




 Промышленность
ПромышленностьПохожие презентации:









")
Лекция 5 проектирование АТК. Определение мощности и месторасположения приводных станций конвейеров
1.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
ОПРЕДЕЛЕНИЕ МОЩНОСТИ И МЕСТОРАСПОЛОЖЕНИЯ
ПРИВОДНЫХ СТАНЦИЙ КОНВЕЙЕРОВ
Мощность приводной станции определяется о соответствии с
расчетной статической нагрузкой FСТ и заданной скоростью
движения конвейера :
PC kЗ
FСТ
p
kЗ
Т Нб ТСб ,
p
p - КПД редуктора приводной станции;
kЗ 1,1 1,3 - коэффициент запаса, учитывающий
где
расчета силы сопротивления
неточности
2.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Момент сопротивления на валу двигателей приводной станции при
ip
известном передаточном отношении редуктора
определится
по формуле:
М СТ kЗ
где
D
FСТ D
,
2i p p
— диаметр приводного элемента.
Номинальная мощность двигателей выбирается из условия:
PНОМ PC .
3.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Силы трения покоя существенно больше, чем силы трения при
движении конвейера, поэтому для конвейерных установок характерны
повышенные моменты трогания, которые для конвейерных установок
наружного размещения дополнительно возрастают в зимнее время.
Для конвейеров выбираются двигатели с повышенным пусковым
моментом, обеспечивающим надежный пуск конвейера.
4.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
В случае применения асинхронных электродвигателей необходимо
учитывать возможное снижение напряжения питающей сети.
АД чувствительны к падению напряжения в сети. Момент двигателя
падает пропорционально квадрату падения напряжения в сети.
При допустимом падении напряжения 5% максимальный момент
падает на 10%.
Реальное падение напряжения в сетях горнорудной промышленности
при запуске мощных ленточных конвейеров может достигать 20% и
более. При 20% падении момент составит 0.64 от номинального.
Для мощных технологических линий, содержащих цепочку конвейеров,
запуск конвейеров производится с задержкой времени друг
относительно друга.
В конвейерах с приводами постоянного тока падение напряжения в
сети на пусковой момент не влияет, но при этом снижается скорость.
5.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Привод целесообразно располагать в такой точке трассы конвейера,
которая обеспечивала бы минимум как максимального натяжения
тягового органа, так и Tmax его среднего значения по замкнутому
контуру :
1
Т СР
Тdl.
lСР
Условие соответствует минимально возможному сечению тягового
элемента и наименьшей статической нагрузке привода.
Такое месторасположение приводной станции принимается
оптимальным.
Для общего случая конвейерной трассы со сложной конфигурацией
рассматривается несколько вариантов расположения приводной
станции и принимается тот из них, для которого оказываются
наименьшими Tmax и TСР
6.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
При выборе вариантов исходят из следующих соображений:
1.Привод должен устанавливаться в конце рабочего участка. Это
позволяет разгрузить последующую холостую ветвь конвейера от
больших натяжений рабочего участка.
2.Если в конвейере несколько рабочих участков, отбирают наиболее
тяжелый, на котором происходит максимальное нарастание
натяжения, а также участок, предшествующий самой длинной
холостой ветви. При расположении привода в конце самого
тяжелого участка, существенно уменьшаются максимальные
натяжения на последующих рабочих участках.
3. Размещение привода перед самой длинной холостой ветвью
позволяет снизить среднее по трассе натяжение.
7.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
4.Для конвейеров, работающих на спуск грузов при тормозном режиме
работы привода, последний устанавливается в начале рабочего
участка по ходу тягового элемента.
5.Для ленточных и канатных конвейеров, выполняемых обычно в
односекционном варианте и имеющих одну рабочую (прямую) и
одну холостую (обратную) ветви, привод располагается в конце
рабочей ветви. При этом выполняется сформулированное выше
условие в отношении натяжений тягового органа.
6. Для мощных скребковых конвейеров возможно расположение
приводов в конце и в начале рабочей ветви.
8.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Распределение нагрузок между двигателями
Одной из важных проблем для многодвигательного электропривода
конвейеров является обеспечение равномерного распределения
нагрузок между двигателями.
Широко распространенной является схема, когда два двигателя
конвейера работает на один вал. Такие конструктивные решения
применяются в конвейерах большой мощности или при ограничении
объемов рабочего пространства (угольные шахты).
При параллельном включении двигателей, имеющих равные скорости
идеального холостого хода и связанных общим механическим валом,
нагрузка между ними распределяется пропорционально модулю
жесткости их механических характеристик:
9.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Применительно к двухдвигательному приводу моменты первого М1 и
второго М2 двигателей определяются из соотношений:
М1
1
1 2
М СТ ;
М2
2
1 2
М СТ ,
Где 1 и 2- модули жесткости механических характеристик первого
и второго
двигателей;
М СТ - результирующий момент сопротивления приводной станции.
10.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Если каждый из двух двигателей выбран на номинальный момент,
М НОМ
1
М СТ
2
то двигатель с большим значением окажется перегруженным. При
длительном режиме работы даже небольшая перегрузка может
вывести из строя двигатель, поэтому важно обеспечить условие:
1 2
Для выполнения этого условия необходимо применять строго
идентичные по исполнению, мощности и скорости двигатели.
11.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Фактически эти требования невыполнимы, т.к. при производстве
электрических машин существует технологический разброс
параметров, который приводит к разнице в сопротивлениях обмоток и
к изменениям магнитного потока.
Любые изменения и несоответствия параметров двух машин
приводят к изменению жесткости их механических характеристик и,
как следствие, к неравномерности распределения нагрузок.
12.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
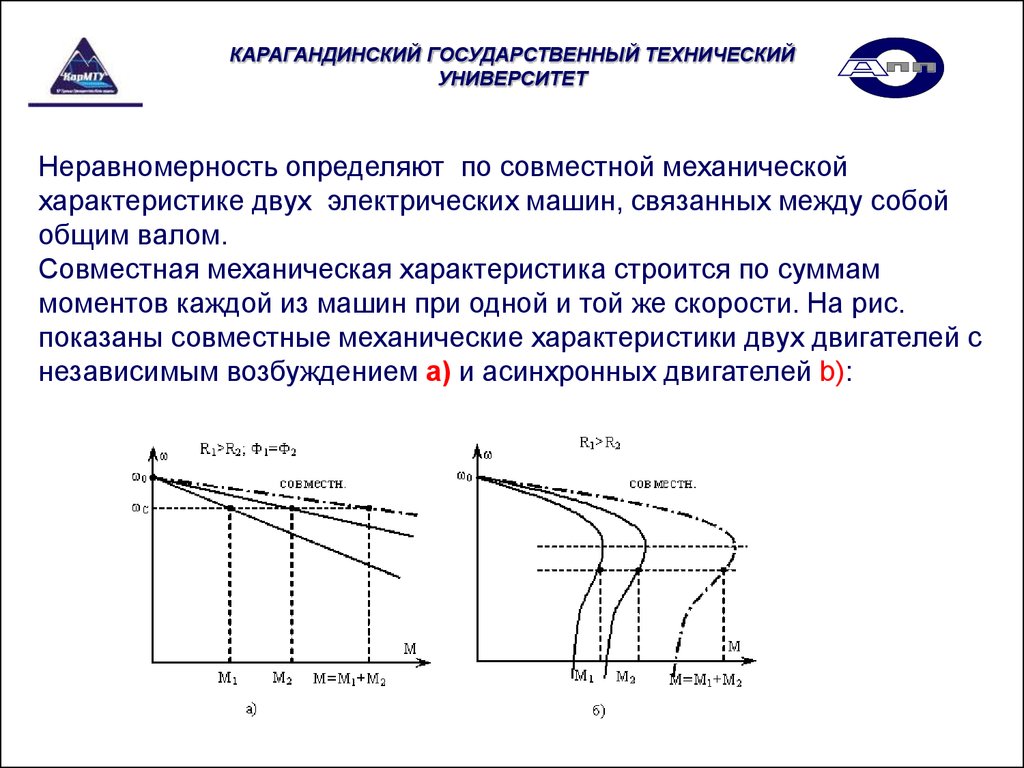
Неравномерность определяют по совместной механической
характеристике двух электрических машин, связанных между собой
общим валом.
Совместная механическая характеристика строится по суммам
моментов каждой из машин при одной и той же скорости. На рис.
показаны совместные механические характеристики двух двигателей с
независимым возбуждением a) и асинхронных двигателей b):
13.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
При
этом
распределение
нагрузок
осуществляется
пропорционально
модулю
жесткости
механической
характеристики: двигатели с большей жесткостью берут на себя
большую часть нагрузки и, соответственно, перегружаются. При
допустимом по ТУ и стандартам разбросу жесткостей
механической характеристики до 15-20 %, перегрузка
двигателей достигает таких же значений.
14.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Выравнивание нагрузок в многодвигательном электроприводе
является одной из важнейших задач проектирования и
осуществляется различными способами:
•для асинхронных двигателей с фазным ротором более жесткая
характеристика смягчается за счет введения в роторную цепь
дополнительного сопротивления,
•для двигателей постоянного тока - за счет введения дополнительного
сопротивления в цепь якоря,
•по системе электрический и механический вал,
•в регулируемых электроприводах - за счет использования
индивидуальных преобразователей и дополнительных контуров
регулирования.
15.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
В приводных станциях, где двигатели механически соединяются
через упругий тяговый элемент, проблема выравнивания нагрузок
имеет свои особенности. Рассмотрим
их
на
примере
двухбарабанной приводной станции ленточного конвейера .
16.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Натяжение Т2 ленты в точке набегания 2 второго барабана
меньше, чем натяжение Т1 в точке набегания 1 первого
барабана. Поэтому сечение ленты Q1
и ее плотность 1 в
точке 1 меньше, чем сечение Q2и плотность ленты в точке 2.
Так как масса ленты, проходящая в единицу времени,
одинакова для любой точки конвейера, то можно записать:
2
1Q1 1 2Q2 2 ,
Где — 1, 2 линейные скорости ленты на входных точках
первого и второго барабанов.
17.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Изменения плотности ленты обусловлены изменениями ее объема
при деформации растяжения, поэтому:
1 1 l2 / l Q2
,
2 1 l1 / l Q1
где; l2 / l l1 / l — относительные удлинения ленты в точках 1 и 2,
обусловленные натяжениями Т1 и Т 2 соответственно.
Переходя к угловой скорости двигателей, получаем:
1 l / l 1 Т / EQ
1 1 l2 / l 1 Т2 / EQ ,
1
1
2
где E — модуль упругости при растяжении тягового элемента;
Q — сечение ленты в недеформированном состоянии.
18.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Так как Т1 Т,2 , то 1 2 и при идентичности механических
характеристик двигатель, имеющий меньшую угловую скорость,
испытывает большую нагрузку, чем другой (характеристика 1 на рис.
2
б). В общем случае модули жесткости 1 и
механических
характеристик двигателей могут быть различными. При этом моменты
первого и второго двигателей соответственно М
и М составят:
1
М 1 1 0 1 ,
М 2 2 0 2 .
2
19.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Так как результирующий момент сопротивления:
М СТ М1 М 2 ,
то после преобразований и с учетом того, что скорости
двигателей связаны соотношением, получаем:
М1
2 1
М СТ / 2 1 2
2 0
1
1
;
М
С
М2
2 2
М СТ / 2 1 2
1 0
1
1
.
М СТ
20.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Приравнивая эти уравнения, находим условие
равномерного распределения нагрузки между
двигателями:
2
1
.
2 1 1 0 / М СТ
При выполнении этого условия
каждый из двигателей будет
М СТ / 2,
развивать момент, равный
,а скорости
двигателей
1
2
будут иметь значения соответственно
и
(характеристики
1 и 2 на рис. сл.36., механические характеристики).
21.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
Спасибо за внимание!
Зав кафедрой автоматизации
производственных процессов
д.т.н., проф. Брейдо Иосиф Вульфович
Тел. +77212(565184)
+77771343827
E-mail: jbreido@kstu.kz
jbreido@mail.ru