
")














")

 Электроника
ЭлектроникаПохожие презентации:










Машины переменного тока
1.
ЭЛЕКТРИЧЕСКИЕМАШИНЫ
ПЕРЕМЕННОГО
ТОКА
1
2. ПЛАН
1. Общие сведения и конструкция асинхронногодвигателя (АД).
2. Принцип образования вращающегося магнитного
поля машины.
3. Принцип действия АД.
4. Пуск, регулирование частоты вращения и
торможение АД.
5. Вращающий момент АД.
6. Механическая и рабочие характеристики АД.
7. Энергетическая диаграмма асинхронного двигателя.
Потери. Коэффициент полезного действия АД.
2
3. 1. Общие сведения и конструкция асинхронного двигателя (АД)
34. Достоинства асинхронного двигателя
конструктивная простота изготовления (посравнению с машинами постоянного тока)
2. низкая стоимость
3. высокая эксплуатационная надежность
4. простота обслуживания
5. высокие энергетические показатели, (имеют
относительно высокий КПД, например, при
мощности более 1 кВТ – η = 0,7-0,95 и только в
микродвигателях η снижается до 0,2- 0,65
1.
4
5. Недостатки асинхронного двигателя
1.2.
Потребление из сети реактивного тока, необходимого для
создания магнитного потока, в результате чего
асинхронные двигатели работают с коэффициентом
мощности меньше 1.
Худшие
регулировочные
свойства.
Трудность
осуществления плавного регулирования частоты вращения
в широких пределах.
3. Худшие пусковые свойства. Сравнительно небольшой
пусковой момент, а также большие пусковые токи, в 5-7
раз превышающие номинальные
5
6.
Трехфазный АД с фазным роторомАД с короткозамкнутым ротором
Асинхронные двигатели состоят из двух частей:
неподвижной части — статора и вращающейся части —
ротора вращающегося в подшипниках, укрепленных в
двух щитах двигателя. Статор и ротор разделены
воздушным зазором.
6
7.
78.
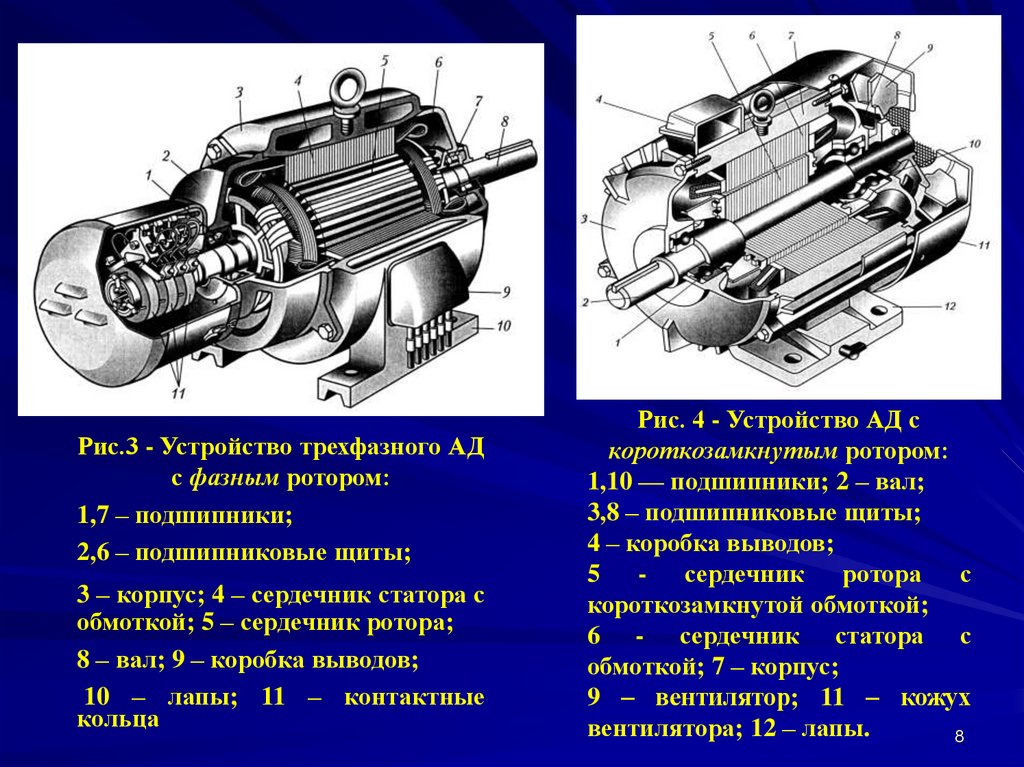
Рис.3 - Устройство трехфазного АДс фазным ротором:
1,7 – подшипники;
2,6 – подшипниковые щиты;
3 – корпус; 4 – сердечник статора с
обмоткой; 5 – сердечник ротора;
8 – вал; 9 – коробка выводов;
10 – лапы; 11 – контактные
кольца
Рис. 4 - Устройство АД с
короткозамкнутым ротором:
1,10 — подшипники; 2 – вал;
3,8 – подшипниковые щиты;
4 – коробка выводов;
5 - сердечник ротора с
короткозамкнутой обмоткой;
6 - сердечник статора с
обмоткой; 7 – корпус;
9 – вентилятор; 11 – кожух
вентилятора; 12 – лапы.
8
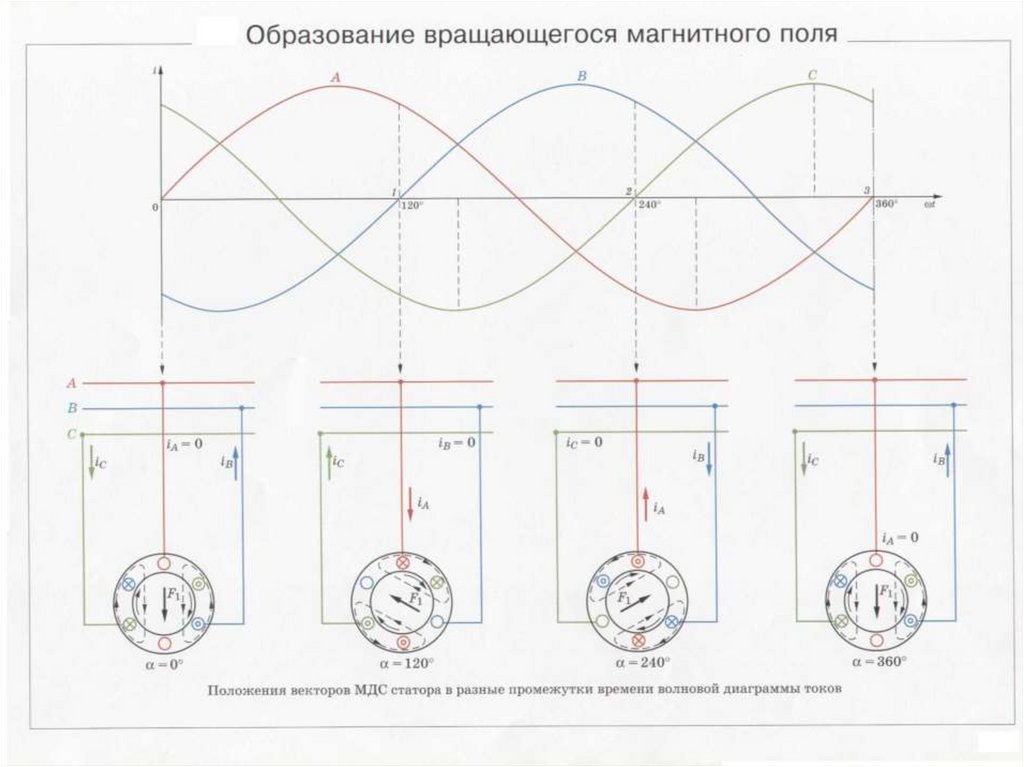
9. 2. Принцип образования вращающегося магнитного поля машины
910.
1011.
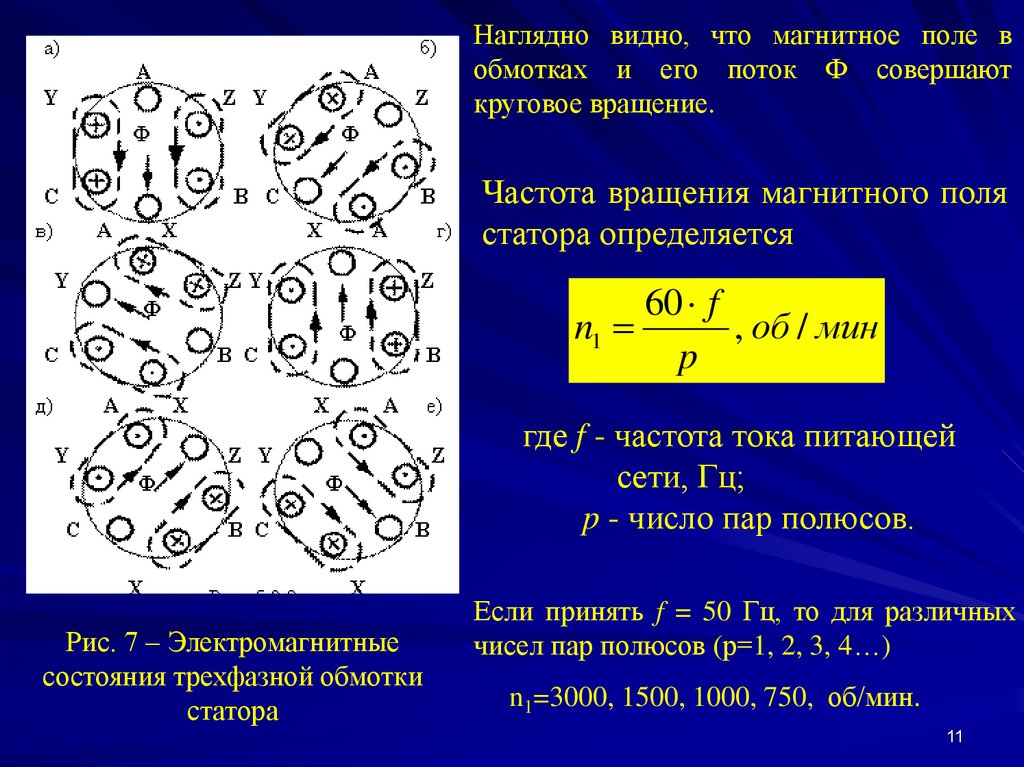
Наглядно видно, что магнитное поле вобмотках и его поток Ф совершают
круговое вращение.
Частота вращения магнитного поля
статора определяется
60 f
n1
, об / мин
p
где f - частота тока питающей
сети, Гц;
p - число пар полюсов.
Рис. 7 – Электромагнитные
состояния трехфазной обмотки
статора
Если принять f = 50 Гц, то для различных
чисел пар полюсов (р=1, 2, 3, 4…)
n1=3000, 1500, 1000, 750, об/мин.
11
12. 3. Принцип действия асинхронного двигателя
1213. Принцип действия АД
Разность между частотами полястатора n2 и ротора n1 называется
частотой скольжения Δn.
n n1 n2
Отношение частоты скольжения
к
частоте
поля
называется
скольжением
S
n1 n2
n1
60 f
1 S
n2 n1 1 S
p
13
14.
II1
2
a
1
X1
r1
r2|
R0
I10
U1
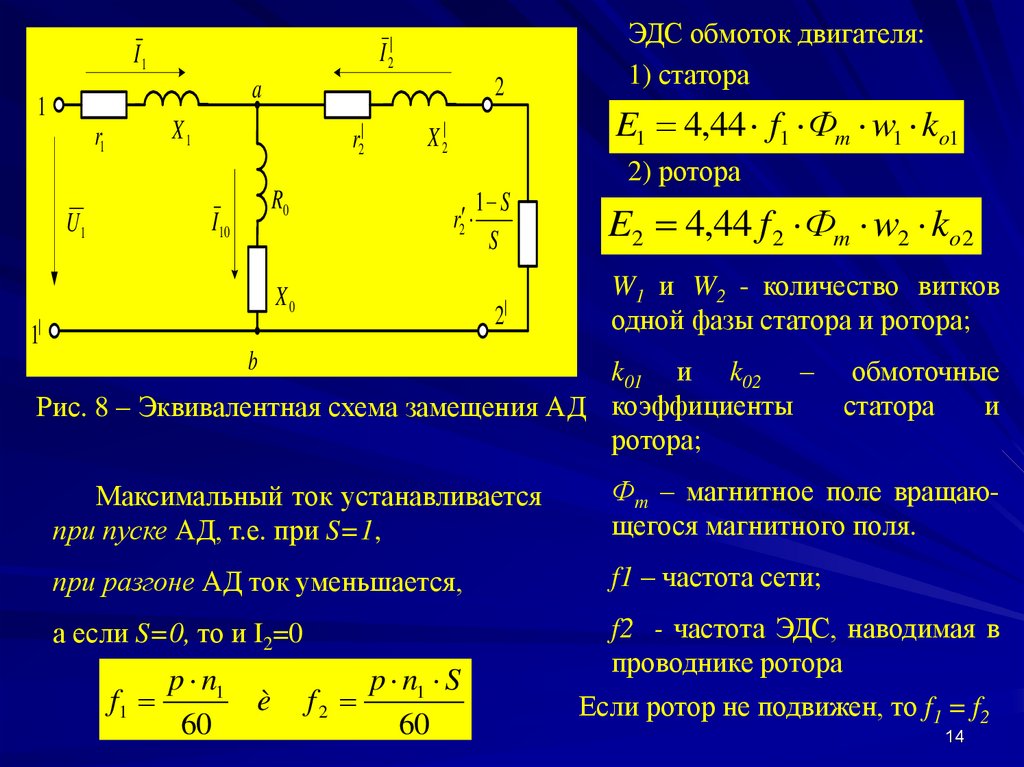
ЭДС обмоток двигателя:
1) статора
|
2
E1 4,44 f1 Фm w1 ko1
X 2|
r2
X0
1 S
S
2
1|
|
2) ротора
E2 4,44 f 2 Фm w2 ko 2
W1 и W2 - количество витков
одной фазы статора и ротора;
b
k01 и k02 –
- Схема замещениясхема
трансформатора
Рис.Рис.6.3
8 – Эквивалентная
замещения АД коэффициенты
ротора;
обмоточные
статора
и
Максимальный ток устанавливается
при пуске АД, т.е. при S=1,
Фm – магнитное поле вращающегося магнитного поля.
при разгоне АД ток уменьшается,
f1 – частота сети;
а если S=0, то и I2=0
f2 - частота ЭДС, наводимая в
проводнике ротора
f1
p n1
60
è
f2
p n1 S
60
Если ротор не подвижен, то f1 = f2
14
15. Режимы работы асинхронных машин
1. При n1> n2 – режим двигателя;2. При n1< n2 – режим генератора;
3. При n1= n2 – искусственный режим – режим
идеального нерабочего (холостого) хода;
4. Если поле вращается в одну сторону, а
ротор посторонней силой в другую – режим
электромагнитного тормоза.
15
16. Паспортные данные АД
12
3
4
1- тип АД с короткозамкнутым
ротором обдуваемого исполнения серии 4А, четырехполюсной;
2 - мощность на валу 3 кВт;
3 - степень защиты от соприкосновения с токоведущими
вращающими частями и от
попадания водяных брызг;
4 - частота вращения при
номинальной нагрузке 1420
об/мин;
Рис. 9 - Табличка с паспортными данными
16
17. 4. Пуск, регулирование частоты вращения и торможение АД
1718. 4.1 Способы пуска АД
4.1.1. АД с короткозамкнутым роторомВключаются АД малой и средней
мощности.
Рубильник или автоматический
выключатель отключает АД в
сети при перегрузках и к.з.
Рис. 10 – Пуск АД с непосредственным
включением в сеть (прямой пуск)
18
19.
АВ
А
С
В
А
С
В
С
QF1
QF
QF2
Р
С1 С2 С3
«Δ»
АТ
QS
C2
C2
«Y» QF1
C1
а)
QF2
Р
QF3
0
С4 С5 С6
Р
б)
C3
C3
C1
в)
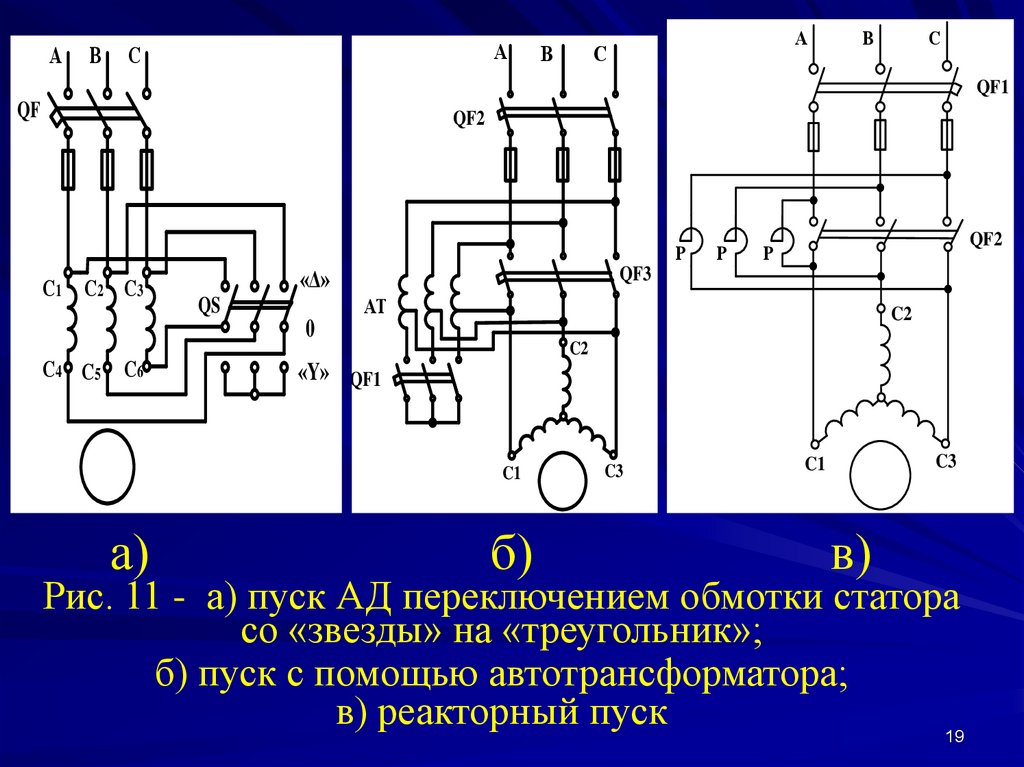
Рис. 11 - а) пуск АД переключением обмотки статора
со «звезды» на «треугольник»;
б) пуск с помощью автотрансформатора;
в) реакторный пуск
19
20. 4.1.2. АД с фазным ротором
A U1
B
C
C3
U2
Пуск
C1
Работа
C2
Р2
ПР
4321
Р1
Р3
Рис. 12 – Пуск с помощью
пускового реостата
Пуск сопровождается переходным
процессом, обусловленным переходом
ротора и механически связанного с ним
исполнительного (рабочего) механизма
из состояния покоя в состояние
равномерного
вращения,
когда
U1 = -E1
вращающий
момент
двигателя
уравновешивается
суммой
противодействующих
моментов,
действующих на ротор двигателя.
Процесс реостатного пуска АД с
α
фазным
ротором является наиболее
благоприятным, так как в нем
сочетаются
значительный пусковой
E 2 U2
E1
момент со сравнительно небольшим
пусковым
током
(в
2-3
раза
превышающем
номинальный
ток
двигателя).
20
21. 4.2 Способы регулирования частоты вращения трехфазных АД
60 fчастота вращения АД - n2 n1 1 S
1 S
p
Регулирование частоты вращения АД можно
осуществить:
1. Изменением скольжения S
2. Изменением
частоты тока в обмотке
статора f1
3. Изменением числа пар полюсов 2 р
21
22.
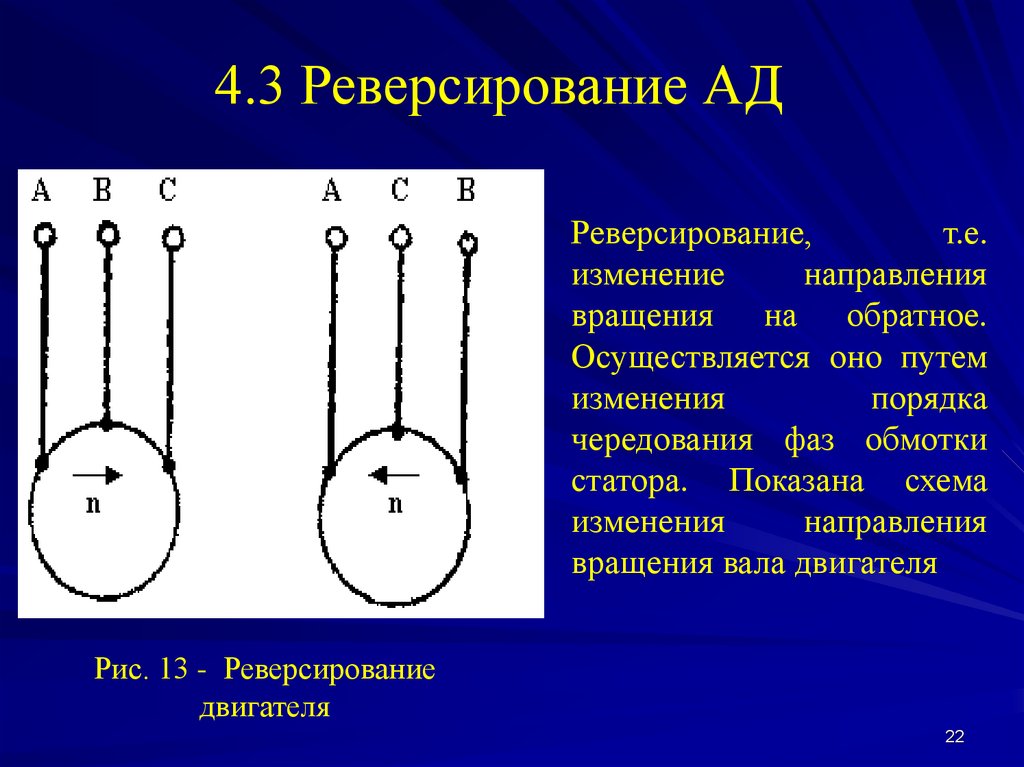
4.3 Реверсирование АДРеверсирование,
т.е.
изменение
направления
вращения на обратное.
Осуществляется оно путем
изменения
порядка
чередования фаз обмотки
статора. Показана схема
изменения
направления
вращения вала двигателя
Рис. 13 - Реверсирование
двигателя
22
23.
4.4 Торможение АДМеханическое
торможения
муфтами,
электромагнитными лентами, колодками и т.д.
2. Электродинамическое торможение, когда после
отключения двигателя от сети переменного тока в его
обмотки подается постоянный ток. В этом случае
постоянное магнитное поле заметно сокращает выбег
ротора.
3. Торможение "противовыключением".
После отключения двигателя от сети его
кратковременно включают на вращение в обратную
сторону. Как только оставшаяся частота вращения
ротора n2 станет равной нулю, двигатель отключается
от сети.
1.
23
24. 5. Вращающий момент АД
2425.
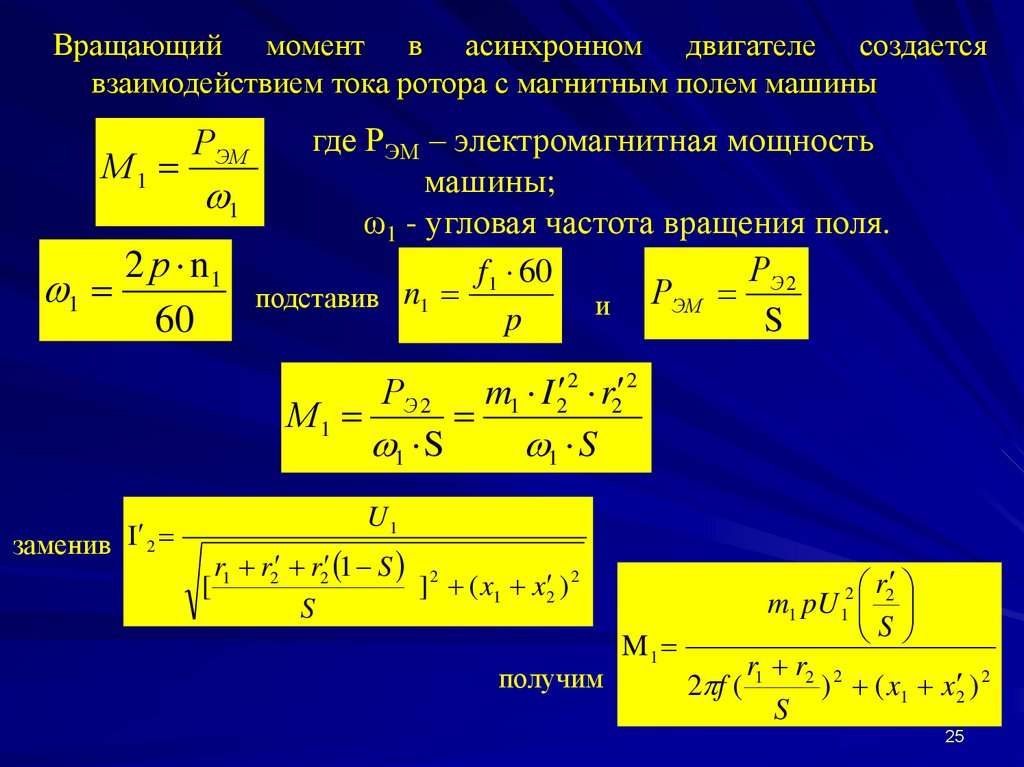
Вращающий момент в асинхронном двигателе создаетсявзаимодействием тока ротора с магнитным полем машины
где РЭМ – электромагнитная мощность
М1
машины;
1
ω1 - угловая частота вращения поля.
2 р n1
РЭ 2
f1 60
1
подставив n1
и РЭМ
p
S
60
РЭМ
РЭ 2 m1 I 2 2 r2 2
М1
1 S
1 S
заменив I 2
U1
r1 r2 r2 1 S 2
[
] ( x1 x 2 ) 2
S
r2
m1 pU
S
M1
r1 r2 2
получим
2 f (
) ( x1 x 2 ) 2
S
2
1
25
26. 6. Механическая и рабочие характеристики асинхронного двигателя
2627.
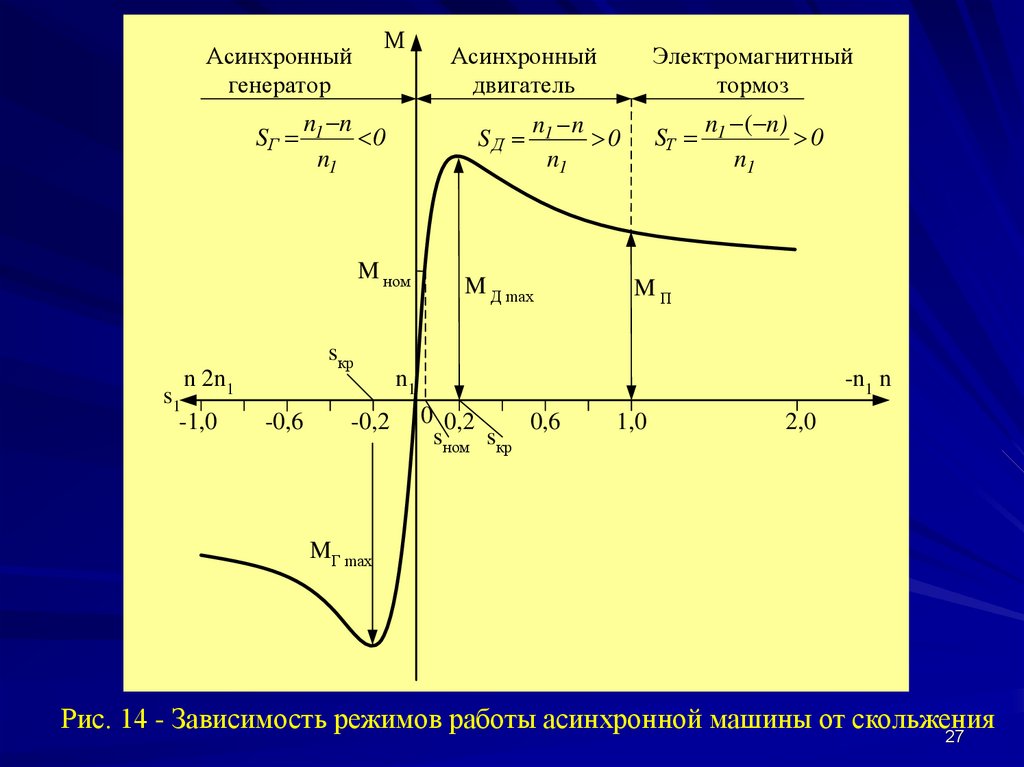
МАсинхронный
генератор
SГ
n1 n
0
n1
SД
M ном
n 2n1
s1
-1,0
sкр
-0,6
-0,2
Асинхронный
двигатель
Электромагнитный
тормоз
n1 n
0
n1
M Д max
SТ
n1 ( n)
0
n1
MП
n1
-n1 n
0 0,2
0,6
sном sкр
1,0
2,0
MГ max
Рис. 14 - Зависимость режимов работы асинхронной машины от скольжения
27
28. Механическая характеристика АД – зависимость скорости вращения ротора от электромагнитного момента n2=f(M)
1) Режим холостого ходаS
n2,об/мин
0
Sн
n0
nн
S кр
nкр
SХ=0; МХ=0
n=f(M)
2) Номинальный режим
Мн
SH
М кр
n n
1 2
n1
P2 H
M H 9,55
n2 H
3) Критический режим
Sкр Sн ( К М К М2 1)
М miп
1
0
Мп
М кр
Нм
Рис. 15 – Механическая характеристика
АД
М
2М кр
S кр S S S кр
М кр К М М н
М кр
, где К М М
н
4) Пусковой режим
- для S = 0,1;0,2;0,4;0,6;08
МП
2М кр
S кр S S S кр
SП 1
28
29.
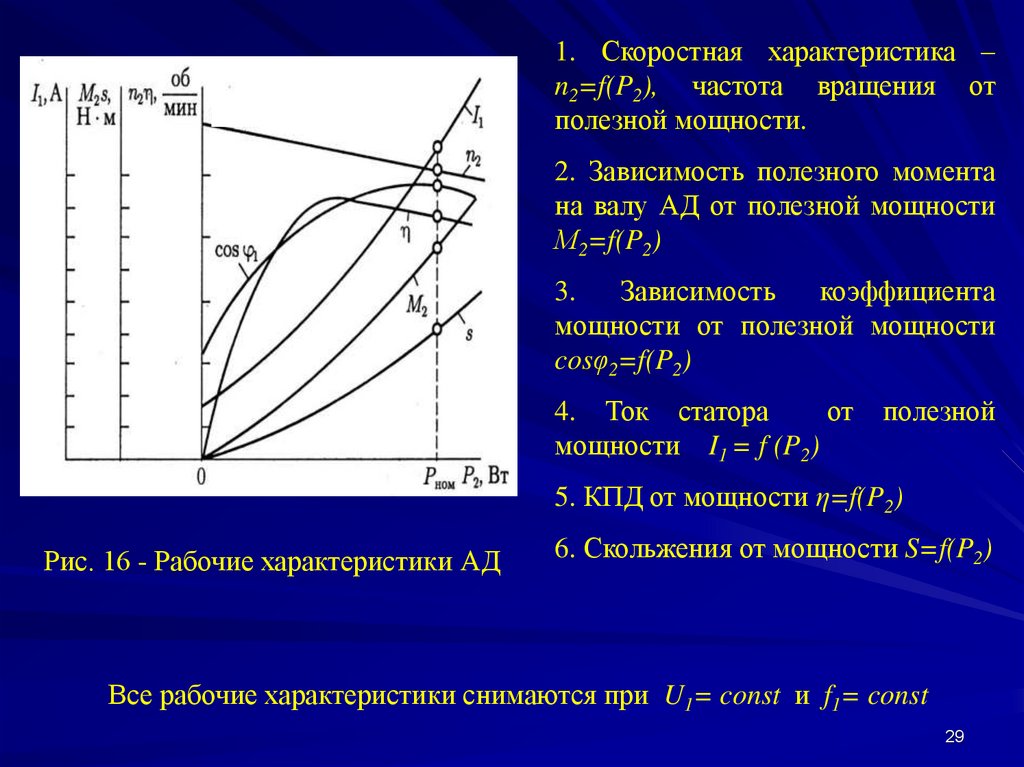
1. Скоростная характеристика –n2=f(P2), частота вращения от
полезной мощности.
2. Зависимость полезного момента
на валу АД от полезной мощности
М2=f(P2)
3.
Зависимость
коэффициента
мощности от полезной мощности
cosφ2=f(P2)
4. Ток статора
от
мощности I1 = f (P2)
полезной
5. КПД от мощности η=f(P2)
Рис. 16 - Рабочие характеристики АД
6. Скольжения от мощности S=f(P2)
Все рабочие характеристики снимаются при U1= const и f1= const
29
30. 7. Энергетическая диаграмма асинхронного двигателя. Потери. Коэффициент полезного действия асинхронного двигателя
3031.
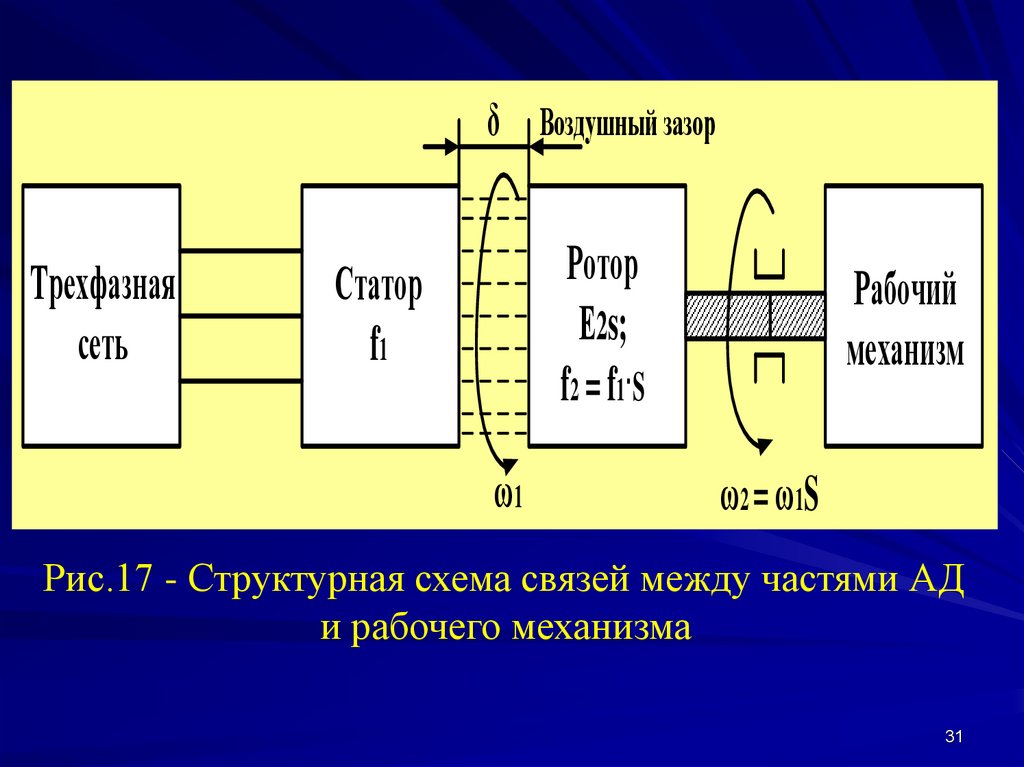
δ Воздушный зазорТрехфазная
сеть
Ротор
Е2s;
f2 = f1·S
Статор
f1
ω1
Рабочий
механизм
ω2 = ω1S
Рис.17 - Структурная схема связей между частями АД
и рабочего механизма
31
32.
На основании закона сохранении и преобразования энергииможно записать:
Р1 3 U1 I1 cos 1 РЭ1 РМ 1 РЭ 2 РМ 2 Рмех Р2
где Р, - мощность, потребления машиной электрической
энергии;
РЭ1 - мощность электрических потерь в обмотке статора;
РМ1 - мощность магнитных потерь в пакете
магнитопровода статора;
РЭ2 - мощность электрических потерь в обмотке ротора;
РМЕХ - мощность механических потерь;
Р2 — полезная механическая мощность двигателя;
РМ2 — мощность магнитных потерь в сердечнике ротора
32
33.
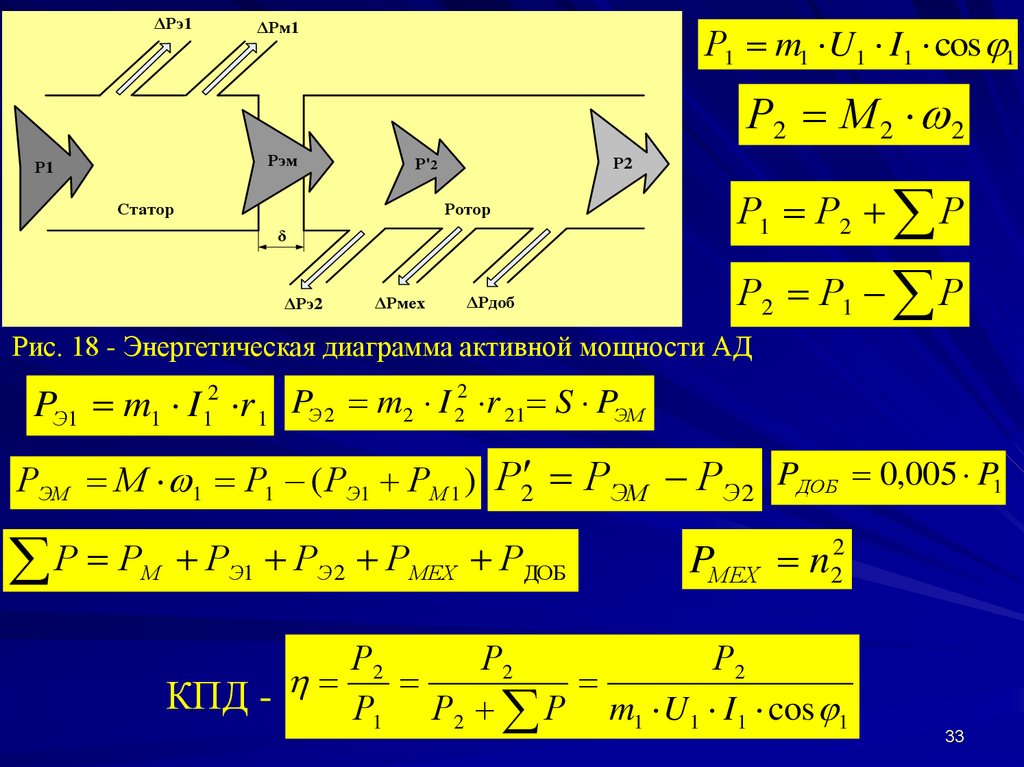
ΔРэ1Р1 m1 U1 I1 cos 1
ΔРм1
Р2 М 2 2
Рэм
Р1
Р2
Р'2
Статор
Ротор
δ
ΔРэ2
ΔРмех
ΔРдоб
Р1 Р2 Р
Р2 Р1 Р
Энергетическая диаграмма асинхронного двигателя
Рис. 18 - Энергетическая
диаграмма активной мощности АД
PЭ1 m1 I r 1
2
1
PЭ 2 m2 I 22 r 21 S PЭМ
РЭМ М 1 Р1 ( РЭ1 РМ 1 ) Р2 РЭМ РЭ 2 PДОБ 0,005 P1
Р РМ РЭ1 РЭ2 РМЕХ РДОБ
PМЕХ n22
Р2
Р2
Р2
КПД - Р1 Р2 Р m1 U 1 I 1 cos 1
33