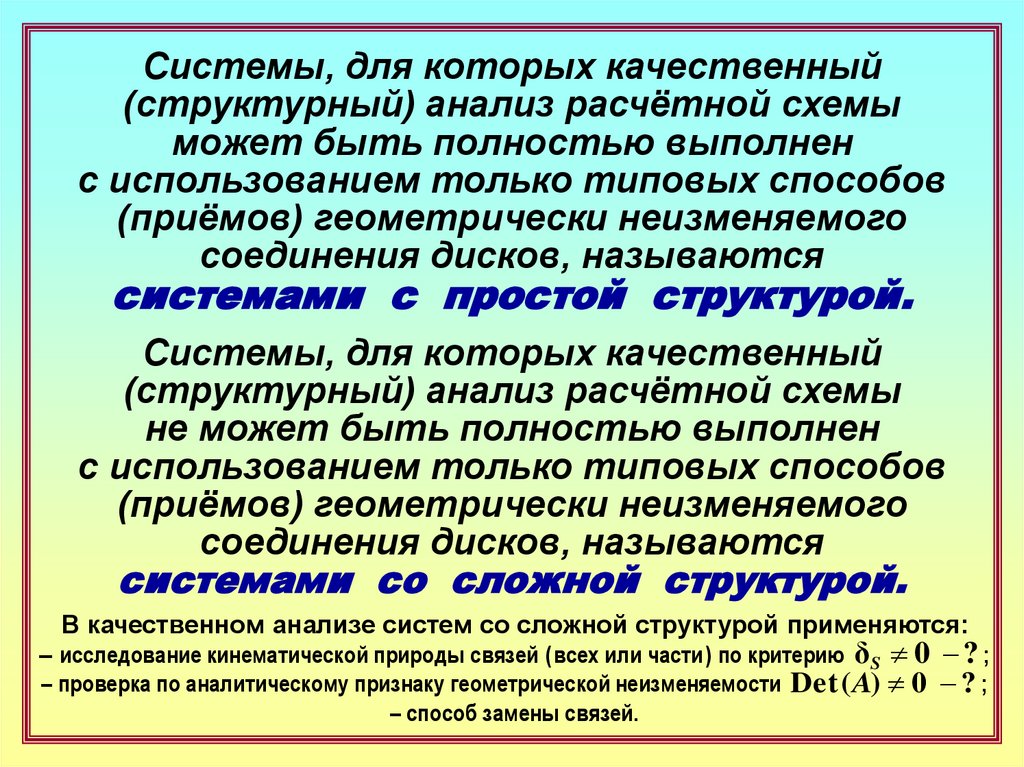
Системы, для которых качественный(структурный) анализ расчётной схемы
может быть полностью выполнен
с использованием только типовых способов
(приёмов) геометрически неизменяемого
соединения дисков, называются
системами с простой структурой.
Системы, для которых качественный
(структурный) анализ расчётной схемы
не может быть полностью выполнен
с использованием только типовых способов
(приёмов) геометрически неизменяемого
соединения дисков, называются
системами со сложной структурой.
В качественном анализе систем со сложной структурой применяются:
– исследование кинематической природы связей ( всех или части ) по критерию δS 0
– проверка по аналитическому признаку геометрической неизменяемости Det ( A) 0
– способ замены связей.
?;
?;
26. Пример кинематического анализа системы со сложной структурой
Этап 1. Количественный анализD3
D4
D5
Связь
Связь
D1
D2
D = 5; П = 0; H = 3; C = 2; C0 = 7
W = 3*D – (3*П + 2*H + C + C0 ) =
= 3*5 – ( 3*0 + 2*3 + 2 + 7 ) = 0 –
необходимое условие геометрической неизменяемости выполняется;
система может быть геометрически неизменяемой
27. Пример кинематического анализа системы со сложной структурой
Этап 2. Качественный (структурный) анализА
А
Направление
удалённой
связи
В
В
Выполнить синтез системы с помощью типовых способов
геометрическиВнеизменяемого
соединения
дисков не удаётся,
результате удаления
связи
поэтому исследуется
связей системы:
система кинематическая
превращается природа
в механизм,
удаляется
стержень
АВ, возможное
который может рассматриваться
которому
задаётся
перемещение
как линейная связь 1-го типа
28. Пример кинематического анализа системы со сложной структурой
Этап 2. КачественныйS,l
А
Можно
использовать
(структурный)
анализ
план
перемещений
S,r
узлов:
Направление
удаленной
связи
С
К
В
S
0
Определяется перемещение S по направлению удалённой связи –
А
В
С,
K
в данном случае проекция
S = S,lвзаимного
+ S,r = 0(относительного)
линейного перемещения точек А и В по направлению
S,l S,r
Вывод: удалённая
связь –линейной
необходимая,
оси удалённой
связи
следовательно, структура системы правильная,
система геометрически неизменяемая.
29.
Контрольныевопросы
( в скобках даны номера слайдов, на которых можно найти ответы на вопросы;
для перехода к слайду с ответом можно сделать щелчок мышью по номеру в скобках*);
для возврата к контрольным вопросам сделать щелчок правой кнопкой мыши
и выбрать «Перейти к слайду 29» )
1. Что такое кинематический анализ? Его назначение? ( 2 )
2. Назовите основные понятия кинематического анализа. ( 3 )
3. Дайте определение диска. ( 3 ) Что может быть диском? ( 4 )
4. Что такое диск «земля» и какими свойствами он наделяется? ( см. [1] )
5. Дайте определение связи. ( 3 ) По каким признакам и как классифицируются связи? ( 5 )
6. Перечислите типы связей плоских систем и для каждого из них
дайте кинематическую и статическую характеристики. ( 6 )
7. Каким комбинациям простых связей кинематически эквивалентны
сложные связи разных типов? ( см. [1] )
8. Дайте разные варианты изображения связей плоских систем. ( 6 )
9. Какова роль гипотезы отвердения материала в кинематическом анализе? ( см. [1] )
10. Что такое степени свободы ( 3 ) и какие величины могут выступать в качестве
степеней свободы? ( 8 )
11. Сколько степеней свободы имеет жёсткий диск в пространстве и в плоскости?
А точка? ( 8 )
12. Ответы на какие главные вопросы даются в ходе кинематического анализа? ( 17 )
13. Какие системы называются геометрически неизменяемыми?
Геометрически изменяемыми? Мгновенно изменяемыми? ( 9 )
14. Назовите этапы кинематического анализа. ( 11 )
15. Дайте определение количественного анализа. ( 11 )
16. Что означают символы n и nc ( 11 ) и как вычисляются обозначаемые ими
величины? ( 12 )
17. Какие припайки (шарниры) называются сложными ( кратными )?
Как определяется число эквивалентных им простых припаек ( шарниров )? ( 12 )
_______________________________________________
*)
Только в режиме «Показ слайдов»
[1] Себешев В.Г. Кинематический анализ сооружений : Учеб. пособие /
Новосибирск: НГАСУ (Сибстрин), 2006. – 58 с.
30.
Контрольныевопросы
( в скобках даны номера слайдов, на которых можно найти ответы на вопросы;
для перехода к слайду с ответом можно сделать щелчок мышью по номеру в скобках*);
для возврата к контрольным вопросам сделать щелчок правой кнопкой мыши
и выбрать «Перейти к слайду 30» )
18. Какой вид имеет необходимое условие геометрической неизменяемости системы? ( 11 )
19. Почему оно является недостаточным? ( см. [1] )
20. Что такое W ? Как вычисляется эта характеристика? ( 12 )
21. Какой вывод делается по результатам кинематического анализа, если получается
W > 0 ? ( см. [1] ) А если необходимое условие неизменяемости выполняется? ( 18 )
22. Что такое качественный ( структурный ) анализ? ( 13 )
23. Как классифицируются простые связи по кинематическому признаку? ( 14 )
24. Дайте определения необходимой, лишней и ложной связей. ( 14 )
25. Какие геометрические параметры используются в описании кинематических признаков
разных связей? ( 14 )
26. Что общего у необходимых и лишних связей? У лишних и ложных связей?
В чём различия между ними? ( 14 ) Что нужно делать с обнаруженными ложными
связями? ( см. [1] )
27. Как выявляются лишние связи? ( см. [1] )
28. Перечислите типовые способы геометрически неизменяемого соединения дисков,
объясните смысл каждого из них с указанием требований к расположению связей. ( 15 )
29. Какова последовательность действий при выполнении структурного анализа
с применением типовых способов соединения дисков? ( см. [1] )
31. Какие выводы делаются по результатам структурного анализа системы? ( 23 )
32. Что такое система с простой структурой? ( 25 )
33. Что такое система со сложной структурой? Каковы возможные пути выполнения
структурного анализа таких систем? ( 25 )
34. Какие части составной системы называются главными,
а какие – второстепенными? ( 16 )
____________________________________________________________
*)
Только в режиме «Показ слайдов»
[1] Себешев В.Г. Кинематический анализ сооружений : Учеб. пособие /
Новосибирск: НГАСУ (Сибстрин), 2006. – 58 с.