
 Физика
ФизикаПохожие презентации:




")


")
Учебно-исследовательская работа студентов. Процесс регулирования. Регулятор Уатта
1.
Учебно-исследовательскаяработа студентов - 1
(системы, управление, поведение)
2.
Задачи УИРС1. Динамическая система (планетарная система). Среда моделирования
2. Статическая логическая система – модель текста
3. Структурирование функциональной системы «Питание семьи» – IDEFтехнология
4. Системы с обратной связью
5. Регулирование, управление, организация
• Система – элементы и связи. Состав и структура. Схема системы
• Формализация
• Переменная, способ выделения из описания. Значения переменных
• Операции с переменными (И, ИЛИ, НЕ)
• Причинно-следственные связи (ЕСЛИ-ТО).
• ГОСТ 7.32-2001 на оформление научно-исследовательских работ
• Летняя практика – взаимодействующие системы
3.
Домашнее задание – 4 штуки1. Собрать, оттестировать и сдать проект «Модель Солнечной системы».
Работающий проект в файле *.rar с названием «Фамилия_ЛБ1_УИРС1».
2. Собрать, оттестировать и сдать проект «Модель литературного
произведения». Отчет по ГОСТ 7.32-2002 и работающий проект в файле *.rar
с названием «Фамилия_ЛБ2_УИРС1»
3. Нарисовать и сдать в технологии IDEF схему и ее декомпозицию «Питание
семьи». Рисунки. Файл *.rar с названием «Фамилия_ЛБ3_УИРС1»
4. Нарисовать свой граф (задать 12-15 вершин, 2-4 связи от каждой
вершины, численную нагрузку связей). Найти минимальный и
максимальный путь в графе. Отчет по ГОСТ.
Отправка на почту moi@stratum.ac.ru c соблюдением правил делового
общения.
• Следующее занятие по УИРС состоится в понедельник 14.12.2020 в
режиме видео конференции. О времени проведения занятия будет
объявлено дополнительно по e-mail.
• Требования: аккуратно, тщательно, вдумчиво, талантливо
4.
Процесс регулирования.Регулятор Уатта
Регулирование - поддержание
постоянных или плановых параметров
процесса
5.
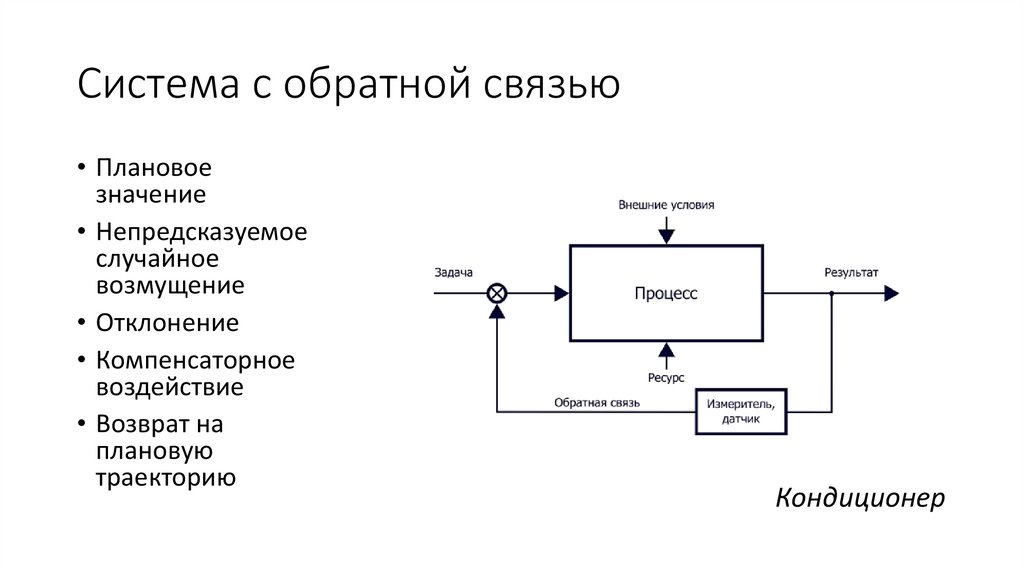
Система с обратной связью• Плановое
значение
• Непредсказуемое
случайное
возмущение
• Отклонение
• Компенсаторное
воздействие
• Возврат на
плановую
траекторию
Кондиционер
6.
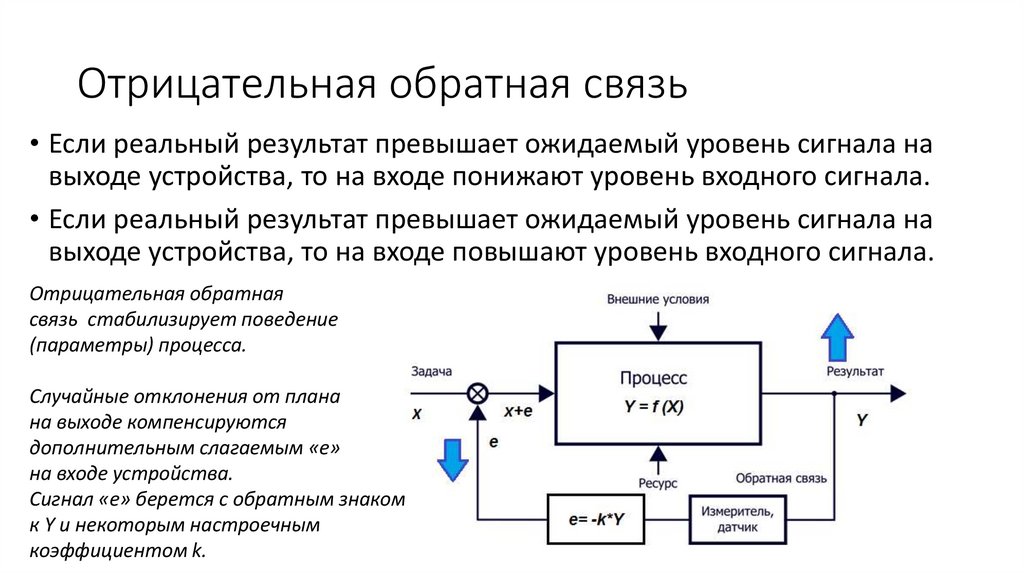
Отрицательная обратная связь• Если реальный результат превышает ожидаемый уровень сигнала на
выходе устройства, то на входе понижают уровень входного сигнала.
• Если реальный результат превышает ожидаемый уровень сигнала на
выходе устройства, то на входе повышают уровень входного сигнала.
Отрицательная обратная
связь стабилизирует поведение
(параметры) процесса.
Случайные отклонения от плана
на выходе компенсируются
дополнительным слагаемым «е»
на входе устройства.
Сигнал «е» берется с обратным знаком
к Y и некоторым настроечным
коэффициентом k.
7.
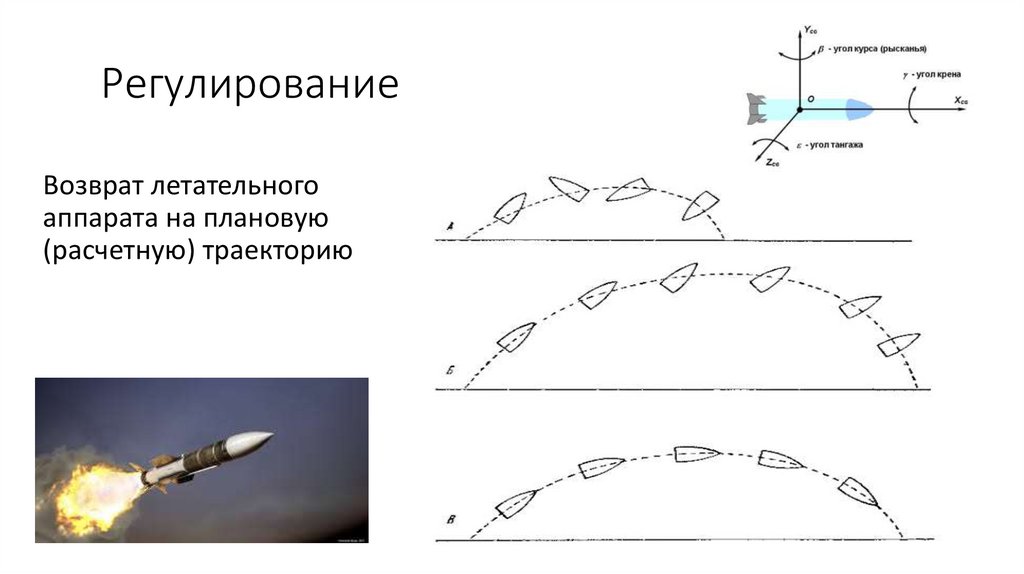
РегулированиеВозврат летательного
аппарата на плановую
(расчетную) траекторию
8.
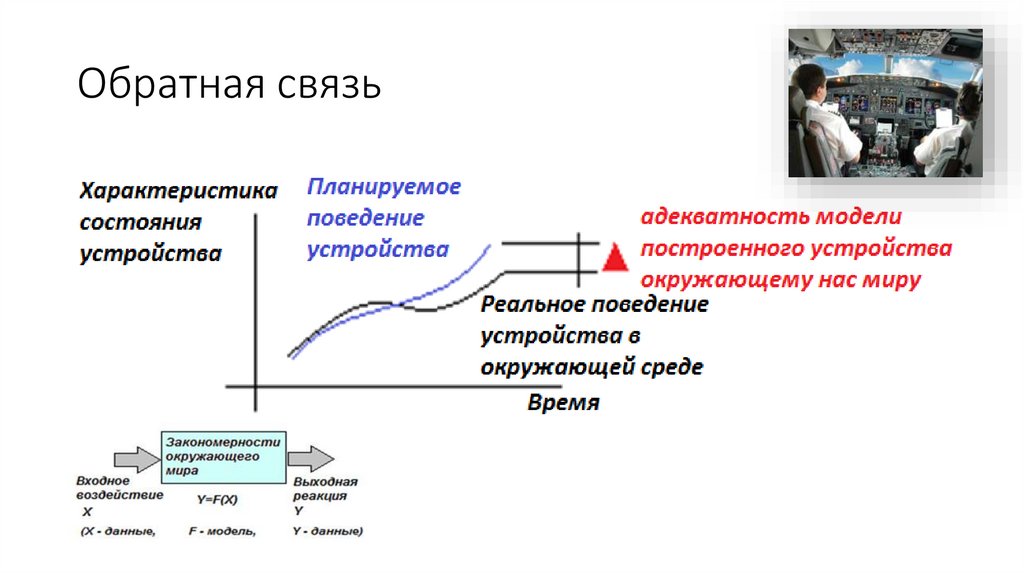
Обратная связь9.
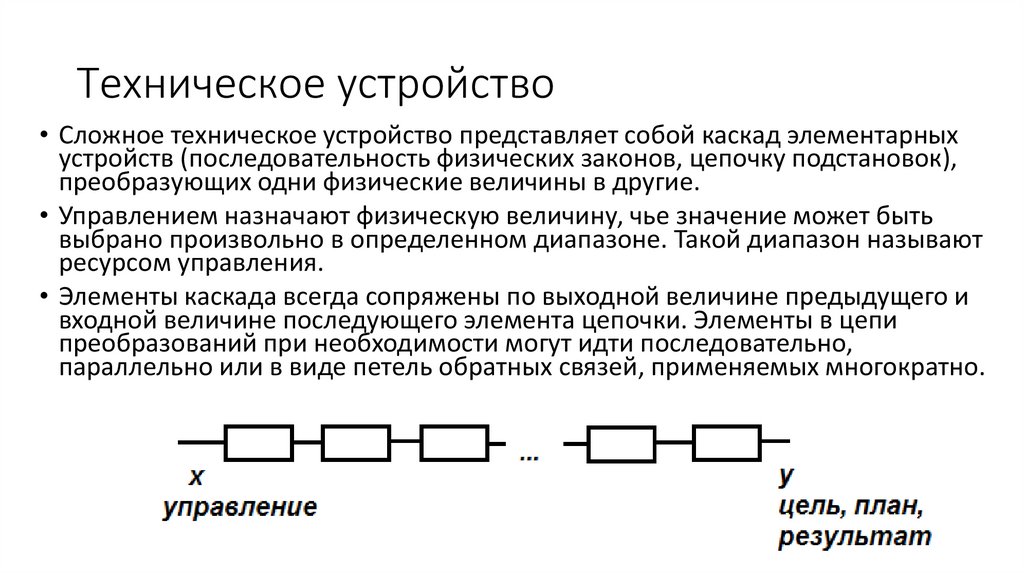
Техническое устройство• Сложное техническое устройство представляет собой каскад элементарных
устройств (последовательность физических законов, цепочку подстановок),
преобразующих одни физические величины в другие.
• Управлением назначают физическую величину, чье значение может быть
выбрано произвольно в определенном диапазоне. Такой диапазон называют
ресурсом управления.
• Элементы каскада всегда сопряжены по выходной величине предыдущего и
входной величине последующего элемента цепочки. Элементы в цепи
преобразований при необходимости могут идти последовательно,
параллельно или в виде петель обратных связей, применяемых многократно.
10.
Управление• Там, где не
справляется
регулирование
• Расчет плановой
траектории
достижения цели
заново
• Иногда отклонение
от плана столь
велико, что возврат
к нему невозможен
или неэффективен
в силу новых
обстоятельств
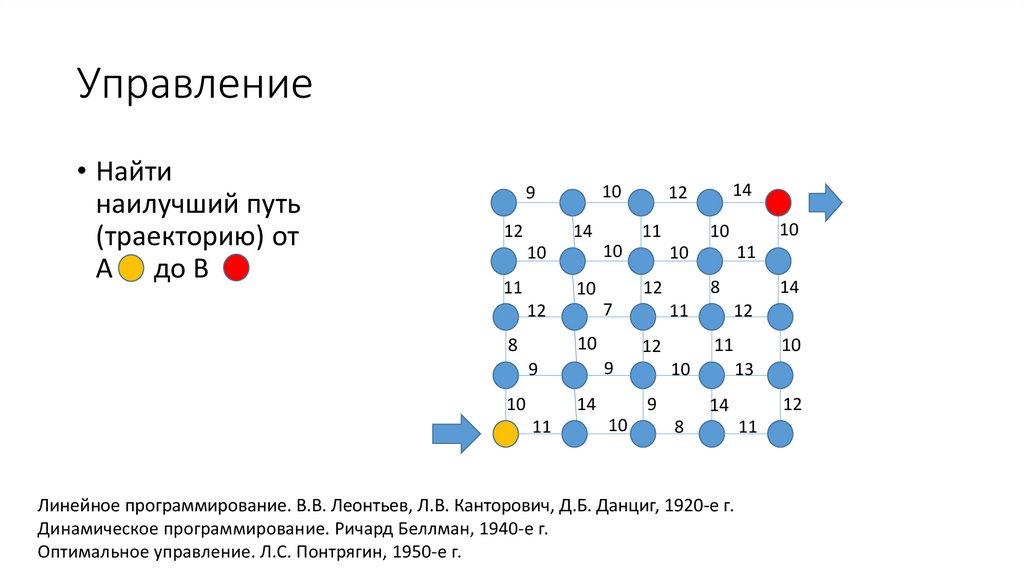
11.
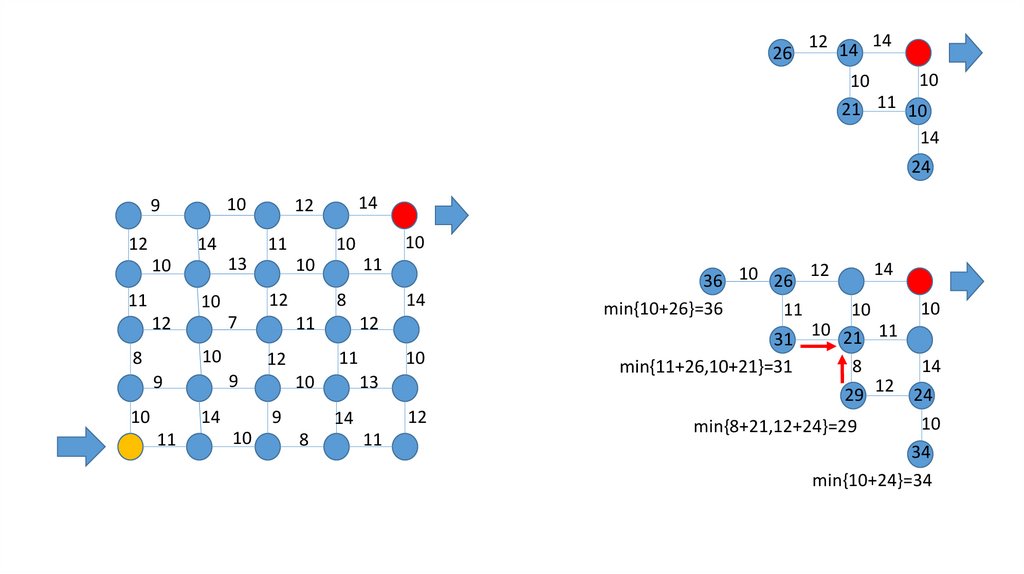
Управление• Найти
наилучший путь
(траекторию) от
А до В
10
9
12
14
11
11
10
10
10
8
10
12
10
9
10
14
11
12
14
11
8
11
9
9
11
10
7
12
10
10
12
10
14
12
10
13
12
14
8
Линейное программирование. В.В. Леонтьев, Л.В. Канторович, Д.Б. Данциг, 1920-е г.
Динамическое программирование. Ричард Беллман, 1940-е г.
Оптимальное управление. Л.С. Понтрягин, 1950-е г.
11
12.
109
12
14
10
10
11
11
10
8
10
14
11
11
9
9
8
12
10
9
10
14
11
12
10
13
12
14
8
14
10
11
10
7
12
10
10
12
10
14
14
12
11
10
13.
1414
10
10
10
9
12
11
14
13
10
11
10
8
10
12
10
9
10
14
11
12
14
11
8
11
9
9
11
10
7
12
10
10
12
10
14
12
10
13
8
11
12 14 14
10
10
21 11 10
14
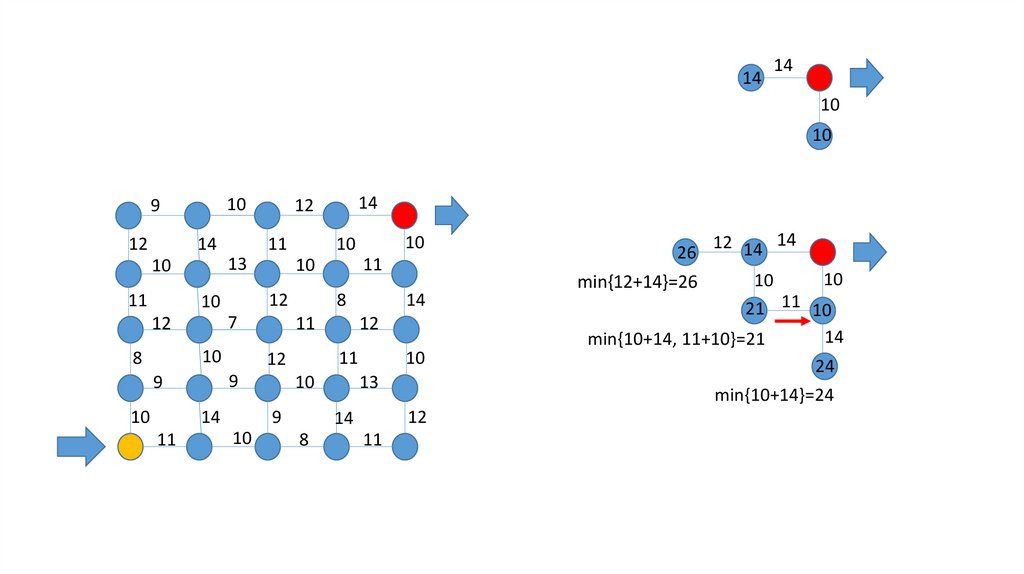
min{10+14, 11+10}=21
24
min{12+14}=26
min{10+14}=24
12
14
26
14.
2612 14 14
10
10
21 11 10
14
24
10
9
12
11
14
13
10
11
10
8
10
12
10
9
10
14
11
12
14
11
8
11
9
9
11
10
7
12
10
10
12
10
14
12
10
13
12
14
8
11
14
12
36 10 26
min{10+26}=36
10
11
10
31 10 21 11
8
14
min{11+26,10+21}=31
29 12 24
10
min{8+21,12+24}=29
34
min{10+24}=34
15.
109
12
13
10
11
10
8
10
12
10
9
10
14
11
12
14
11
8
11
9
9
11
10
7
12
10
10
12
10
14
12
11
14
13
12
11
45 9
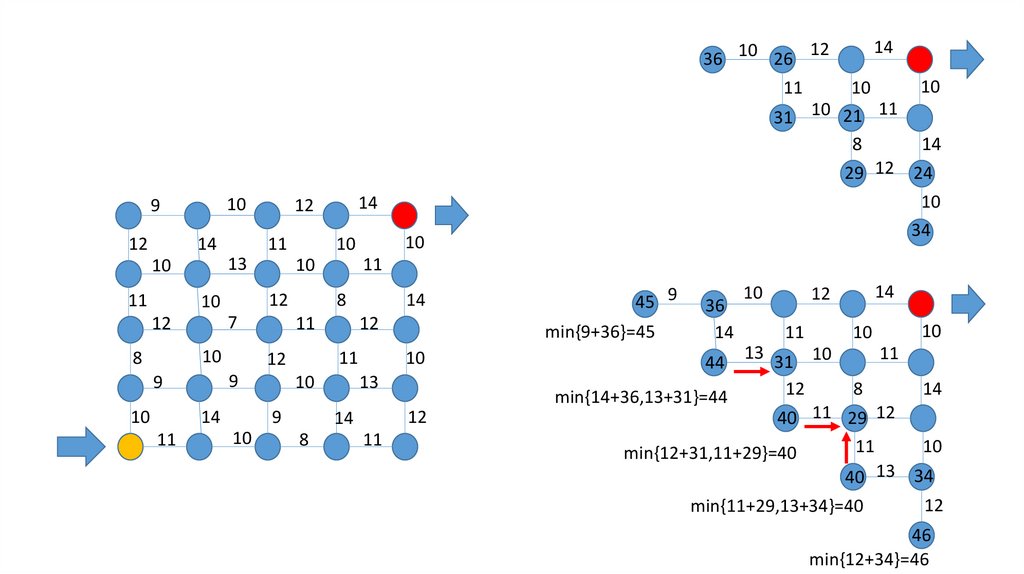
min{9+36}=45
10
14
8
14
36 10 26 12
10
11
10
31 10 21 11
8
14
29 12 24
10
34
36
14
10
14
12
11
10
10
13 31 10
11
8
14
12
min{14+36,13+31}=44
40 11 29 12
11
10
min{12+31,11+29}=40
40 13 34
44
min{11+29,13+34}=40
12
46
min{12+34}=46
16.
45 936
14
44
10
9
12
11
14
13
10
11
10
8
10
14
11
11
9
9
8
10
12
10
9
10
13
12
14
8
10
10
13 31 10
11
8
14
12
40 11 29 12
11
10
40 13 34
12
46
14
11
12
11
11
10
7
12
14
12
10
10
12
10
14
12
10
11
10
45 9
12
14
14
12
11
10
10
11
10
54 10 44 13
8
14
12
10
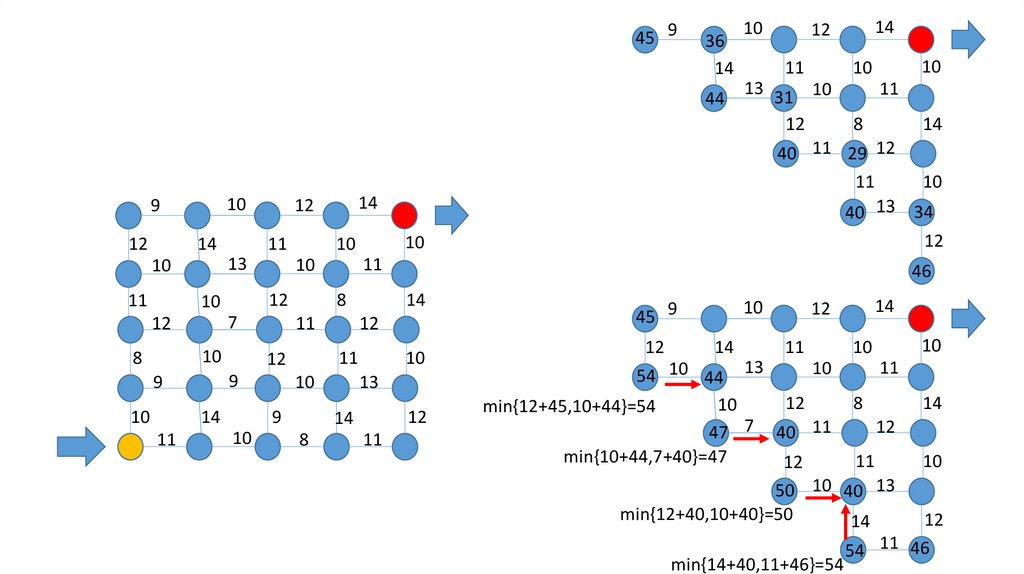
min{12+45,10+44}=54
12
47 7 40 11
min{10+44,7+40}=47
11
10
12
50 10 40 13
min{12+40,10+40}=50
12
14
54 11 46
min{14+40,11+46}=54
17.
1045 9
12
11
14
10
12
11
14
13
10
11
7
12
10
8
10
10
9
10
12
10
13
12
14
8
11
10
9
14
11
12
14
11
11
9
9
8
12
10
14
12
10
12
54 11 46
14
12
11
10
8
14
10
10
11
11
12
50 10 40 13
14
12
10
10
10
54 10 44 13
12
10
47 7 40 11
9
14
12
12
54 10
11
59 12
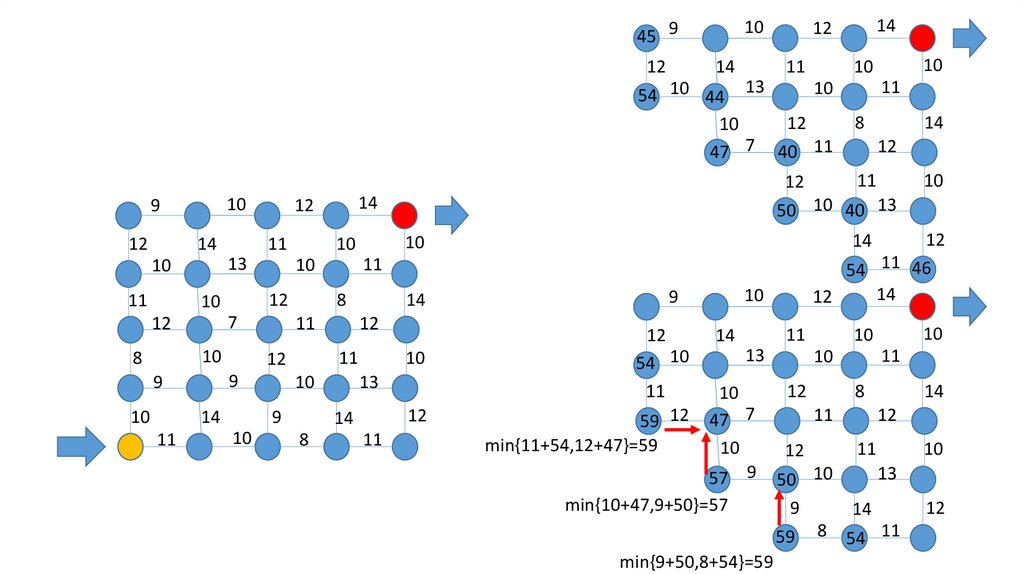
min{11+54,12+47}=59
11
14
13
10
47 7
10
57 9
min{10+47,9+50}=57
min{9+50,8+54}=59
11
10
8
12
11
12
10
10
14
12
11
13
50 10
9
14
59 8 54 11
10
12
18.
109
12
54 10
11
59 12
10
9
12
11
14
13
10
11
10
8
10
14
11
11
9
9
8
12
10
9
10
14
11
12
10
13
11
12
11
10
14
12
11
12
10
13
50 10
9
14
59 8 54 11
10
10
11
10
12
12
14
12
13
10
11
8
12
11
14
10
10
10
10
9
11
12
14
8
10
47 7
10
57 9
11
10
7
12
13
10
10
12
10
14
12
11
14
14
12
8
7
11
12
59 12
10
8
11
12
10
13
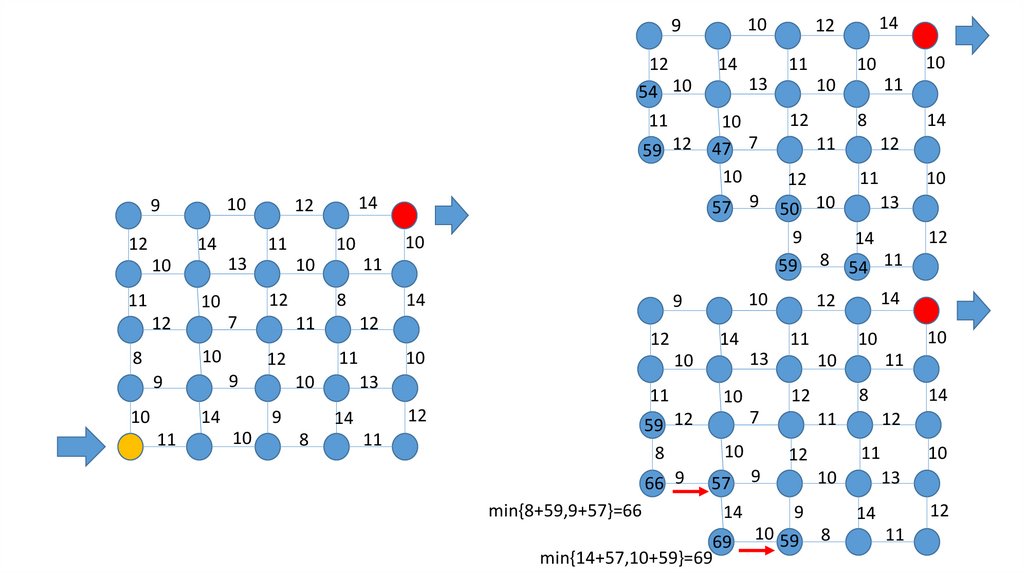
66 9 57 9
min{8+59,9+57}=66
14
9
14
11
69 10 59 8
min{14+57,10+59}=69
14
10
12
19.
109
12
13
10
11
10
12
11
14
13
10
11
10
8
10
10
9
10
12
10
11
13
12
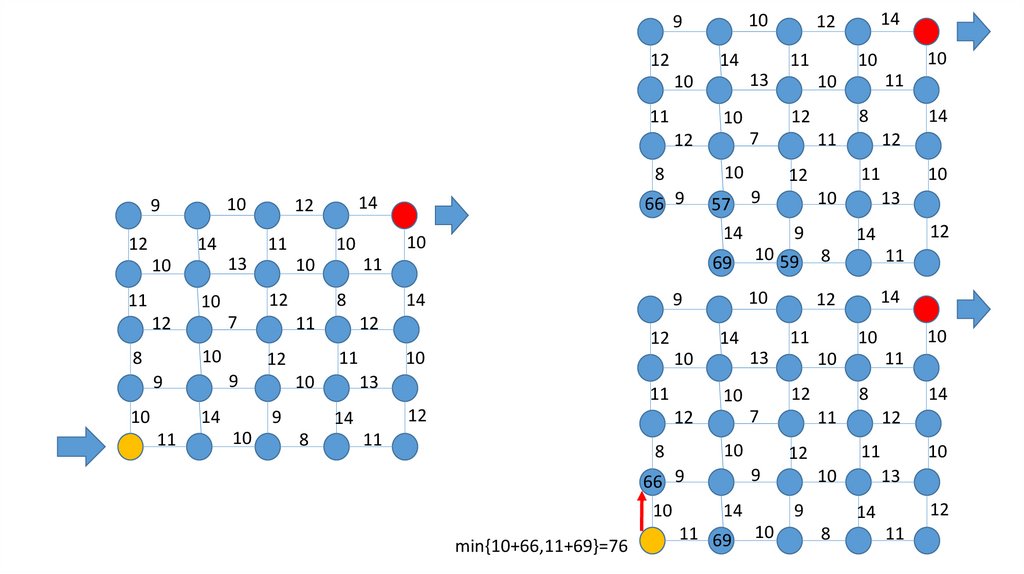
11
min{10+66,11+69}=76
10
10
14
14
10
11
8
11
14
12
11
12
10
9
10
11
10
12
9
11 69
12
14
10
7
59 12
8
66 9
10
13
12
11
10
12
11
12
14
14
11
10
10
13
14
8
12
8
10
57 9
14
9
69 10 59 8
9
14
11
12
14
11
8
11
9
9
11
10
7
12
10
10
12
10
66 9
14
12
11
10
7
10
8
10
10
12
10
12
9
11
14
14
12
10
13
12
14
8
11
20.
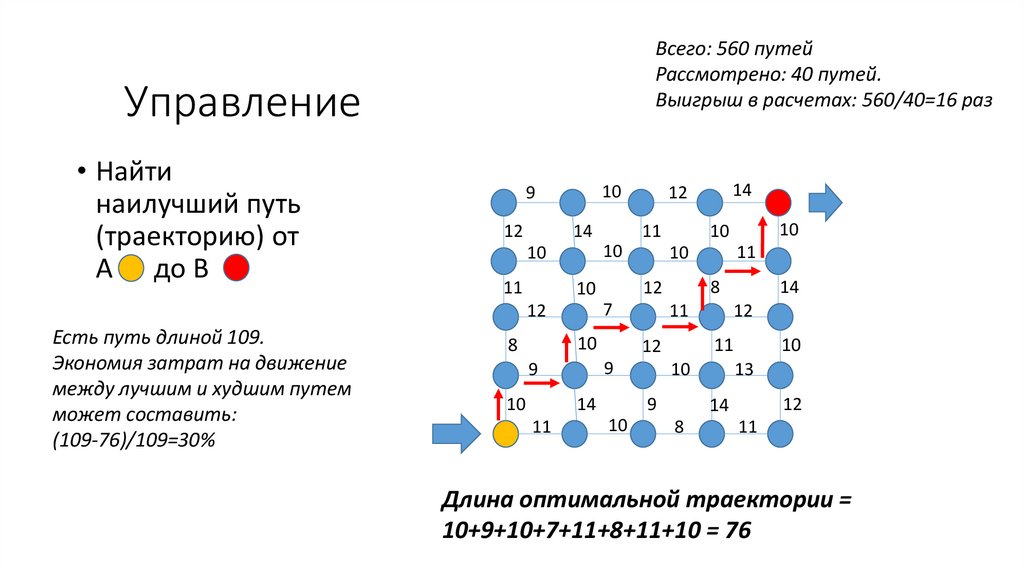
Всего: 560 путейРассмотрено: 40 путей.
Выигрыш в расчетах: 560/40=16 раз
Управление
• Найти
наилучший путь
(траекторию) от
А до В
10
9
12
14
11
10
12
10
9
10
14
11
12
14
11
8
11
9
9
11
10
7
10
8
10
10
12
10
12
Есть путь длиной 109.
Экономия затрат на движение
между лучшим и худшим путем
может составить:
(109-76)/109=30%
11
10
10
14
12
10
13
12
14
8
11
Длина оптимальной траектории =
10+9+10+7+11+8+11+10 = 76
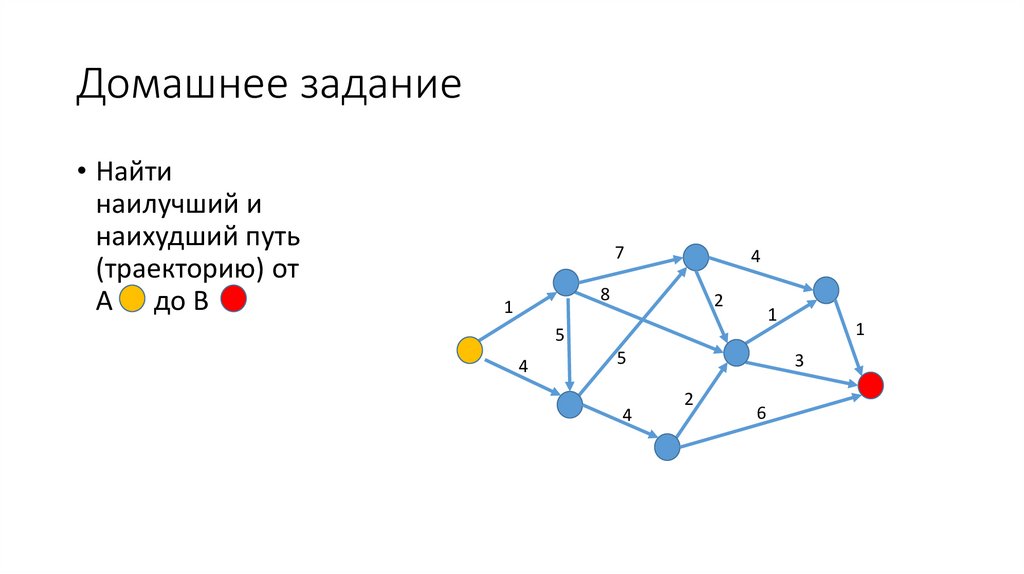
21.
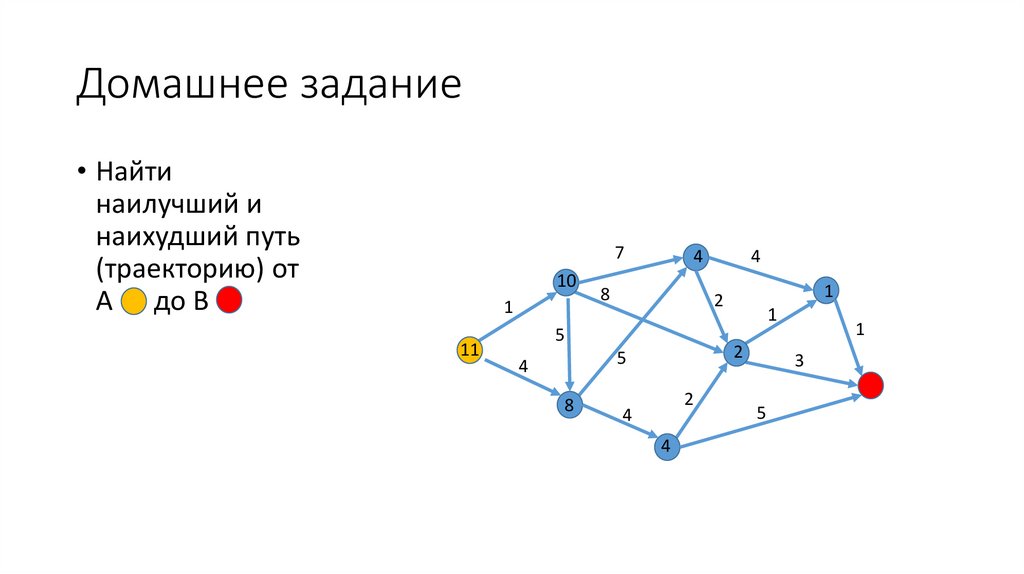
Домашнее задание• Найти
наилучший и
наихудший путь
(траекторию) от
А до В
7
4
8
1
2
1
1
5
4
5
4
3
2
6
22.
Домашнее задание• Найти
наилучший и
наихудший путь
(траекторию) от
А до В
7
10
1
11
8
1
2
5
8
1
2
5
4
4
4
2
4
4
1
3
5
23.
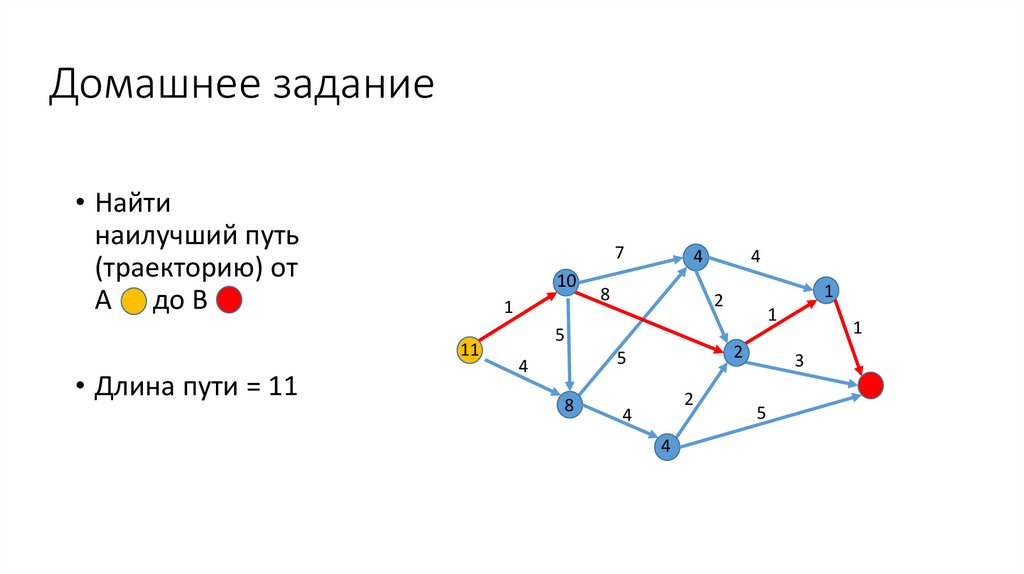
Домашнее задание• Найти
наилучший путь
(траекторию) от
А до В
7
10
1
11
• Длина пути = 11
8
1
2
5
8
1
2
5
4
4
4
2
4
4
1
3
5
24.
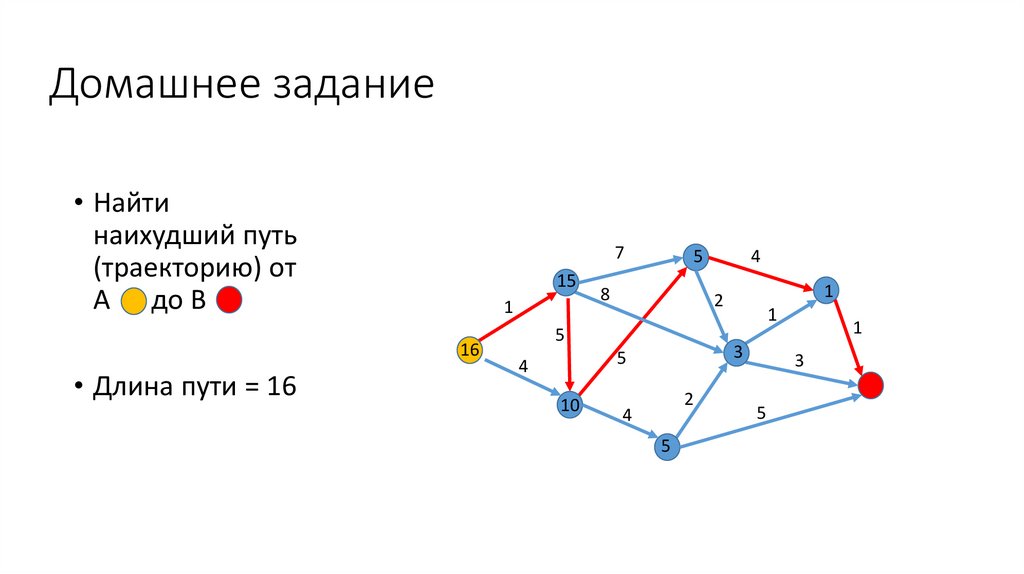
Домашнее задание• Найти
наихудший путь
(траекторию) от
А до В
7
15
1
16
• Длина пути = 16
8
1
3
5
10
1
2
5
4
4
5
2
4
5
1
3
5
25.
Организация• Создание условий, исключающих
(минимизирующих) риск возникновения
отклонений от плановой траектории,
синхронизация, пропорциональность,
ритмичность, непрерывность