 Физика
ФизикаПохожие презентации:
")




")

")
")

Элементы специальной теории относительности. Тема 6
1.
Тема 6Элементы специальной теории
относительности
1
2.
План лекции1. ЭЛЕМЕНТЫ СПЕЦИАЛЬНОЙ ТЕОРИИ ОТНОСИТЕЛЬНОСТИ.
Преобразования Галилея. Механический принцип
относительности.
2. Постулаты специальной теории относительности
3. Преобразования Лоренца.
4. Следствия из преобразований Лоренца.
5. Основной закон релятивистской динамики материальной
точки. Закон взаимосвязи массы и энергии.
2
3.
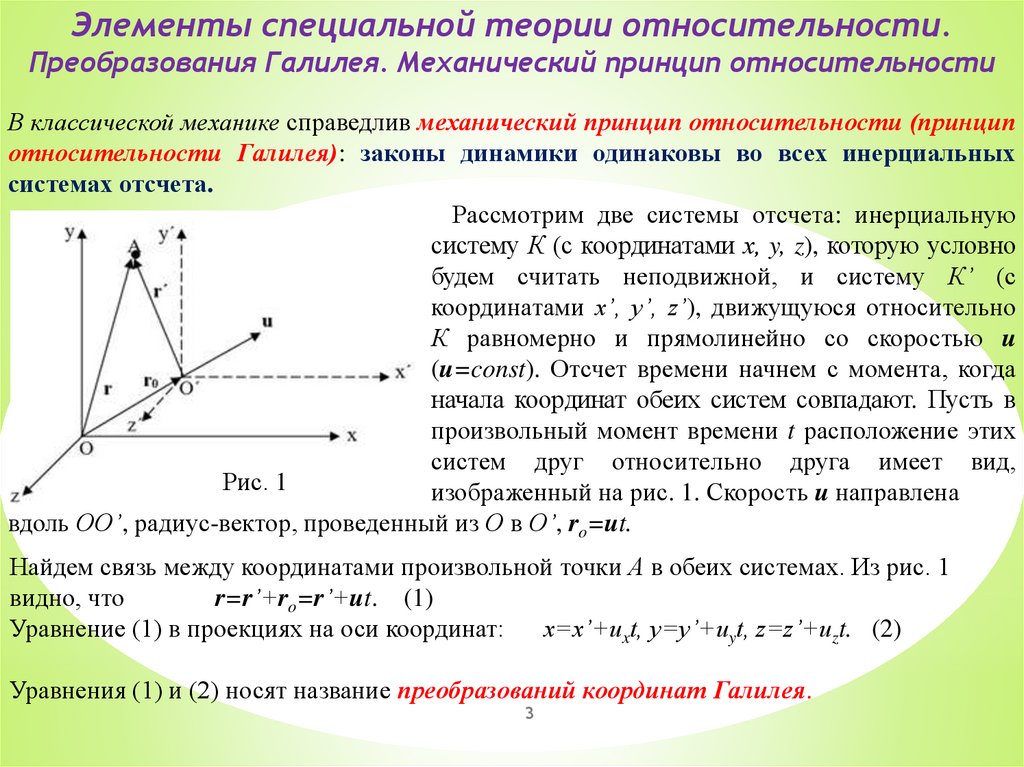
Элементы специальной теории относительности.Преобразования Галилея. Механический принцип относительности
В классической механике справедлив механический принцип относительности (принцип
относительности Галилея): законы динамики одинаковы во всех инерциальных
системах отсчета.
Рассмотрим две системы отсчета: инерциальную
систему К (с координатами х, y, z), которую условно
будем считать неподвижной, и систему К’ (с
координатами х’, y’, z’), движущуюся относительно
К равномерно и прямолинейно со скоростью u
(u=const). Отсчет времени начнем с момента, когда
начала координат обеих систем совпадают. Пусть в
произвольный момент времени t расположение этих
систем друг относительно друга имеет вид,
Рис. 1
изображенный на рис. 1. Скорость u направлена
вдоль ОО’, радиус-вектор, проведенный из О в О’, ro=ut.
Найдем связь между координатами произвольной точки А в обеих системах. Из рис. 1
видно, что
r=r’+ro=r’+ut. (1)
Уравнение (1) в проекциях на оси координат:
x=x’+uxt, y=y’+uyt, z=z’+uzt. (2)
Уравнения (1) и (2) носят название преобразований координат Галилея.
3
4.
Постулаты специальной теории относительностиА. Эйнштейн заложил основы специальной теории относительности. Эта теория
представляет собой современную физическую теорию пространства и времени, в которой,
как и в классической ньютоновской механике, предполагается, что время однородно, а
пространство однородно и изотропно. Специальная теория относительности часто
называется также релятивистской теорией, а явления, описываемые этой теорией, релятивистскими эффектами.
В основе специальной теории относительности лежат постулаты Эйнштейна,
сформулированные им в 1905 г.
I.
Принцип
относительности:
никакие
опыты
(механические,
электрические, оптические), проведенные внутри данной инерциальной
системы отсчета, не дают возможности обнаружить, покоится ли эта система
или движется равномерно и прямолинейно; все законы природы инвариантны
по отношению к переходу от одной инерциальной системы отсчета к другой.
II. Принцип инвариантности скорости света: скорость света в вакууме не
зависит от скорости движения источника света или наблюдателя и одинакова
во всех инерциальных системах отсчета.
4
5.
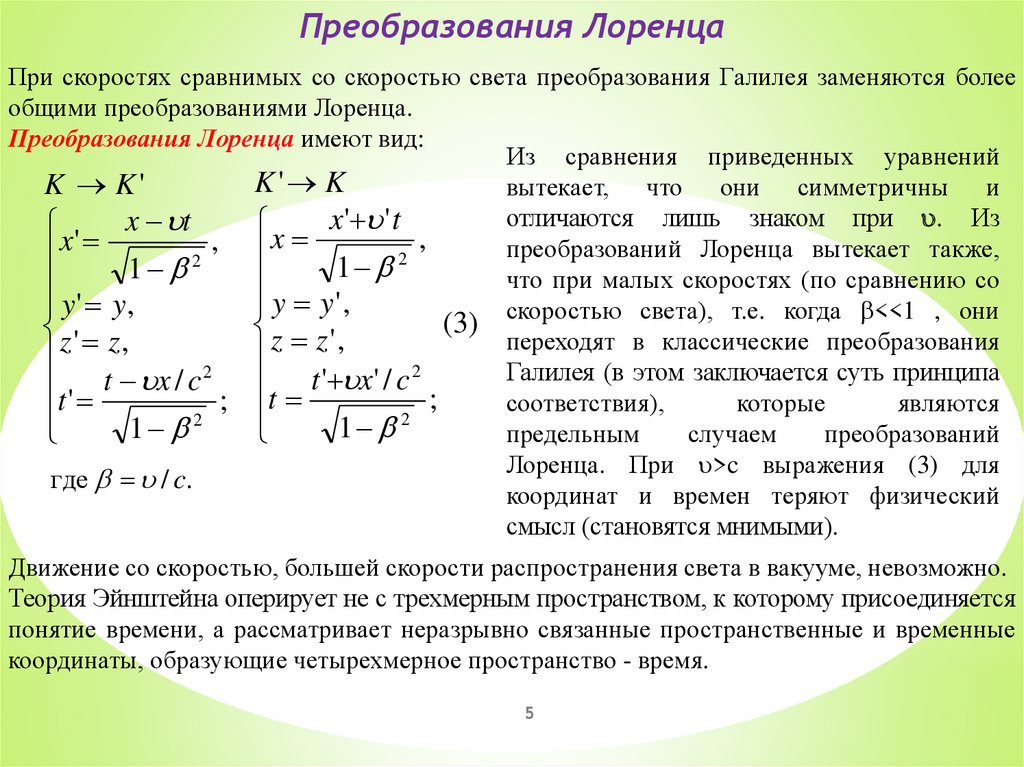
Преобразования ЛоренцаПри скоростях сравнимых со скоростью света преобразования Галилея заменяются более
общими преобразованиями Лоренца.
Преобразования Лоренца имеют вид:
Из сравнения приведенных уравнений
K ' K
K K'
вытекает, что они симметричны и
отличаются лишь знаком при . Из
x' x t , x x' ' t ,
преобразований Лоренца вытекает также,
2
2
1
1
что при малых скоростях (по сравнению со
y y' ,
y ' y,
(3) скоростью света), т.е. когда <<1 , они
z z' ,
z ' z,
переходят в классические преобразования
2
2
Галилея (в этом заключается суть принципа
t ' t x / c ; t t ' x' / c ;
соответствия),
которые
являются
2
2
1
1
предельным
случаем
преобразований
Лоренца. При >c выражения (3) для
где / c.
координат и времен теряют физический
смысл (становятся мнимыми).
Движение со скоростью, большей скорости распространения света в вакууме, невозможно.
Теория Эйнштейна оперирует не с трехмерным пространством, к которому присоединяется
понятие времени, а рассматривает неразрывно связанные пространственные и временные
координаты, образующие четырехмерное пространство - время.
5
6.
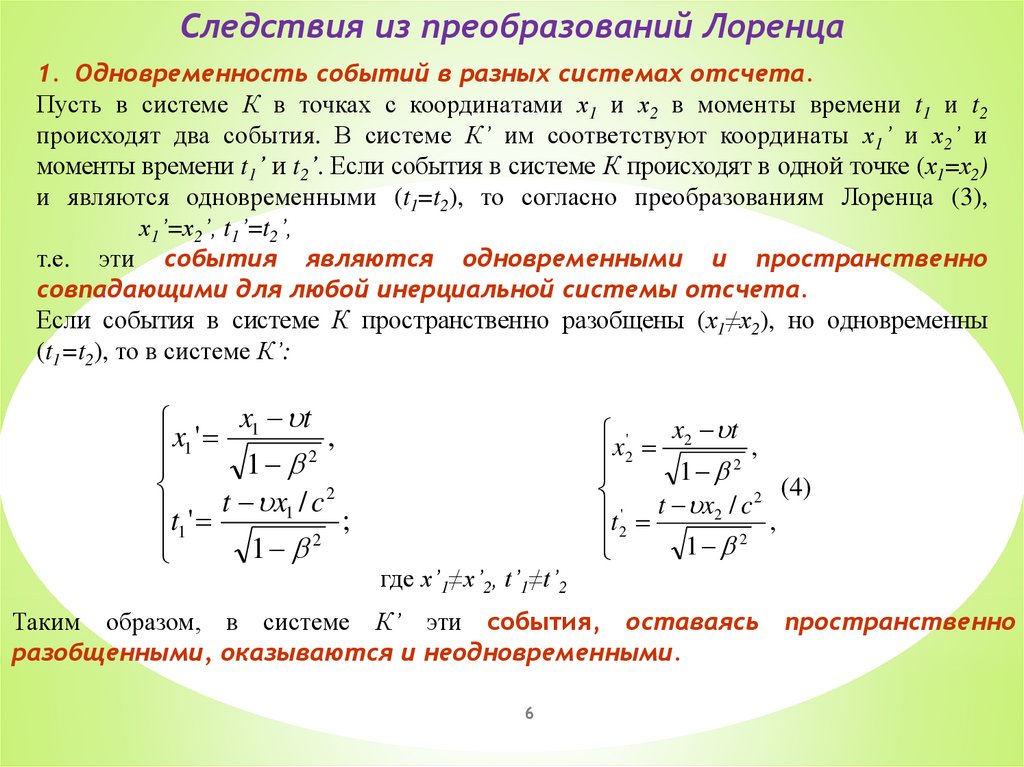
Следствия из преобразований Лоренца1. Одновременность событий в разных системах отсчета.
Пусть в системе К в точках с координатами х1 и х2 в моменты времени t1 и t2
происходят два события. В системе К’ им соответствуют координаты х1’ и х2’ и
моменты времени t1’ и t2’. Если события в системе К происходят в одной точке (х1=х2)
и являются одновременными (t1=t2), то согласно преобразованиям Лоренца (3),
х1’=х2’, t1’=t2’,
т.е. эти события являются одновременными и пространственно
совпадающими для любой инерциальной системы отсчета.
Если события в системе К пространственно разобщены (х1≠х2), но одновременны
(t1=t2), то в системе К’:
x ' x1 t ,
1
1 2
2
t
x
/
c
1
t1 '
;
2
1
где х’1≠х’2, t’1≠t’2
x ' x 2 t ,
2
1 2
2 (4)
t
x
/
c
2
t 2'
,
2
1
Таким образом, в системе К’ эти события, оставаясь пространственно
разобщенными, оказываются и неодновременными.
6
7.
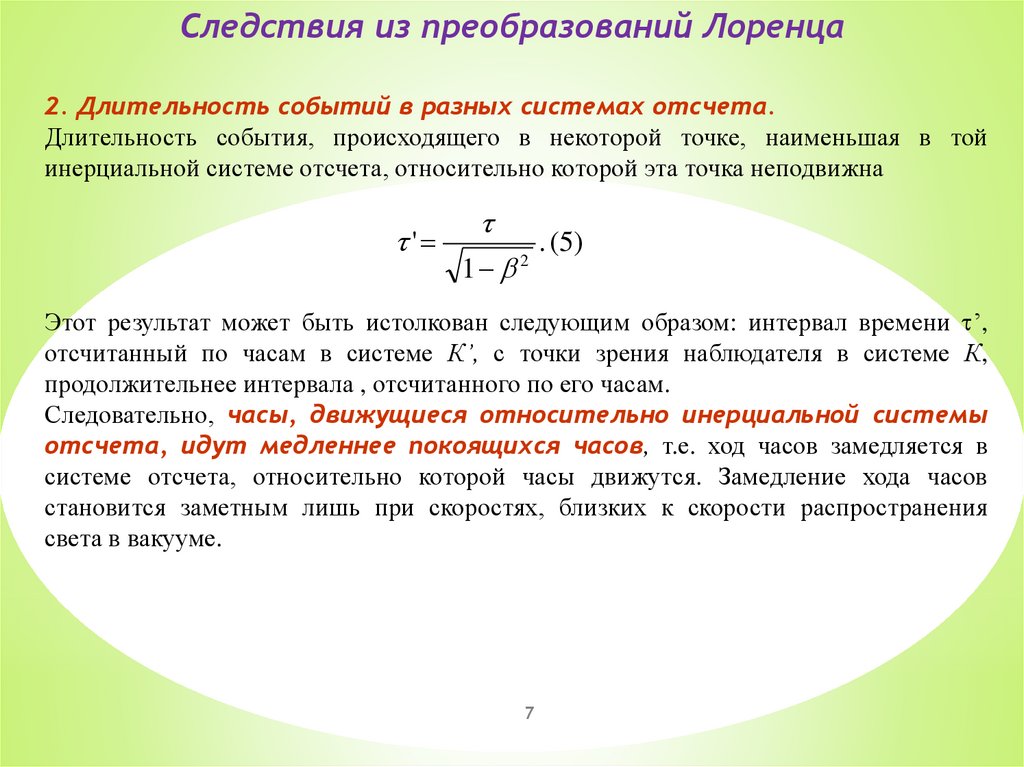
Следствия из преобразований Лоренца2. Длительность событий в разных системах отсчета.
Длительность события, происходящего в некоторой точке, наименьшая в той
инерциальной системе отсчета, относительно которой эта точка неподвижна
'
1
2
. (5)
Этот результат может быть истолкован следующим образом: интервал времени ’,
отсчитанный по часам в системе К’, с точки зрения наблюдателя в системе К,
продолжительнее интервала , отсчитанного по его часам.
Следовательно, часы, движущиеся относительно инерциальной системы
отсчета, идут медленнее покоящихся часов, т.е. ход часов замедляется в
системе отсчета, относительно которой часы движутся. Замедление хода часов
становится заметным лишь при скоростях, близких к скорости распространения
света в вакууме.
7
8.
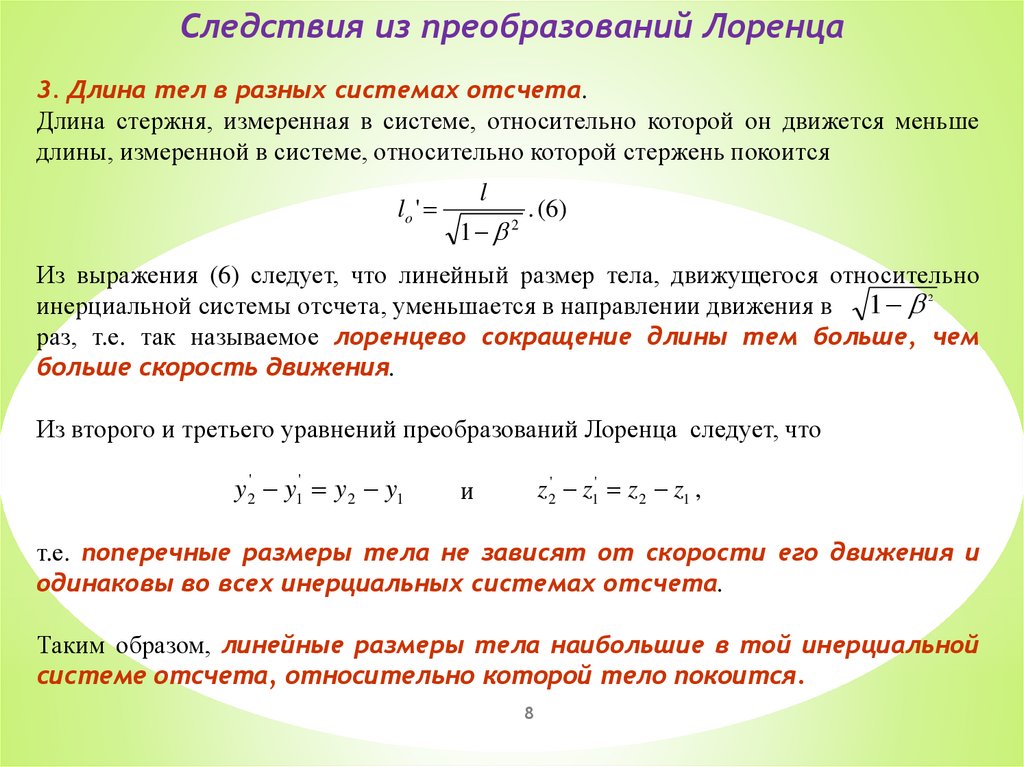
Следствия из преобразований Лоренца3. Длина тел в разных системах отсчета.
Длина стержня, измеренная в системе, относительно которой он движется меньше
длины, измеренной в системе, относительно которой стержень покоится
lo '
l
1
2
. (6)
Из выражения (6) следует, что линейный размер тела, движущегося относительно
инерциальной системы отсчета, уменьшается в направлении движения в 1
раз, т.е. так называемое лоренцево сокращение длины тем больше, чем
больше скорость движения.
2
Из второго и третьего уравнений преобразований Лоренца следует, что
y2' y1' y2 y1
z 2' z1' z 2 z1 ,
и
т.е. поперечные размеры тела не зависят от скорости его движения и
одинаковы во всех инерциальных системах отсчета.
Таким образом, линейные размеры тела наибольшие в той инерциальной
системе отсчета, относительно которой тело покоится.
8
9.
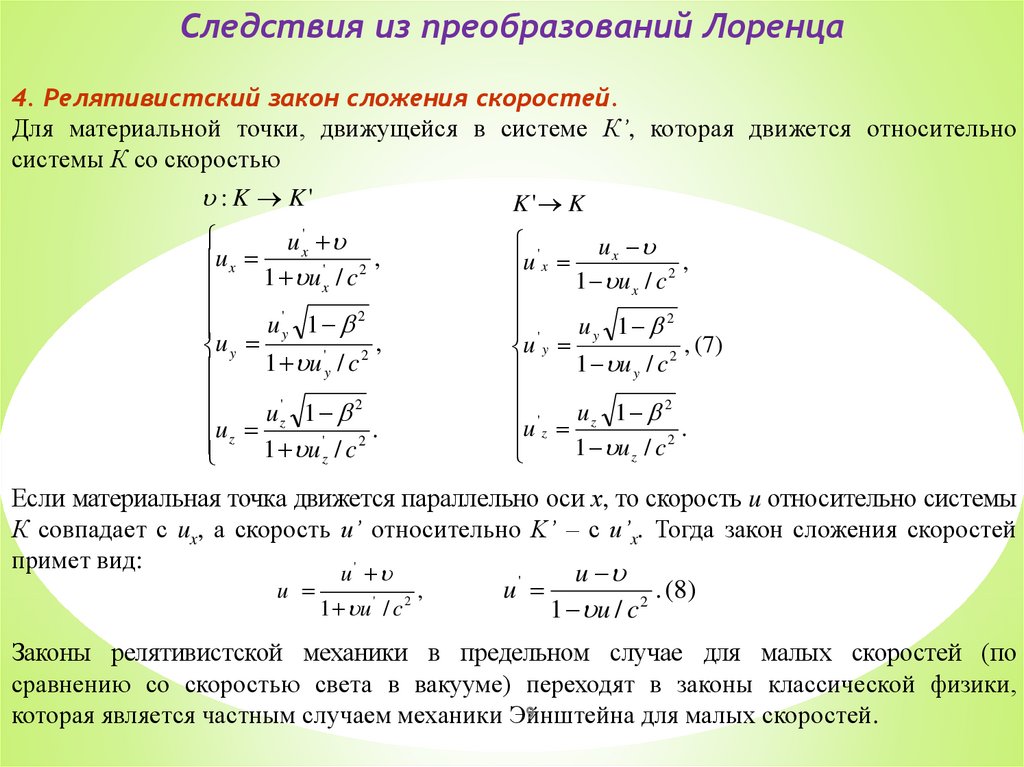
Следствия из преобразований Лоренца4. Релятивистский закон сложения скоростей.
Для материальной точки, движущейся в системе К’, которая движется относительно
системы К со скоростью
: K K'
K ' K
u x'
,
u x
'
2
1 u x / c
u 'y 1 2
,
u y
'
2
1 u y / c
'
2
u u z 1 .
z 1 u z' / c 2
'
ux
u
,
x
2
1
u
/
c
x
uy 1 2
'
, (7)
u y
2
1
u
/
c
y
2
u
1
'
z
u z
.
2
1 u z / c
Если материальная точка движется параллельно оси х, то скорость u относительно системы
К совпадает с ux, а скорость u’ относительно K’ – с u’x. Тогда закон сложения скоростей
примет вид:
u'
u
'
u
. (8)
u
,
'
2
2
1 u / c
1 u / c
Законы релятивистской механики в предельном случае для малых скоростей (по
сравнению со скоростью света в вакууме) переходят в законы классической физики,
9
которая является частным случаем механики Эйнштейна
для малых скоростей.
10.
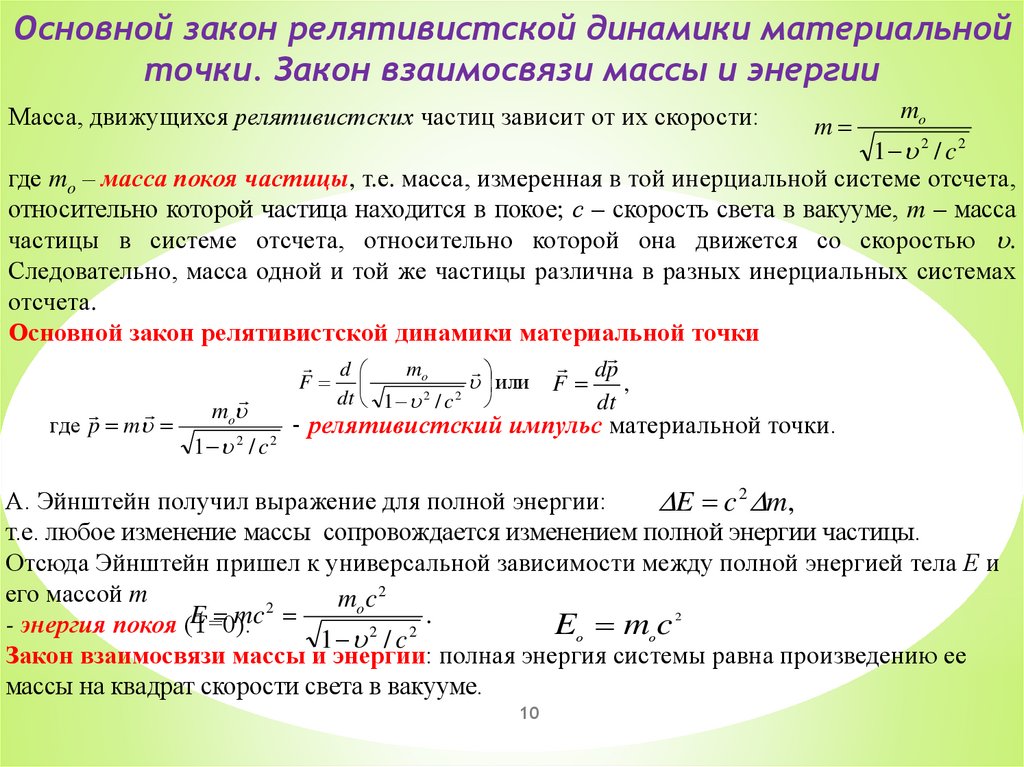
Основной закон релятивистской динамики материальнойточки. Закон взаимосвязи массы и энергии
Масса, движущихся релятивистских частиц зависит от их скорости:
m
mo
1 2 / c 2
где mo – масса покоя частицы, т.е. масса, измеренная в той инерциальной системе отсчета,
относительно которой частица находится в покое; с – скорость света в вакууме, m – масса
частицы в системе отсчета, относительно которой она движется со скоростью .
Следовательно, масса одной и той же частицы различна в разных инерциальных системах
отсчета.
Основной закон релятивистской динамики материальной точки
где p m
mo
1 2 / c2
d
mo
F
или
dt 1 2 / c 2
dp
F
,
dt
- релятивистский импульс материальной точки.
А. Эйнштейн получил выражение для полной энергии:
E c 2 m,
т.е. любое изменение массы сопровождается изменением полной энергии частицы.
Отсюда Эйнштейн пришел к универсальной зависимости между полной энергией тела Е и
его массой m
mo c 2
2
2
E mc
.
- энергия покоя (Т=0).
E
m
c
2
2
о
о
1 / c
Закон взаимосвязи массы и энергии: полная энергия системы равна произведению ее
массы на квадрат скорости света в вакууме.
10